Exemple de programme 20: MM_S20_Viz_PlanAllVision
Présentation du programme
Description |
Le robot déclenche l’exécution du projet Mech-Viz. Ensuite, le robot utilise des boucles for pour obtenir toutes les trajectoires planifiées et effectuer la prise et la dépose. Dans cet exemple, une fois que la caméra capture une image, Mech-Viz planifie des trajectoires de prise pour tous les résultats de vision. Ce programme s’applique aux scénarios où une image est utilisée pour effectuer la prise plusieurs fois. |
||
Chemin du fichier |
Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin |
||
Projet |
Projets Mech-Vision et Mech-Viz
|
||
Prérequis |
|
| Ce programme d’exemple est fourni uniquement à titre de référence. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette partie décrit le programme d’exemple MM_S20_Viz_PlanAllVision.
| La seule différence entre le programme d’exemple MM_S20_Viz_PlanAllVision et le programme d’exemple MM_S2_Viz_Basic est que MM_S20_Viz_PlanAllVision peut utiliser des boucles for pour obtenir toutes les trajectoires planifiées et effectuer la prise et la dépose (le code correspondant à cette fonctionnalité est en gras). Par conséquent, les fonctionnalités du programme MM_S20_Viz_PlanAllVision similaires à celles de MM_S2_Viz_Basic ne sont pas décrites dans cette partie. Pour plus d’informations sur ces fonctionnalités, voir Exemple de programme 2: MM_S2_Viz_Basic. |
DEF MM_S20_Viz_PlanAllVision ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Viz project, plan all
; vision results and get all planned results using
; command 210
; Mech-Mind, 2023-12-25
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
PTP HOME Vel=100 % DEFAULT
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
RECAP:
;move to image-capturing position
LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0]
;trigger Mech-Viz project
MM_Start_Viz(2,init_jps)
;get planned path
MM_Get_PlanData(0,3,pos_num,vis_pos_num,status)
;check whether planned path has been got from Mech-Viz successfully
IF status<> 2100 THEN
;add error handling logic here according to different error codes
;e.g.: status=2038 means no point cloud in ROI
halt
ENDIF
;save waypoints of the planned path to local variables one by one
FOR count=1 TO pos_num
MM_Get_PlanJps(count,3,pick_point[count],move_type[count],tool_num[count],speed[count])
ENDFOR
;parse pick cycle count, here suppose 3 points per planned path
pick_cnt = pos_num / 3
residual = pos_num - pick_cnt*3
;check if parsed data is valid; if not, retry to get planned path or add some error handling logic
IF (pick_cnt<1) OR (residual<>0) THEN
halt
GOTO RECAP
ENDIF
;repeatedly run pick-and-place cycle using for-loop
FOR i=1 TO pick_cnt
count=(i-1)*3
Xpick_point1=pick_point[1+count]
Xpick_point2=pick_point[2+count]
Xpick_point3=pick_point[3+count]
;move to intermediate waypoint of picking
PTP pick_waypoint CONT Vel=50 % PDAT7 Tool[1] Base[0]
;follow the planned path to pick
PTP pick_point1 Vel=50 % PDAT1 Tool[1] Base[0]
PTP pick_point2 Vel=10 % PDAT2 Tool[1] Base[0]
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
PTP pick_point3 Vel=50 % PDAT3 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
;move to approach waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move to placing waypoint
LIN drop Vel=0.3 m/s CPDAT4 Tool[1] Base[0]
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
ENDFOR
;finish pick and-place cycle, and jump back to camera capturing
GOTO RECAP
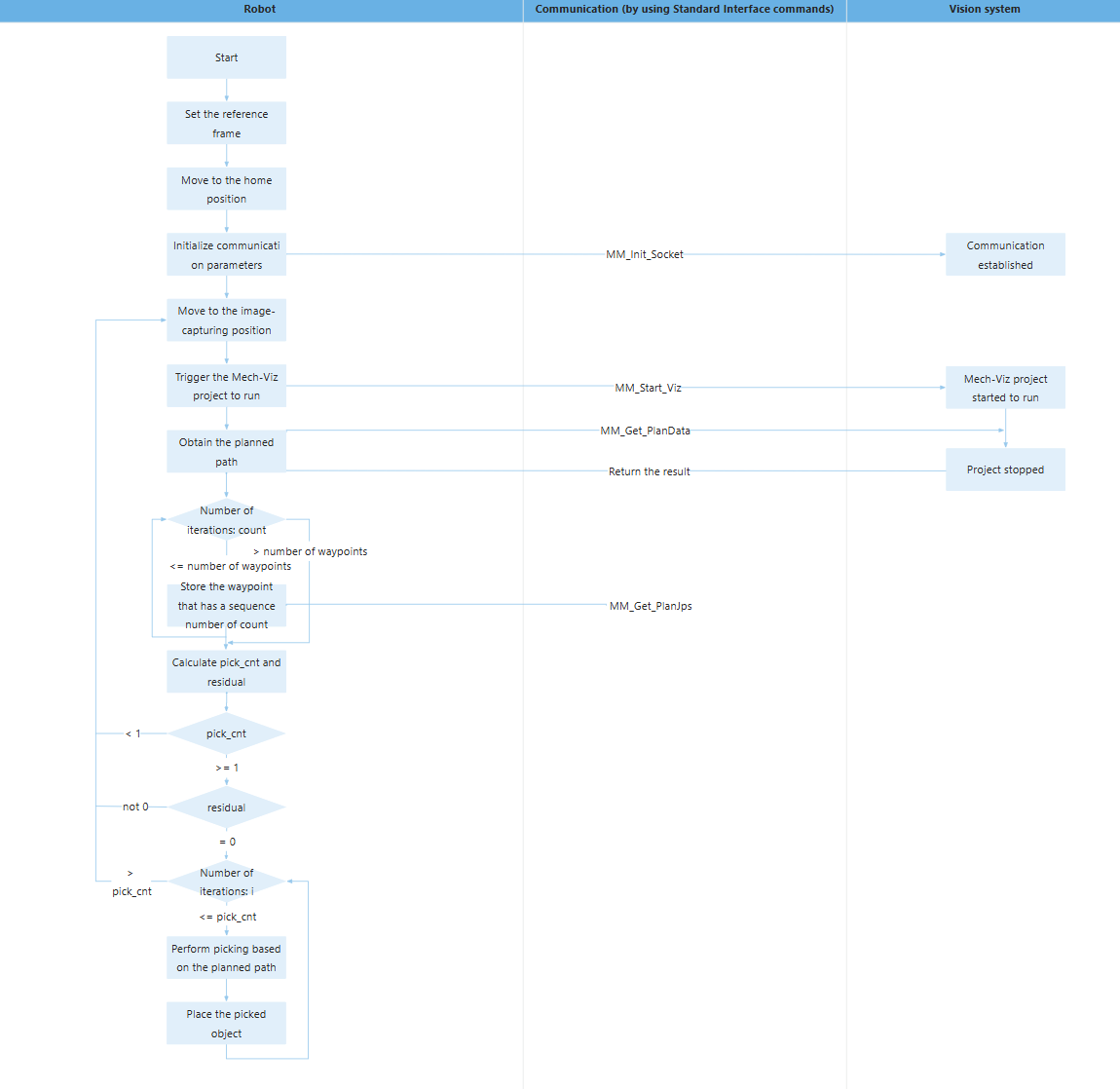
ENDLe flux de travail correspondant au code de l’exemple de programme ci-dessus est illustré dans la figure ci-dessous.
Le tableau ci-dessous décrit la fonctionnalité consistant à utiliser des boucles for pour obtenir toutes les trajectoires planifiées et effectuer la prise et la dépose. Vous pouvez cliquer sur l’hyperlien du nom de commande pour consulter sa description détaillée.
| Fonctionnalité | Code et description |
|---|---|
Obtenir la trajectoire planifiée |
|
Stocker la trajectoire planifiée par bouclage |
|
Calculer pick_cnt et residual |
Ce programme d’exemple suppose que chaque trajectoire de prise planifiée contient 3 points de passage. "pick_cnt = pos_num / 3" représente le quotient de la valeur pose_num divisée par 3, et "pos_num - pick_cnt*3" représente le reste de la valeur pose_num divisée par 3. pick_cnt est le nombre total de prises planifiées. Si residual n’est pas égal à 0, le nombre de points de passage de prise planifié est inférieur à 3 (c’est-à-dire qu’une erreur s’est produite lors de la planification de trajectoire et qu’une replanification est nécessaire). |
Déterminer si une erreur s’est produite lors de la planification de trajectoire |
Si le nombre de prises (pick_cnt) est inférieur à 1 ou si la valeur de residual n’est pas 0, une erreur s’est produite lors de la planification de trajectoire. Vous devez ajouter ici du code de traitement, comme le code pour redémarrer le projet Mech-Viz puis obtenir la trajectoire planifiée. |
Effectuer la prise et la dépose par bouclage |
Le code ci-dessus indique que dans la boucle for, le robot se déplace vers les 3 points de passage planifiés à chaque fois pour effectuer l’opération de prise, puis réalise l’opération de dépose. i est utilisé pour contrôler le nombre d’itérations de la boucle (c’est-à-dire que i démarre à 1 et s’incrémente de 1 après chaque itération jusqu’à dépasser la valeur de pick_cnt, moment auquel la boucle se termine. Lorsque i s’incrémente de 1, count s’incrémente de 3. [1+count] à [3+count] désignent l’ID des 3 points de passage planifiés à chaque fois dans la trajectoire planifiée totale. |