Exemple de programme 5 : MM_S5_Viz_SetBranch
Introduction du programme
Description |
L’automate démarre le projet Mech-Viz, définit le port de sortie pour l’étape Branch by Msg, puis obtient le chemin planifié à partir du projet Mech-Viz. |
Chemin du fichier |
Vous pouvez trouver le fichier du programme en utilisant le chemin |
Projet |
Projet Mech-Vision et projet Mech-Viz (L’étape Branch by Msg doit être configurée au préalable.) |
Prérequis |
|
| Ce programme d’exemple est fourni à titre de référence uniquement. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette section décrit le programme d’exemple MM_S5_Viz_SetBranch.
| La seule différence entre le programme d’exemple MM_S5_Viz_SetBranch et le programme d’exemple MM_S2_Viz_Basic est que MM_S5_Viz_SetBranch peut définir le port de sortie de l’étape Branch by Msg dans le projet Mech-Viz (Réseau 6). Ainsi, seule la fonctionnalité de définition du port de sortie de l’étape Branch by Msg est décrite dans la partie suivante. Pour des informations sur les parties de MM_S5_Viz_SetBranch qui sont identiques à celles de MM_S2_Viz_Basic, voir Programme d’exemple : MM_S2_Viz_Basic. |
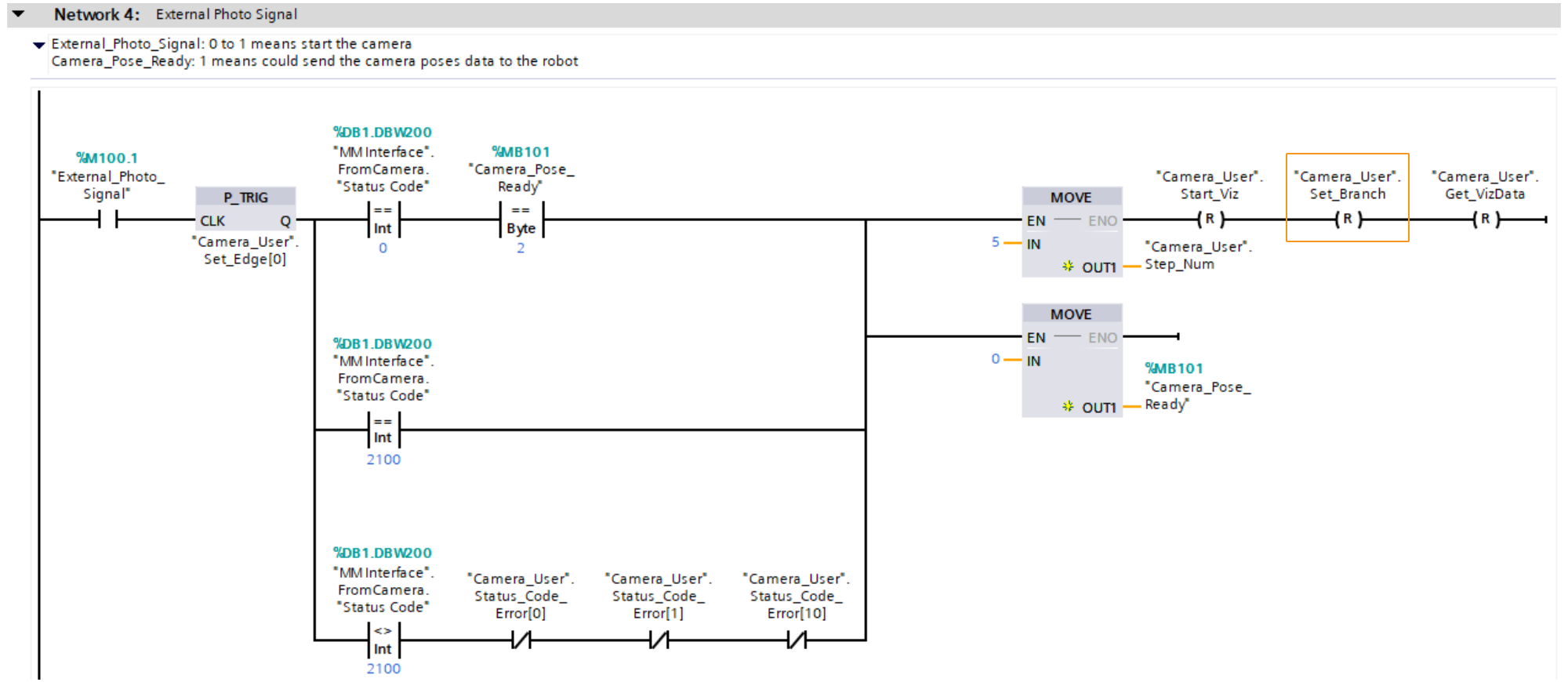
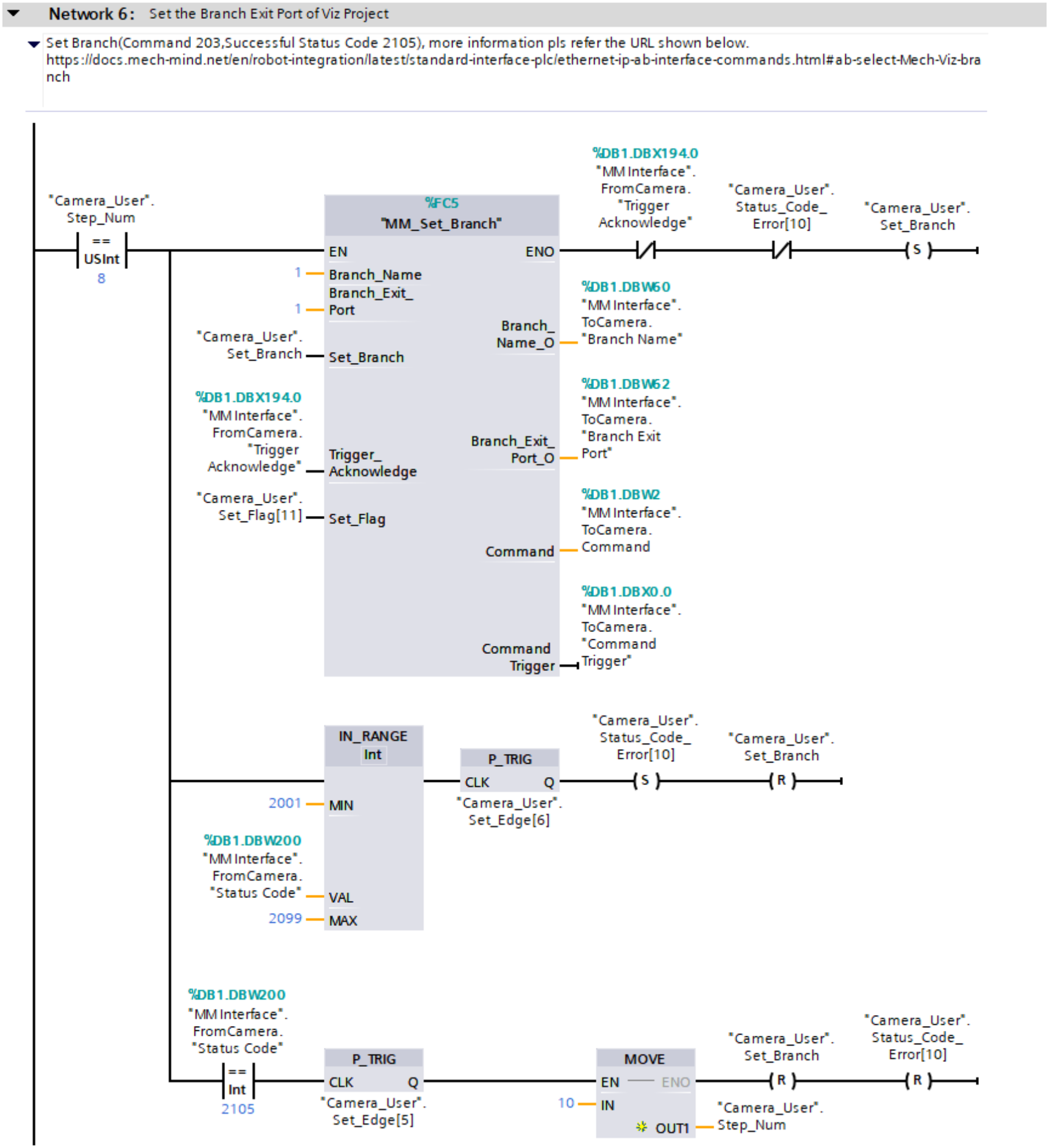
La figure ci-dessous décrit le processus du programme d’exemple ci-dessus. La fonctionnalité de définition du port de sortie de l’étape Branch by Msg dans le projet Mech-Viz du programme ci-dessus est montrée dans la partie indiquée par la ligne rouge dans la figure ci-dessous.
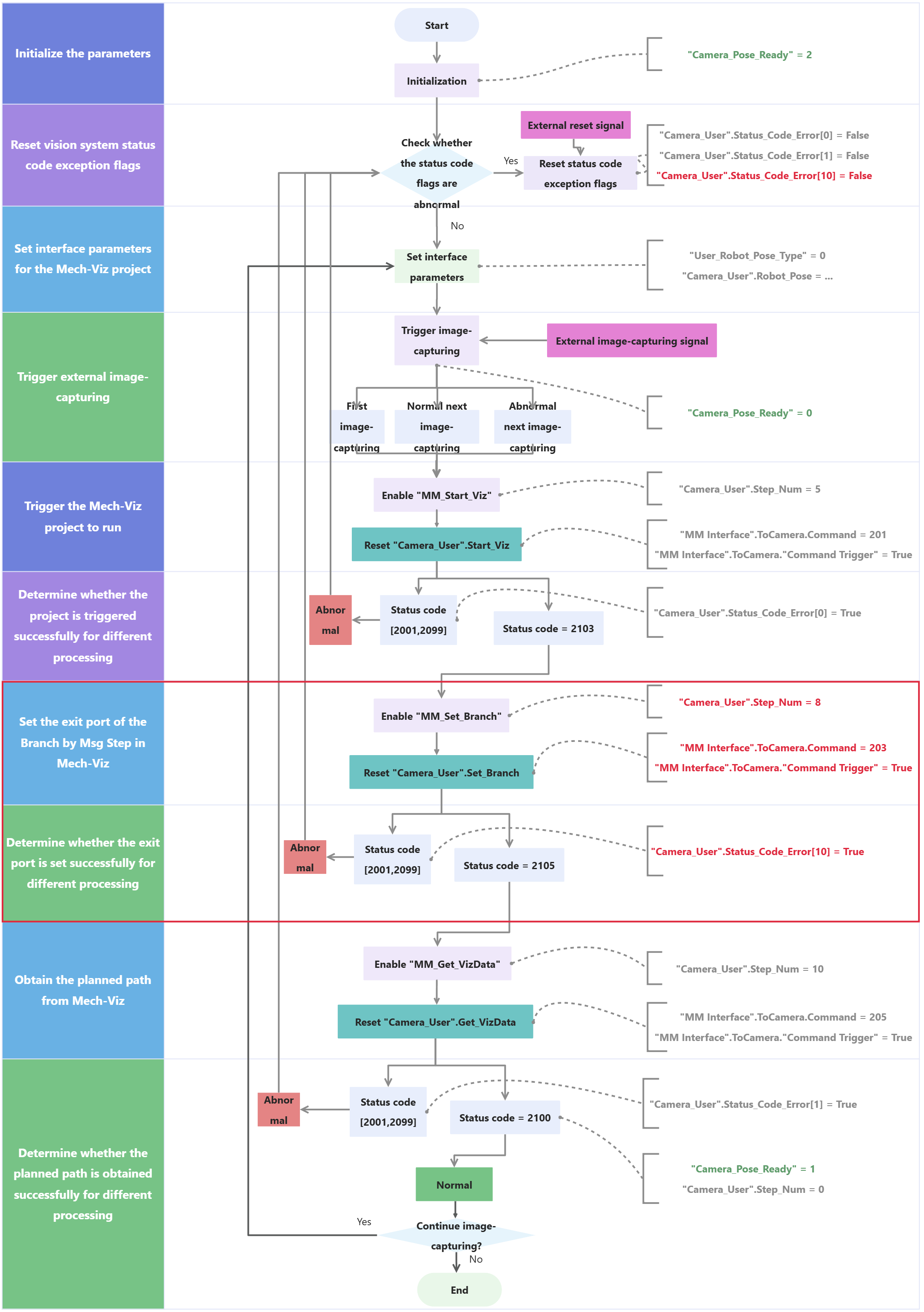
Le tableau ci-dessous décrit le processus de définition du port de sortie de l’étape Branch by Msg dans le projet Mech-Viz.
|
| Fonctionnalité | Description | ||
|---|---|---|---|
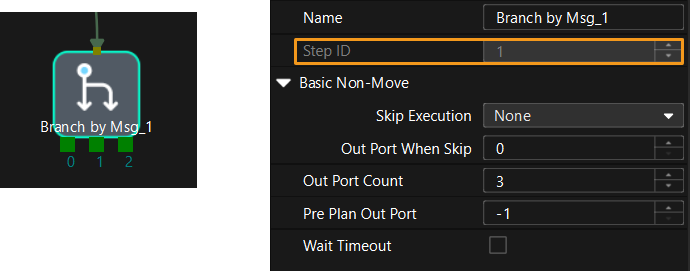
Définir le port de sortie pour l’étape Branch by Msg dans le projet Mech-Viz et déterminer les opérations suivantes en fonction de la réussite ou non de la définition du port de sortie |
Le Réseau 6 indique que si "Camera_User".Step_Num est défini sur 8, les opérations suivantes sont effectuées.
|