mm_vision_pick_and_place
Le programme déclenche l’exécution du projet Mech-Vision afin d’obtenir le résultat de vision pour la prise et la dépose de l’objet.
Description de la configuration
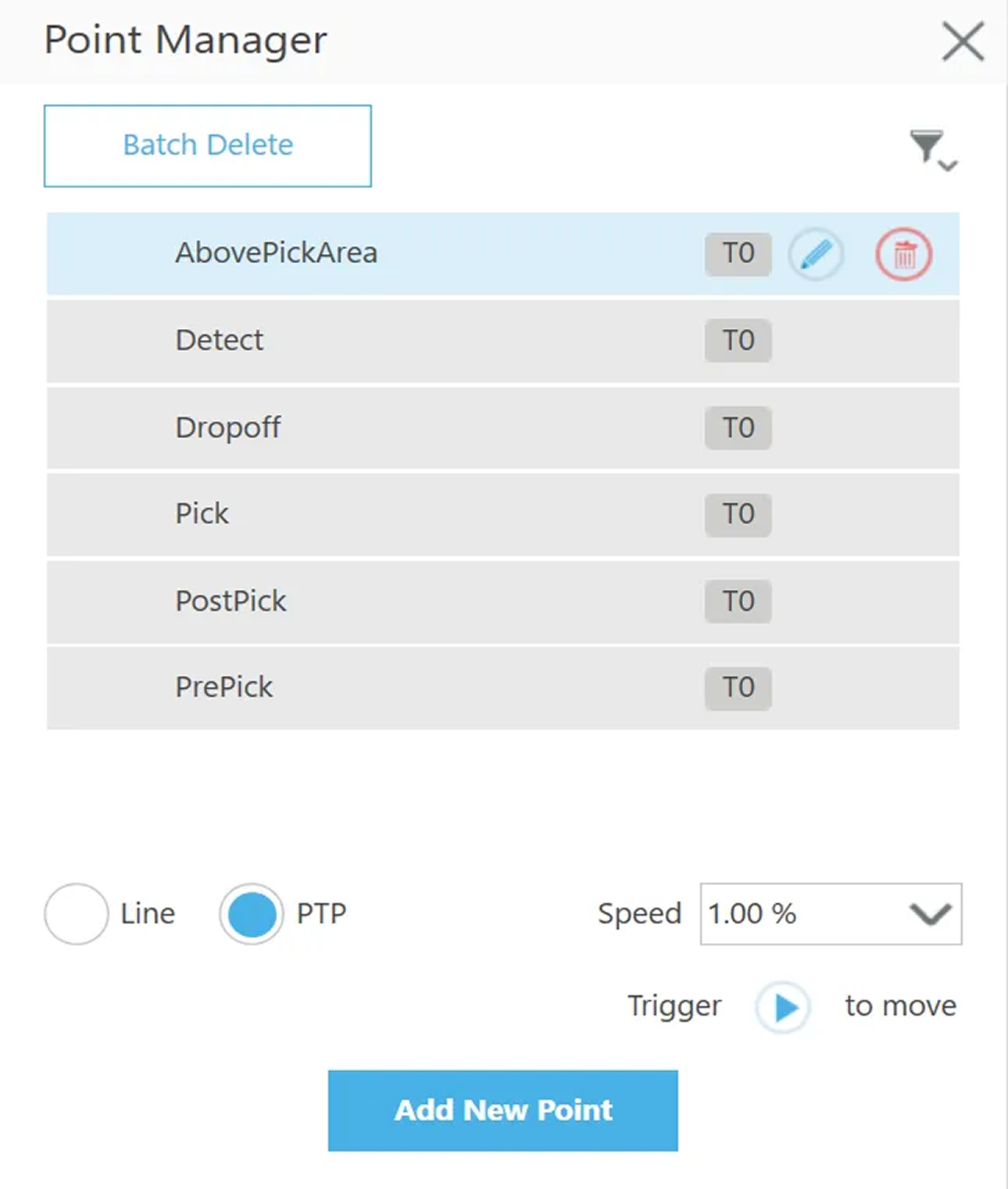
Configurations des points
Le programme fait intervenir un total de six points, dont trois points enseignés et trois points calculés automatiquement.
-
Points enseignés: Points qui doivent être enseignés au préalable.
-
AbovePickArea: Similaire à la position Home; le robot peut atteindre facilement le point Detect et le point Dropoff depuis celle-ci.
-
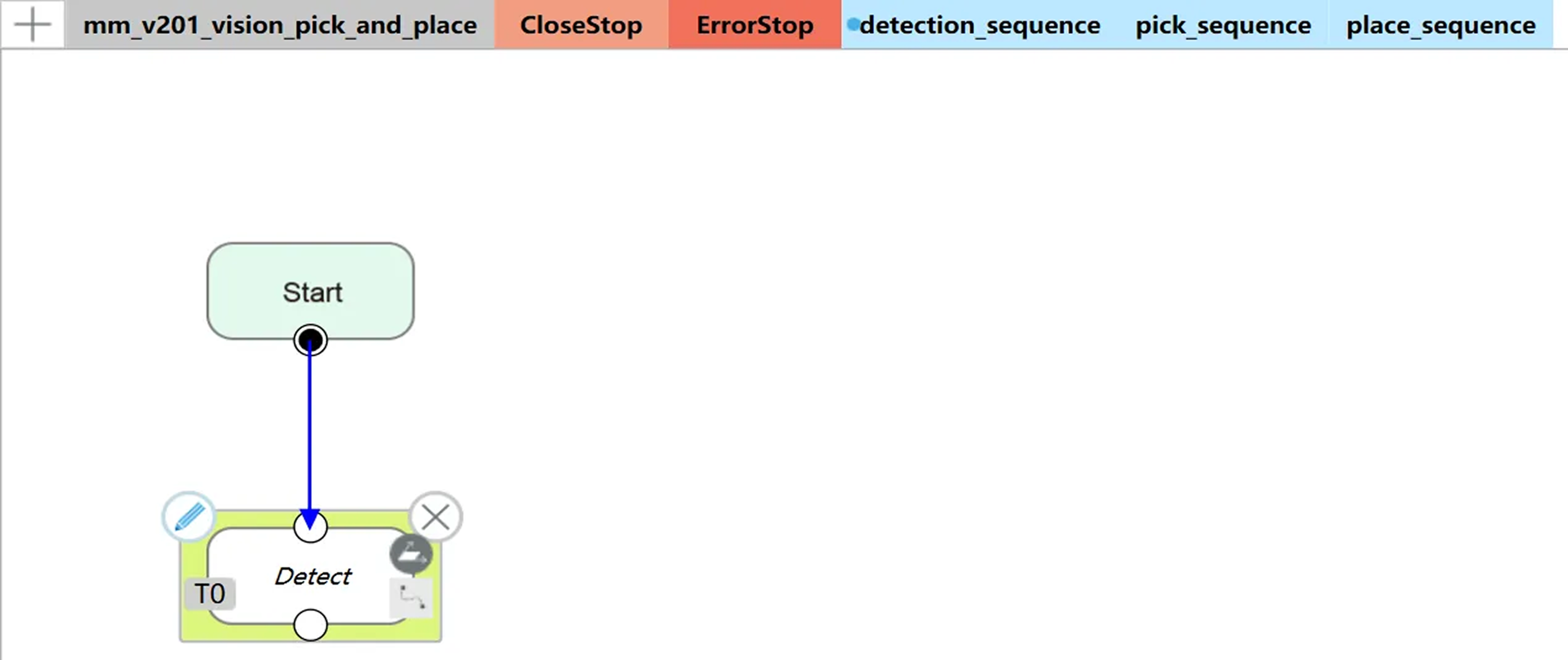
Detect: Le point où la caméra capture des images.
-
Dropoff: Le point où le robot dépose l’objet.
-
-
Points calculés automatiquement: Calculés à partir du résultat de vision renvoyé par Mech-Vision, aucun enseignement préalable n’est requis.
-
Pick: Le point défini en fonction du résultat de vision renvoyé par Mech-Vision.
-
PrePick: Le point obtenu en décalant le point Pick le long de l’axe Z, utilisé pour une approche linéaire avant la saisie.
-
PostPick: Le point obtenu en décalant le point Pick le long de l’axe Z de la base du robot, utilisé pour un retrait linéaire après la saisie.
-
Paramètres de configuration
Composant MM init
Tous les appareils réseau du programme sont générés à l’aide de MM init. Ce composant vous permet de modifier l’Adresse IP et numéro de port de l’IPC.
Composant Run Vision
Vous devez spécifier manuellement les valeurs des paramètres du composant Exécuter Vision. Pour des instructions détaillées, voir Modifier les paramètres du composant.
Description du programme
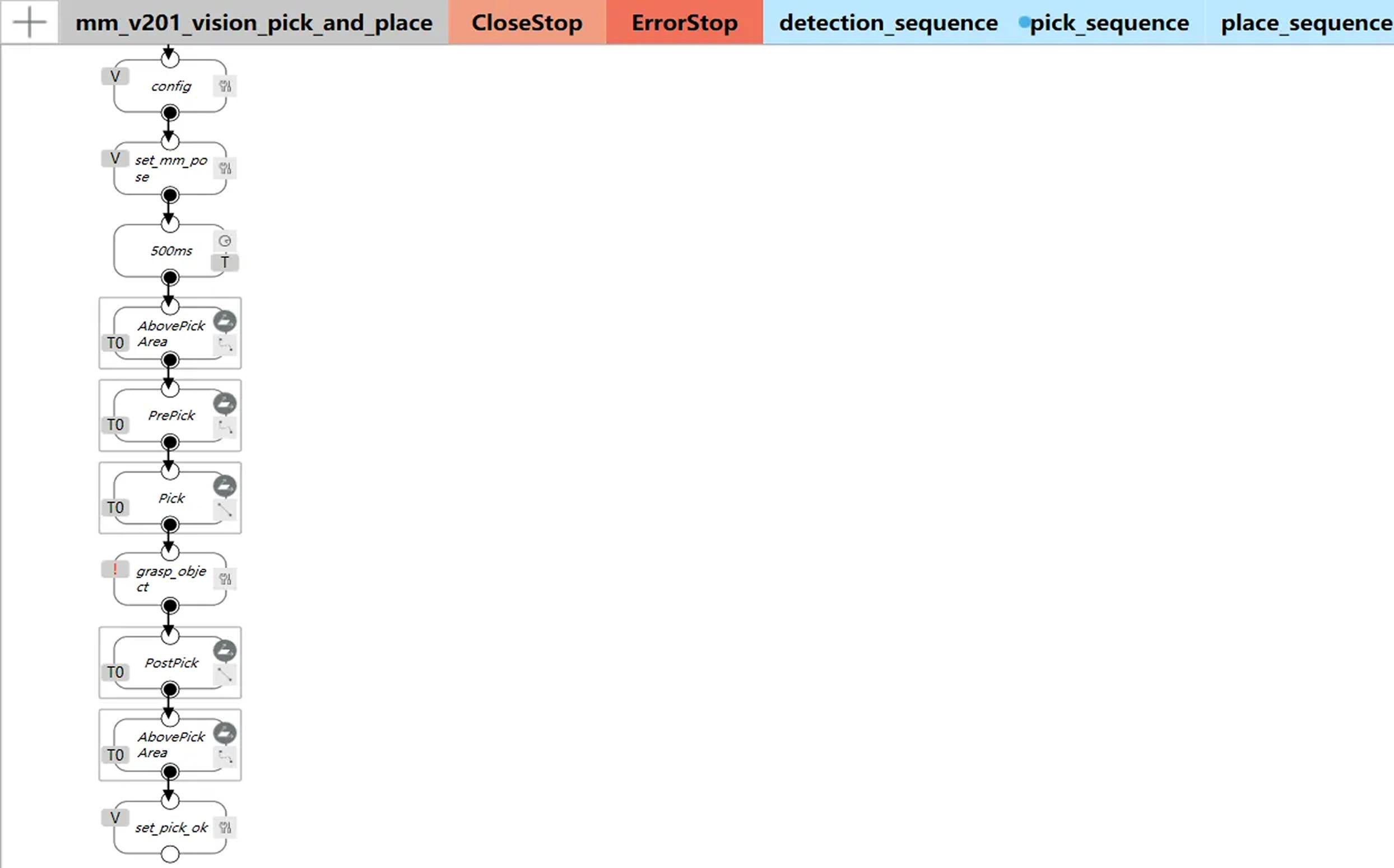
Saisie (pick_sequence)
Le trajet suivi par le robot pendant le processus de saisie: Un point loin de l’objet → Un point proche de l’objet → Point Pick → Un point à l’écart de l’objet → Un point loin de l’objet.
Le nœud grasp_object ne peut pas être exécuté directement. Vous pouvez modifier ici les valeurs des paramètres pour contrôler l’outil afin de saisir.
Par ailleurs, vous pouvez définir dans le nœud config la distance entre le point proche de l’objet et le point Pick.
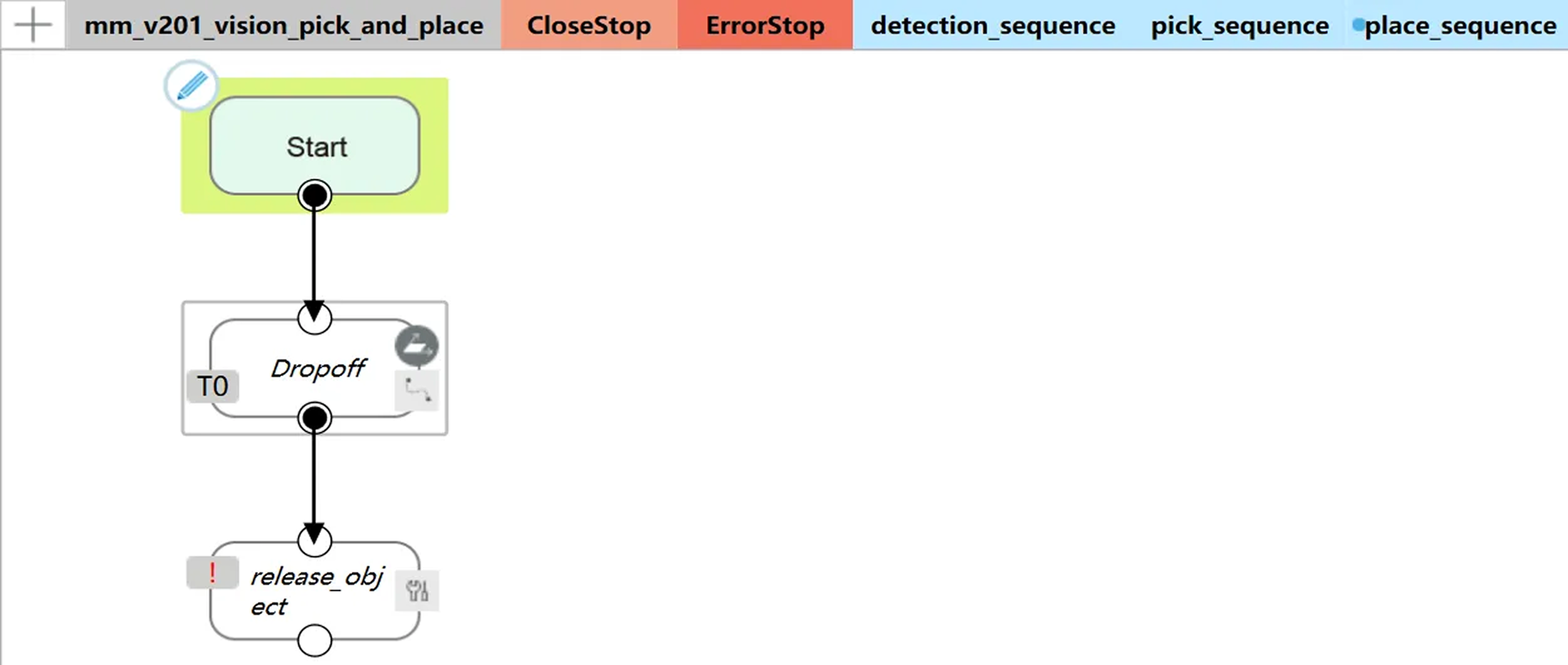
Dépose (place_sequence)
Le nœud release_object ne peut pas être exécuté directement. Vous pouvez modifier ici les valeurs des paramètres pour contrôler l’outil afin de relâcher.
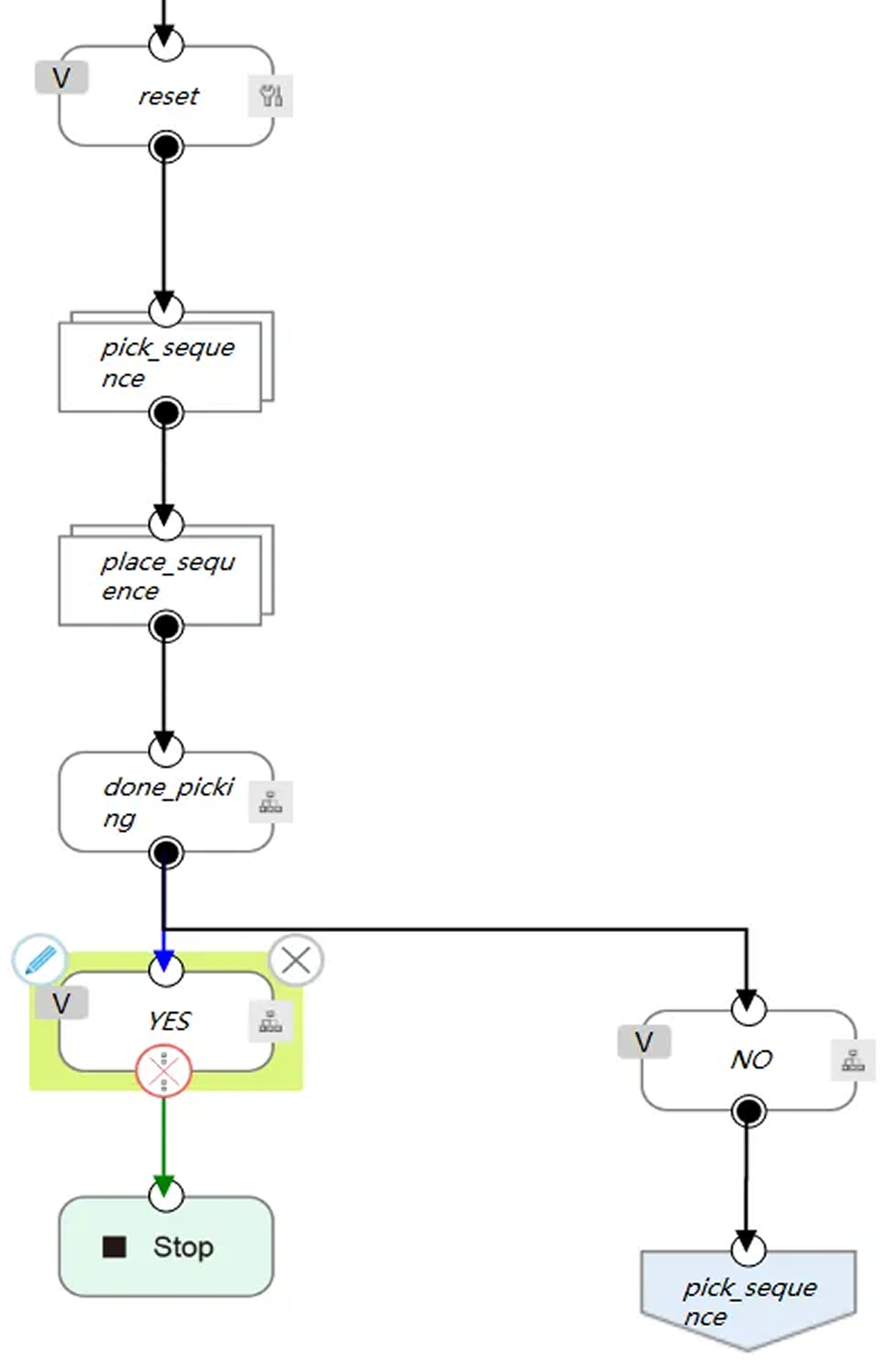
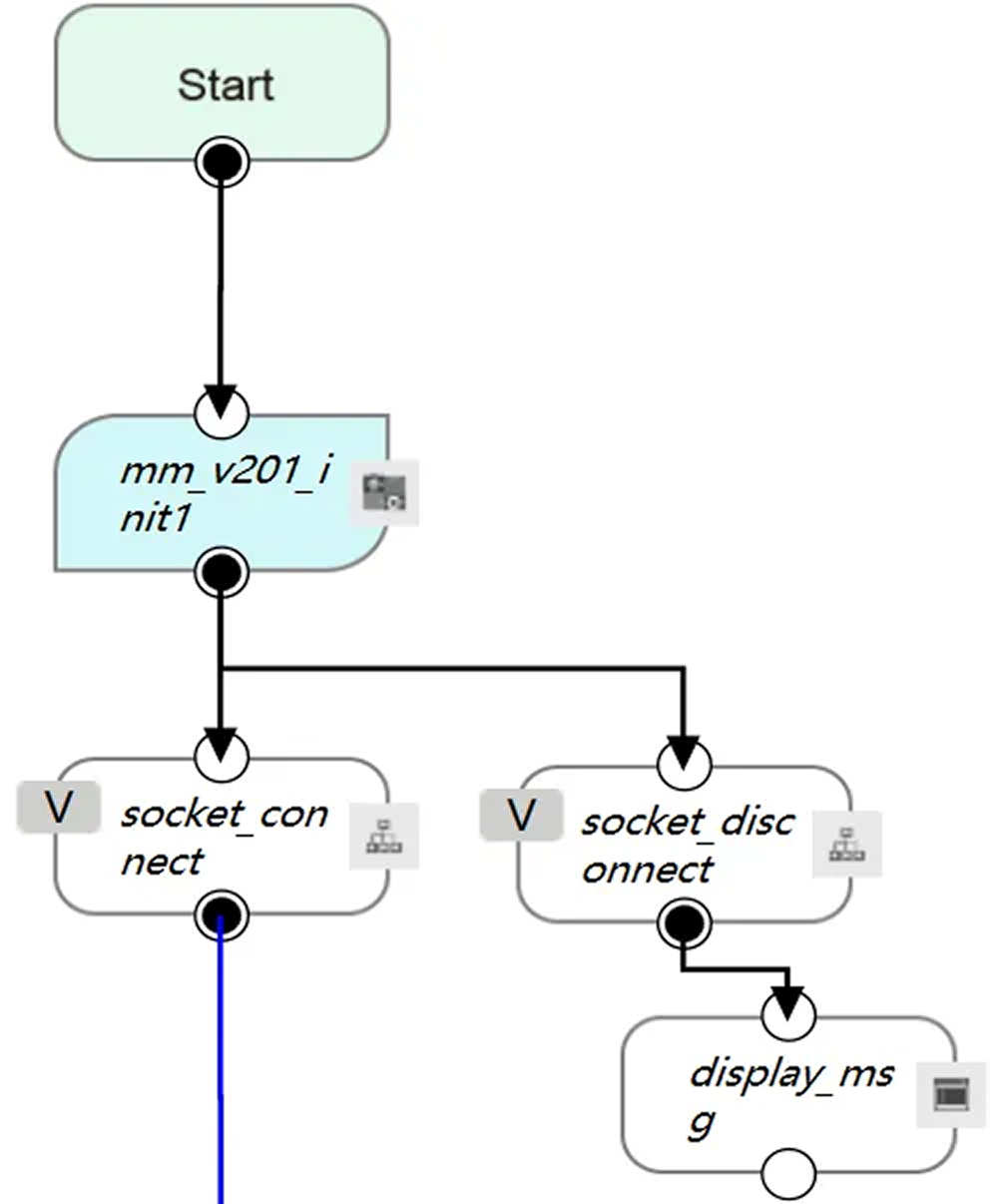
Programme principal (mm_v201_vision_pick_and_place)
-
Dans un premier temps, établissez la communication entre le robot et le système de vision à l’aide de mm_v201_init1. Vous pouvez modifier l’adresse IP et le numéro de port de l’IPC dans mm_v201_init1.
-
Une fois la communication établie, vous pouvez déplacer le robot vers la position de capture d’images à l’aide de detection_sequence.
-
Exécutez le projet Mech-Vision et définissez la recette de paramètres à l’aide de mm_v201_runvis1.
-
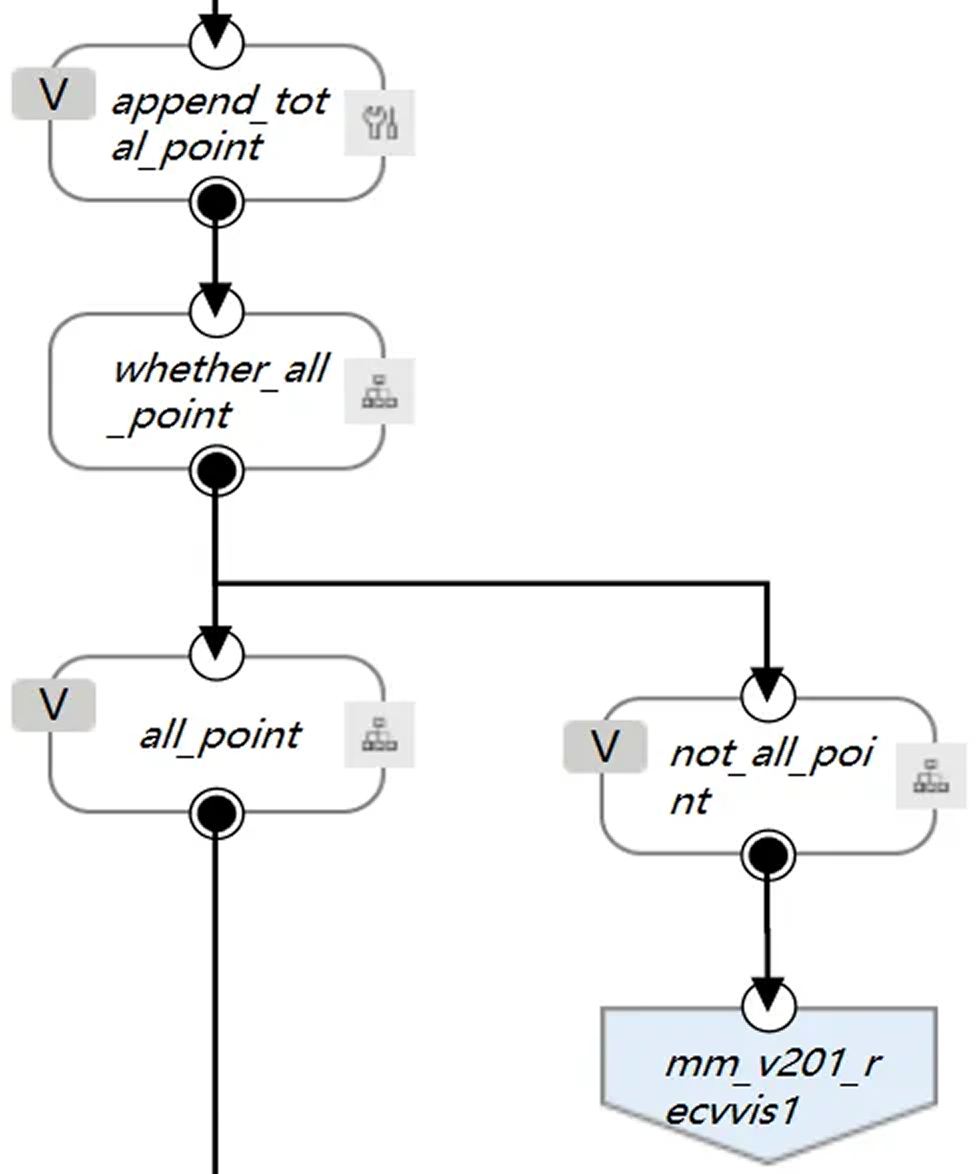
Obtenez le résultat de vision exporté par Mech-Vision à l’aide de mm_v201_recvvis1. mm_v201_recvvis1 possède quatre ports de sortie d’exception. Vous pouvez modifier les paramètres des ports selon vos besoins réels. Par exemple, s’il n’y a pas de nuage de points et que vous souhaitez relancer le projet Mech-Vision, vous pouvez connecter EMPTY_ROI et mm_v201_runvis1.
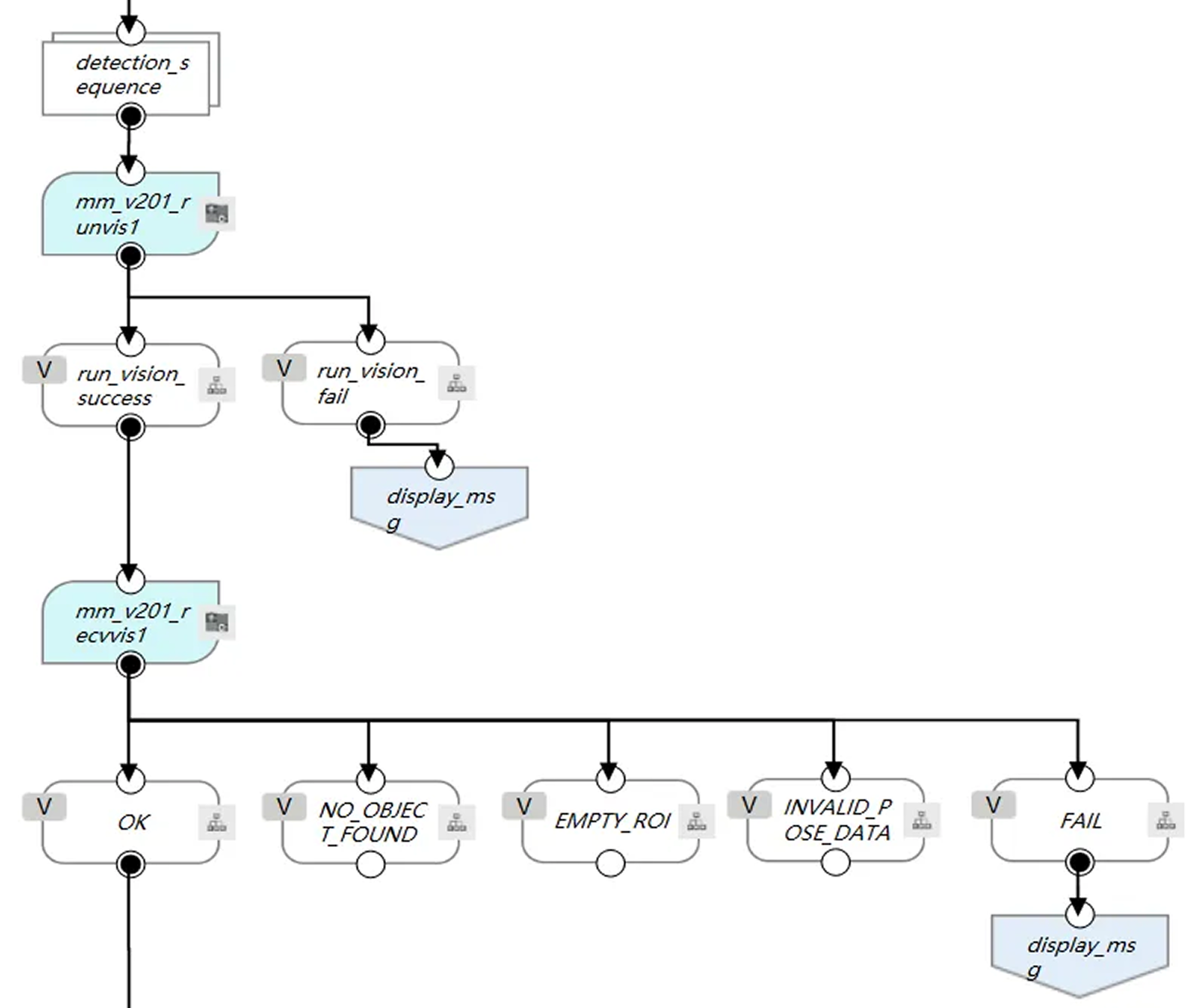
Le résultat de vision reçu de Mech-Vision est stocké dans la variable globale g_mm_socket_recv_array sous forme de chaînes de caractères.
-
Le programme traitera les données dans g_mm_socket_recv_array pour déterminer si tous les points de vision ont été reçus. S’ils ne sont pas tous reçus, le programme sautera vers mm_v201_recvvis1 pour exécution. Une fois terminé, les données de pose des points de vision seront enregistrées dans la variable globale g_mm_total_point.
-
Enfin, le robot se déplace selon les données de pose des points de vision obtenues de Mech-Vision afin d’effectuer la saisie et la dépose.