Commandes d’interface FANUC CRX
Mech-System SocketInit
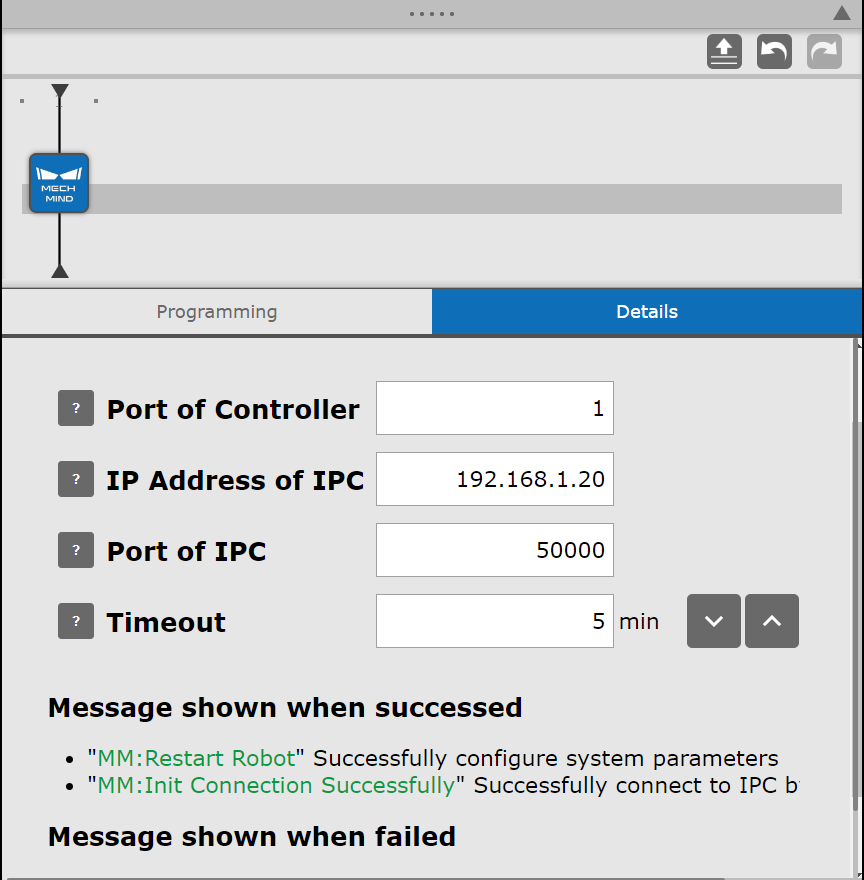
Cette commande sert à définir l’adresse IP de l’IPC, le numéro de port de l’IPC, et le temps d’attente pour la communication TCP/IP.
Paramètres
| Paramètre | Description |
|---|---|
Port du contrôleur |
L’ID du port Ethernet du contrôleur utilisé pour communiquer avec l’IPC |
Adresse IP de l’IPC |
L’adresse IP de l’IPC |
Port de l’IPC |
Le numéro de port de l’IPC configuré dans Mech-Vision |
Délai d’expiration |
Temps d’attente en minutes avant d’arrêter la tentative de connexion |
| Vous n’avez besoin de configurer les paramètres de communication qu’une seule fois si l’environnement réseau et les adresses IP des deux côtés restent inchangés. |
Mech-Eye Calibration
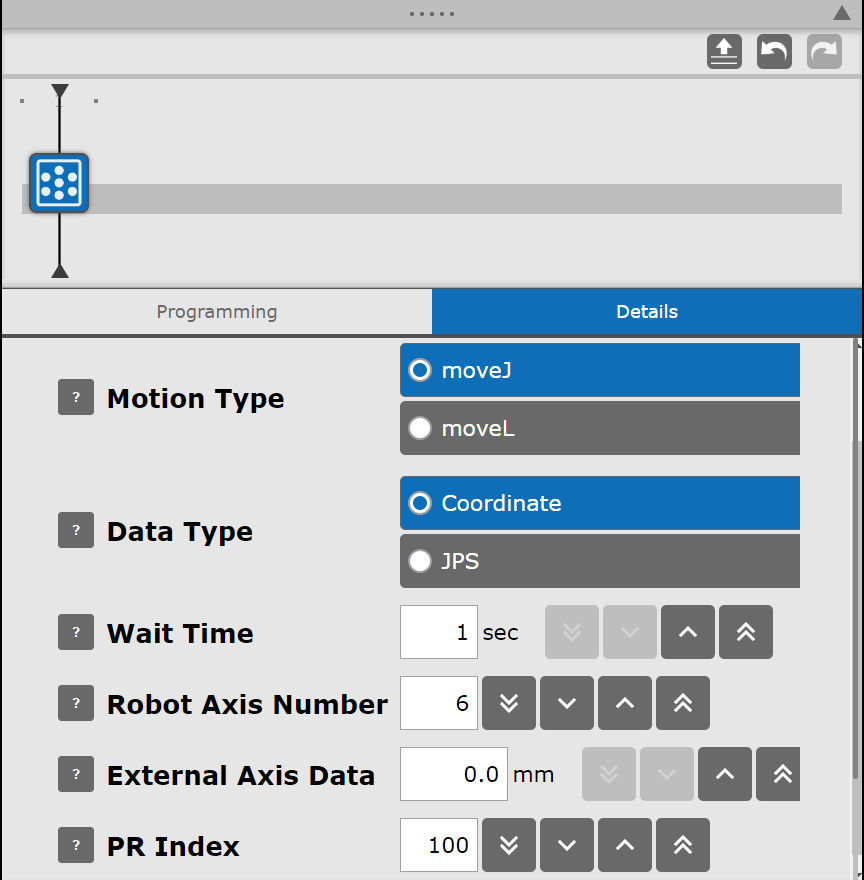
Cette commande est utilisée pour l’étalonnage des paramètres extrinsèques de la caméra. Elle automatise le processus d’étalonnage en conjonction avec la fonction d’étalonnage de la caméra dans Mech-Vision.
Paramètres
| Paramètre | Description |
|---|---|
Type de mouvement |
Le type de mouvement du robot (MoveJ ou MoveL) pendant le processus d’étalonnage automatique |
Type de données |
Le type de pose (Coordonnées ou JPS) envoyé par le robot |
Temps d’attente |
Le temps pendant lequel le robot attend pour éviter les vibrations après s’être déplacé vers le point d’étalonnage ; la valeur recommandée est 1–5 (s) |
Nombre d’axes du robot |
Le nombre d’axes du robot ; la valeur par défaut est 6 ; définissez la valeur à 7 s’il existe un 7e axe externe |
Données d’axe externe |
Les données de position du 7e axe externe pendant l’étalonnage (Optionnel ; entrez 0 lorsqu’il n’y a pas d’axe externe) |
Index PR |
L’index du Position Register où est stocké le point de départ de l’étalonnage |
Mech-Vision Trigger
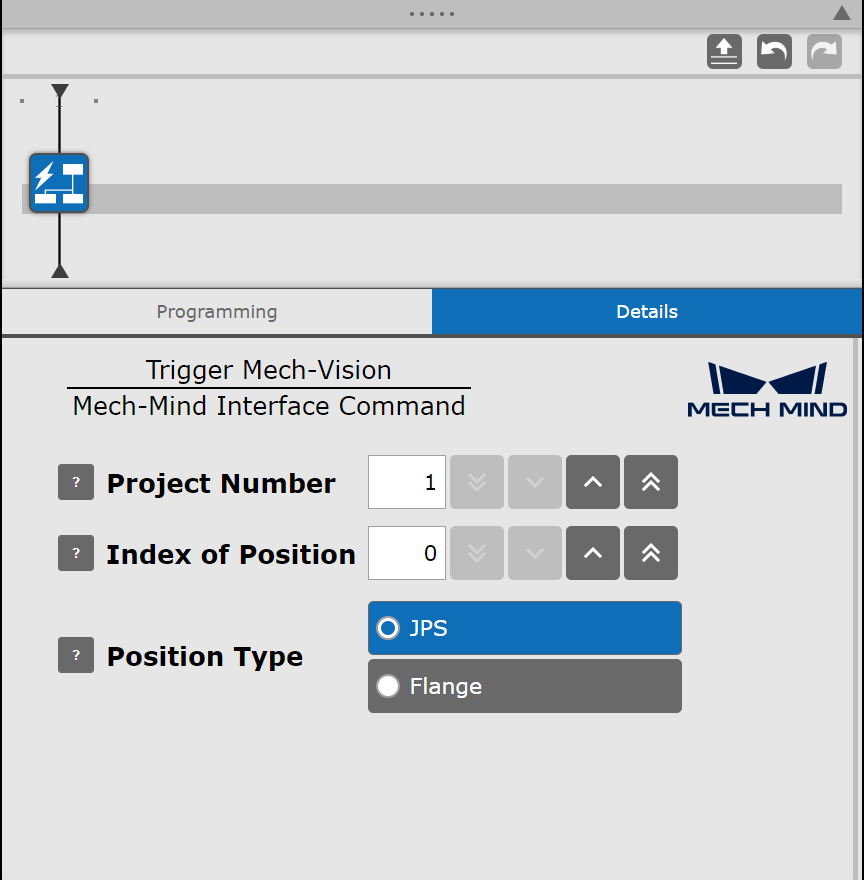
Cette commande déclenche l’exécution du projet Mech-Vision.
Paramètres
| Paramètre | Description | ||
|---|---|---|---|
Numéro de projet |
L’ID du projet Mech-Vision à déclencher ; vous pouvez vérifier l’ID du projet avant le nom du projet dans le panneau Liste de projets de Mech-Vision |
||
Indice de position |
Le nombre de points de vision que vous attendez de la part de Mech-Vision. 0 : Envoie tous les points de vision, jusqu’à 20 points de vision.
|
||
Type de position |
JPS : Envoie les positions articulaires actuelles du robot vers Mech-Vision.
|
Mech-Vision GetData
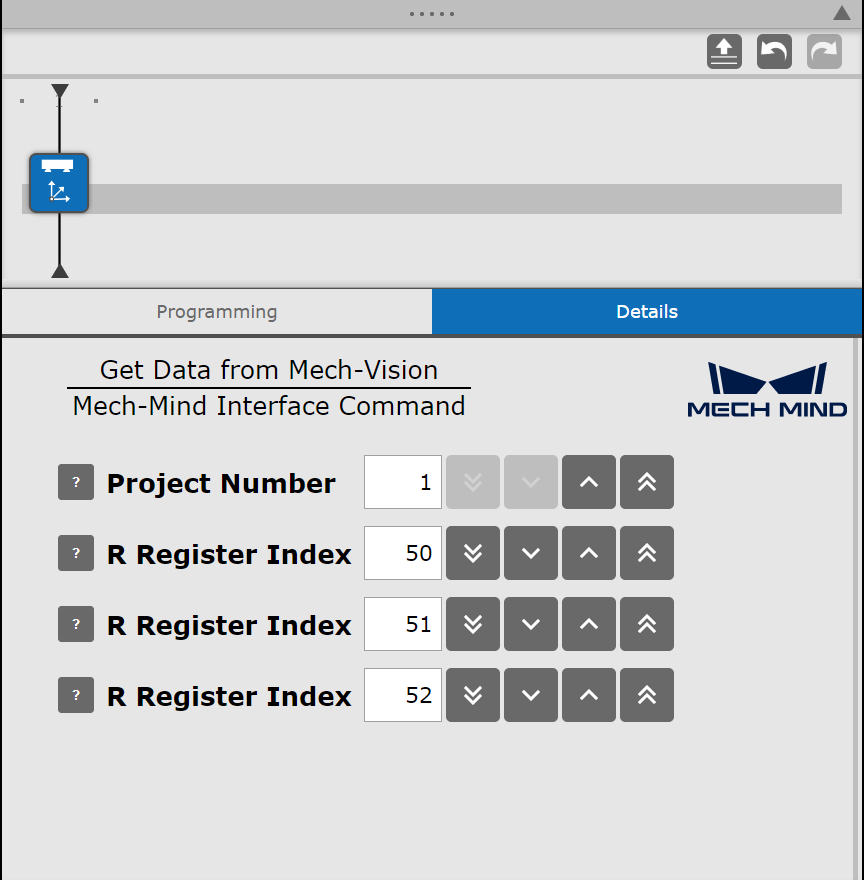
Cette commande est utilisée pour obtenir le résultat de vision du projet Mech-Vision correspondant. Elle doit être utilisée après Mech-Vision Déclenchement.
Paramètres
| Paramètre | Description |
|---|---|
ID du projet |
L’ID du projet Mech-Vision à déclencher ; vous pouvez vérifier l’ID du projet avant le nom du projet dans le panneau Liste de projets de Mech-Vision |
Registre R 1 |
1 : Tous les points de passage ont été envoyés
|
Registre R 2 |
Registre de données pour stocker le nombre de points de vision |
Registre R 3 |
Registre de données pour stocker le code d’état |
Mech-Vision SwitchConfig
Cette commande est utilisée pour basculer la recette de paramètres utilisée dans le projet Mech-Vision. Si vous devez modifier la recette de paramètres pour le projet Mech-Vision, configurez et enregistrez à l’avance la recette de paramètres dans Mech-Vision, puis connectez cette commande avant Mech-Vision Déclenchement.
Paramètres
| Paramètre | Description |
|---|---|
ID du projet |
L’ID du projet Mech-Vision à déclencher ; vous pouvez vérifier l’ID du projet avant le nom du projet dans le panneau Liste de projets de Mech-Vision |
ID de recette |
L’ID d’une recette de paramètres dans le projet Mech-Vision |
Mech-Vision SetBoxSize
Cette commande est utilisée pour saisir les dimensions de l’objet dans l’étape Lire les dimensions de l’objet du projet Mech-Vision.
Paramètres
| Paramètre | Description |
|---|---|
ID du projet |
L’ID du projet Mech-Vision à déclencher ; vous pouvez vérifier l’ID du projet avant le nom du projet dans le panneau Liste de projets de Mech-Vision |
Longueur |
Longueur de l’objet en mm |
Largeur |
Largeur de l’objet en mm |
Hauteur |
Hauteur de l’objet en mm |
Mech-Viz Trigger
Cette commande déclenche l’exécution du projet Mech-Viz.
Paramètres
| Paramètre | Description |
|---|---|
Type de position |
JPS : Envoie les positions articulaires actuelles du robot vers Mech-Viz pour synchroniser le mouvement du robot
|
Mech-Viz GetData
Cette commande obtient le trajet planifié depuis Mech-Viz. Elle doit être utilisée après Mech-Viz Déclenchement.
Paramètres
| Paramètre | Description | ||
|---|---|---|---|
Type de valeur de retour |
1 : Envoie des positions articulaires
|
||
Registre R 1 |
1 : Tous les points de passage ont été envoyés
|
||
Registre R 2 |
Registre de données pour stocker le nombre de points de passage reçus
|
||
Registre R 3 |
Registre de données pour stocker le numéro de séquence du point de passage de prise dans le trajet |
||
Registre R 4 |
Registre de données pour stocker le code d’état |
Mech-Viz SetBranch
Cette commande sert à sélectionner la branche le long de laquelle le projet Mech-Viz doit se poursuivre.
Paramètres
| Paramètre | Description |
|---|---|
Nom de branche |
ID de l’étape « Branch by Msg » dans |
Sortie de branche |
Le numéro du port de sortie à prendre + 1, de 1 à 99 |
Mech-Viz SetIndex
Cette commande définit la valeur du paramètre Index actuel d’une étape Mech-Viz. Les étapes qui possèdent ce paramètre incluent Move by List, Move by Grid, Custom Pallet Pattern et Predefined Pallet Pattern.
Paramètres
| Paramètre | Description |
|---|---|
Nom de la compétence de déplacement |
ID de l’étape avec le paramètre d’index |
Index |
Le paramètre d’index de l’étape spécifiée sera défini sur cette valeur, et la valeur du paramètre doit être la valeur d’index actuelle dans Mech-Viz plus 1 |
Mech-System GetPose
Cette commande stocke un point de vision renvoyé par Mech-Vision ou un point de passage (tel qu’un TCP) du trajet renvoyé par Mech-Viz dans le Position Register spécifié. Si vous souhaitez obtenir plusieurs points de vision ou points de passage, vous pouvez utiliser cette commande plusieurs fois et modifier respectivement leur index de position.
Paramètres
| Paramètre | Description |
|---|---|
Index de position |
Spécifiez l’index de la pose à stocker |
Index PR |
Position Register pour stocker la pose spécifiée |
Registre R 1 |
Registre de données pour stocker le libellé correspondant à la pose spécifiée |
Registre R 2 |
Registre de données pour stocker la vitesse correspondant à la pose spécifiée ; la valeur reste 0 |
Mech-System GetPoseJPS
Cette commande stocke un ensemble de positions articulaires renvoyées par Mech-Viz dans les Position Registers spécifiés. Si vous souhaitez obtenir plusieurs ensembles de positions articulaires du point de passage, vous pouvez utiliser cette commande plusieurs fois et modifier respectivement leur index de position.
Paramètres
| Paramètre | Description |
|---|---|
Index de position |
Spécifiez l’index de l’ensemble de positions articulaires à stocker |
Index PR |
Position Register pour stocker l’ensemble de positions articulaires spécifié |
Registre R 1 |
Registre de données pour stocker le libellé correspondant à l’ensemble de positions articulaires spécifié |
Registre R 2 |
Registre de données pour stocker la vitesse correspondant à l’ensemble de positions articulaires spécifié |