YASKAWA Étalonnage automatique
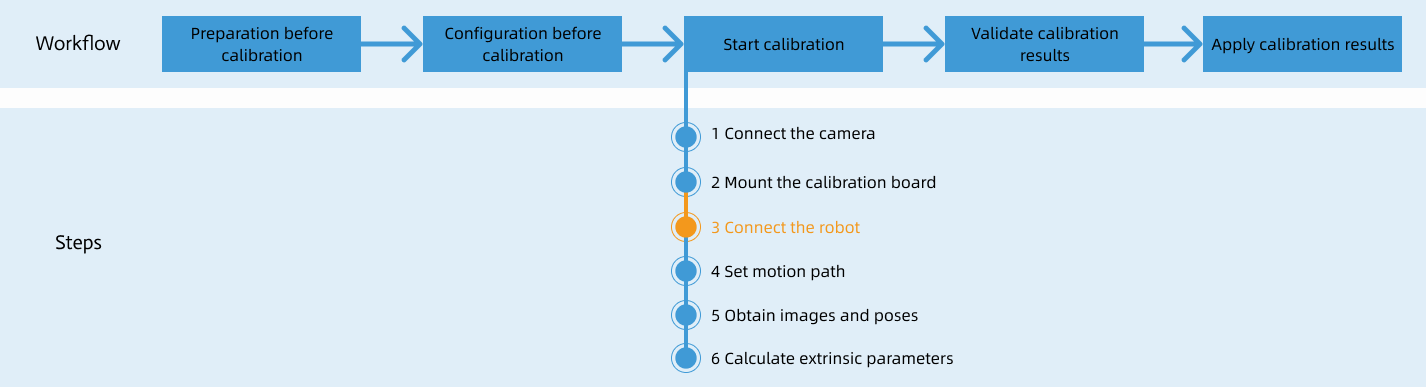
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
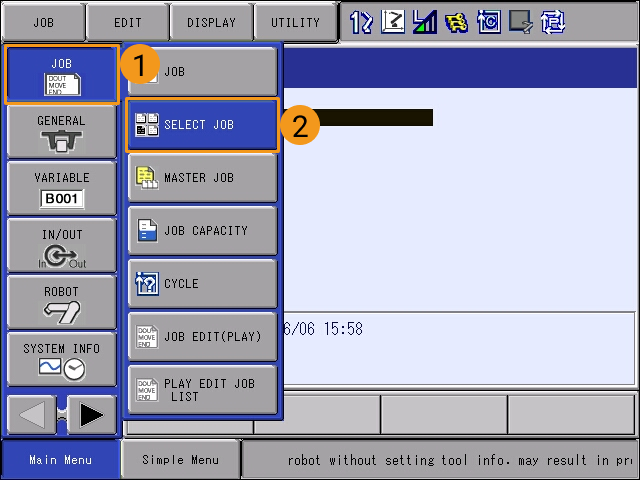
1. Sélectionner et modifier le programme d’étalonnage
-
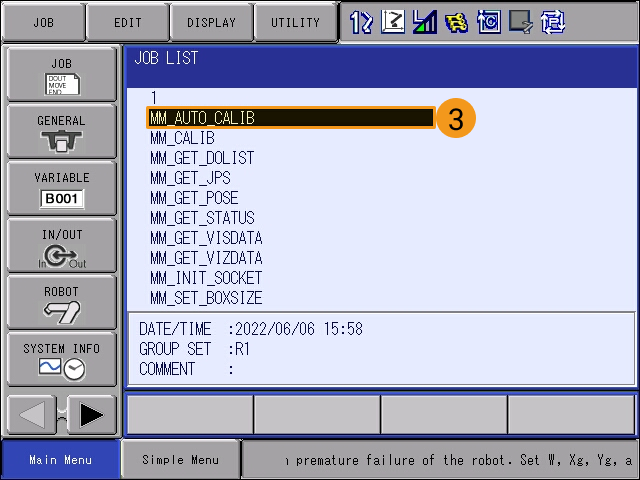
Sélectionnez et déplacez le curseur sur MM_AUTO_CALIB dans la LISTE DES JOBS.
-
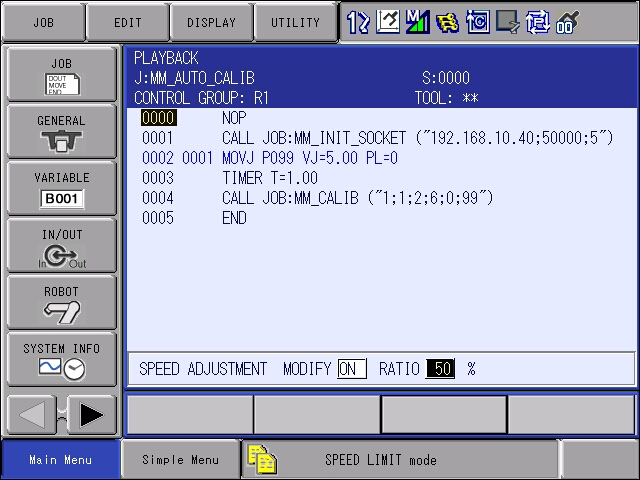
Après avoir sélectionné ce fichier de programme, appuyez sur SÉLECTIONNER sur le boîtier d’apprentissage pour accéder à l’interface suivante.
-
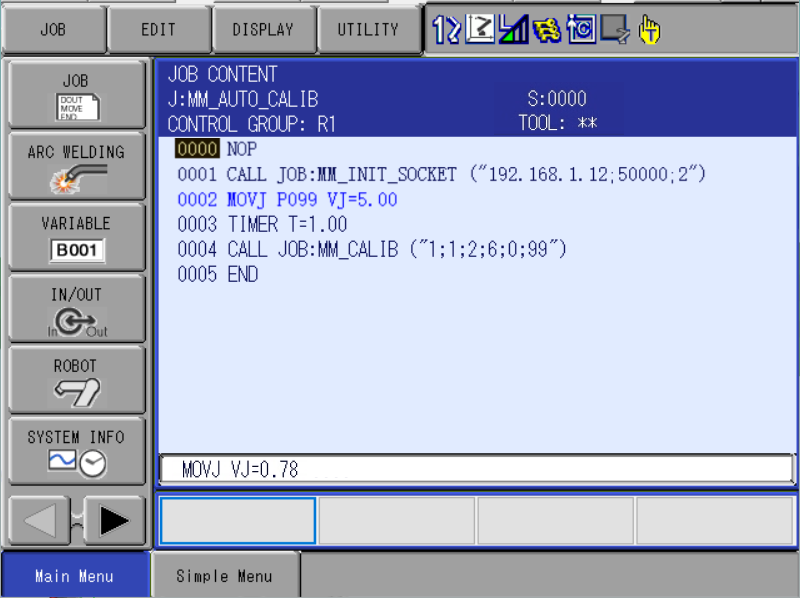
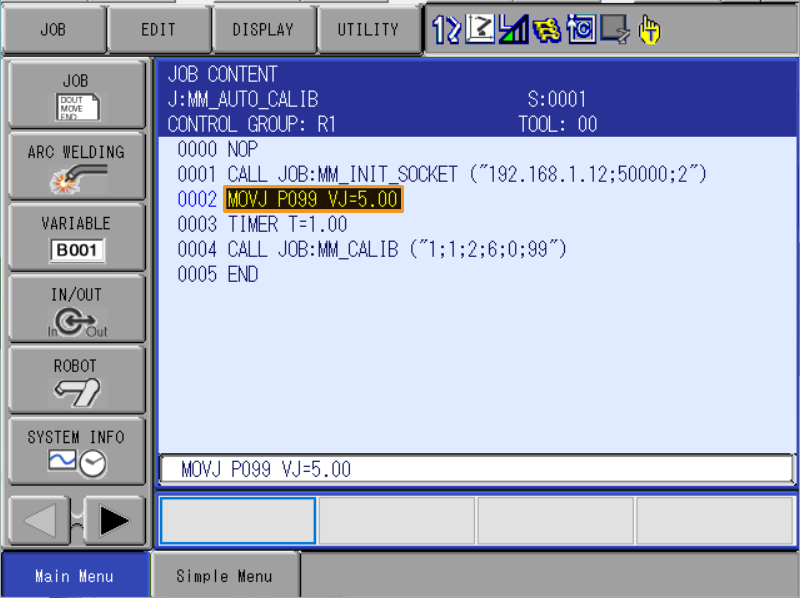
Sélectionnez le contenu de la ligne 0001, puis sélectionnez l’adresse IP et le numéro de port dans la zone de texte en bas. Appuyez sur ENTRÉE pour entrer dans l’interface d’édition.
-
Modifiez l’adresse IP pour celle de l’IPC. Si le numéro de port hôte défini dans Mech-Vision est modifié, le numéro de port 50000 ici doit être modifié en conséquence afin qu’il soit cohérent avec le numéro de port hôte défini dans Mech-Vision. Une fois les modifications terminées, appuyez deux fois sur la touche ENTRÉE en bas à droite du boîtier d’apprentissage pour revenir à l’interface de contenu du programme.
2. Enseigner le point de départ de l’étalonnage
-
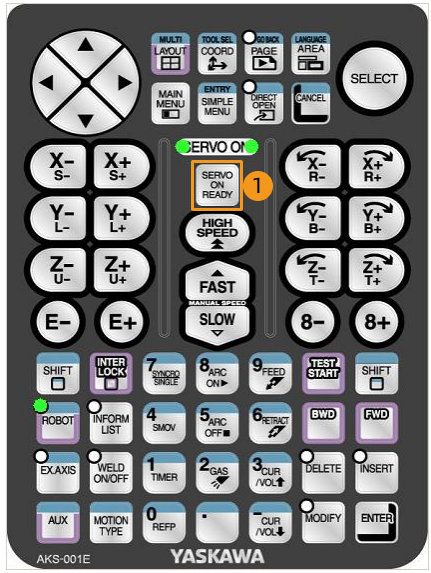
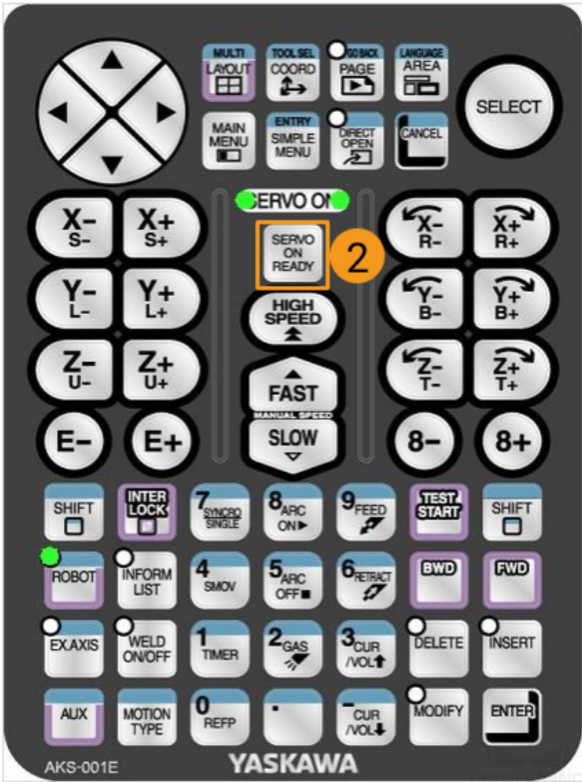
Appuyez sur la touche SERVO EN MARCHE PRÊT sur le boîtier d’apprentissage, maintenez enfoncé l' interrupteur d’activation à l’arrière du boîtier d’apprentissage, puis déplacez manuellement le robot jusqu’au point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.

-
Déplacez le curseur sur la ligne MOVJ P099 VJ=5 et appuyez sur la touche OUVERTURE DIRECTE sur le boîtier d’apprentissage.
-
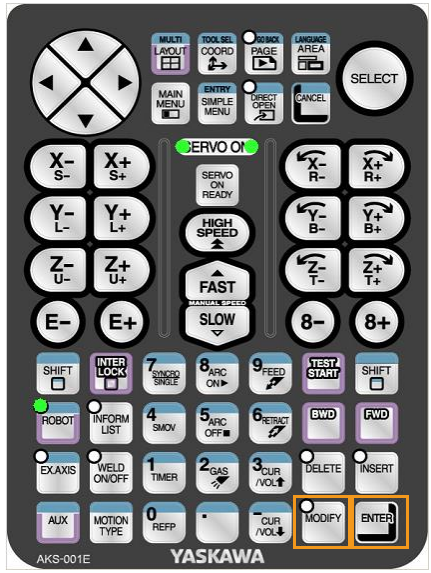
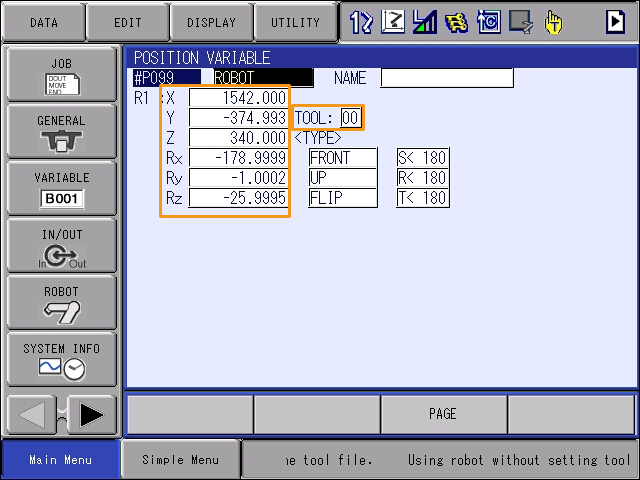
Après avoir appuyé sur la touche SERVO EN MARCHE PRÊT sur le boîtier d’apprentissage, maintenez l' interrupteur d’activation au dos du boîtier avec une main (attendez que l’autre main termine l’opération avant de le relâcher). Avec l’autre main, appuyez sur la touche MODIFIER, puis sur la touche ENTRÉE pour mettre à jour la variable de position P099 vers la position actuelle. Assurez-vous que le type de données de P099 est défini sur le type robot et que l’outil est 00.
-
Si la variable P099 contient des poses de bride ou des poses d’outil, le format de données de la variable P099 doit être défini sur le type robot.
-
Si la variable P099 contient des positions articulaires, le format de données de la variable P099 doit être défini sur le type joint ou pulse.
-
Les valeurs X, Y, Z, Rx, Ry et Rz pour OUTIL 00 doivent être préalablement définies sur 0.
-
-
Appuyez à nouveau sur la touche OUVERTURE DIRECTE sur le boîtier d’apprentissage pour revenir à CONTENU DU JOB.
3. Exécuter le programme d’étalonnage
-
Ramenez le curseur à la ligne 0000, tournez le commutateur de mode sur le mode PLAY, puis appuyez sur SERVO EN MARCHE PRÊT sur le boîtier d’apprentissage.

Pour ajuster la vitesse pour un fonctionnement à basse vitesse, suivez les étapes ci-dessous.
-
Dans l’interface du boîtier d’apprentissage, sélectionnez . Déplacez le curseur sur MM_AUTO_CALIB dans la LISTE DES JOBS et appuyez sur la touche SÉLECTIONNER sur le boîtier d’apprentissage.
-
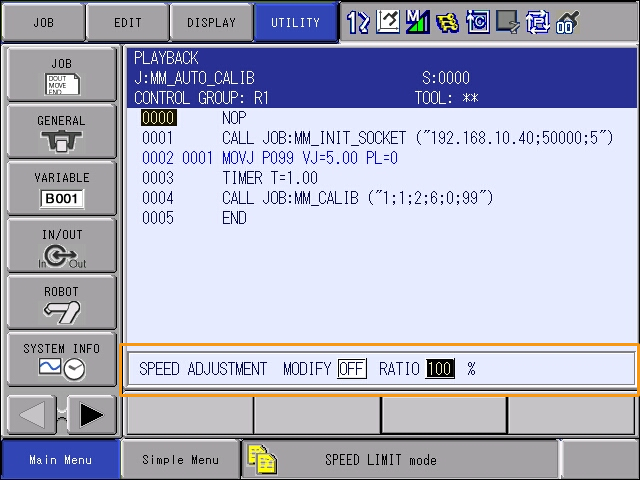
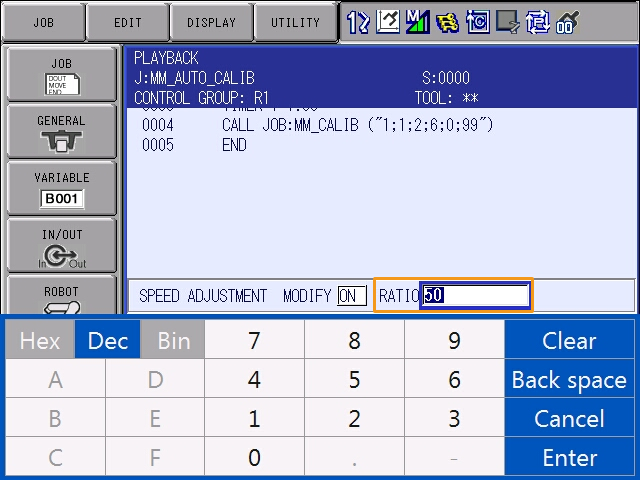
Sélectionnez , puis sélectionnez la barre RÉGLAGE DE LA VITESSE en bas.
Vous ne pouvez pas modifier les paramètres si la barre RÉGLAGE DE LA VITESSE n’est pas sélectionnée. 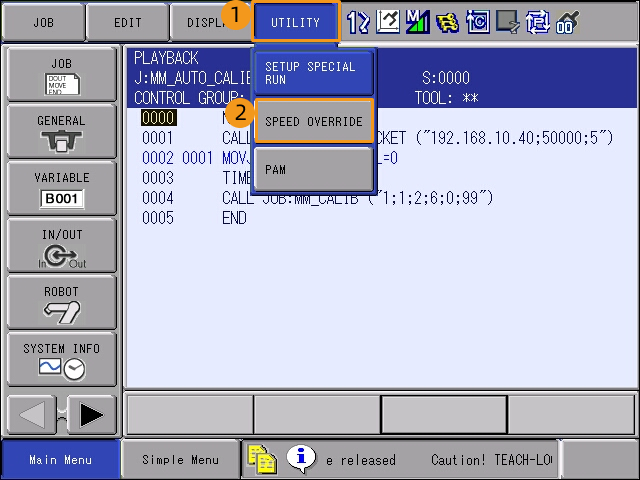
-
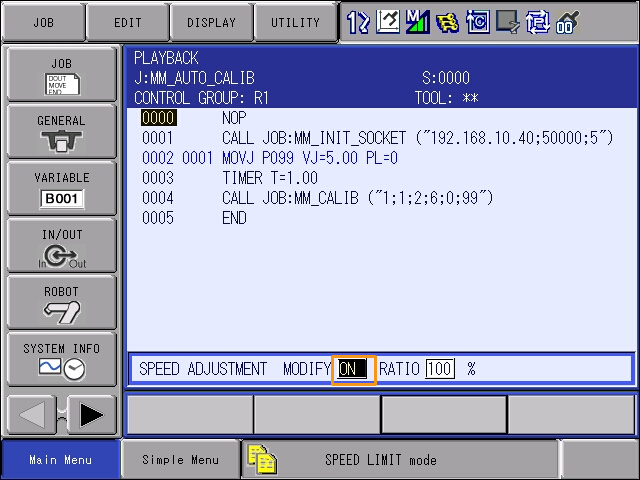
Dans la barre RÉGLAGE DE LA VITESSE, sélectionnez ARRÊT, puis appuyez sur la touche SÉLECTIONNER pour changer ARRÊT en MARCHE.
-
Ensuite, ajustez le ratio. De la même manière, appuyez sur le nombre après RATIO, puis appuyez sur la touche SÉLECTIONNER pour modifier le rapport de vitesse. Après avoir spécifié un nouveau ratio, appuyez sur la touche SÉLECTIONNER sur le boîtier d’apprentissage pour enregistrer la modification.
-
L’interface après réglage de la vitesse est la suivante.
-
-
Appuyez sur le bouton vert DÉMARRER sur le boîtier d’apprentissage. Le programme commence à s’exécuter lorsque le bouton s’allume.
En cas d’urgence, appuyez sur pause ouarrêt d’urgence immédiatement. 
-
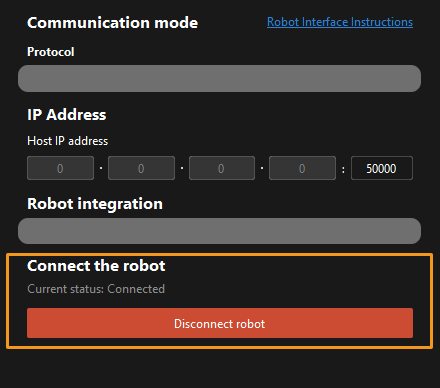
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-