Configuration de la communication Master-control (RobotWare 7)
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Contrôleur: OmniCore
-
Version du logiciel système du contrôleur: RobotWare 7.7
-
Option du module de contrôle: 3114-1 Multitasking
Les instructions détaillées sont les suivantes.
-
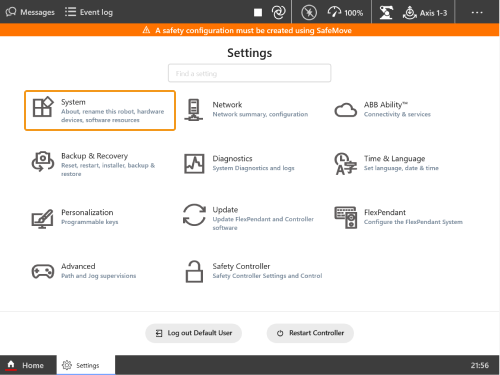
Sur l’interface Accueil du boîtier de programmation, sélectionnez pour vérifier la version de RobotWare.

-
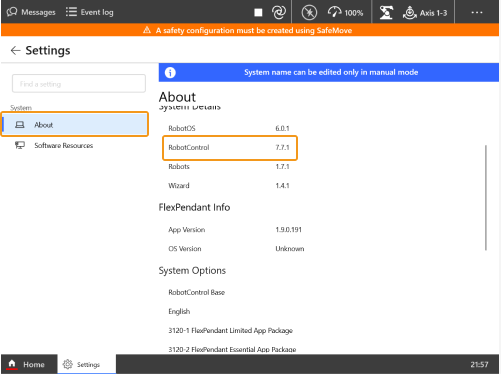
Touchez À propos et vous pouvez confirmer la version de RobotWare, qui doit être supérieure à 7.7, dans Détails du système.
-
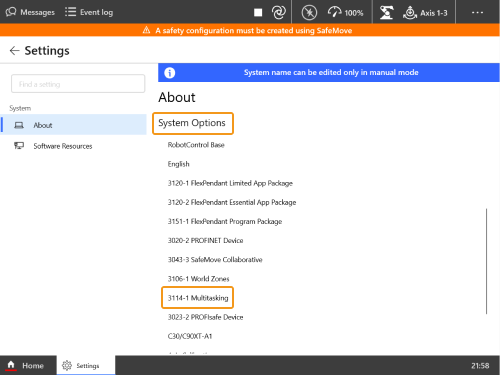
Vérifiez si 3114-1 Multitasking figure dans les Options du système.
Le robot ne peut pas être connecté via Master-control si la version du système ne répond pas à l’exigence.
Configurer la connexion réseau
Connecter le matériel
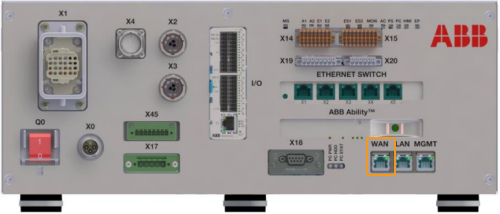
Branchez le câble Ethernet de l’IPC sur le port WAN du contrôleur du robot, comme illustré ci-dessous.
Définir l’adresse IP
| Le câble Ethernet doit être connecté au port WAN. Lors de la configuration de l’adresse IP, veillez à distinguer l’adresse IP du robot sur le port WAN de celle du port LAN. |
-
Touchez
 pour ouvrir le Panneau de contrôle, puis sélectionnez .
pour ouvrir le Panneau de contrôle, puis sélectionnez .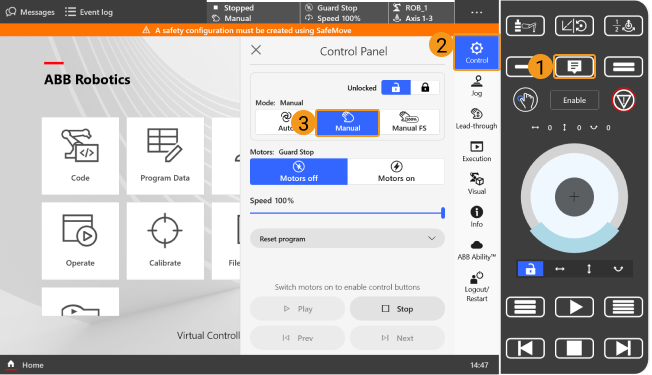
-
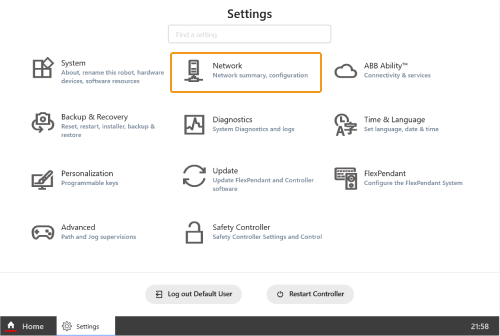
Sur l’interface Accueil du boîtier de programmation, sélectionnez .
-
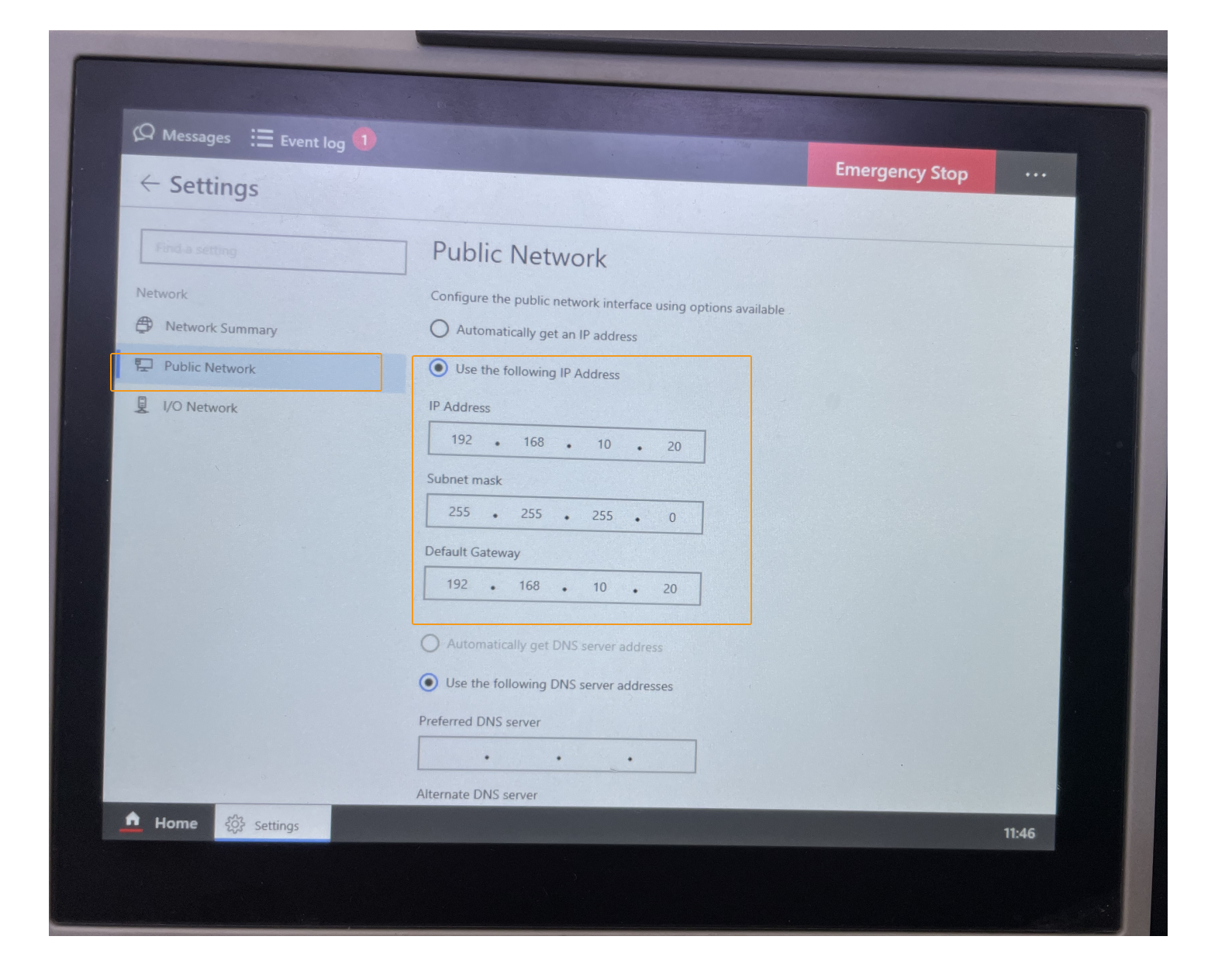
Sélectionnez Utiliser l’adresse IP suivante, puis saisissez l'Adresse IP, le Masque de sous-réseau et la Passerelle par défaut. L’adresse IP du robot doit appartenir au même sous-réseau que celle de l’IPC.
Charger les fichiers de programme sur le robot (Auto)
Après avoir défini des paramètres dans l’outil Robot Program Loader, l’outil charge automatiquement des fichiers sur le robot ABB. Suivez les étapes ci-dessous pour permettre à l’outil de charger automatiquement les fichiers.
| Si le processus de chargement automatique échoue et que vous ne pouvez pas résoudre le problème, passez à Charger les fichiers de programme sur le robot (Manuel). |
-
Touchez
pour ouvrir le Panneau de contrôle, et sélectionnez .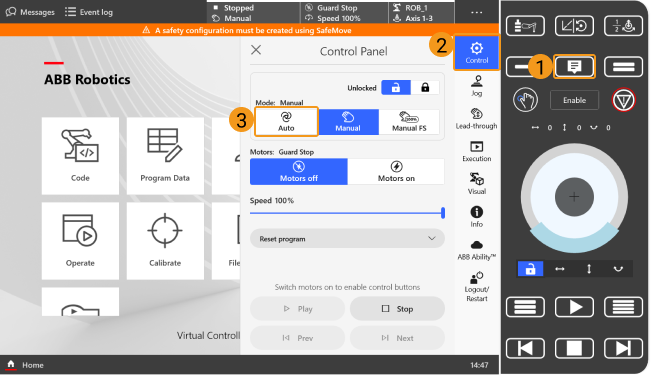
-
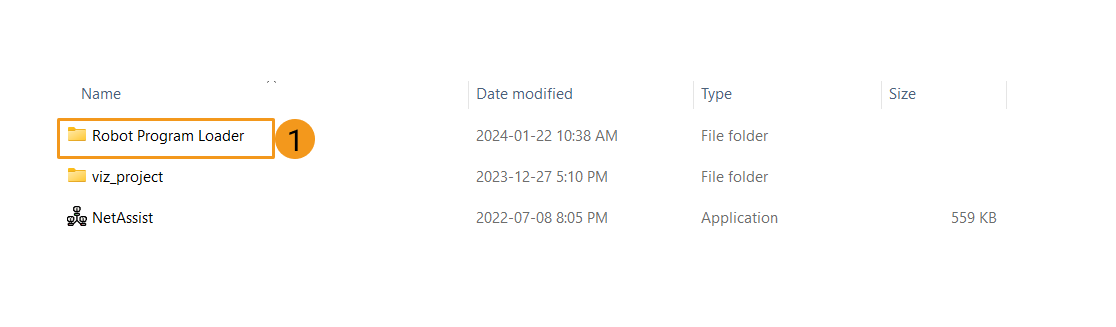
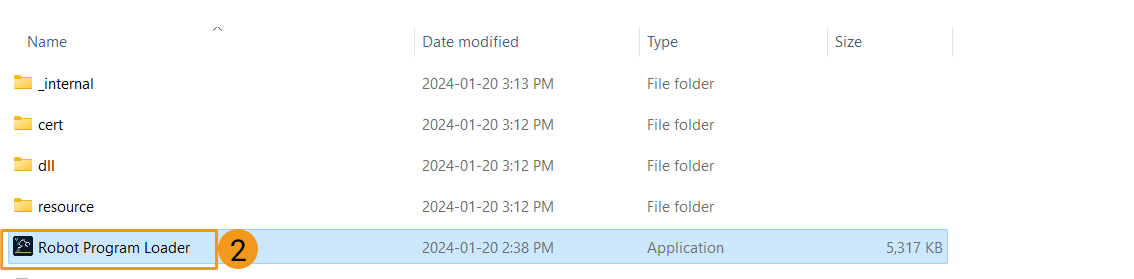
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, allez dans le dossier Robot Program Loader via le chemin Communication Component\tool\Robot Program Loader, puis double-cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur s’affiche.
Pour changer de langue dans Robot Program Loader, sélectionnez une langue différente dans la liste déroulante en haut à droite de l’interface principale et redémarrez Robot Program Loader pour que la nouvelle langue prenne effet. -
Sélectionnez la marque de robot ABB, saisissez l’adresse IP réelle du robot, puis cliquez sur Connexion.
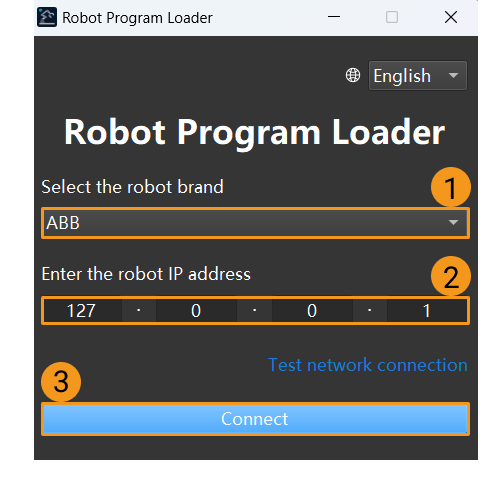
Si la connexion échoue, cliquez sur Tester la connexion réseau dans le coin inférieur droit pour diagnostiquer le problème. -
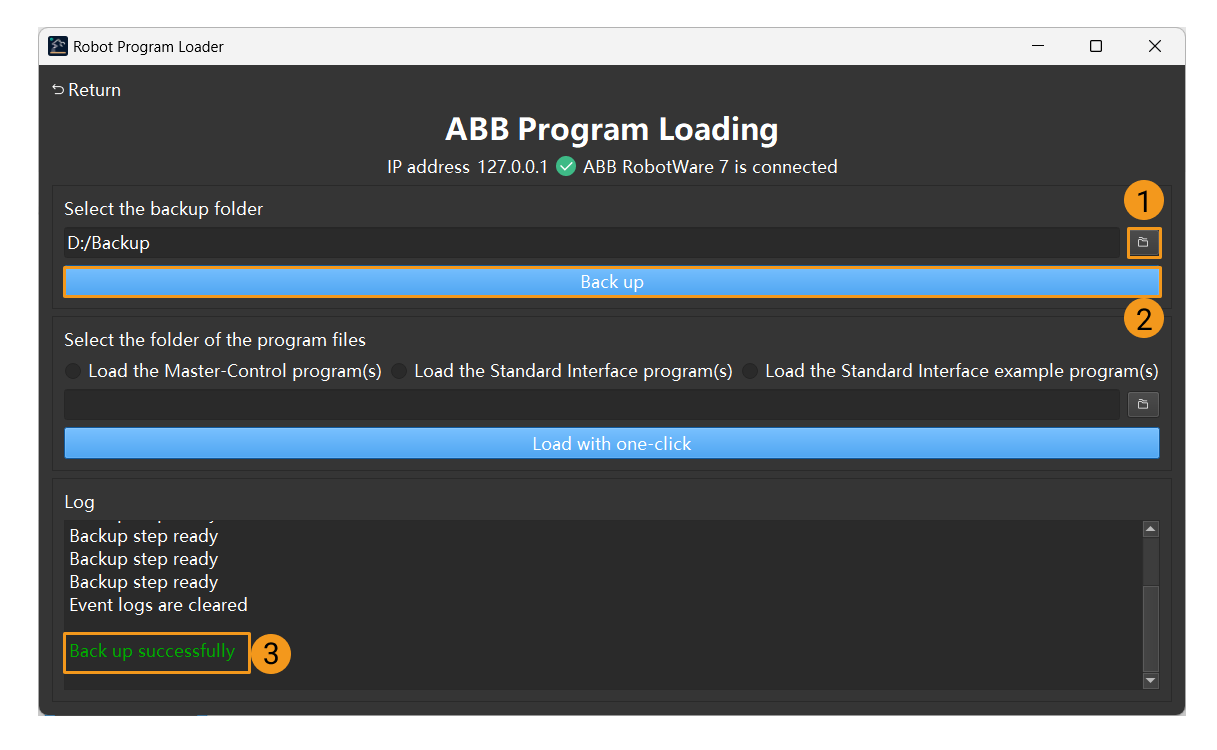
Dans l’interface Chargement de programme ABB, sélectionnez un dossier pour stocker les fichiers de sauvegarde puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi s’affiche dans la section Log.
-
En cas d’erreurs lors du processus de chargement ultérieur, les fichiers peuvent être utilisés pour réinitialiser le système du robot.
-
Si vous avez chargé des programmes Master-control sur le robot, vous ne pourrez les recharger qu’après avoir réinitialisé le système du robot.
-
-
Après la réussite de la sauvegarde, sélectionnez Charger le(s) programme(s) Master-control pour confirmer le dossier qui stocke les fichiers de programme, puis sélectionnez le type de carte E/S du robot. Dans cet exemple, Pas de carte E/S est sélectionné. Votre type de carte peut être différent de celui utilisé dans cet exemple. Définissez le type de carte selon votre scénario réel. Après avoir défini les paramètres ci-dessus, cliquez sur Charger en un clic. Si un message indiquant que les fichiers de programme ont été chargés avec succès apparaît dans la section Log, les fichiers sont chargés sur le robot.
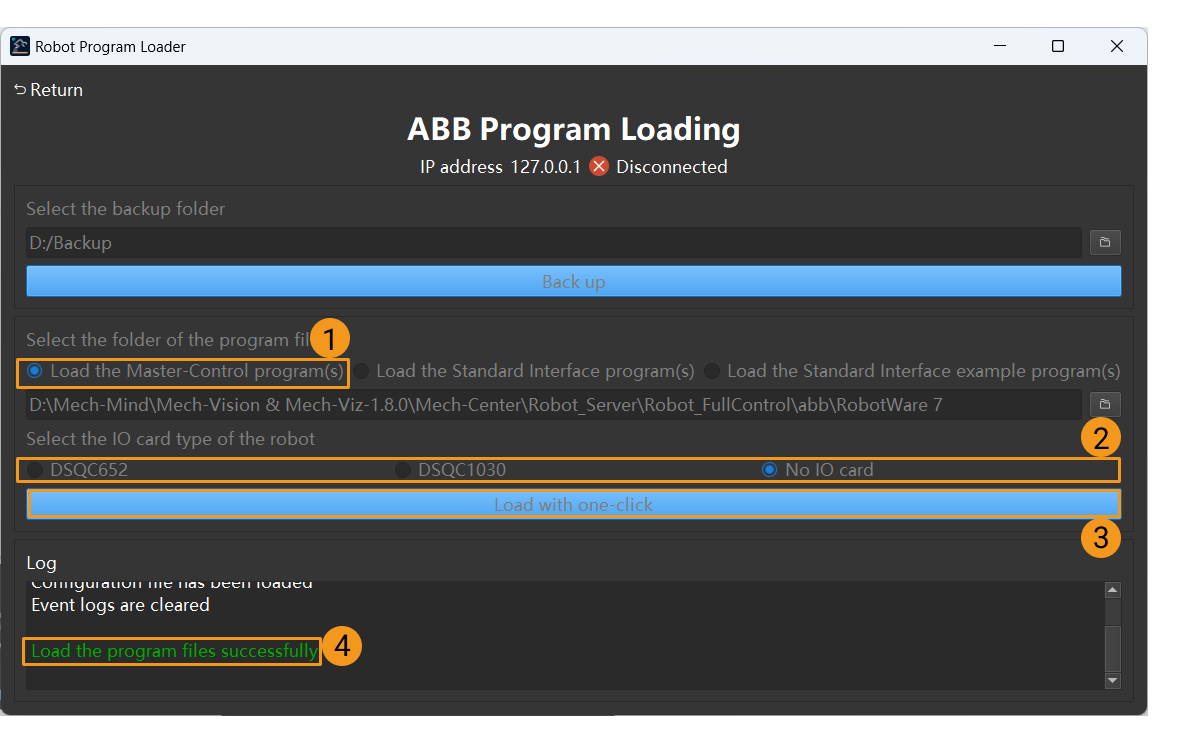
Si le processus de chargement automatique réussit, le contrôleur redémarre. Après la réussite du chargement automatique, passez à Tester la communication Master-control.
Charger les fichiers de programme sur le robot (Manuel)
Si le processus de chargement automatique réussit, ignorez cette section.
|
Préparer les fichiers de programme
Accédez à Communication Component/Robot_Server/Robot_FullControl/abb/RobotWare 7 depuis le répertoire d’installation de Mech-Vision et Mech-Viz. Copiez les dossiers ci-dessous et collez-les sur la clé USB.
| Dossier | Description |
|---|---|
config_robware7 |
Fichier de configuration du robot qui définit les signaux requis par le Master-control, le module chargé automatiquement et les types de tâches |
MM_robware7 |
Le module de programme du robot |
Sauvegarde
Avant d’utiliser le robot, veuillez suivre les instructions de sauvegarde ci-dessous afin de sauvegarder le système, pour pouvoir restaurer le système du robot en cas de mauvaise manipulation.
-
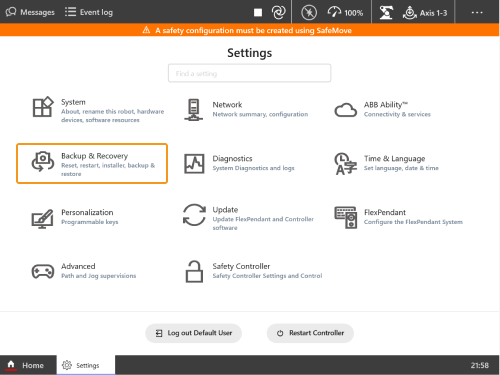
Sélectionnez dans l’interface Accueil.
-
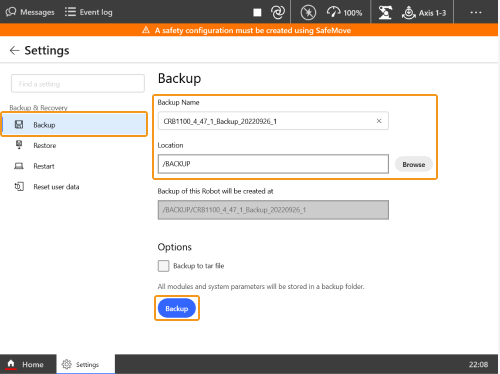
Dans la fenêtre Sauvegarde, modifiez le Nom de la sauvegarde et l’Emplacement, puis touchez Sauvegarder.
-
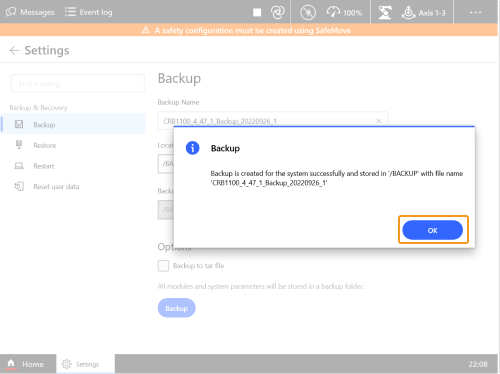
Cliquez sur OK dans la fenêtre contextuelle pour terminer la sauvegarde.
Réinitialisation
|
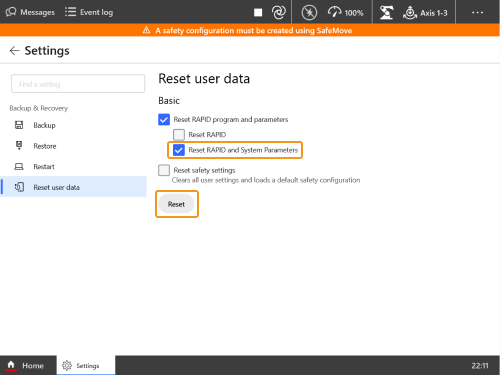
Il existe deux types de réinitialisation : réinitialiser RAPID et réinitialiser le système.
|
Réinitialiser RAPID
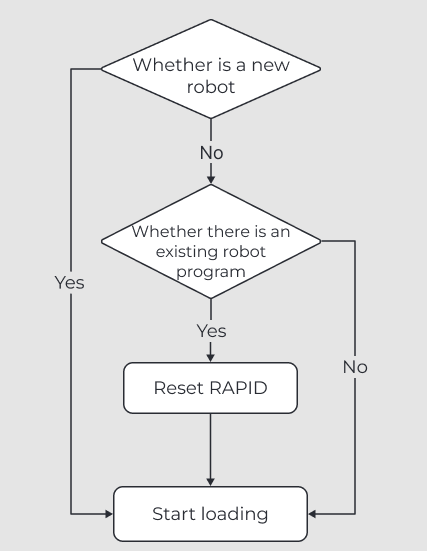
Déterminez si vous devez réinitialiser RAPID en vous basant sur l’organigramme suivant.
-
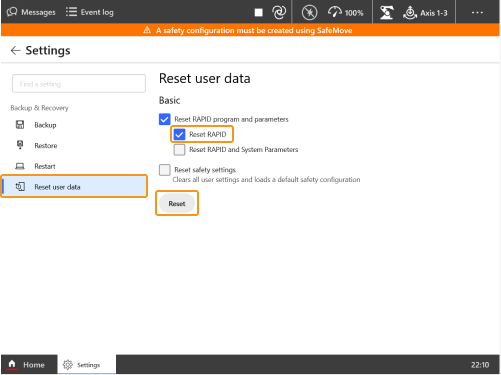
Sélectionnez dans l’interface Accueil.
-
Dans la fenêtre Réinitialiser les données utilisateur, sélectionnez Réinitialiser RAPID, puis touchez Réinitialiser.
-
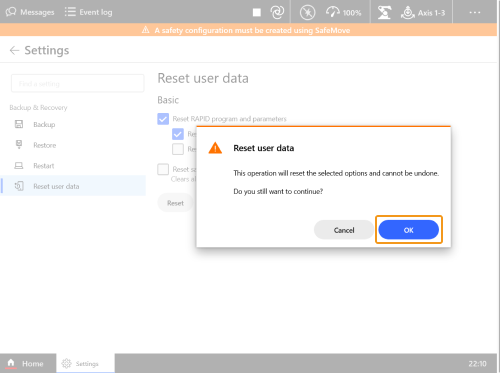
Cliquez sur OK dans la fenêtre contextuelle.
Charger les fichiers sur le robot
Avant de commencer, assurez-vous que le système du robot ne contient pas de programmes créés avec Wizard. Wizard est un outil de programmation graphique qui permet aux utilisateurs de créer des programmes en faisant glisser et déposer des blocs graphiques. Si un programme Wizard existe dans le système du robot, vous devez réinitialiser RAPID. De plus, ne programmez pas avec Wizard après le chargement des fichiers de programme.
-
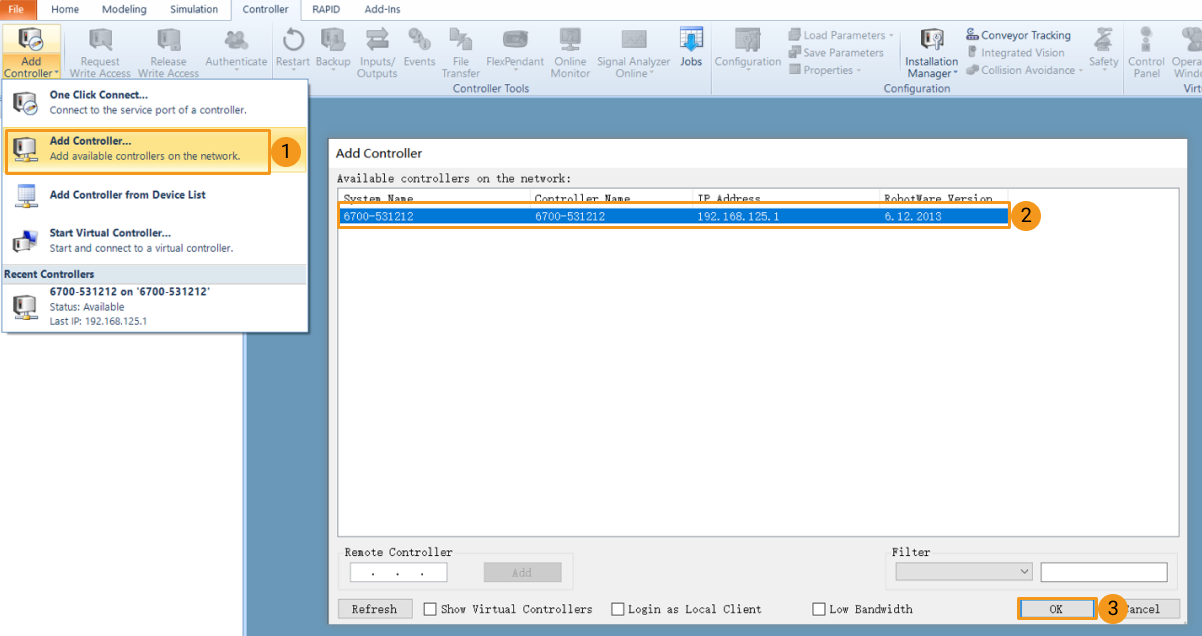
Le câble Ethernet est connecté au port WAN du contrôleur. Pour ajouter le contrôleur, vous pouvez ouvrir RobotStudio, cliquer sur Ajouter un contrôleur, puis sélectionner le contrôleur et cliquer sur OK. Après l’ajout du contrôleur, le port de gestion du contrôleur sera connecté automatiquement.
-
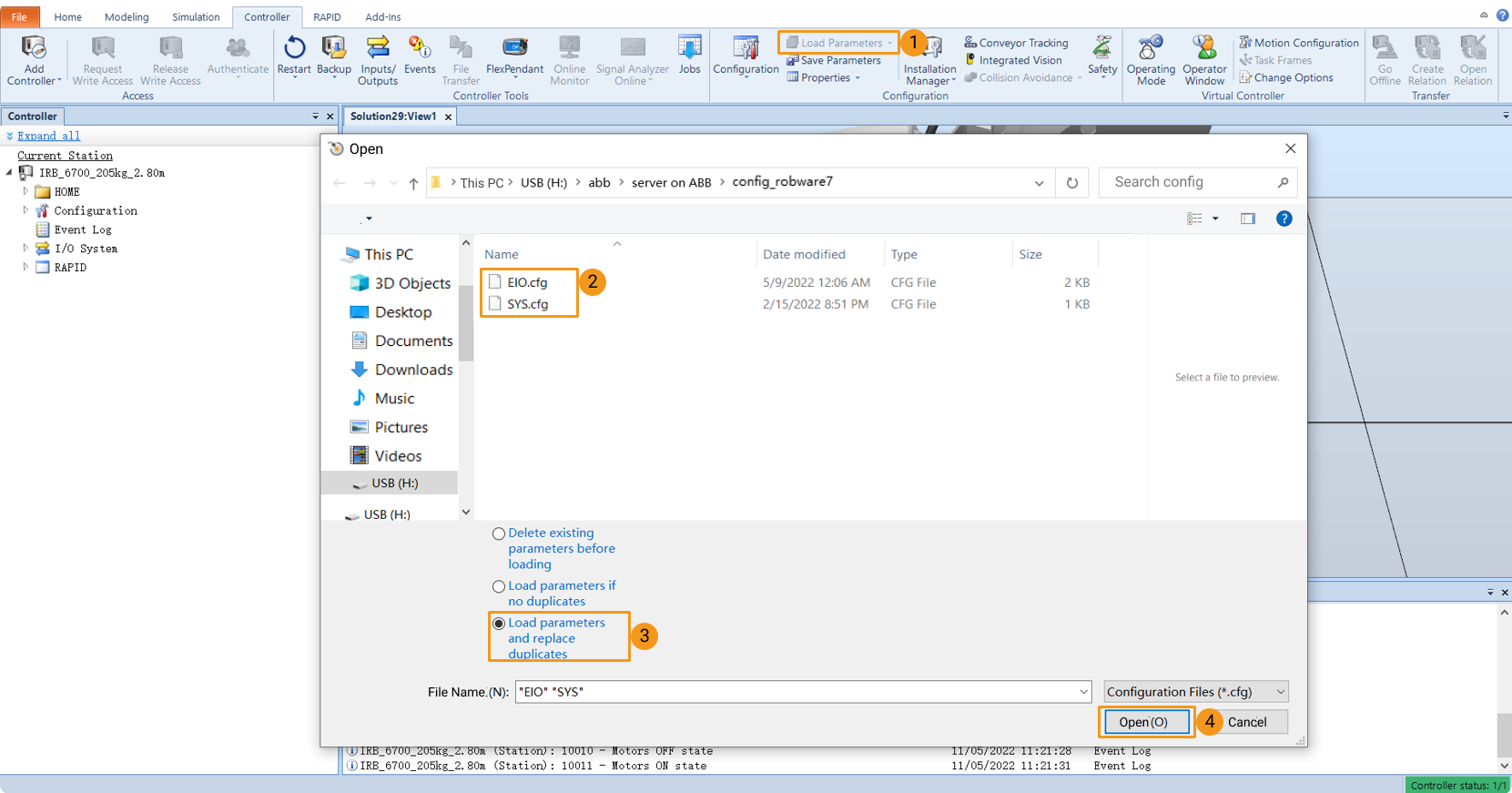
Importez les deux fichiers de configuration dans le dossier config_robware7 comme indiqué ci-dessous.
Si une unité d’E/S DSQC 1030 est utilisée, veuillez sélectionner DSQC1030.cfg et SYS.cfg.
-
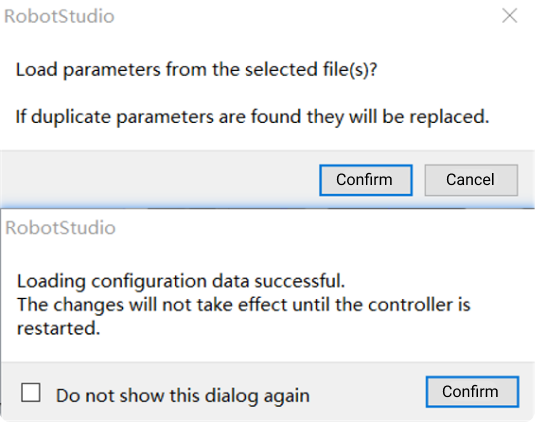
Sélectionnez Confirmer dans les fenêtres contextuelles.
-
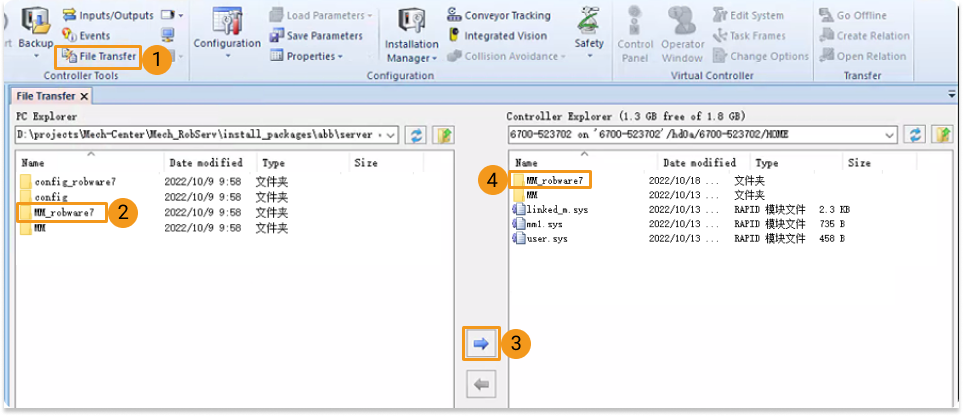
Suivez les étapes indiquées dans la figure ci-dessous pour copier le dossier MM_robware7 entier et le coller dans le répertoire HOME du système du robot.
-
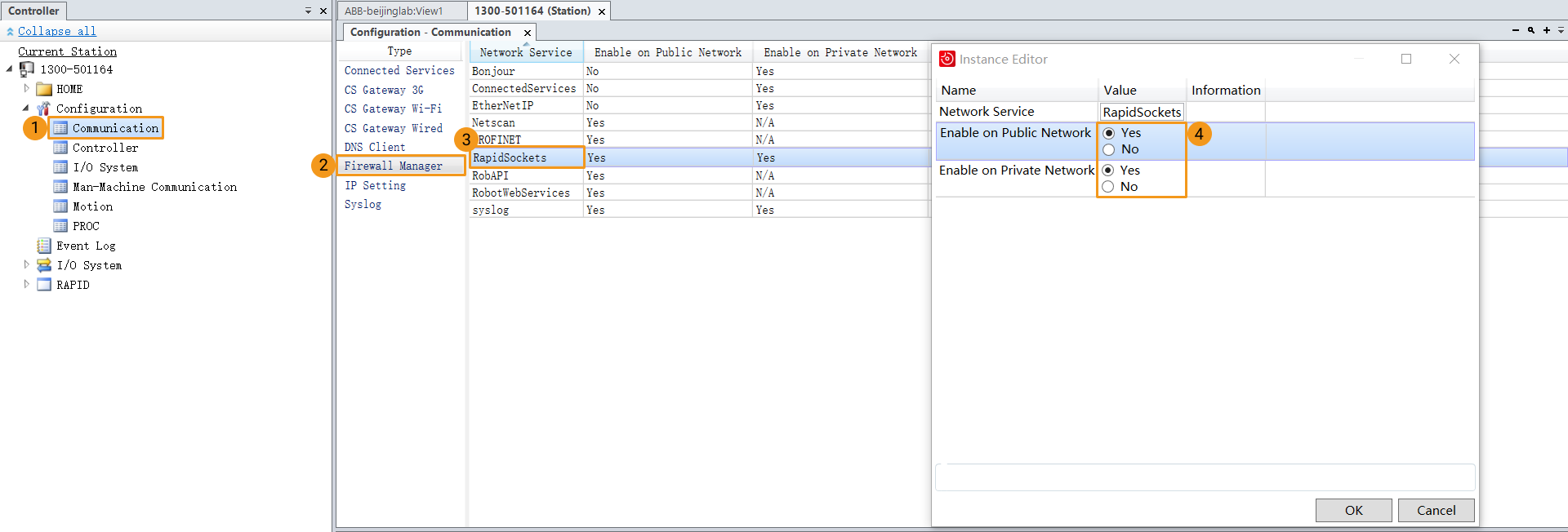
Suivez les étapes indiquées dans la figure ci-dessous pour activer le service réseau RapidSockets.
-
Modifiez le seuil de zone de sécurité (en mm) dans le programme safe_area.mod en fonction de l’espace de travail réel sur site du robot.
-
Cliquez sur Redémarrer pour terminer le chargement des fichiers de programme.

Tester la communication Master-control
Veuillez vous assurer que:
-
Le système du robot ne contient pas de programme Main. Si un programme Main existe déjà dans le système du robot, modifiez le nom du programme.
-
La fonction StopMove ne possède pas la propriété Quick.
Réinitialiser le pointeur de programme
-
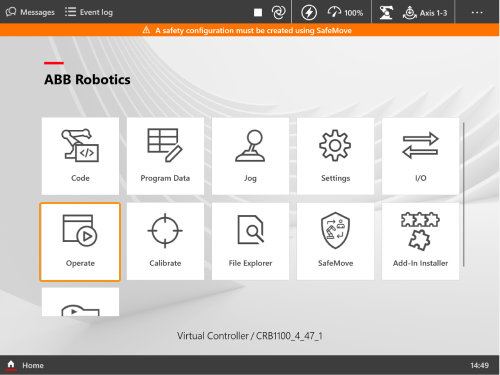
Dans l’interface Accueil, touchez Exploiter.
-
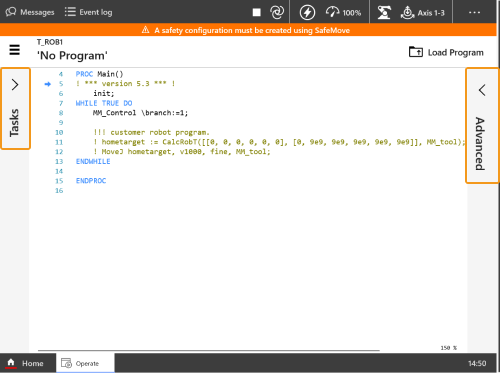
Touchez Tâches à gauche et la liste des tâches s’affichera. Touchez Avancé à droite et les paramètres avancés apparaîtront.
-
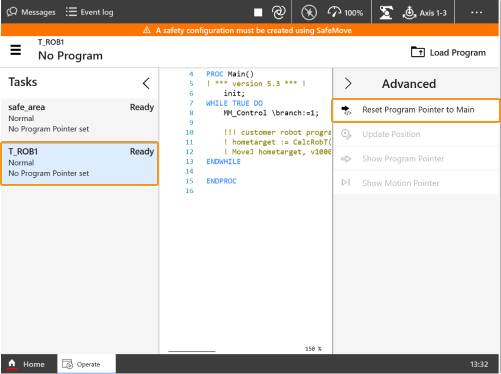
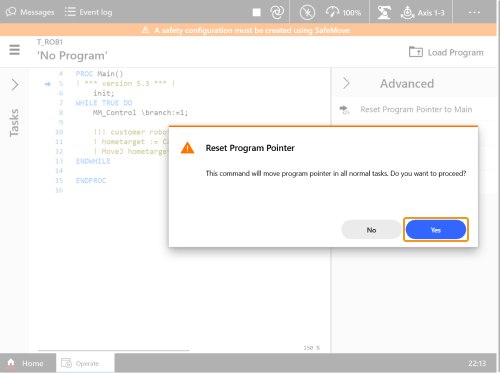
Dans la liste des tâches, sélectionnez T_ROB1, puis sélectionnez Réinitialiser le pointeur de programme vers Main.
-
Sélectionnez Oui dans la fenêtre contextuelle.
Exécuter le programme
-
Touchez
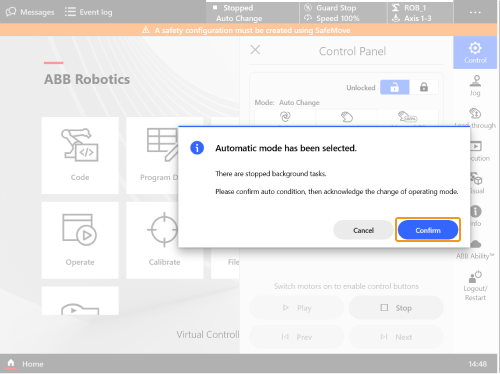
pour ouvrir le Panneau de contrôle, et sélectionnez .
-
Sélectionnez Confirmer dans la fenêtre contextuelle.
-
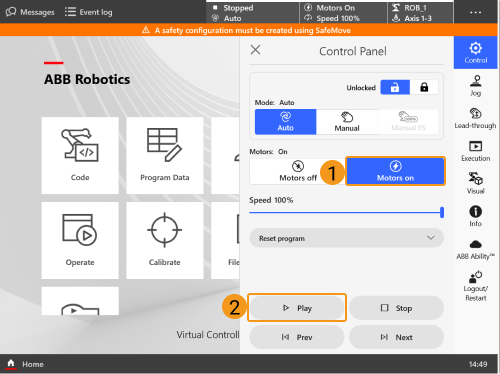
Sélectionnez pour exécuter le programme.
-
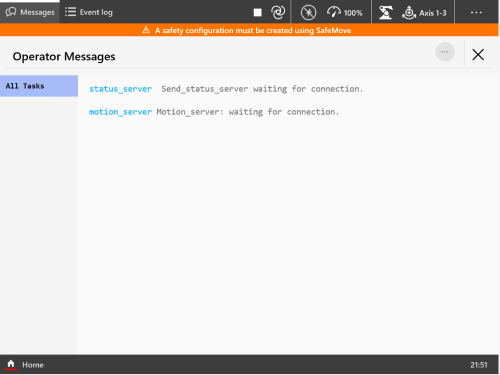
Touchez Messages dans le coin supérieur gauche pour afficher les messages opérateur. Si des messages comme ci-dessous apparaissent, le programme a été chargé avec succès côté robot.
Créer un projet Mech-Viz
-
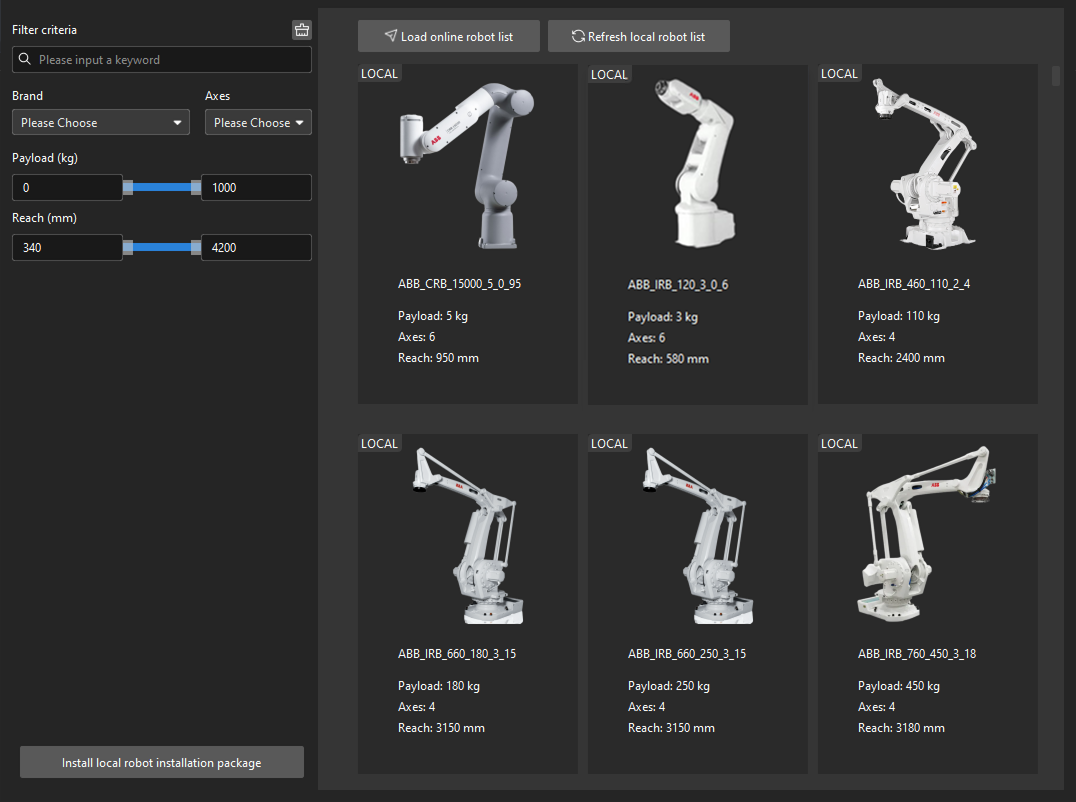
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
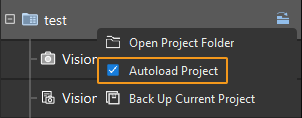
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
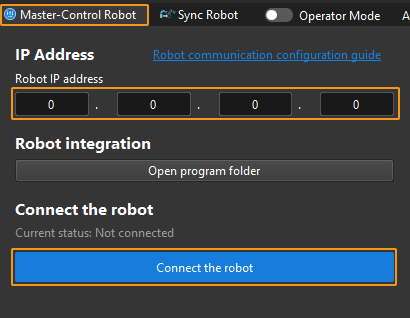
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
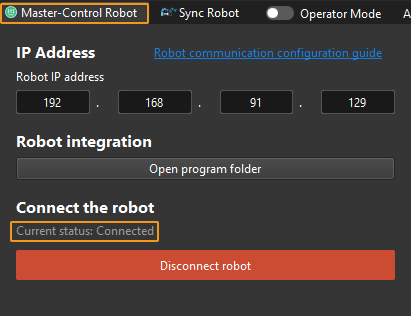
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
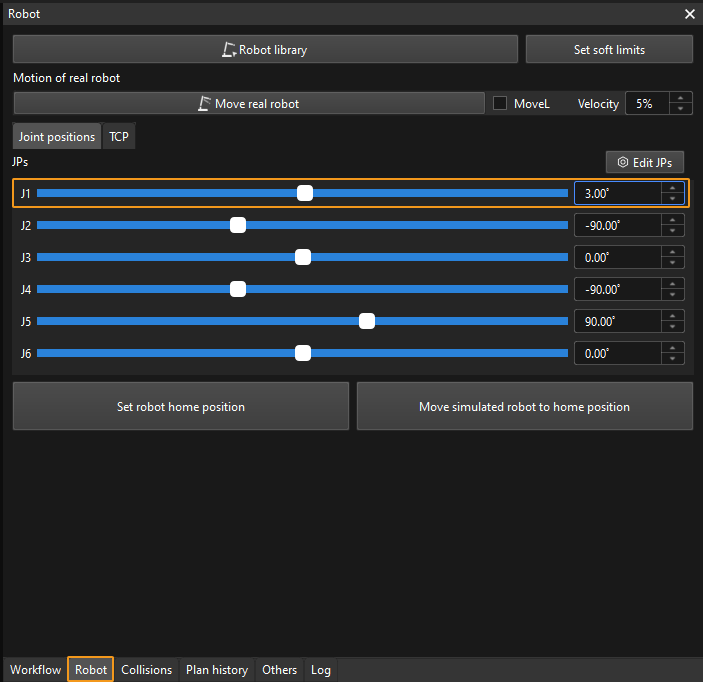
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement ! 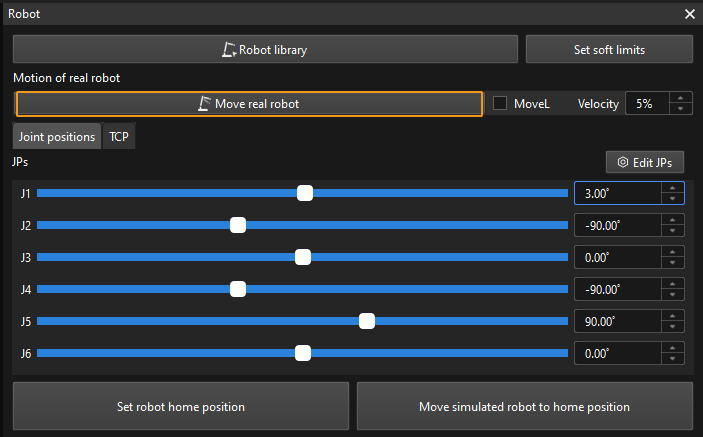
Dépannage
Si le programme a été chargé mais que la connexion au robot échoue, veuillez vérifier si les exigences suivantes sont satisfaites.
-
Côté IPC:
-
Le pare-feu est désactivé.
-
L’IPC peut envoyer un ping à l’adresse IP du robot depuis l’invite de commandes.
-
Les logiciels antivirus n’affectent pas la connexion.
-
Les deux ports réseau de l’IPC appartiennent à des sous-réseaux différents.
-
Si l’IPC est connecté via un routeur, les autres câbles réseau n’affectent pas la connexion.
-
-
Côté robot:
-
Le câble Ethernet est correctement connecté au port WAN du contrôleur.
-
La bonne adresse IP du robot est définie. Veuillez vous assurer que c’est l’adresse IP du port WAN, et non celle d’autres ports, qui est modifiée.
-
Le programme est exécuté côté robot.
-