Configurer la communication via l’Interface Standard avec HYUNDAI
Ce guide explique comment configurer la communication via l’Interface Standard avec un robot HYUNDAI.
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Version du contrôleur robot : Hi5a-S ou Hi5a-T10.
Configurer la connexion réseau
Connecter le matériel
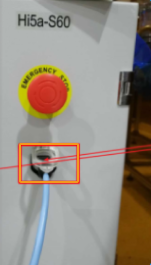
Il y a trois ports à l’intérieur du contrôleur, à savoir CNETN1, CNETN2 et CNETN3, qui correspondent respectivement à l’adresse EN0, à l’adresse TP et à l’adresse Ethernet utilisateur EN2 sur le boîtier d’enseignement. Le port Ethernet à l’extérieur du contrôleur correspond au port CNETN3 à l’intérieur.
-
Pour le contrôleur Hi5a-S, branchez le câble Ethernet de l’IPC sur le port Ethernet extérieur, comme illustré ci-dessous.
-
Pour le contrôleur Hi5a-T10, branchez le câble Ethernet de l’IPC sur le port Ethernet extérieur, comme illustré ci-dessous.

Définir l’adresse IP
-
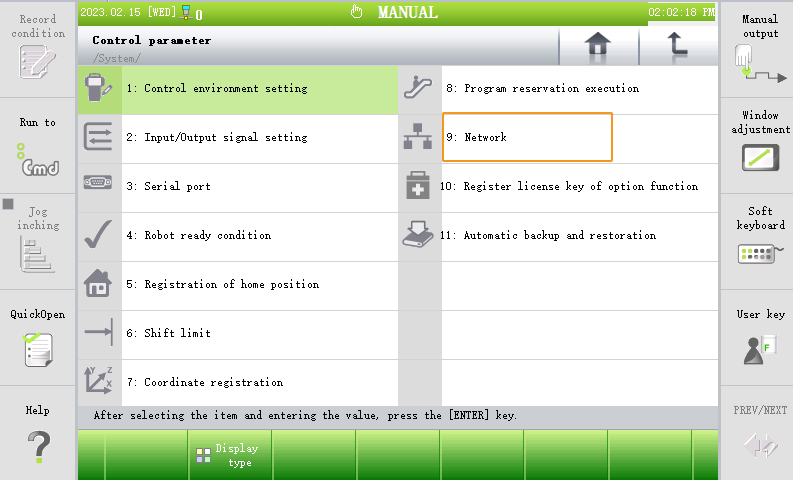
Sur le boîtier d’enseignement, allez à .
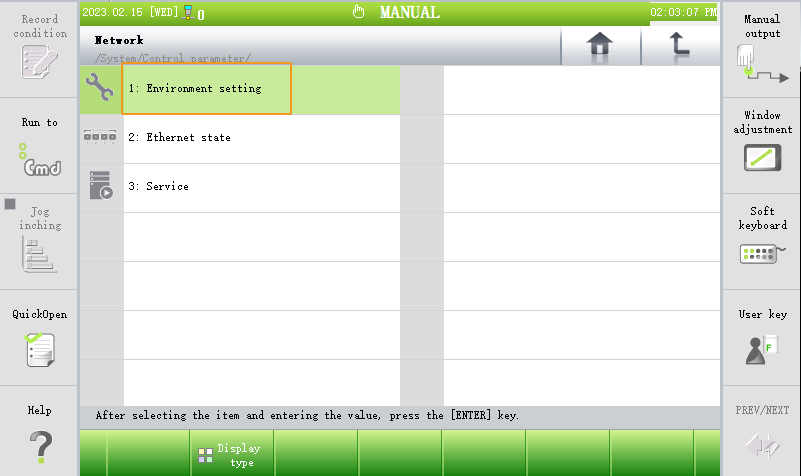
-
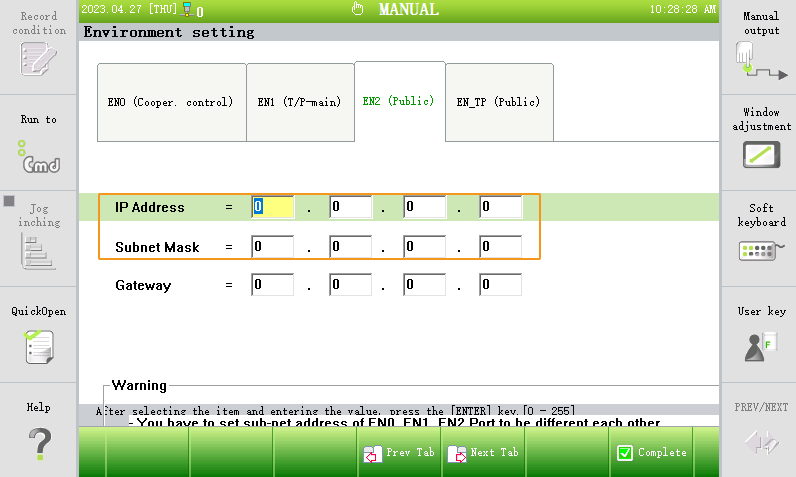
Sélectionnez EN2 (Public), et définissez Adresse IP et Masque de sous-réseau.
-
L’adresse IP du robot doit être sur le même sous-réseau que l’IPC.
-
Le masque de sous-réseau de l’IPC est identique à celui du robot, à savoir 255.255.255.0.
-
Redémarrez le robot après avoir modifié l’adresse IP.
-
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
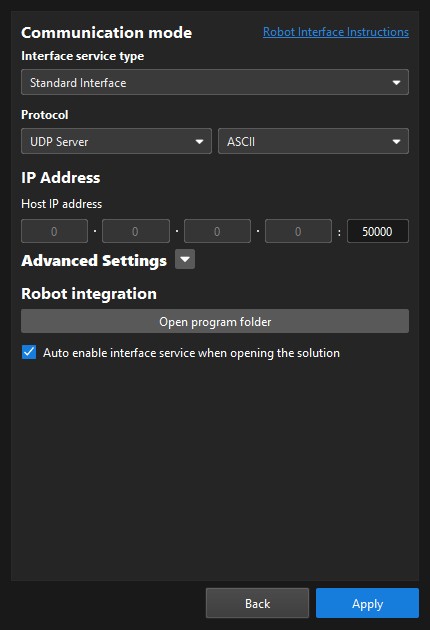
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur UDP pour Protocole, et ASCII pour le format de protocole.
-
Définissez le numéro de port sur une valeur inférieure à 9999 (par exemple 8000) et assurez-vous que le numéro de port défini n’est pas occupé par d’autres programmes.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Préparer les fichiers de programme
-
Ouvrez le dossier
Hi5dans le dossier de programmes ouvert (le dossierHYUNDAI).Vous pouvez également trouver le dossier de programme dans le chemin
Communication Component/Robot_Interface/HYUNDAIdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Dans le dossier
Hi5, veuillez modifier la première ligne de chaque fichier .JOB selon les modèles de robot spécifiques, par exemple, « Version du format de fichier du programme : 1.6 Type mécanique: 739(HH4-01) Nombre total d’axes: 6 Axes auxiliaires: 0 ».-
Si le modèle de robot spécifique est connu, modifiez le fichier.
-
Si le modèle de robot est inconnu, mais que le fichier .JOB est dans le robot, exportez le fichier de programme, et copiez la première ligne pour remplacer la première ligne de chaque fichier .JOB dans le dossier
Hi5. -
Si le modèle de robot est inconnu et que le fichier .JOB n’est pas dans le robot, veuillez vous référer à Créer un fichier de programme et à Exporter le fichier de programme pour créer un fichier .JOB.
-
-
Branchez la clé USB sur le port USB de l’IPC. Copiez le dossier
Hi5modifié sur la clé USB puis retirez la clé USB en toute sécurité.
Charger les fichiers de programme sur le robot
-
Connectez la clé USB au boîtier d’enseignement.
-
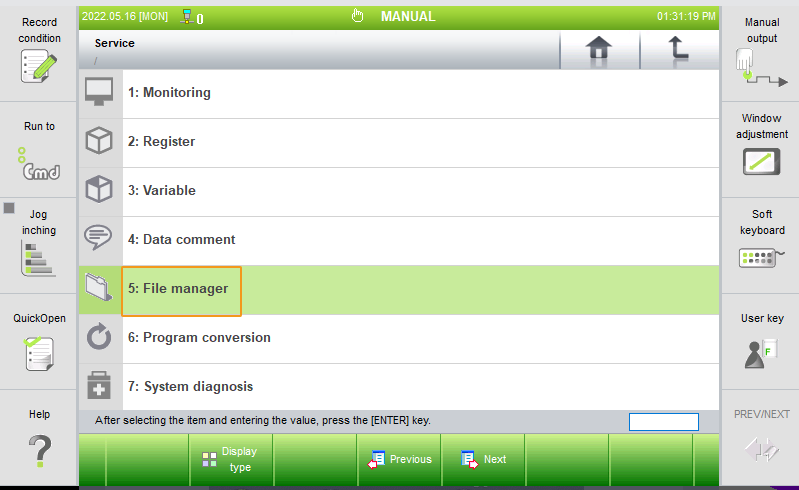
Allez à , sélectionnez tous les fichiers JOB du dossier
Hi5, puis sélectionnez Copier dans le panneau inférieur. Ensuite, basculez vers le dossier T/P et sélectionnez Coller dans le panneau inférieur pour charger les fichiers sur le robot.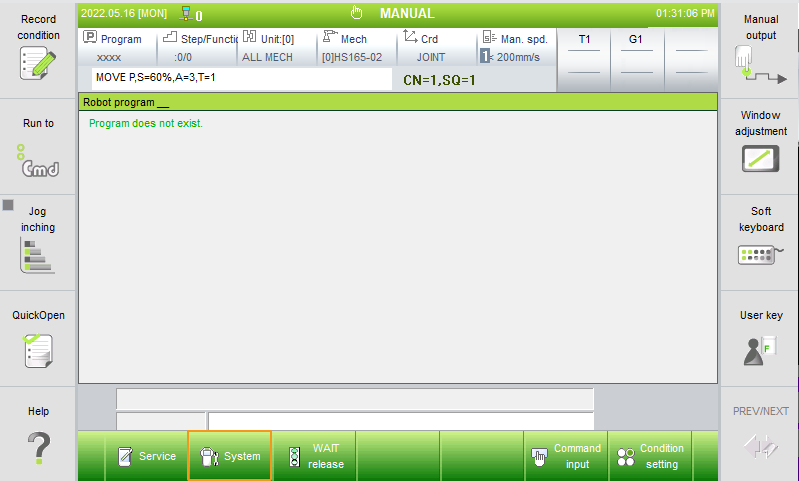
Configuration supplémentaire
-
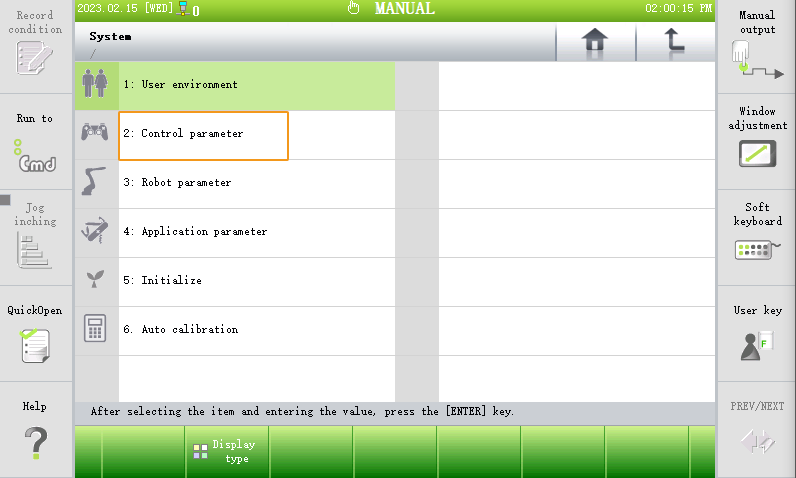
Allez à .
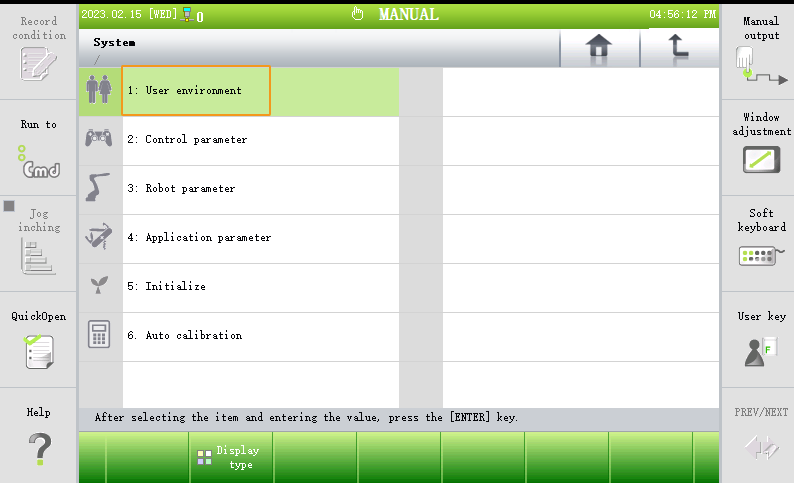
-
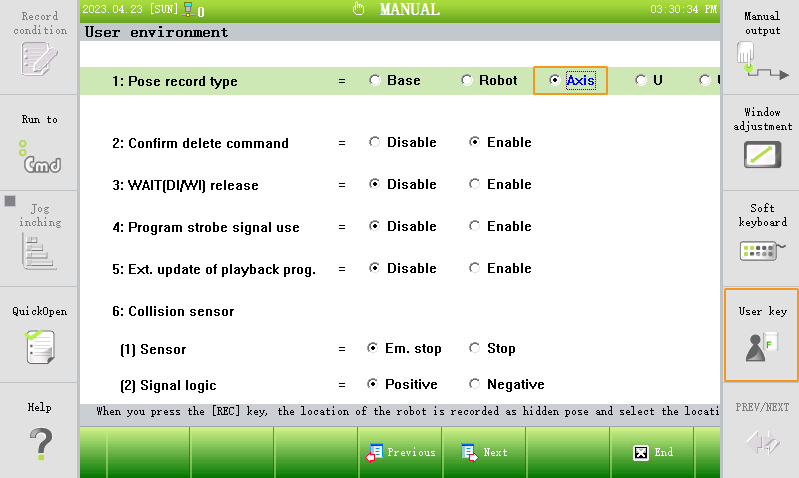
Sélectionnez Clé utilisateur, et saisissez 314 pour demander l’autorisation.
-
Sur Type d’enregistrement de pose, appuyez sur le bouton Shift sur le boîtier d’enseignement et sur le bouton gauche/droite pour sélectionner Axe.
Tester la communication de l’Interface Standard
-
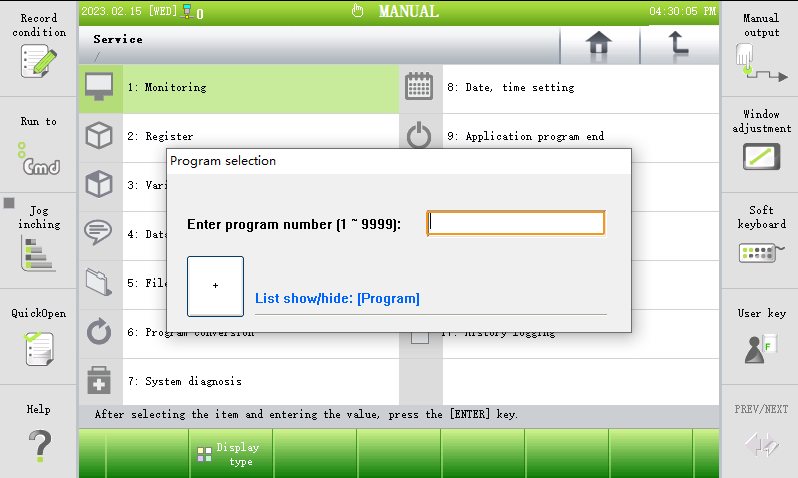
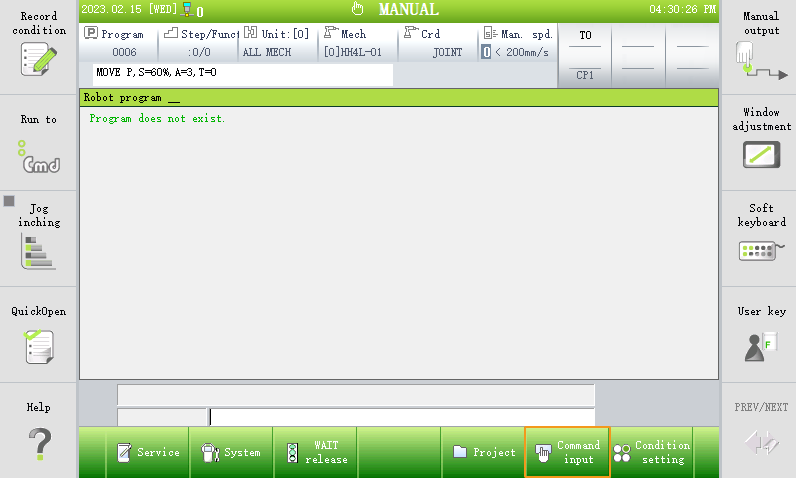
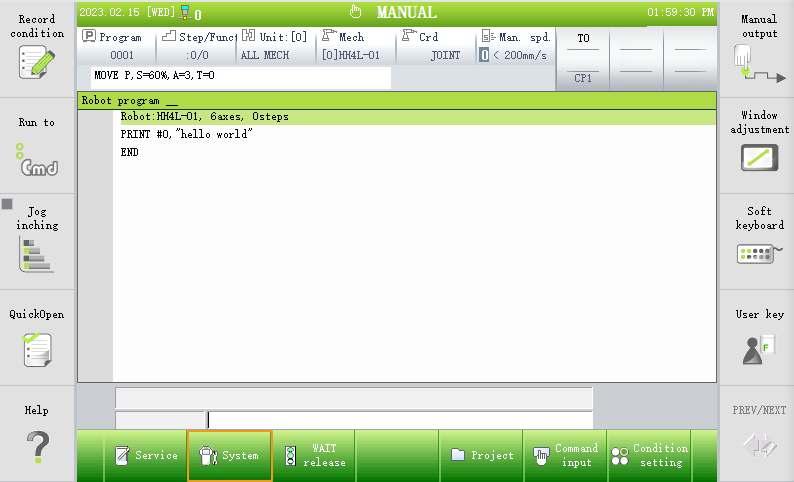
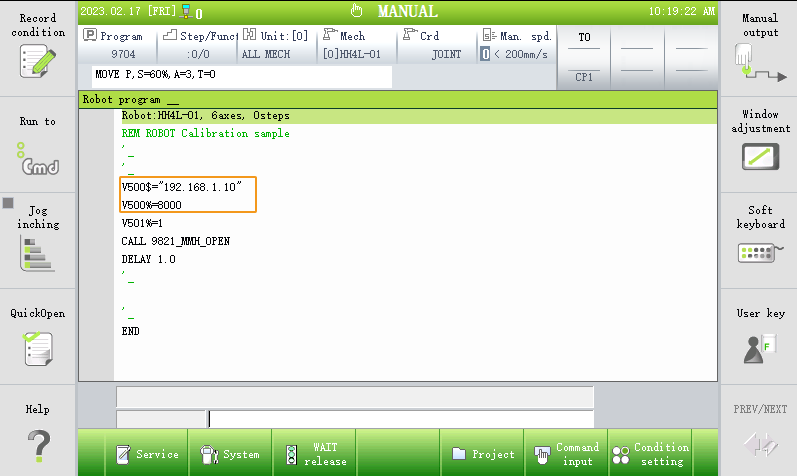
Sur le boîtier d’enseignement, sélectionnez Programme dans le coin supérieur gauche et saisissez le numéro de programme 9704 pour ouvrir le programme.
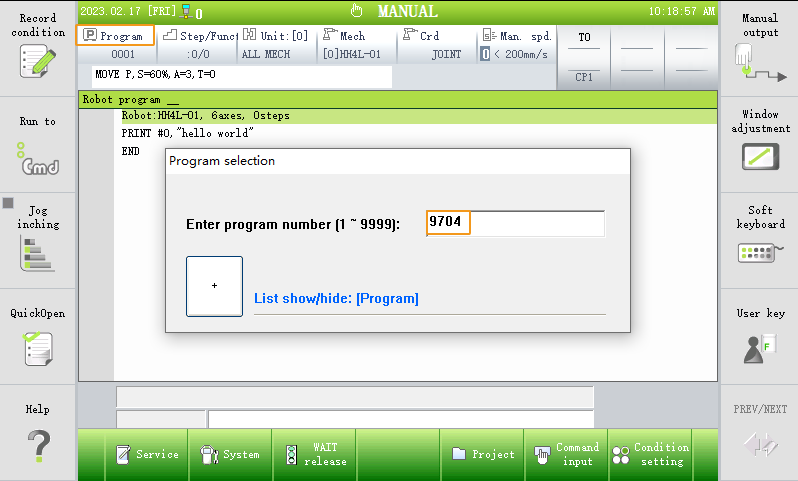
-
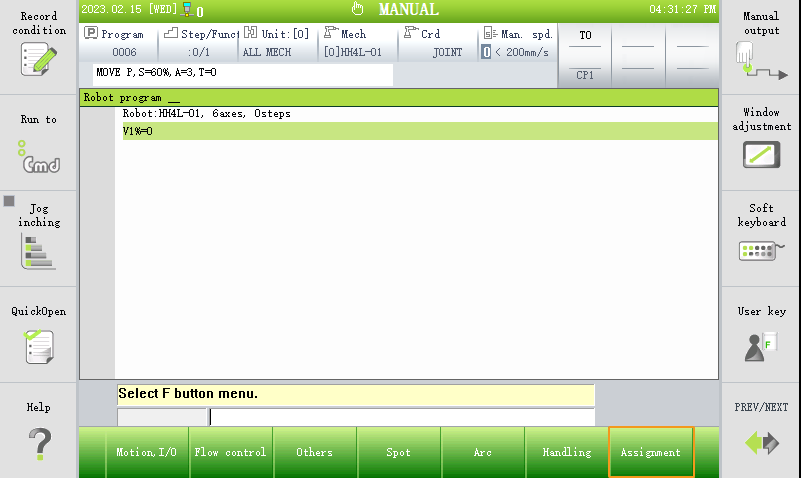
Modifiez la valeur de V500$ à l’adresse IP de l’IPC, et définissez la valeur de V500% sur le numéro de port configuré dans Mech-Vision.
-
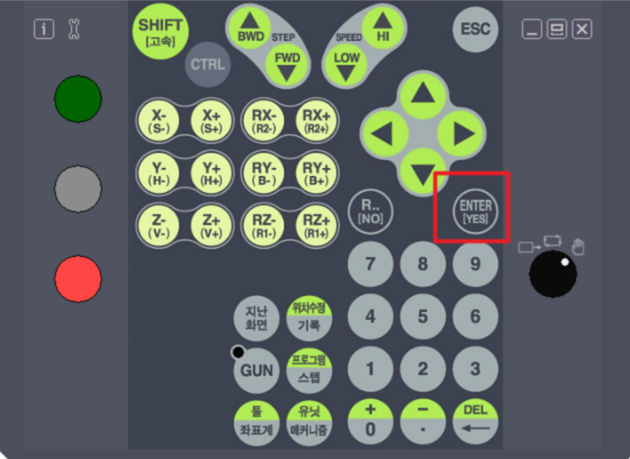
Passez en mode AUTO, et appuyez sur DÉMARRER pour exécuter le programme robot 9704.