Configurer la communication via l’interface standard avec UR e-Series (PolyScope X 10.4 ou supérieur)
Ce document explique comment charger le plugin URCap dans un robot UR e-Series en utilisant PolyScope X 10.4 ou une version supérieure et configurer la communication de l’interface standard entre le système de vision Mech-Mind et le robot.
Vérifier la compatibilité du contrôleur et du logiciel
-
Assurez-vous que le robot est un robot e-Series.
-
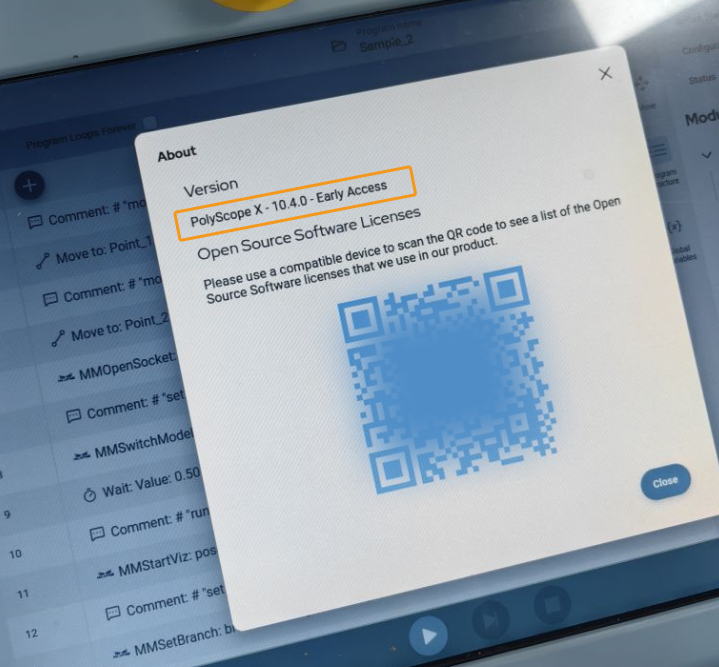
Assurez-vous que PolyScope X 10.4 ou version supérieure est utilisé.
Cliquez ici pour les instructions
-
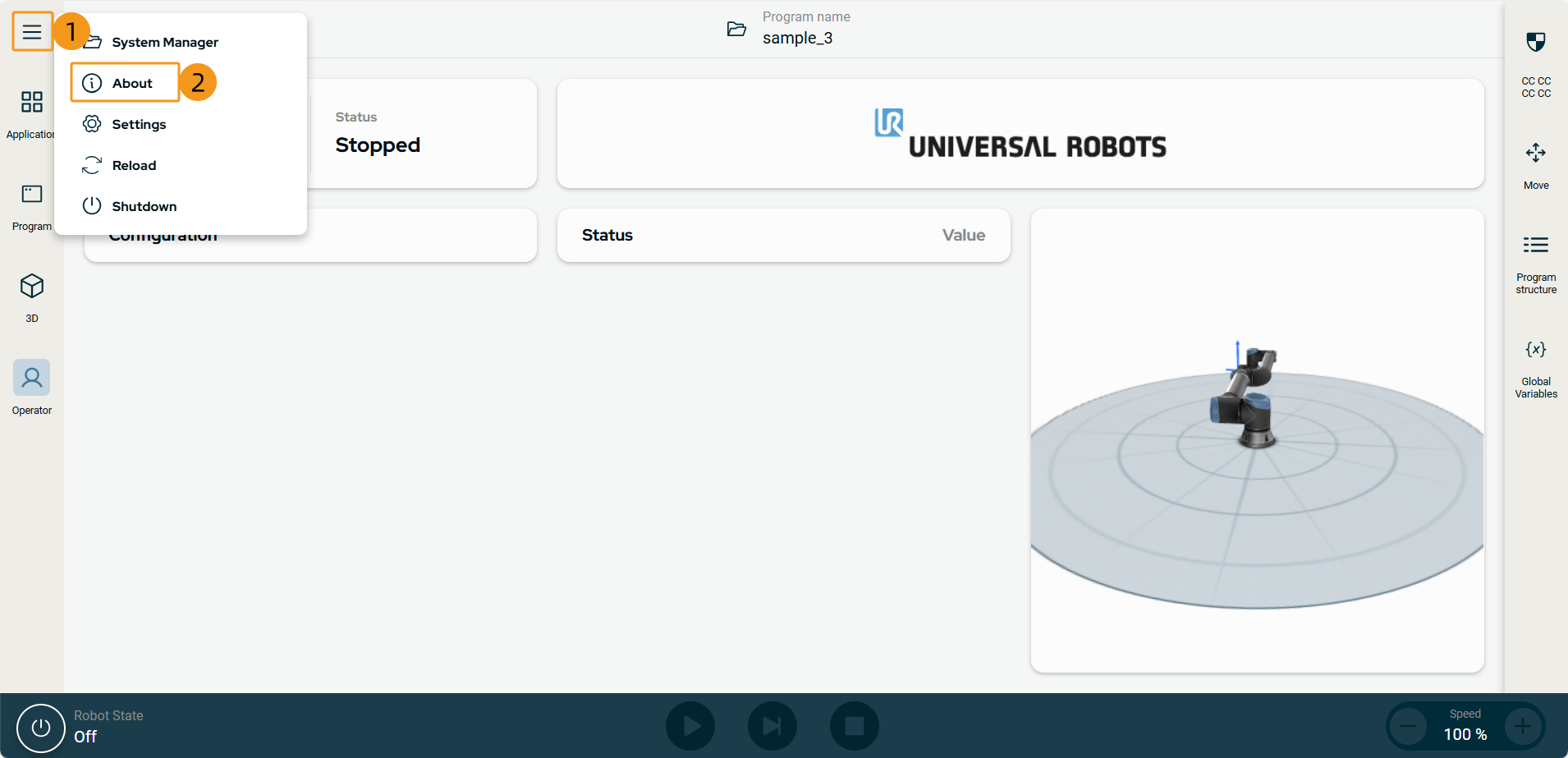
Sélectionnez le menu hamburger dans le coin supérieur droit du pupitre d’enseignement et choisissez À propos.
-
Assurez-vous que PolyScope X 10.4 ou version supérieure est utilisé.
-
Configurer la connexion réseau
Connecter le matériel
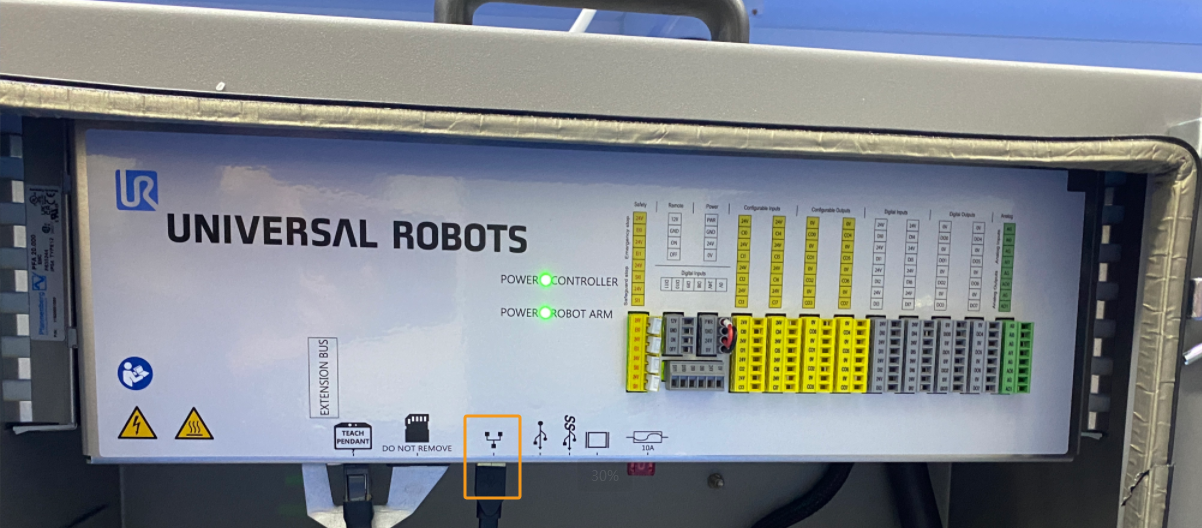
Branchez le câble Ethernet de l’IPC sur le port WAN du contrôleur du robot, comme indiqué ci-dessous.
Définir les adresses IP
-
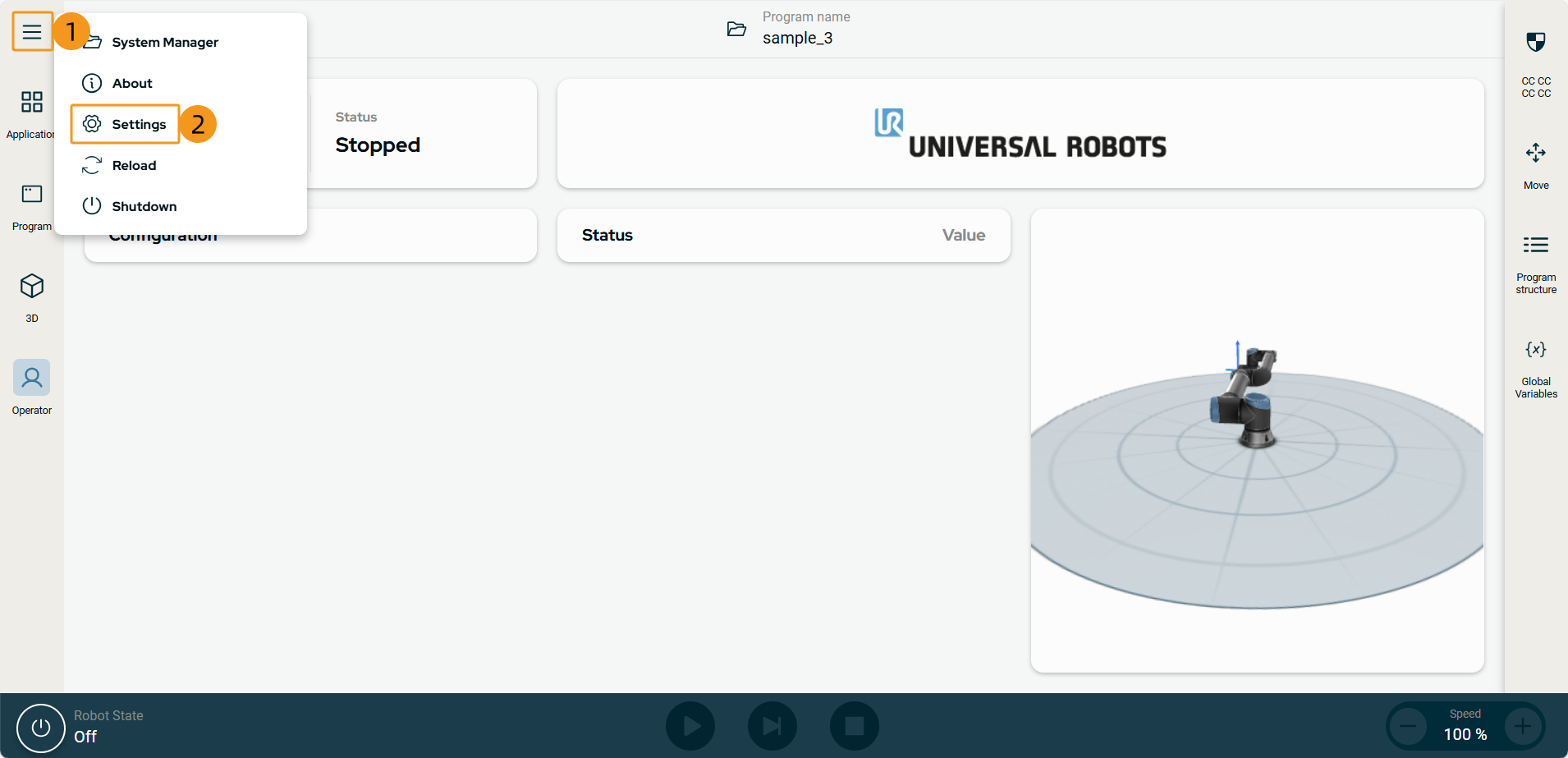
Sélectionnez le menu hamburger dans le coin supérieur droit du pupitre d’enseignement et choisissez Paramètres.
-
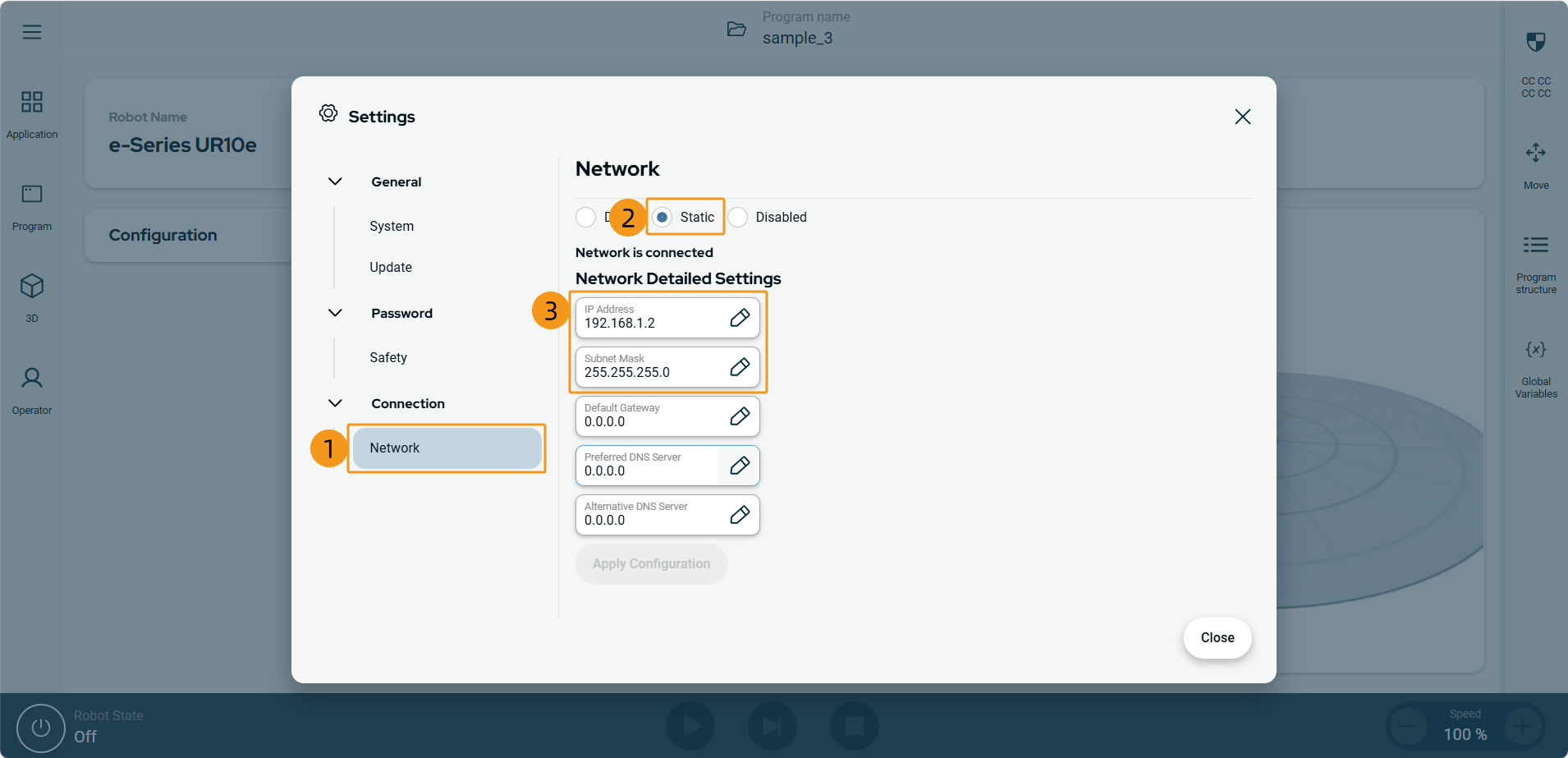
Sélectionnez > Statique et définissez Adresse IP et Masque de sous-réseau. Après avoir défini les paramètres, l’adresse IP et le masque de sous-réseau spécifiés seront affichés sous Adresse IP et Masque de sous-réseau.
-
Dans l’IPC, définir l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, les adresses IP de l’IPC et du contrôleur du robot doivent se trouver dans le même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 se trouvent dans le même sous-réseau.
Configurer « Configuration de la communication du robot »
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
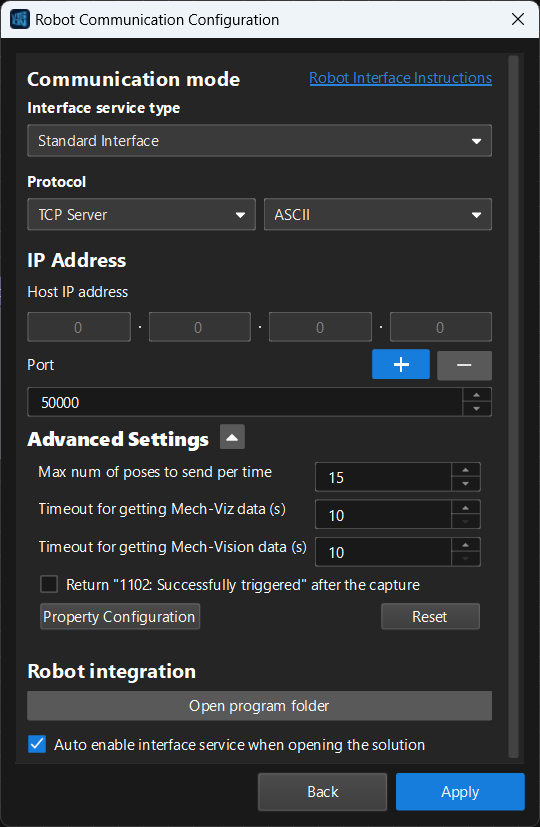
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Dans la section Paramètres avancés, définissez Nombre maximal de poses à envoyer à la fois sur 15.
-
Définissez le numéro de port sur 50000 (valeur fixe). Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger le plugin URCap sur le robot
-
Sur l’IPC, dans le dossier du programme ouvert (dossier
UR_URCAP), accédez au dossierPolyscopeXet copiez le fichier avec l’extension.urcapxdans le répertoire racine de la clé USB (le répertoire le plus externe).-
Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/TM_Plugin_and_Playdans le répertoire d’installation de Mech-Vision et Mech-Viz. -
Le dossier
samplecontient des fichiers de programme d’exemple. Vous pouvez consulter les étapes de ce document pour importer les fichiers de programme d’exemple dans le robot.
-
-
Branchez la clé USB sur le port USB à l’arrière du pupitre d’enseignement du robot.
-
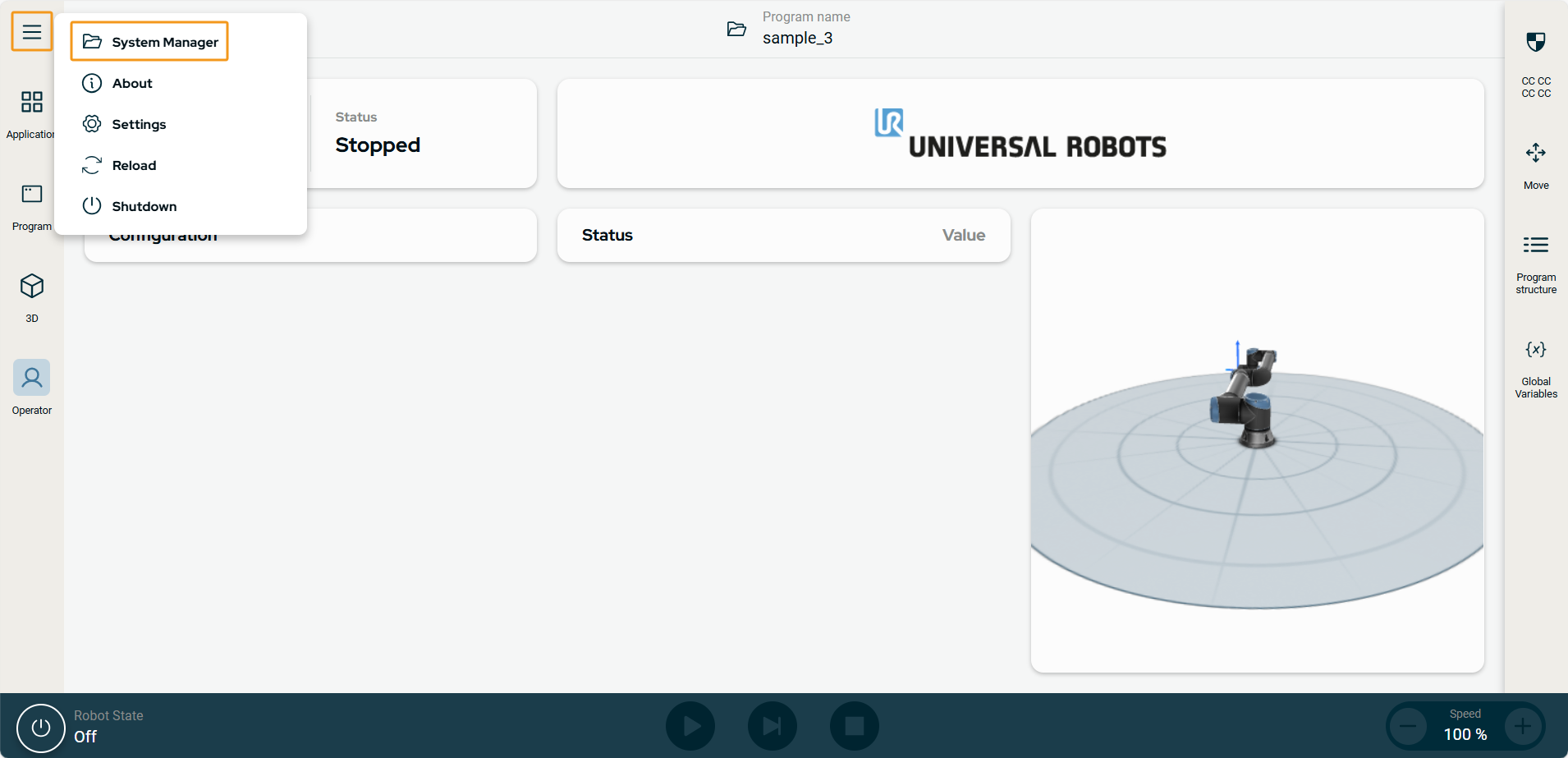
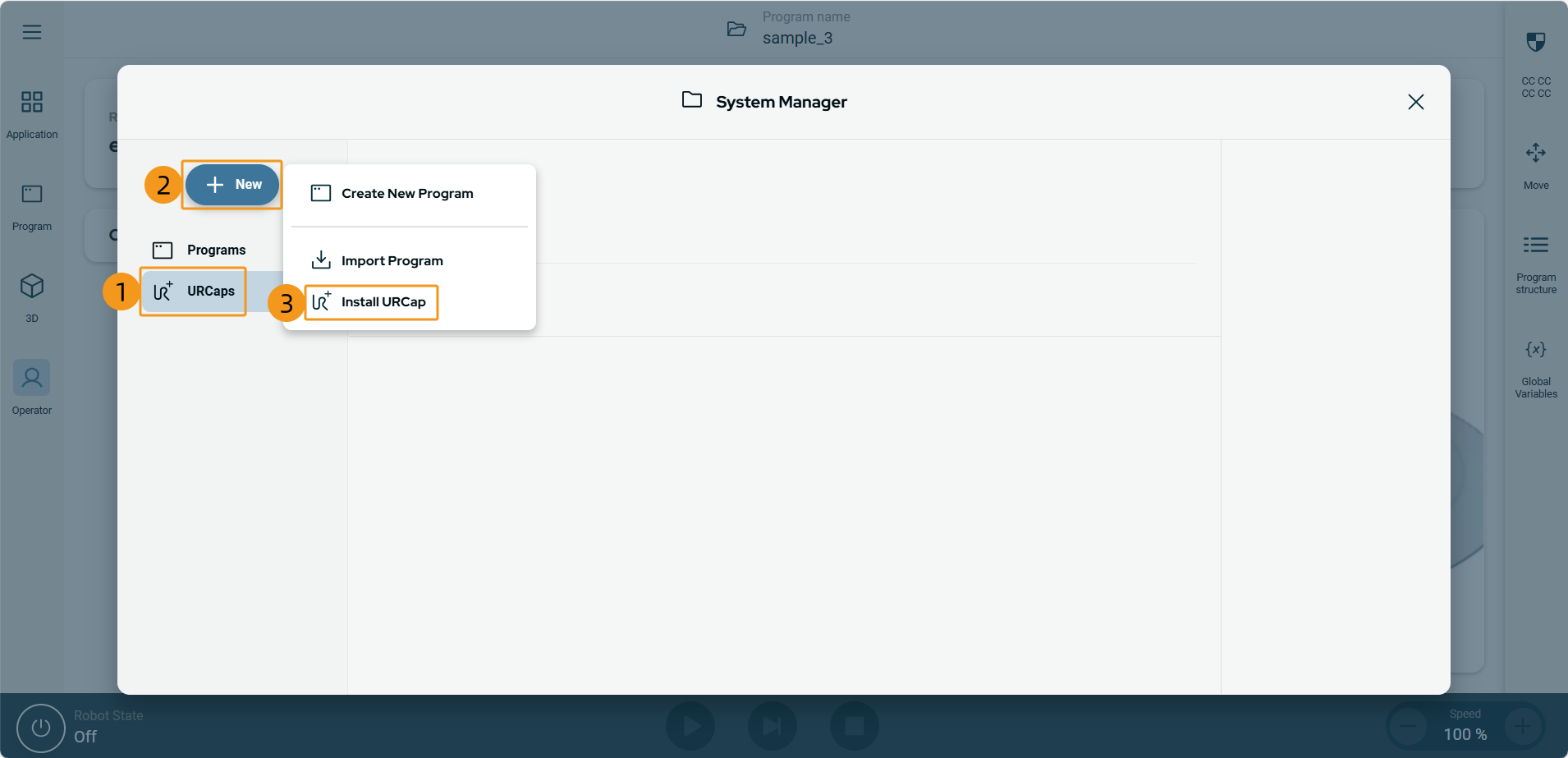
Cliquez sur le menu hamburger dans le coin supérieur gauche du pupitre d’enseignement et sélectionnez Gestionnaire système.
-
Sélectionnez .
-
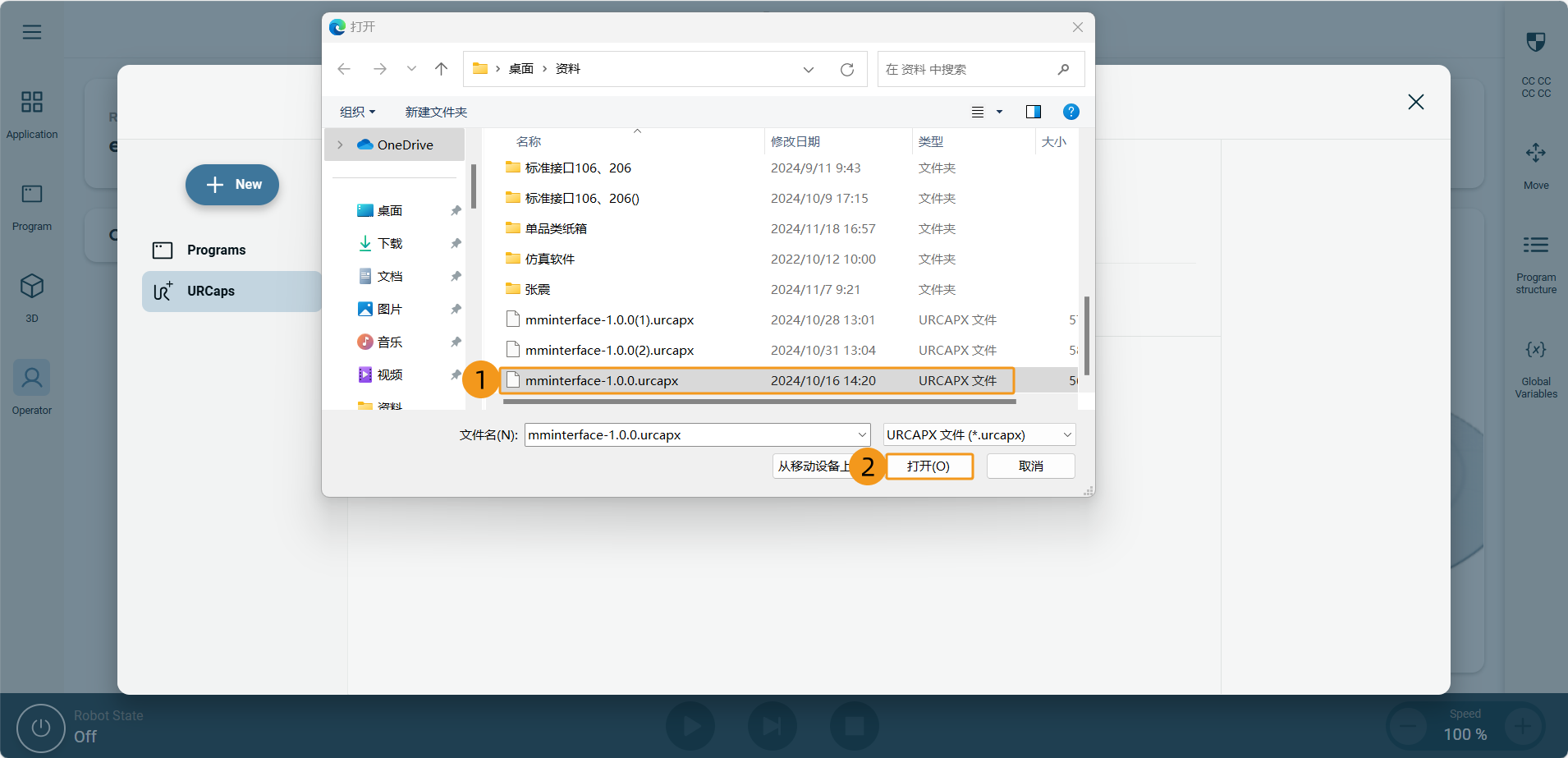
Dans le navigateur de fichiers contextuel, sélectionnez le fichier .urcapx depuis le répertoire racine de la clé USB et cliquez sur Ouvrir.
-
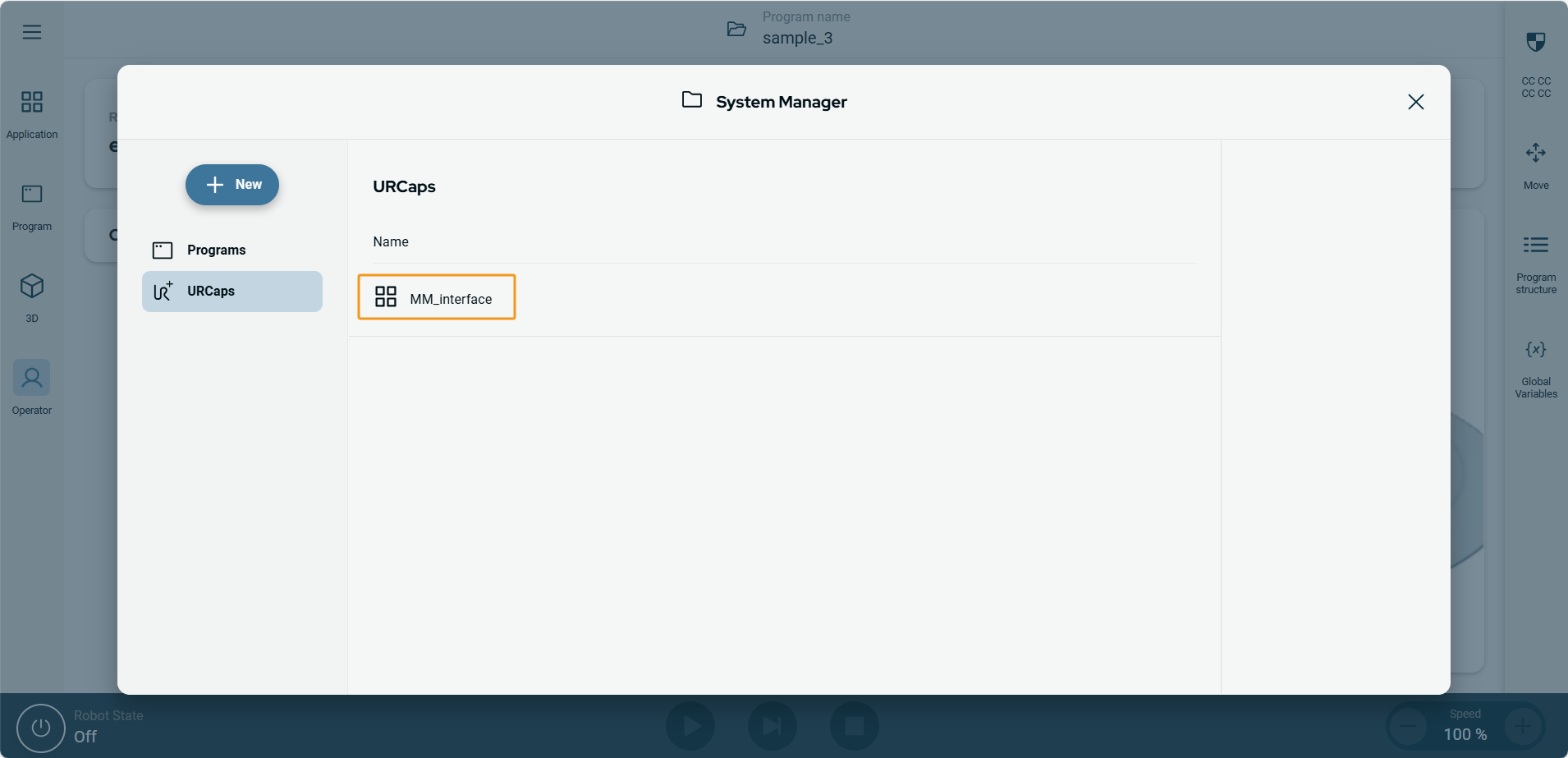
Si le fichier .urcapx s’ouvre correctement, le plugin URCap est chargé. Dans ce cas, MM_interface s’affiche dans l’interface.
Initialiser la communication
-
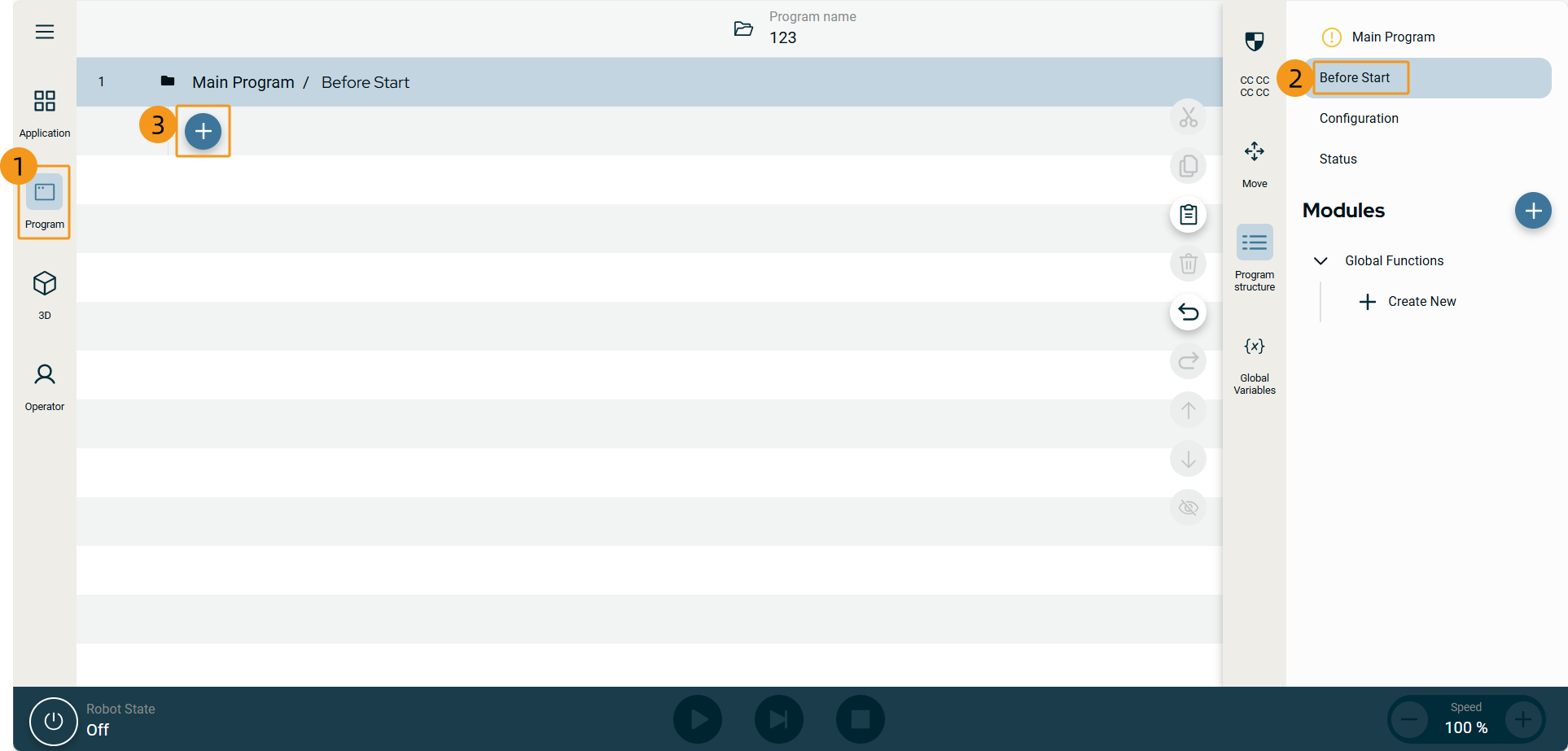
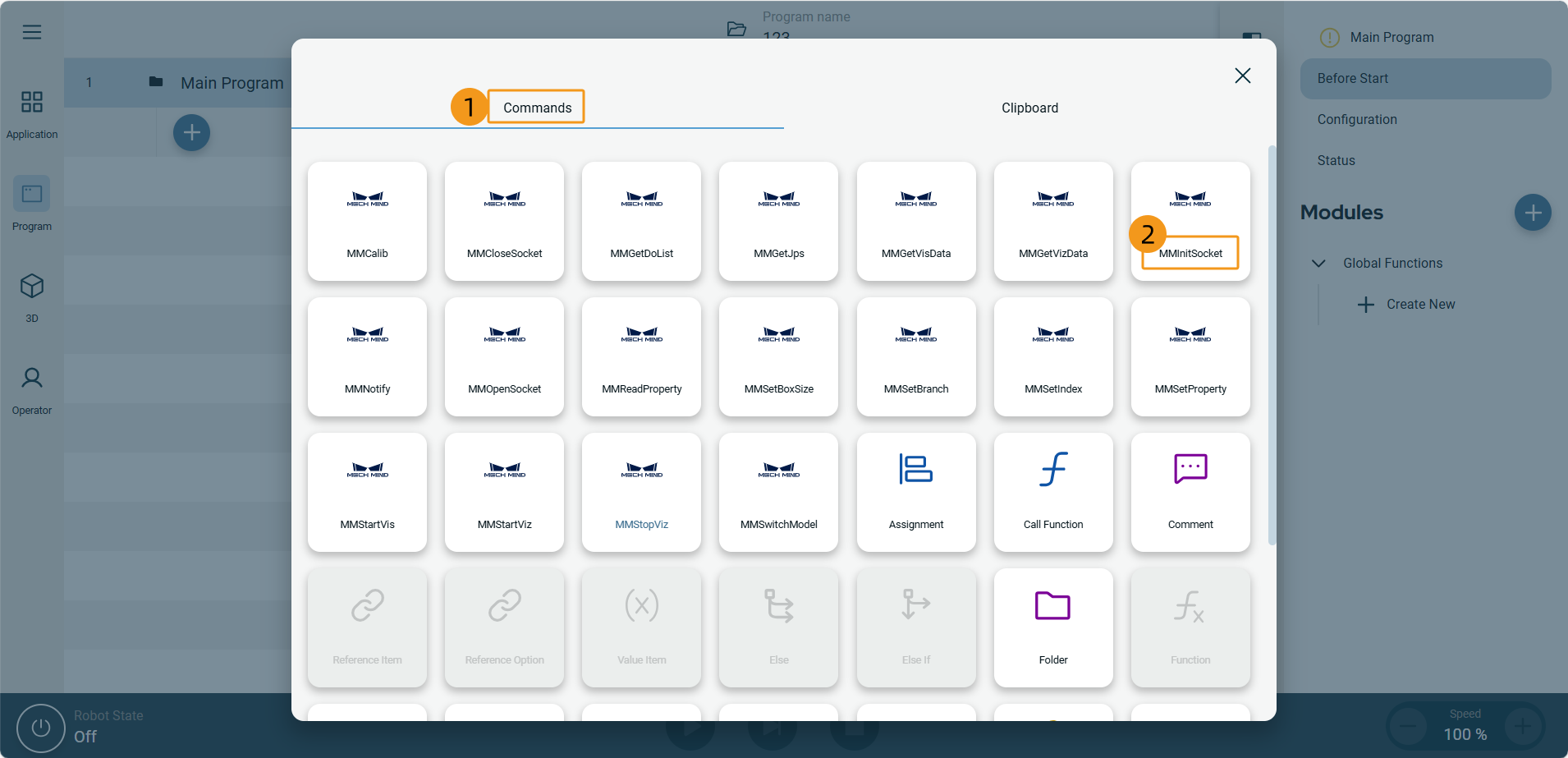
Dans l’interface du pupitre d’enseignement, sélectionnez .
-
Sélectionnez Commandes et sélectionnez MMInitSocket.
-
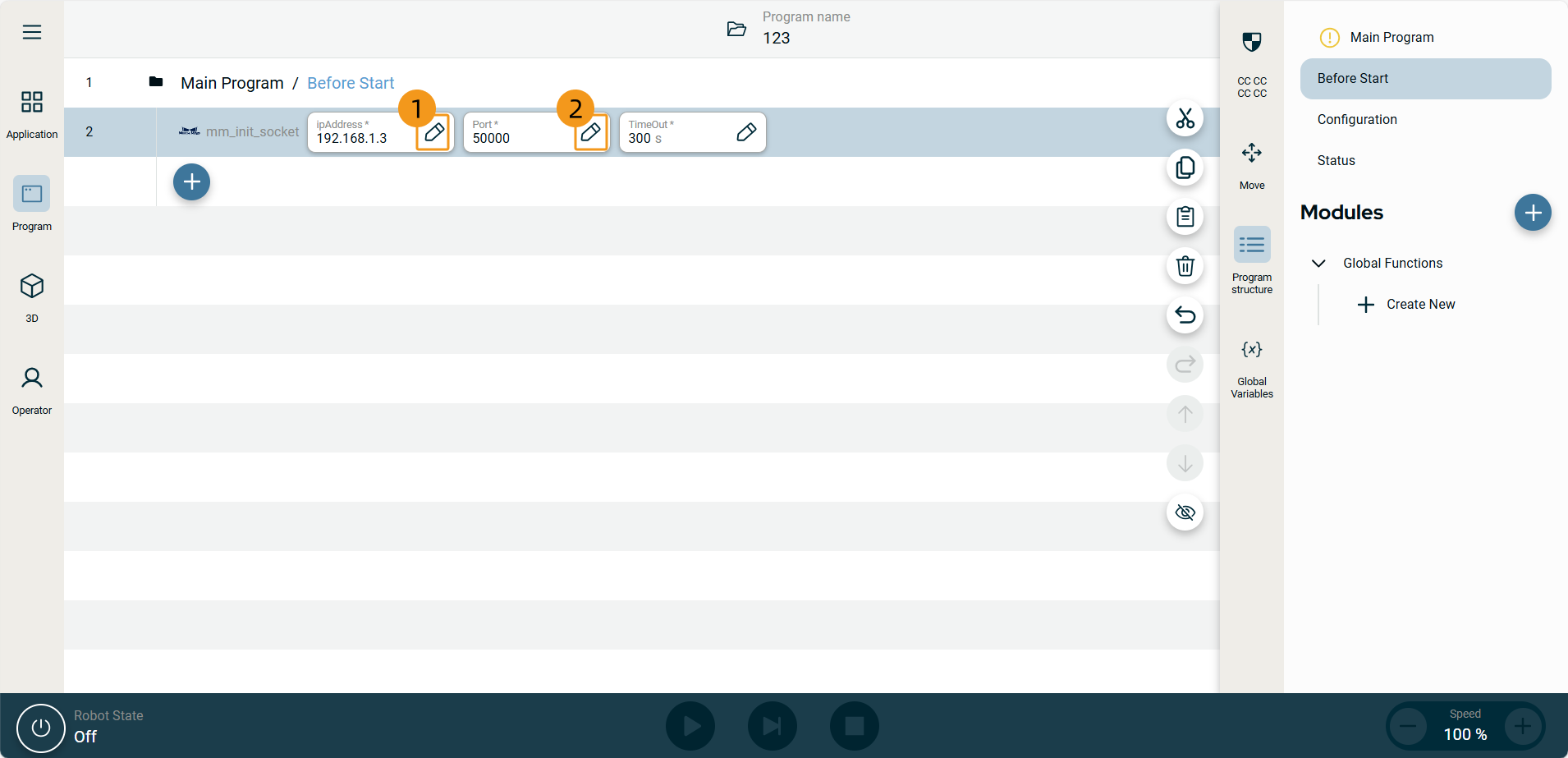
Dans l’interface suivante, définissez ipAddress sur l’adresse IP de l’IPC, Port sur 50000 (Vous devez définir Port sur le numéro de port hôte défini dans Mech-Vision). Après avoir défini les paramètres, l’adresse IP et le numéro de port spécifiés seront affichés dans ipAddress et Port.
Tester la communication via l’interface standard
-
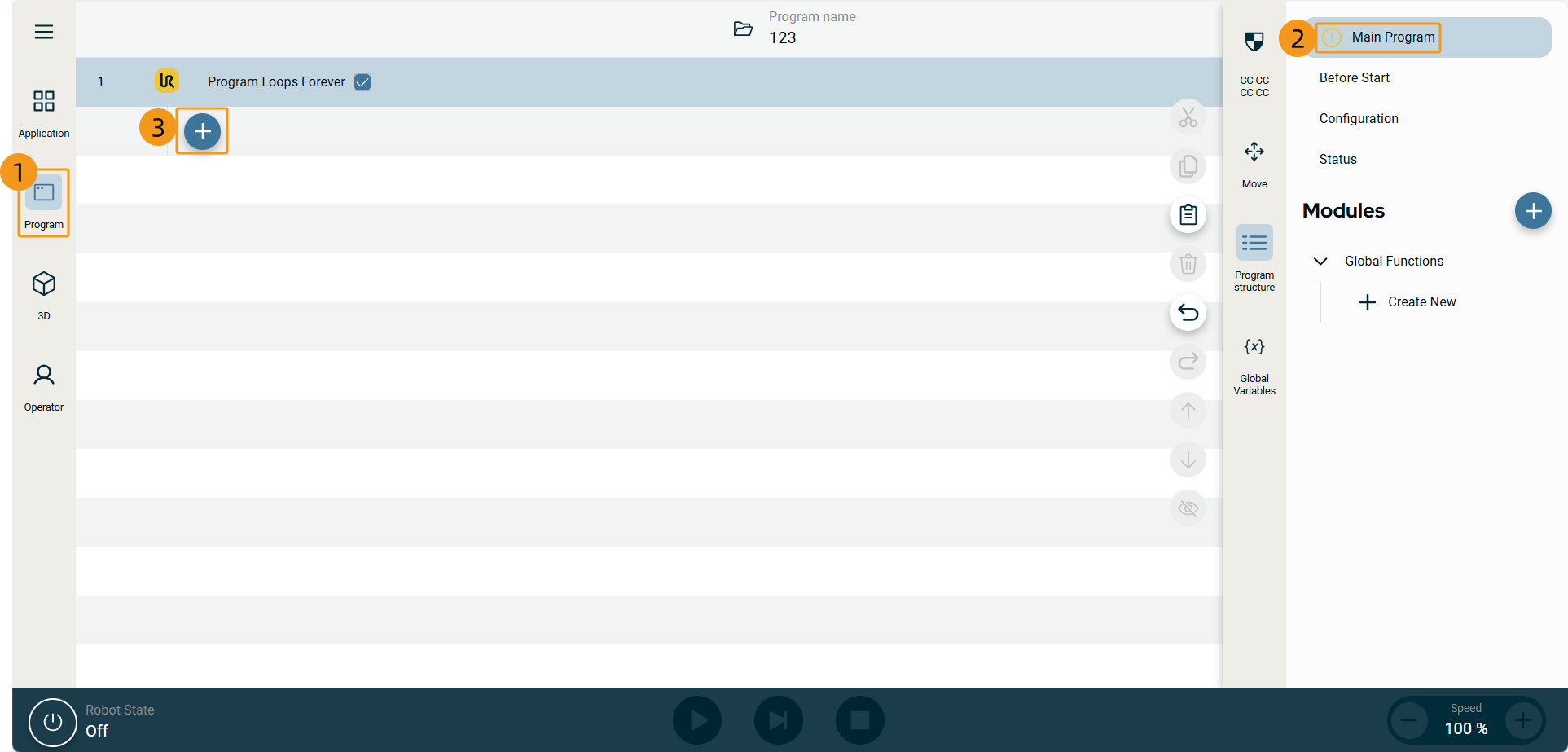
Dans l’interface du pupitre d’enseignement, sélectionnez .
-
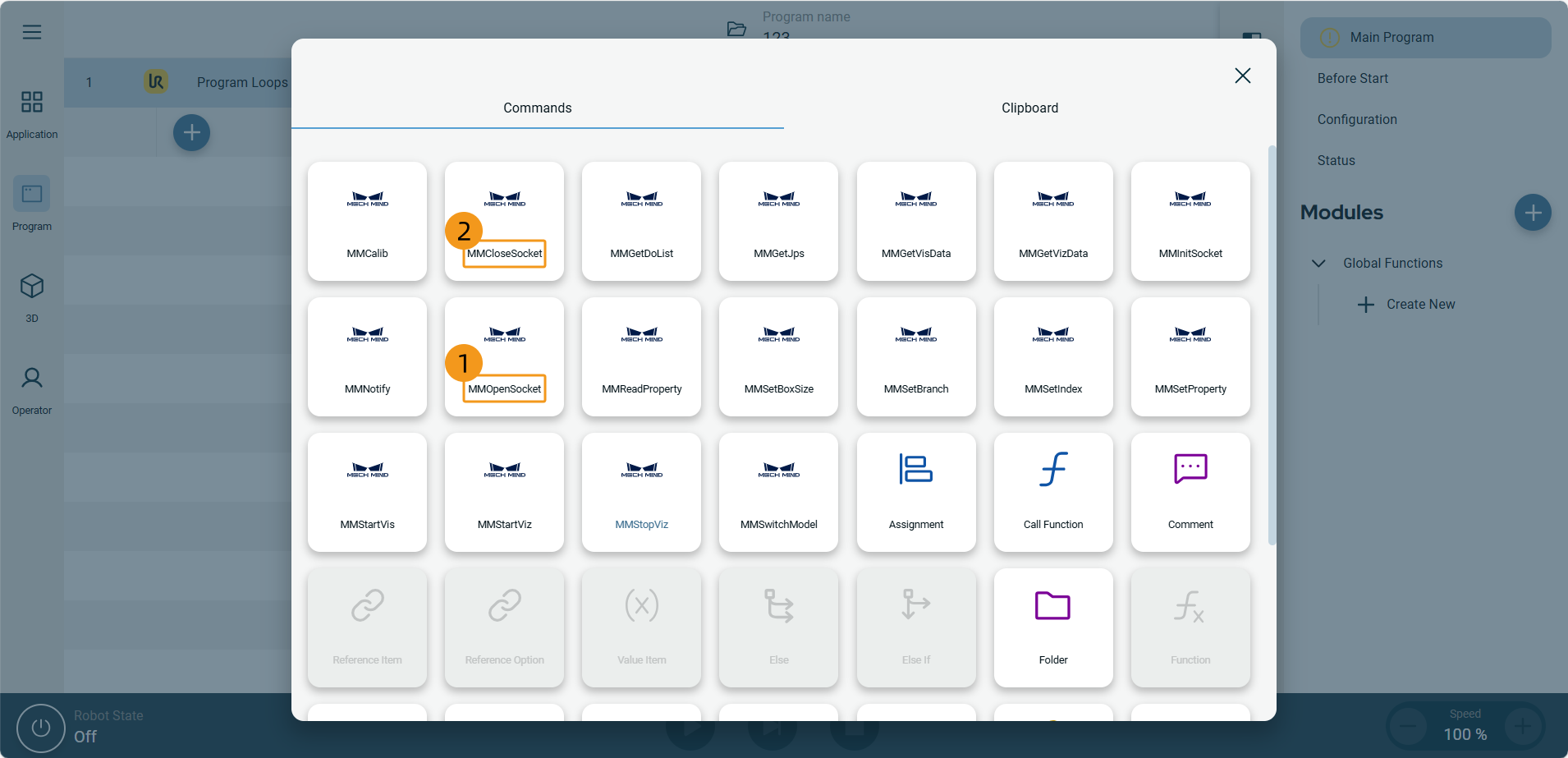
Sélectionnez Commandes. Sélectionnez .
-
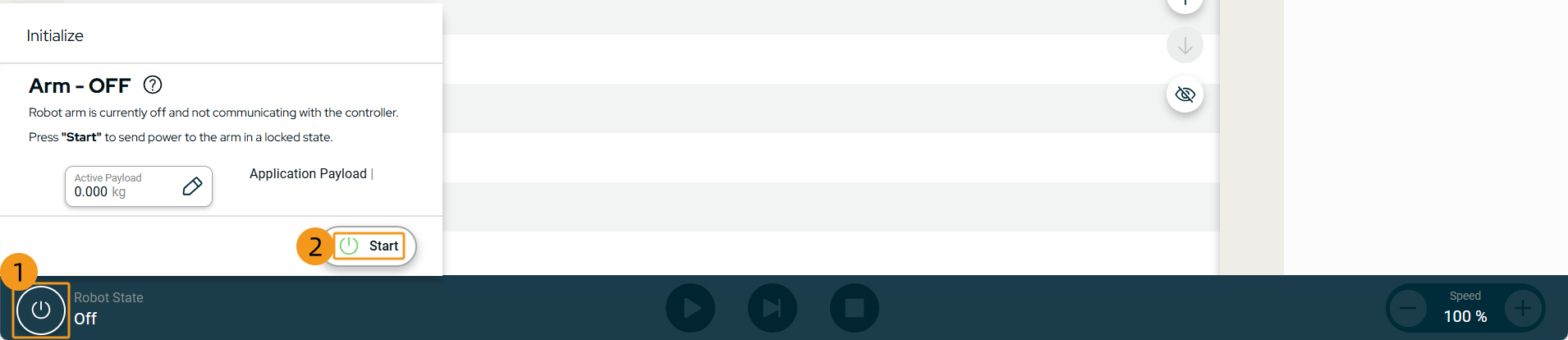
Sélectionnez le bouton d’alimentation dans le coin inférieur gauche et choisissez Démarrer.
-
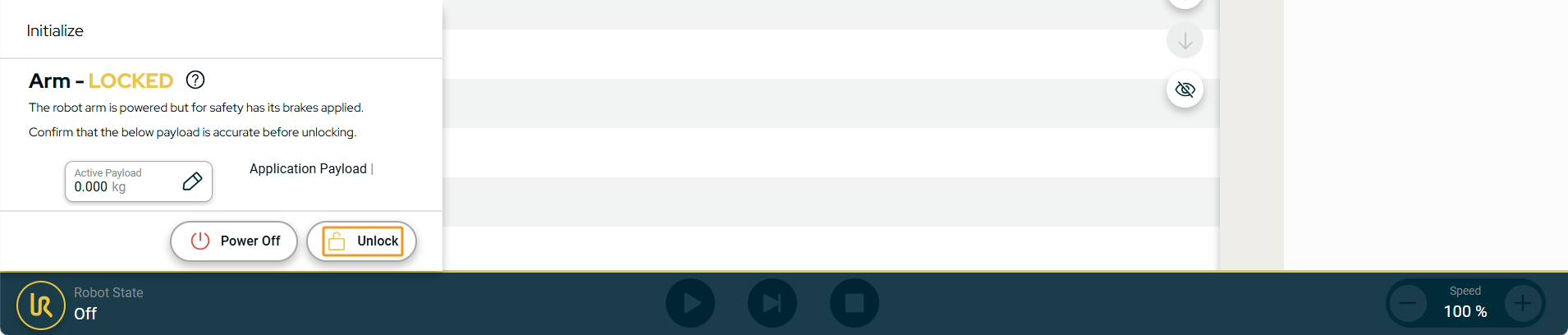
Sélectionnez Déverrouiller.
-
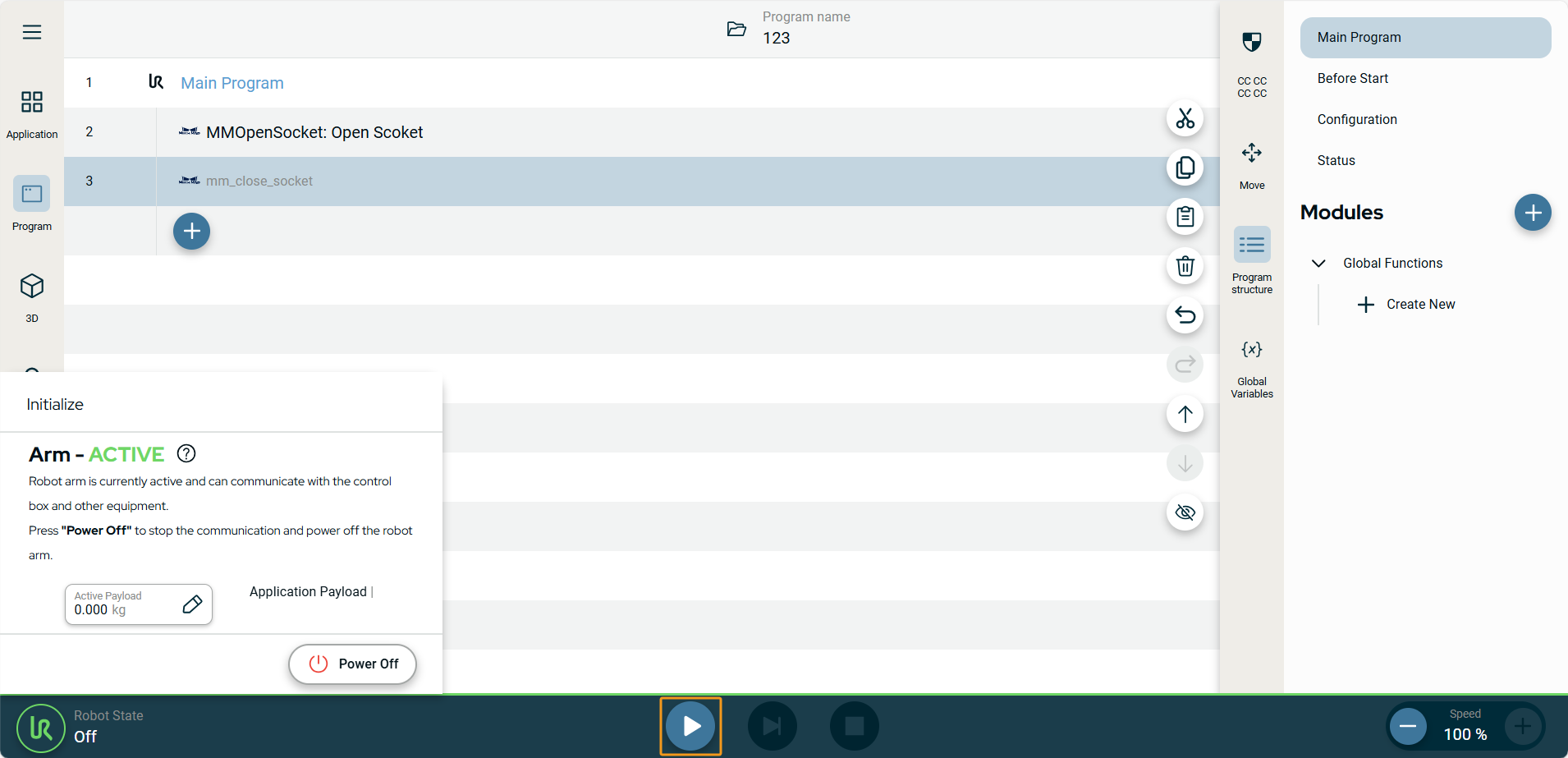
Cliquez sur le bouton d’exécution dans la partie inférieure.
-
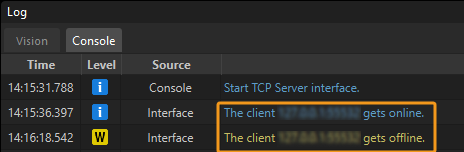
Si la communication entre le robot et le système de vision est configurée, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.