Configuration de la communication et utilisation du programme d’exemple
Ce sujet présente deux méthodes pour configurer la communication de l’Interface Standard basée sur le protocole EtherNet/IP entre un PLC Mitsubishi MELSEC iQ-R Series (avec le module d’interface réseau RJ71EIP91) et le système de vision Mech-Mind.
-
Utiliser une carte PCI-e.
-
Configurer le logiciel. Aucune carte requise.
|
Exigences matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
Si vous configurez le logiciel pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les paramètres de connexion matérielle.
-
PLC :
-
PLC Mitsubishi série iQ-R avec module d’interface réseau RJ71EIP91. Un PLC avec module R00CPU est utilisé comme exemple dans les instructions suivantes.
-
Alimentation : R61P ; Unité de base : R33B
-
-
IPC
-
Câble USB Type A mâle vers USB Mini-B mâle
-
Commutateur réseau et câbles Ethernet
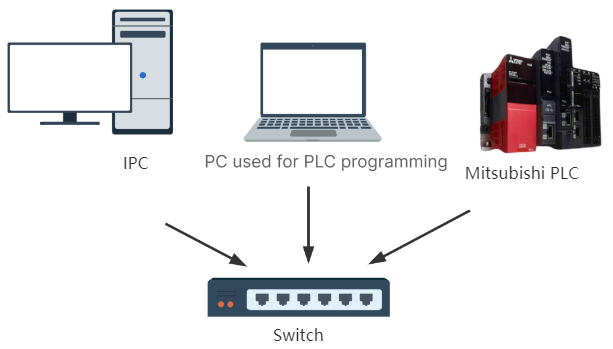
La connexion matérielle est la suivante. Chaque appareil possède une adresse IP unique, mais toutes doivent être dans le même sous-réseau et ne pas être utilisées par d’autres appareils. Pour les paramètres d’adresse IP du PLC, reportez-vous à la section ci-dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur avec GX Works3 installé, voir ce lien.
Si vous utilisez une carte PCI-e pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les paramètres de connexion matérielle.
-
PLC :
-
PLC Mitsubishi série iQ-R avec module d’interface réseau RJ71EIP91. Un PLC avec module R00CPU est utilisé comme exemple dans les instructions suivantes.
-
Alimentation : R61P ; Unité de base : R33B
-
-
IPC avec carte d’interface HMS IXXAT INpact 40 PCIe installée
-
Câble USB Type A mâle vers USB Mini-B mâle
-
Commutateur réseau et câbles Ethernet
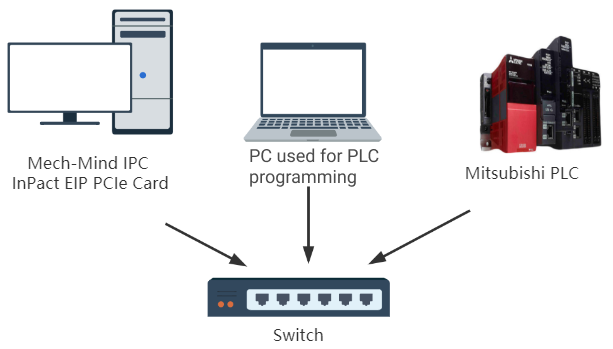
La connexion matérielle est la suivante. Chaque appareil possède une adresse IP unique, mais toutes doivent être dans le même sous-réseau et ne pas être utilisées par d’autres appareils. Pour les paramètres d’adresse IP du PLC et de la carte de communication, reportez-vous à la section ci-dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur avec GX Works3 installé, voir ce lien.
Logiciel
Si vous configurez le logiciel pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher le logiciel requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
GX Works3 1.081K |
Logiciel de programmation PLC Mitsubishi |
Ordinateur utilisé pour la programmation séquentielle du PLC |
Logiciel de configuration EtherNet/IP |
Ordinateur utilisé pour la programmation séquentielle du PLC |
|
Mech-Vision & Mech-Viz versions: 2.0.0 or above |
logiciel Mech-Mind |
IPC |
Veuillez copier-coller les fichiers suivants depuis l’IPC vers un ordinateur avec GX Works3 installé pour une utilisation ultérieure.
-
Fichier Software EIP.eds, utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier Software EIP.eds se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
Fichier d’exemple de programme PLC iQ-R_RJ71EIP91.usl, qui contient les bibliothèques utilisateur suivantes :
-
M_RJ71EIP91_Class1SetOutputData_00A : communique via Class1 pour obtenir les données d’entrée de la connexion spécifiée.
-
M_RJ71EIP91_Class1GetInputData_00A : communique via Class1 pour définir les données de sortie de la connexion spécifiée.
-
CameraSignalsMove : utilisé pour transférer les signaux du système de vision ;
-
CameraTest : utilisé pour tester le système de vision ;
-
MM_XXX_XXX FB : utilisé pour implémenter les fonctions de diverses commandes d’interface.
Les fichiers de programme d’exemple sont stockés dans Communication Component/Robot_Interface/EthernetIP/Programming Samples/MITSUBISHI iQ-R PLC EthernetIPdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. -
Si vous utilisez une carte PCI-e pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher le logiciel requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
GX Works3 1.081K |
Logiciel de programmation PLC Mitsubishi |
Ordinateur utilisé pour la programmation séquentielle du PLC |
Logiciel de configuration EtherNet/IP |
Ordinateur utilisé pour la programmation séquentielle du PLC |
|
Mech-Vision & Mech-Viz versions: 2.0.0 or above |
logiciel Mech-Mind |
IPC |
Utilisé pour configurer l’adresse IP de la carte PCIe |
IPC |
Veuillez copier-coller les fichiers suivants depuis l’IPC vers un PC avec GX Works3 installé pour une utilisation ultérieure.
-
Fichier 005A002B003A0100.EDS, utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
Fichier d’exemple de programme PLC iQ-R_RJ71EIP91.usl, qui contient les bibliothèques utilisateur suivantes :
-
M_RJ71EIP91_Class1SetOutputData_00A : communique via Class1 pour obtenir les données d’entrée de la connexion spécifiée.
-
M_RJ71EIP91_Class1GetInputData_00A : communique via Class1 pour définir les données de sortie de la connexion spécifiée.
-
CameraSignalsMove : utilisé pour transférer les signaux du système de vision ;
-
CameraTest : utilisé pour tester le système de vision ;
-
MM_XXX_XXX FB : utilisé pour implémenter les fonctions de diverses commandes d’interface.
Les fichiers de programme d’exemple sont stockés dans Communication Component/Robot_Interface/EthernetIP/Programming Samples/MITSUBISHI iQ-R PLC EthernetIPdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. -
Configurer la communication
Si vous configurez le logiciel pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Ouvrez Mech-Vision, et vous pouvez arriver sur différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous êtes arrivé sur l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes arrivé sur l’interface principale, cliquez sur dans la barre de menus.

-
Cliquez sur la liste déroulante Sélectionner le robot, puis choisissez soit Robot répertorié soit Robot personnalisé en fonction du robot utilisé dans votre projet. Ensuite, cliquez sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. La convention des angles d’Euler du robot et le système de coordonnées du robot doivent être sélectionnés.
-
-
-
Dans la fenêtre Configuration de la communication du robot, complétez les paramètres suivants.
-
Cliquez sur le menu déroulant Sélectionner le robot, puis sélectionnez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, puis choisissez le modèle de robot que vous utilisez. Ensuite, cliquez sur Suivant.
-
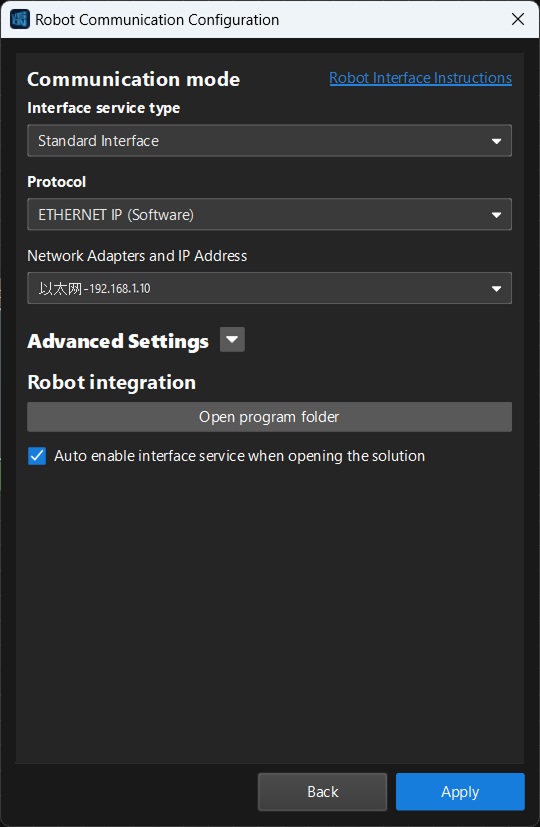
Dans la section Mode de communication, définissez Type de service d’interface sur Interface standard, définissez Protocole sur ETHERNET IP (Software), et définissez Cartes réseau et adresse IP sur la carte réseau et l’adresse IP utilisées par l’IPC.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication du robot dans la barre d’outils est activé et est devenu bleu.

Si vous utilisez une carte PCI-e pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
Vérifier la carte PCI-e et le pilote
-
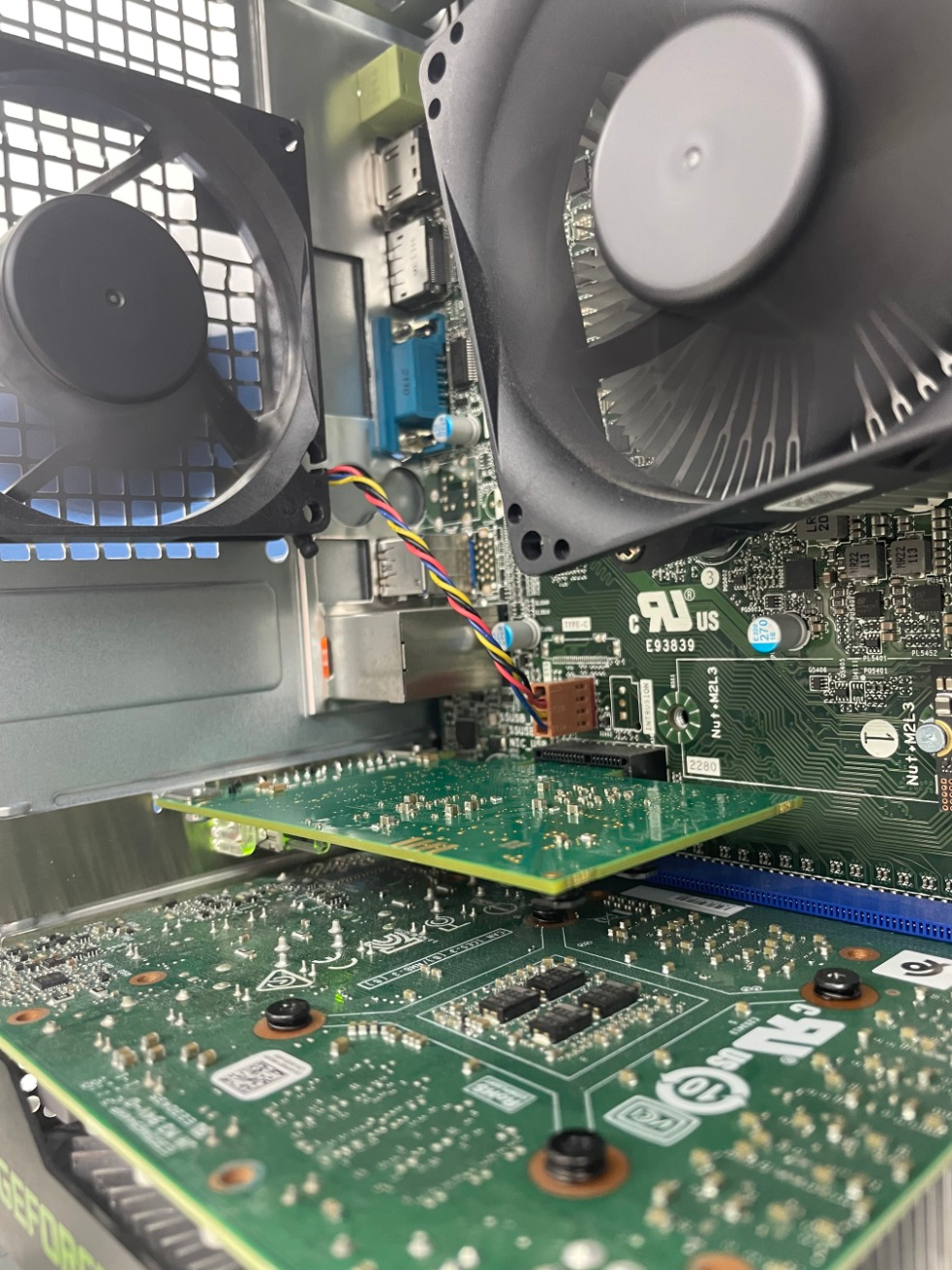
Veuillez vous assurer que la carte d’interface INpact EIP Slave PCIe est bien enfoncée dans le slot PCI-e de l’IPC, comme illustré ci-dessous.
-
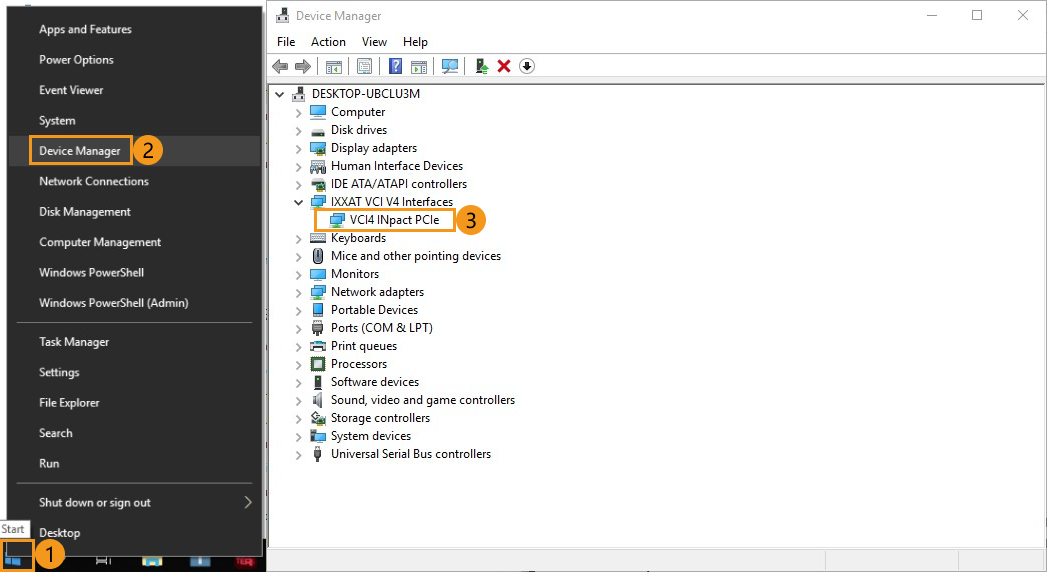
Démarrez l’IPC, allez à Démarrer ‣ Gestionnaire de périphériques et vérifiez si le pilote VCI4 INpact PCIe a été installé.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.
-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.
-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
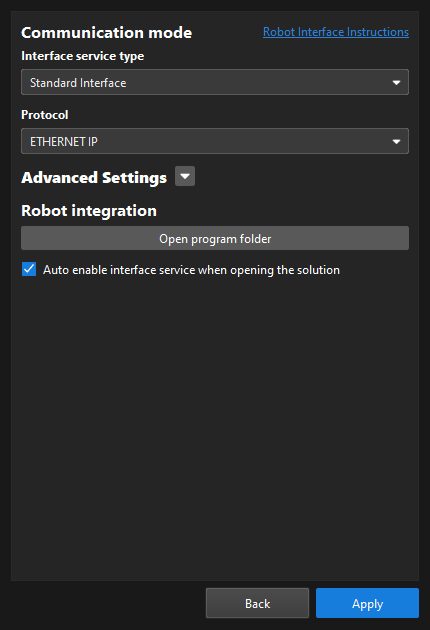
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface et sélectionnez ETHERNET IP pour Protocole.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication robot dans la barre d’outils est basculé et devient bleu.
Configurer l’adresse IP de la carte PCI-e
| Assurez-vous que le service d’interface a été activé avant de poursuivre les opérations suivantes. |
-
Utilisez un câble Ethernet pour connecter les ports réseau de l’IPC et de l’INpact EIP Slave PCIe.
Après avoir configuré l’IP et établi la communication avec succès, le câble Ethernet utilisé ici peut être retiré. -
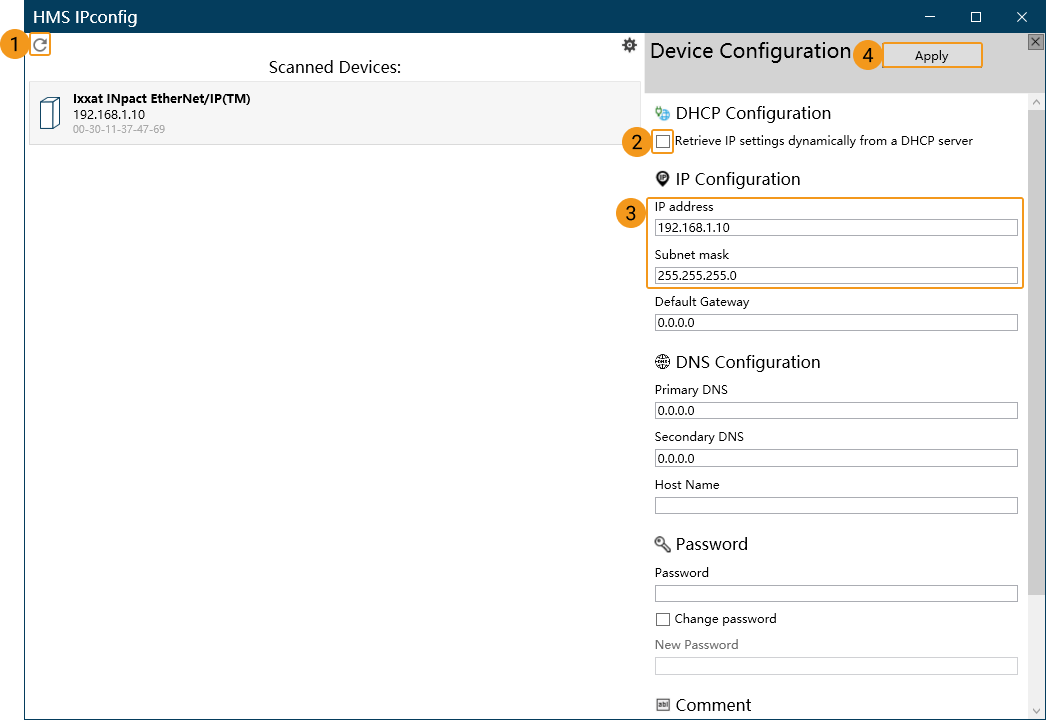
Ouvrez HMS IPconfig, cliquez sur l’icône d’analyse et désélectionnez « Récupérer dynamiquement les paramètres IP à partir d’un serveur DHCP », puis saisissez l’adresse IP et le masque de sous-réseau. Après la configuration, cliquez sur Appliquer et quittez le logiciel.
Créer et configurer le projet PLC
Créer un projet PLC
-
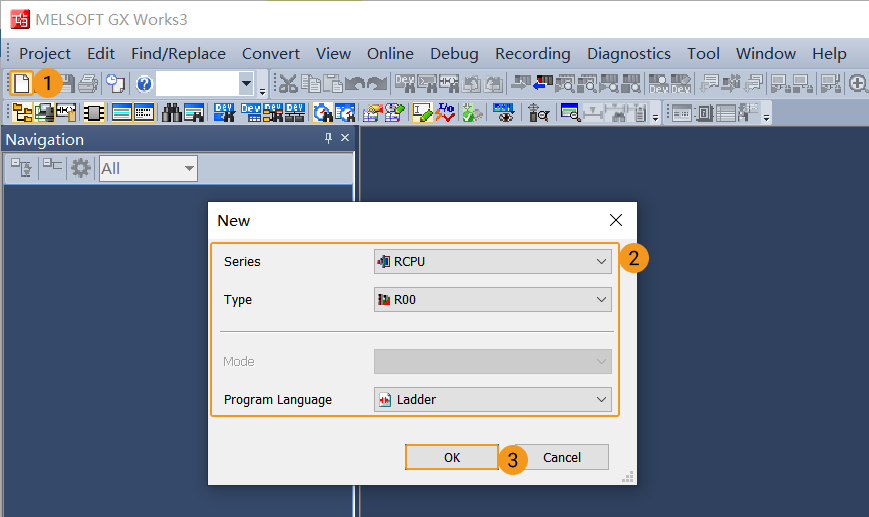
Ouvrez GX Works3, cliquez sur l’icône Nouveau dans la barre d’outils. Dans la fenêtre New, définissez Series sur RCPU, Type sur R00, et Program Language sur Ladder, puis cliquez sur OK.
-
Dans la fenêtre Ajouter un module, cliquez sur Modification des paramètres.
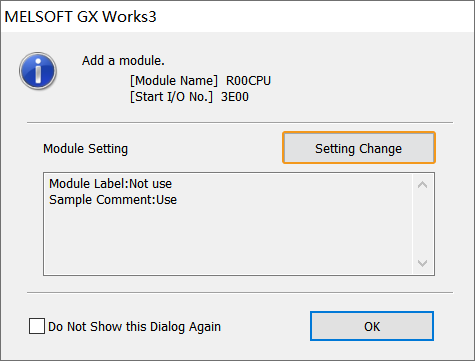
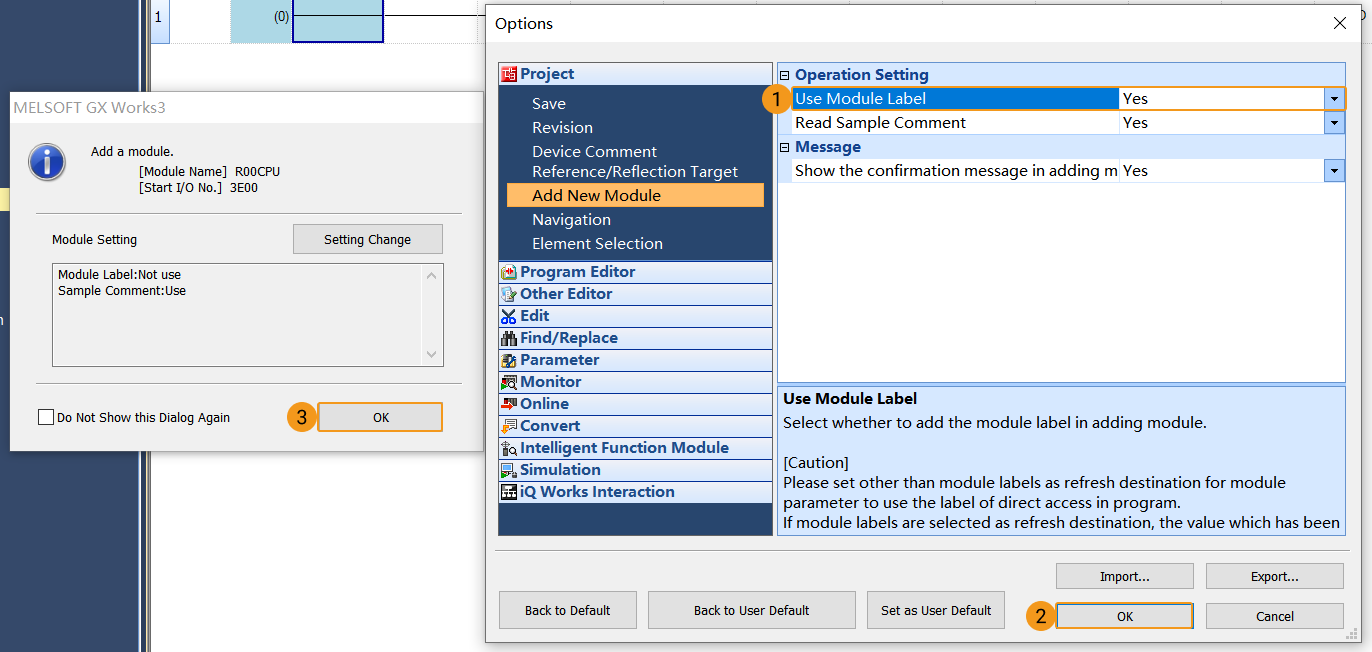
Dans la fenêtre Options, sélectionnez Oui dans la liste déroulante à côté de « Utiliser l’étiquette de module », puis cliquez sur OK. Retournez à la fenêtre Ajouter un module, puis cliquez sur OK.
-
Dans la section Destination de connexion actuelle du panneau Destination de connexion à gauche, double-cliquez sur Connexion.
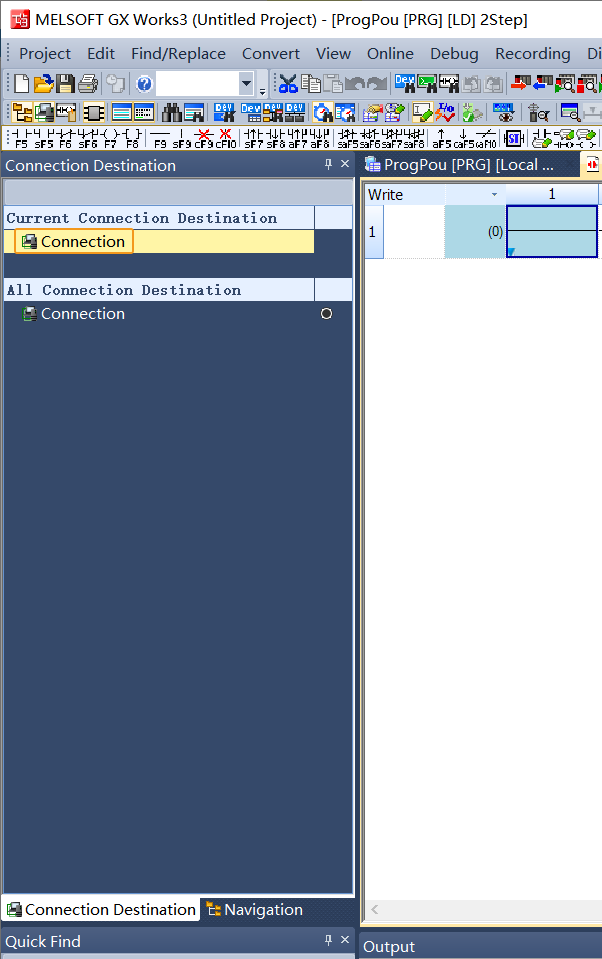
-
Une fenêtre Spécifier la destination de connexion s’affiche.
-
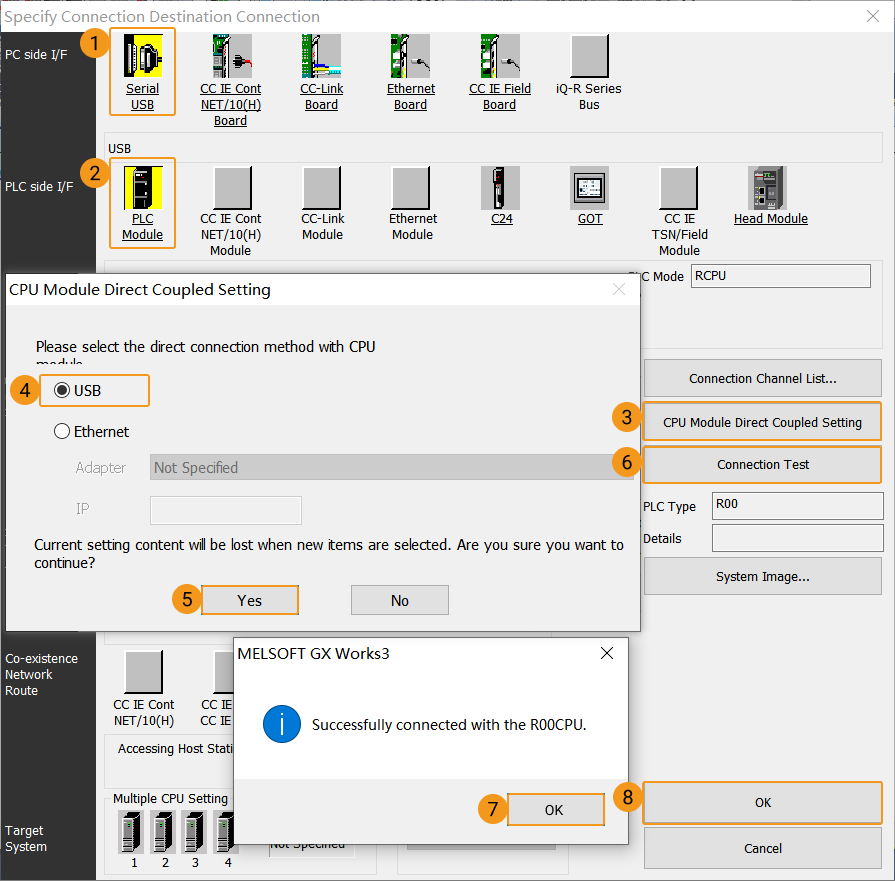
Sélectionnez Serial USB côté PC, et sélectionnez PLC Module côté PLC ; RCPU sera automatiquement rempli comme mode PLC.
-
Cliquez sur CPU Module Direct Coupled Setting. Sélectionnez USB dans la fenêtre contextuelle et cliquez sur Oui.
-
Retournez à la fenêtre Spécifier la destination de connexion, puis cliquez sur Connection Test. Si un message Connexion réussie avec le R00CPU s’affiche, le logiciel GX Works3 a bien communiqué avec le PLC.
-
Cliquez sur OK dans la fenêtre Spécifier la destination de connexion et retournez à l’interface principale de GX Works3.
-
-
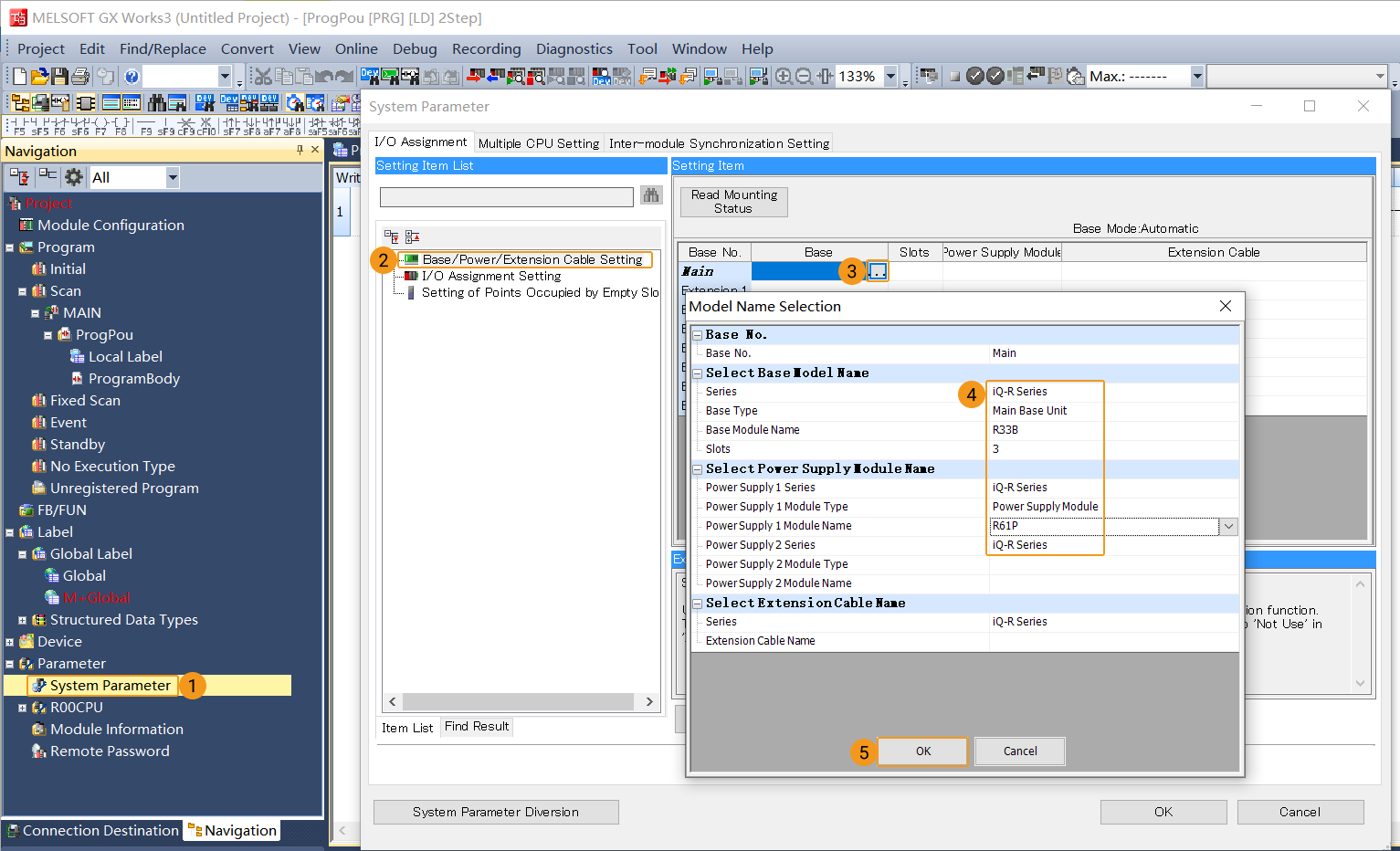
Dans la fenêtre de navigation à gauche, développez Parameter et double-cliquez sur System Parameter, une fenêtre System Parameter s’affiche.
-
Dans l’onglet I/O Assignment de la fenêtre System Parameter, sélectionnez Base/Power/Extension Cable Setting, cliquez sur le bouton de la colonne Base à droite de Main, et une fenêtre Model Name Selection s’affichera.
-
Dans la fenêtre Model Name Selection, sélectionnez le module de base et le module d’alimentation selon la situation réelle, puis cliquez sur OK.
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
-
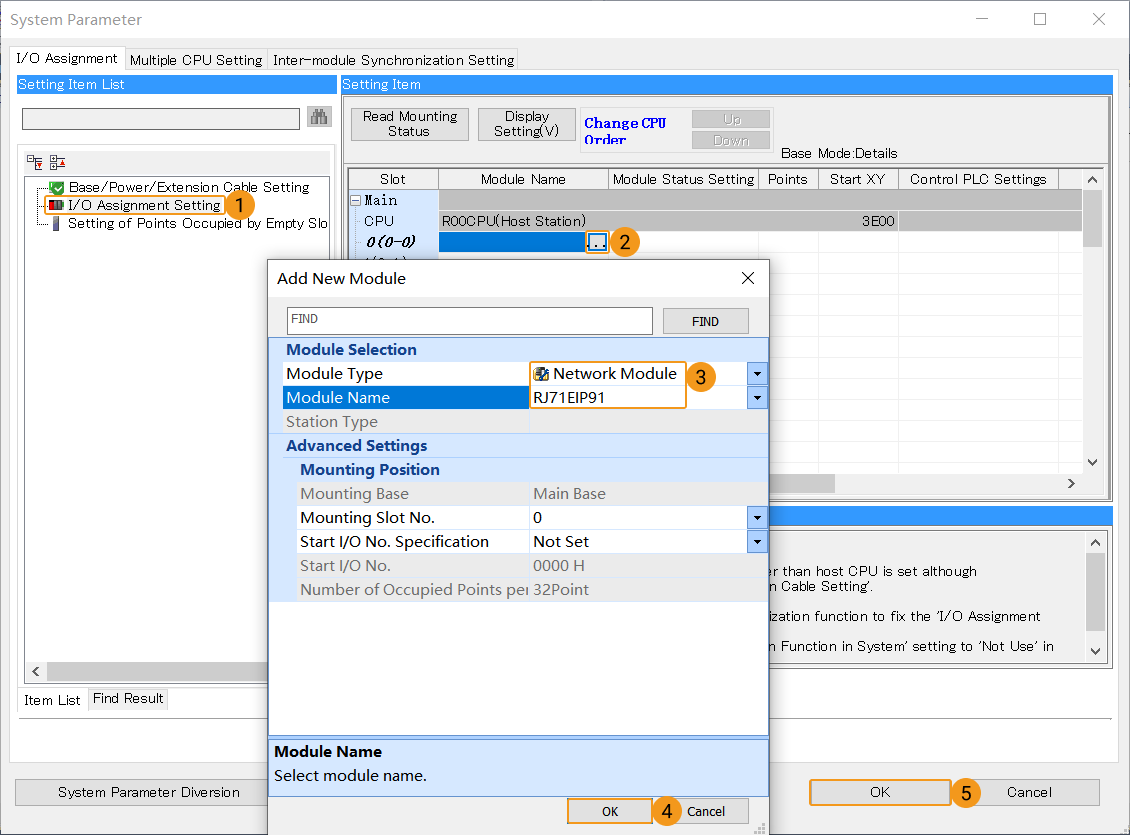
Dans l’onglet I/O Assignment de la fenêtre System Parameter, sélectionnez I/O Assignment Setting, cliquez sur le bouton dans la colonne Module Name à côté de 0 (0-0), et une fenêtre Add New Module s’affichera.
-
Dans la fenêtre Add New Module, définissez Module Type sur Network Module et Module Name sur RJ71EIP91, puis cliquez sur OK dans chacune des deux fenêtres.
-
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
-
-
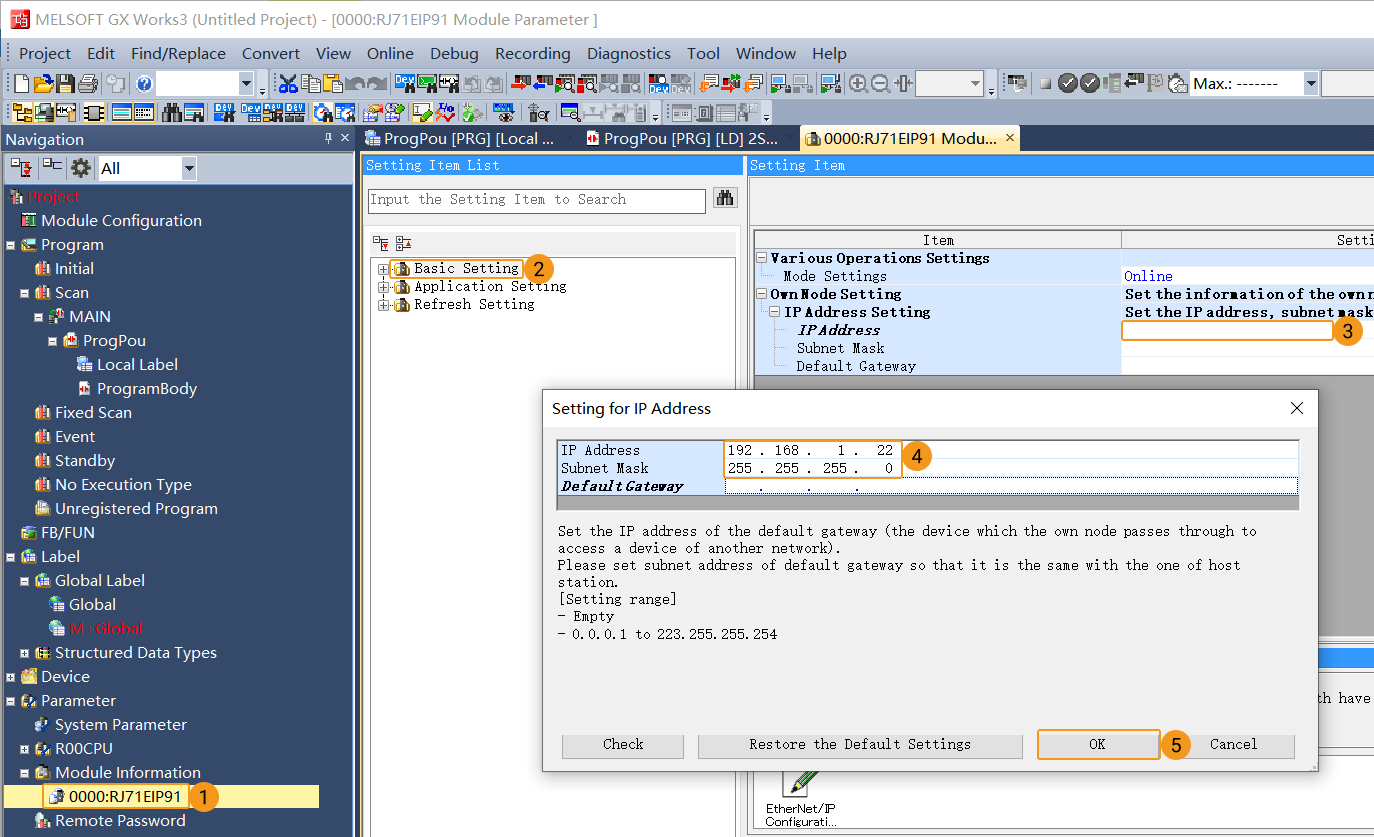
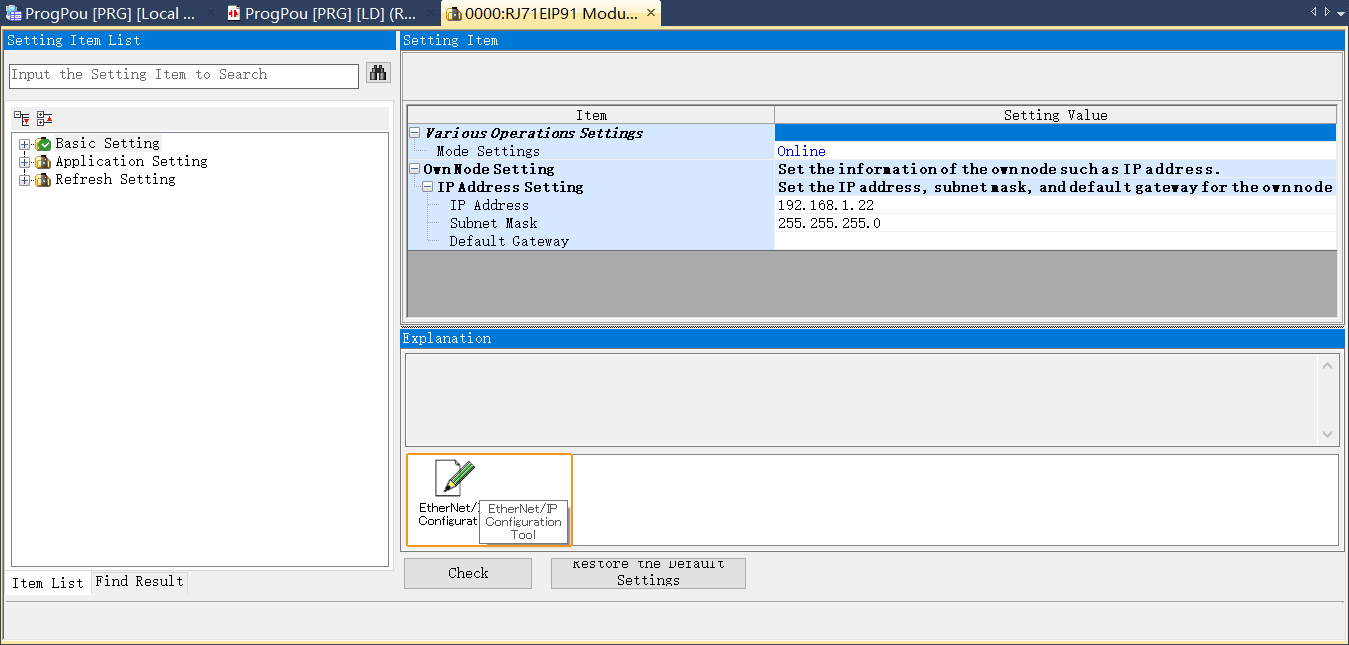
Dans la fenêtre de navigation à gauche, développez Parameter et double-cliquez sur le nouvel 0000:RJ71EIP91, et la fenêtre Module Parameter apparaîtra.
-
Dans la fenêtre Module Parameter, sélectionnez Basic Setting, développez Own Mode Setting et double-cliquez sur l’espace vide à côté de IP Address.
-
Dans la fenêtre Setting for IP Address, définissez l’adresse IP et le masque de sous-réseau, puis cliquez sur OK.
-
Télécharger la configuration matérielle vers le PLC
-
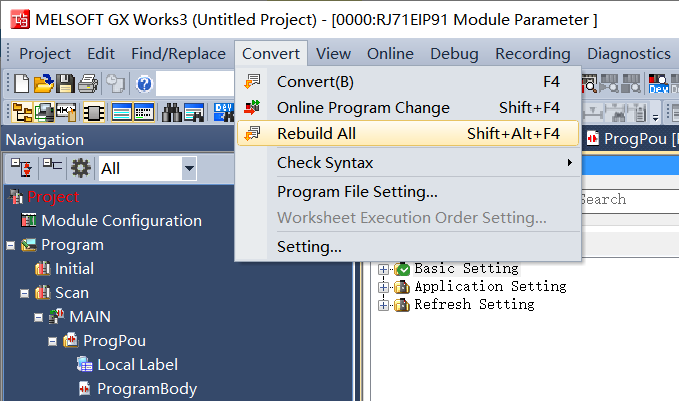
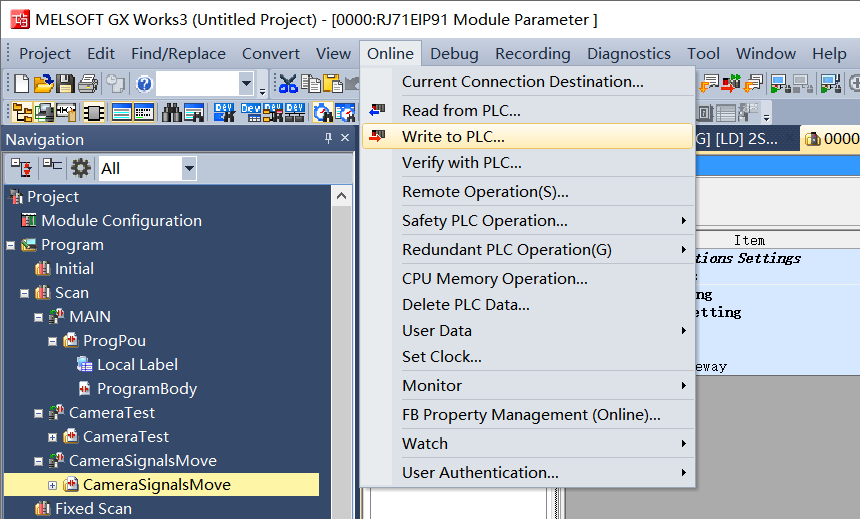
Sélectionnez Program dans le panneau Navigation à gauche, et sélectionnez dans la barre de menus.
-
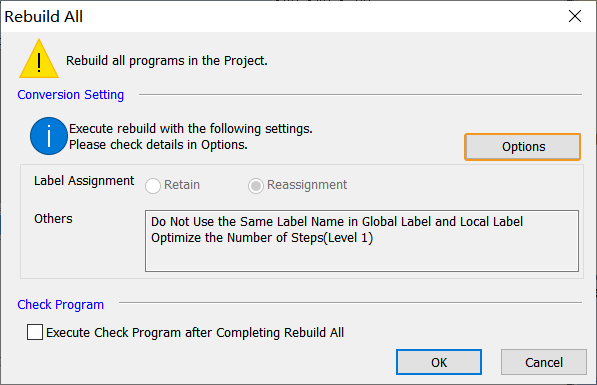
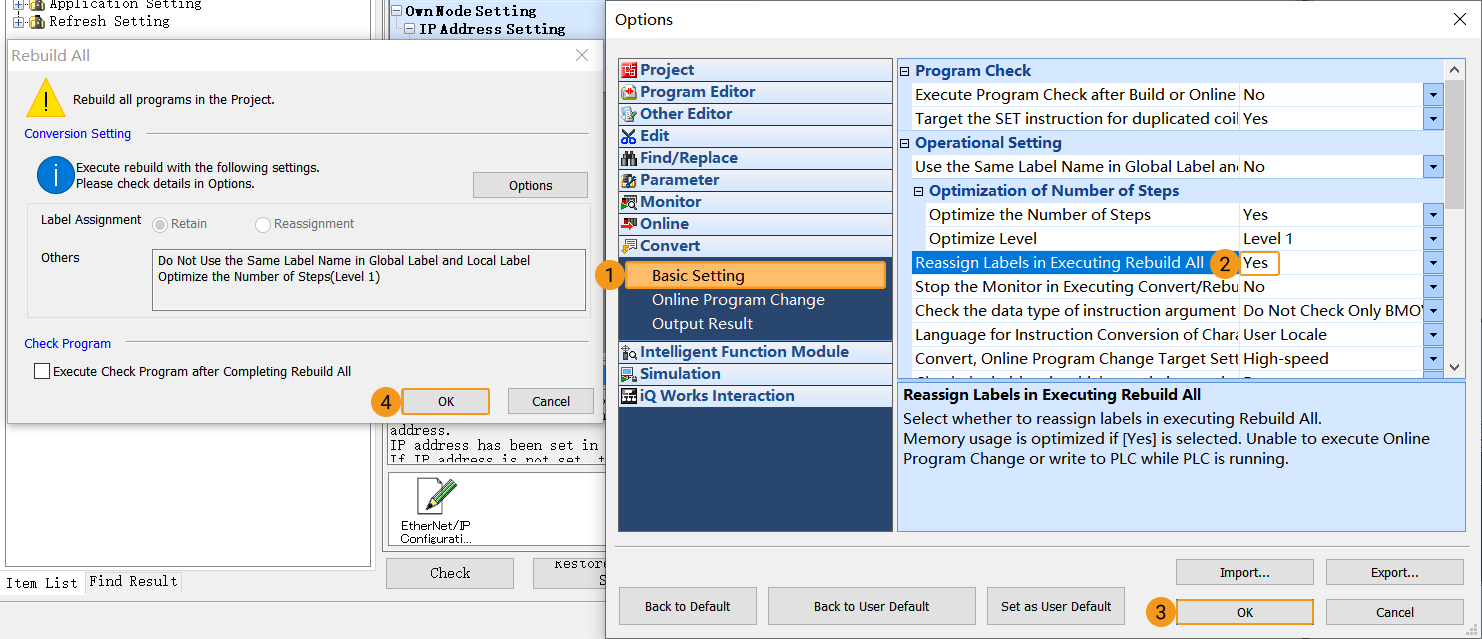
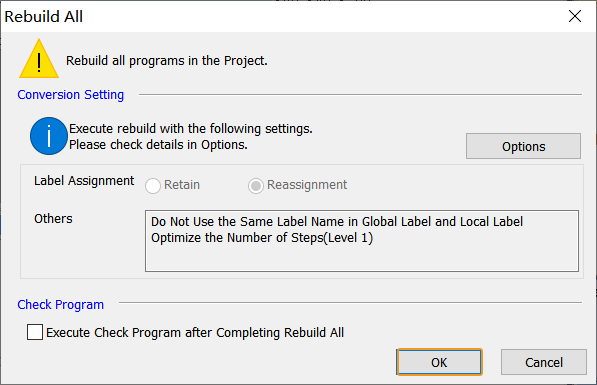
Dans la fenêtre Rebuild All, cliquez sur Options, et une fenêtre Options s’affichera.
-
Dans la fenêtre Options, cliquez sur Basic Setting à gauche, et sélectionnez Oui pour « Réaffecter les étiquettes lors de l’exécution de Reconstruire tout », puis cliquez sur OK.
-
Retournez à la fenêtre Rebuild All et cliquez sur OK.
-
-
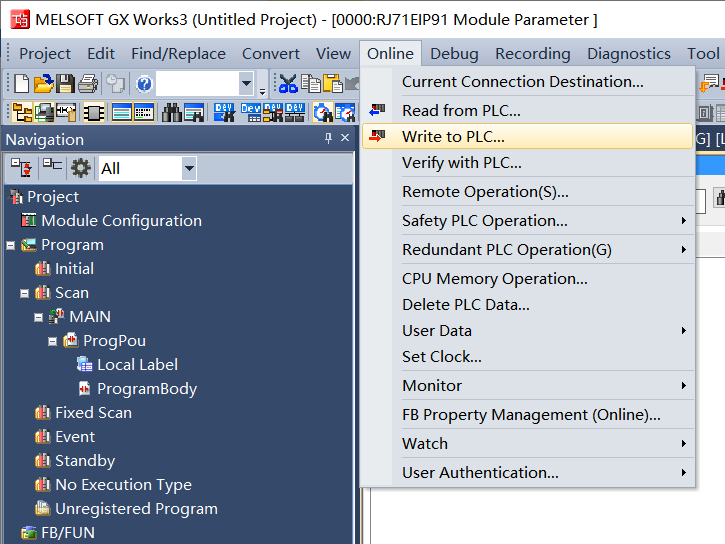
Après la conversion réussie du programme, cliquez sur dans la barre de menus.
-
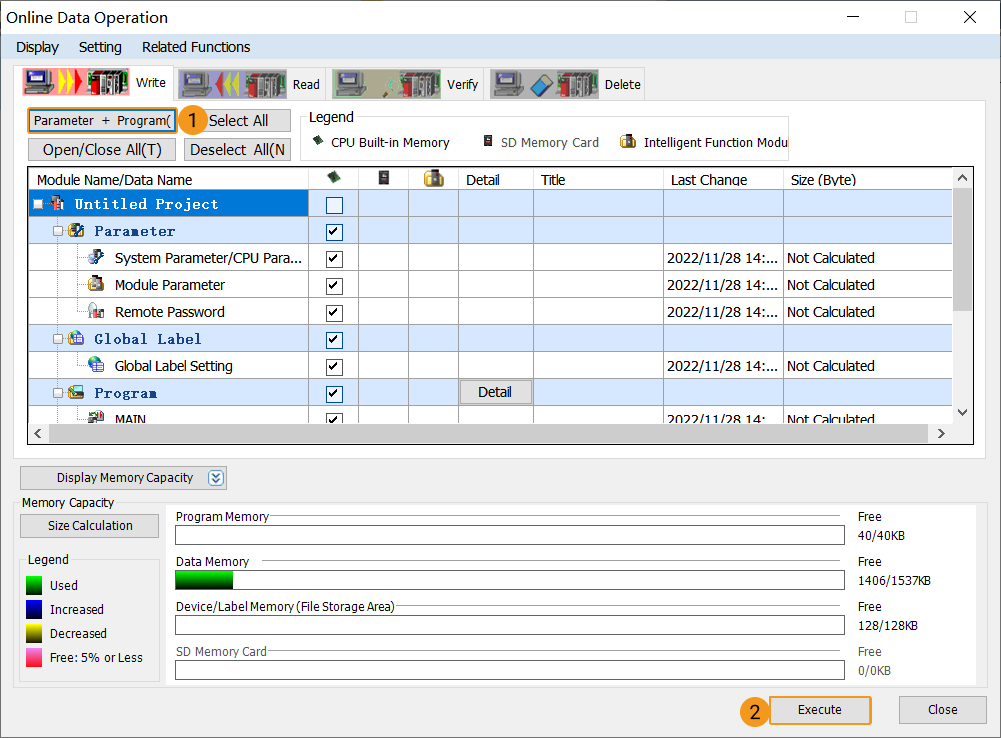
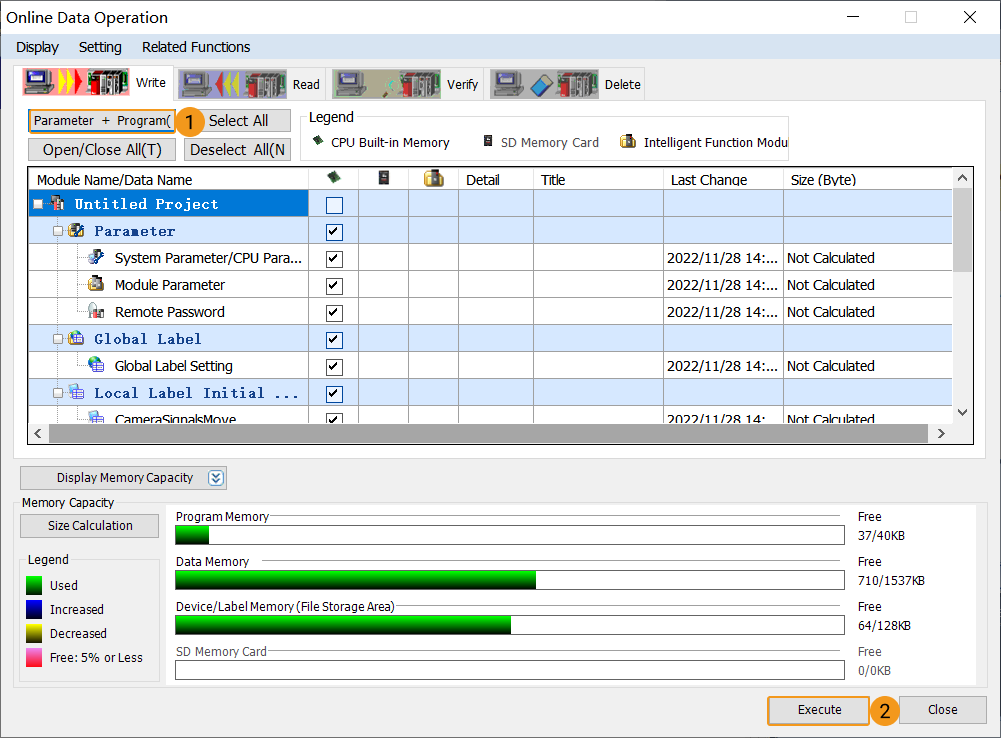
Dans la fenêtre Online Data Operation, cliquez sur l’onglet Write, puis cliquez sur Paramètre + Programme, puis sur Exécuter.
-
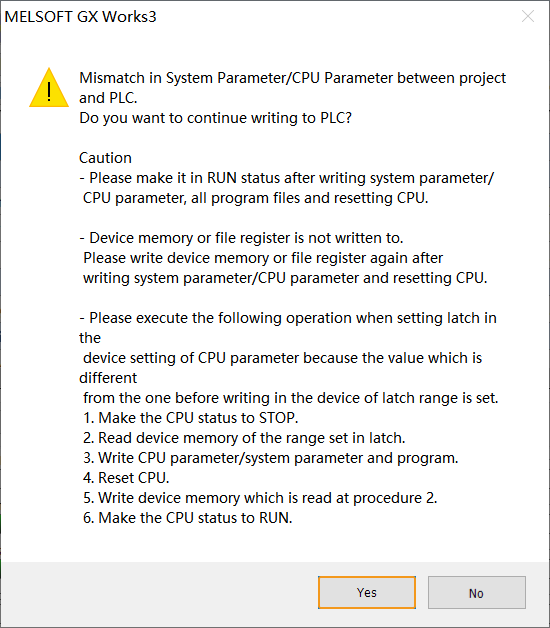
Cliquez sur Oui dans la fenêtre contextuelle comme indiqué ci-dessous.
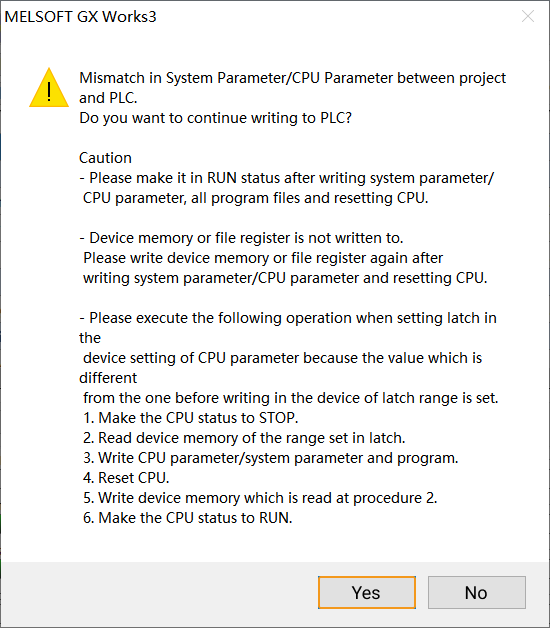
-
Si la sécurité du système peut être assurée, sélectionnez Oui.
-
Sélectionnez Oui pour tout pour « Êtes-vous sûr de vouloir l’écraser ? ».
-
Après un téléchargement réussi, un message d’alerte comme ci-dessous s’affichera. Si la sécurité du système peut être assurée, sélectionnez Oui.
-
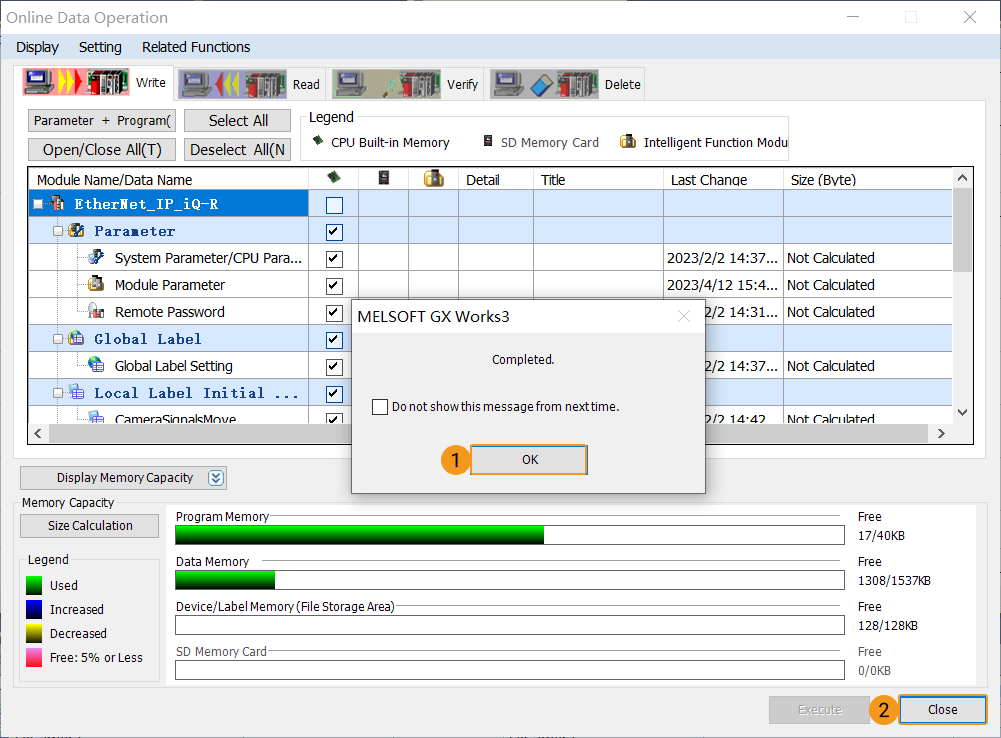
Cliquez sur OK dans la fenêtre Terminé. Retournez à la fenêtre Online Data Operation et cliquez sur Fermer.
-
-
Redémarrez le PLC pour que les configurations prennent effet.
Installer le fichier EDS et configurer la communication
Si vous configurez le logiciel pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
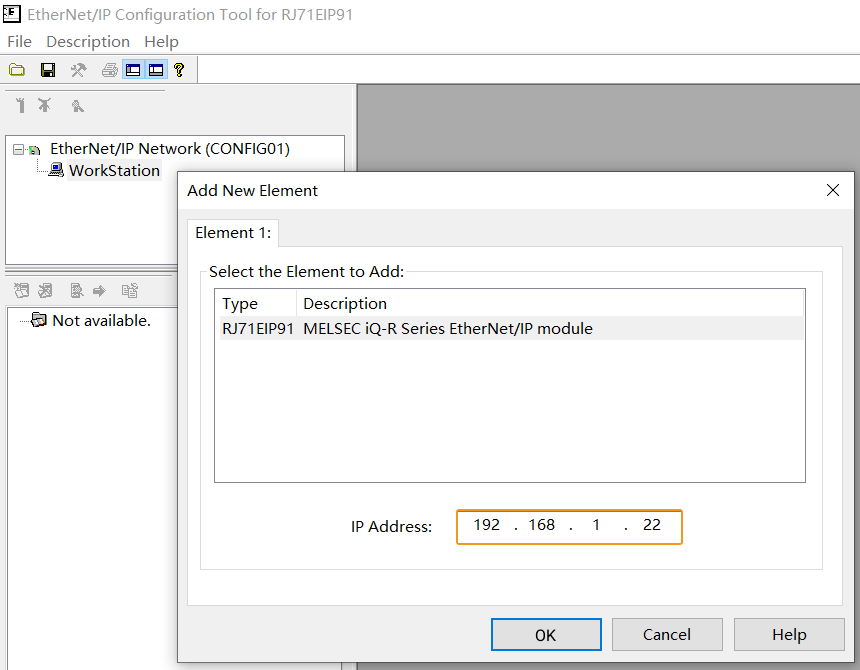
Retournez à la fenêtre 0000:RJ71EIP91 Module Parameter, double-cliquez sur l’icône EtherNet/IP Configuration Tool pour démarrer le logiciel de configuration EIP Configuration Tool for RJ71EIP91.
-
Une fenêtre Add New Element s’affiche, saisissez l’adresse IP du module RJ71EIP91, qui doit être identique à l’adresse IP du « paramètre de module 0000:RJ71EIP91 » défini dans GX Works3, puis cliquez sur OK.
-
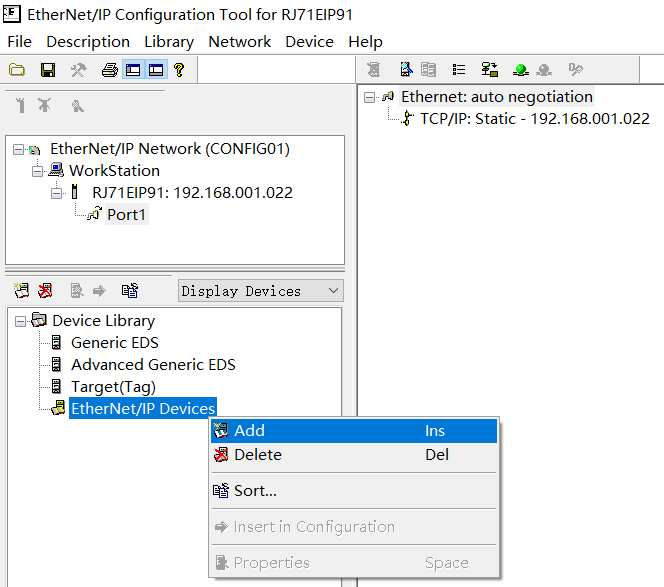
Dans la fenêtre EIP Configuration Tool for RJ71EIP91, développez Device Library, et sélectionnez EtherNet/IP Devices. Cliquez sur Add et une fenêtre EDS Management s’affichera.
-
Dans la fenêtre EDS Management, cliquez sur Suivant.
-
Cliquez sur Parcourir, et sélectionnez le fichier Software EIP.eds (qui doit être copié au préalable depuis l’IPC) dans la fenêtre contextuelle, puis cliquez sur Suivant.
Le fichier Software EIP.eds se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.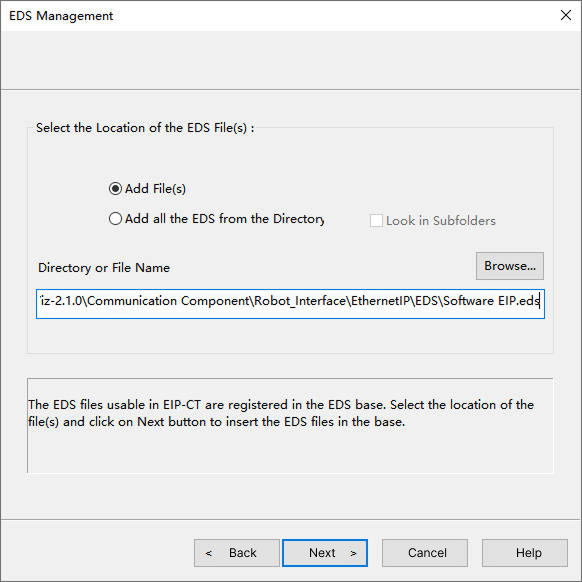
-
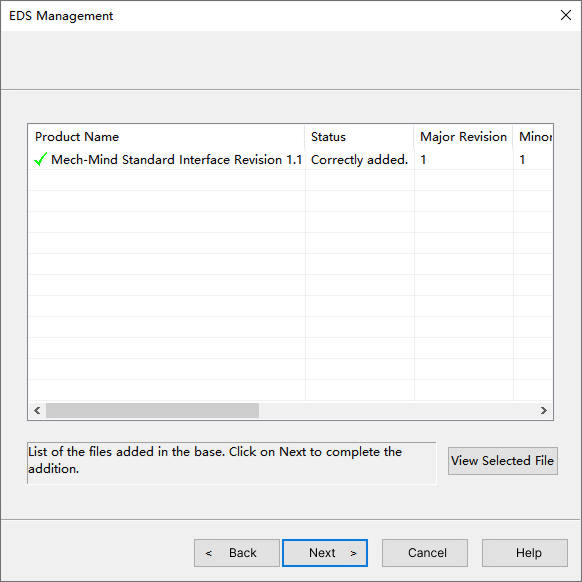
Cliquez sur Suivant.
-
Cliquez sur OK.
-
-
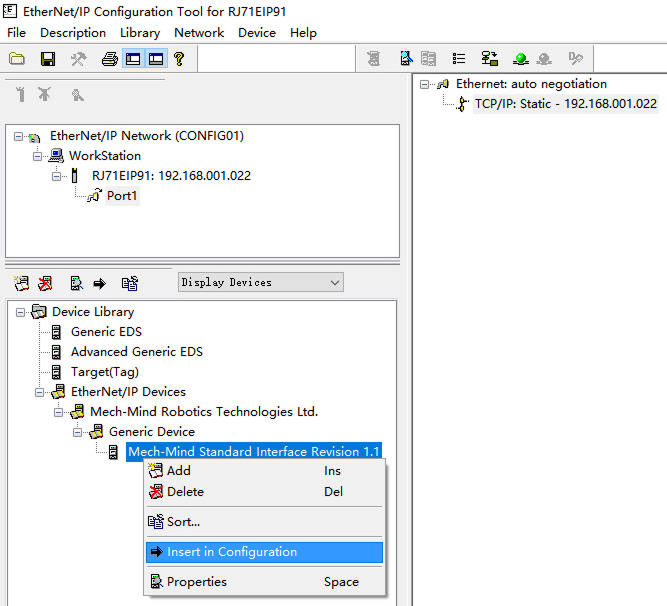
Après l’ajout réussi du fichier EDS, développez EtherNet/IP Devices/Mech-Mind Robotics Technologies Ltd./Generic Device, faites un clic droit sur Mech-Mind Standard Interface …, et cliquez sur Insert in Configuration pour se connecter au réseau EtherNet/IP. La fenêtre de configuration s’affichera.
-
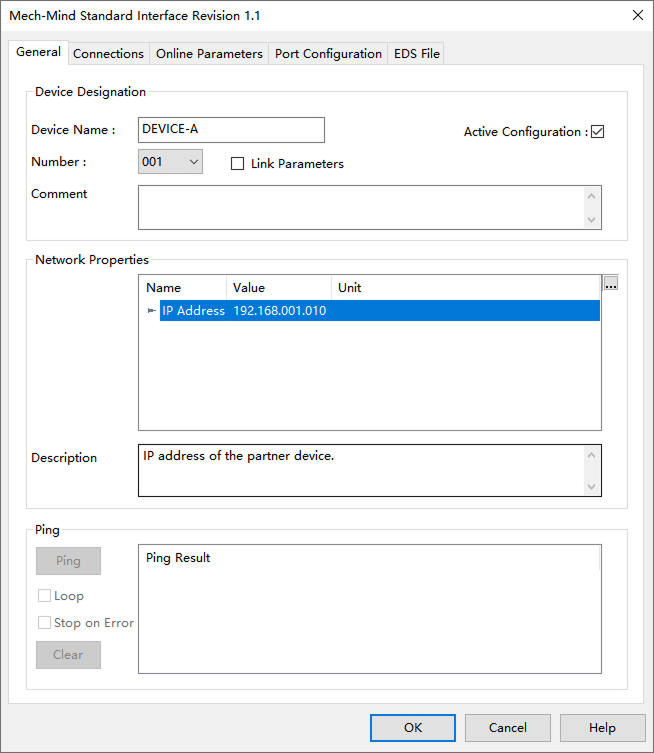
Dans l’onglet General, définissez l’adresse IP esclave du système de vision.
L’adresse IP ici doit être cohérente avec l’adresse IP sélectionnée sous*Network Adapters and IP Address* dans les paramètres de configuration de la communication robot dans Mech-Vision.
-
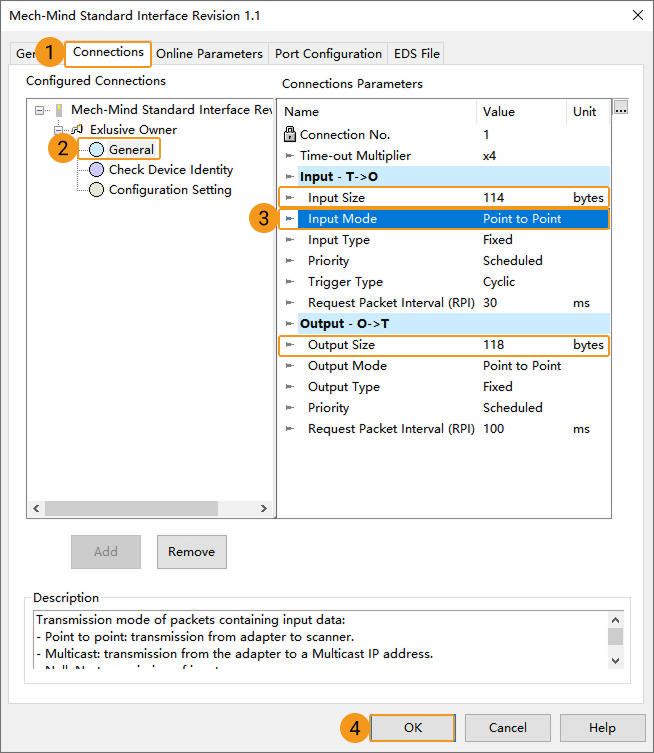
Dans l’onglet Connections, cliquez sur General, et changez la valeur de Input Mode en Point à point. Ensuite, notez les valeurs de Input Size et Output Size, puis cliquez sur OK.
-
Si vous utilisez une carte PCI-e pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Retournez à la fenêtre 0000:RJ71EIP91 Module Parameter, double-cliquez sur l’icône EtherNet/IP Configuration Tool pour démarrer le logiciel de configuration EIP Configuration Tool for RJ71EIP91.
-
Une fenêtre Add New Element s’affiche, saisissez l’adresse IP du module RJ71EIP91, qui doit être identique à l’adresse IP du « paramètre de module 0000:RJ71EIP91 » défini dans GX Works3, puis cliquez sur OK.
-
Dans la fenêtre EIP Configuration Tool for RJ71EIP91, développez Device Library, et sélectionnez EtherNet/IP Devices. Cliquez sur Add et une fenêtre EDS Management s’affichera.
-
Dans la fenêtre EDS Management, cliquez sur Suivant.
-
Cliquez sur Parcourir, et sélectionnez le fichier 005A002B003A0100.EDS (qui doit être copié au préalable depuis l’IPC) dans la fenêtre contextuelle, puis cliquez sur Suivant.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.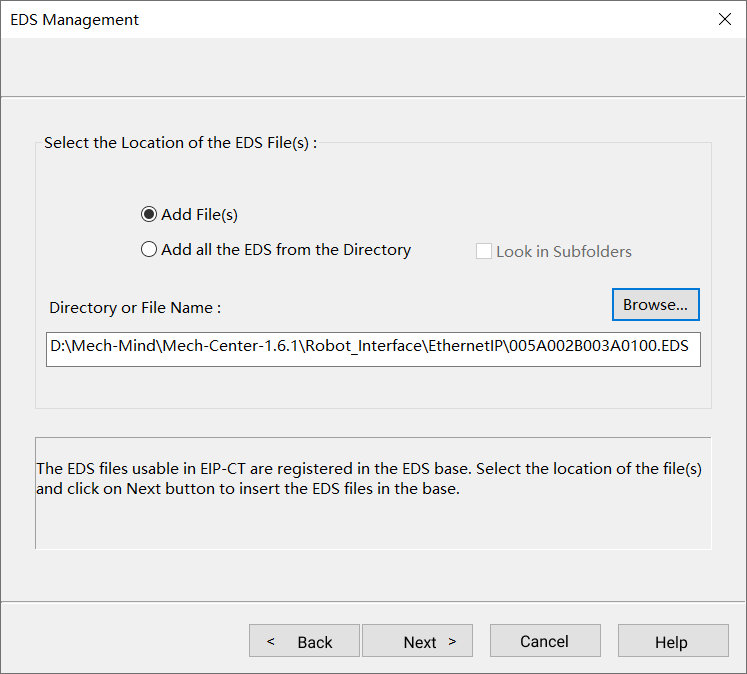
-
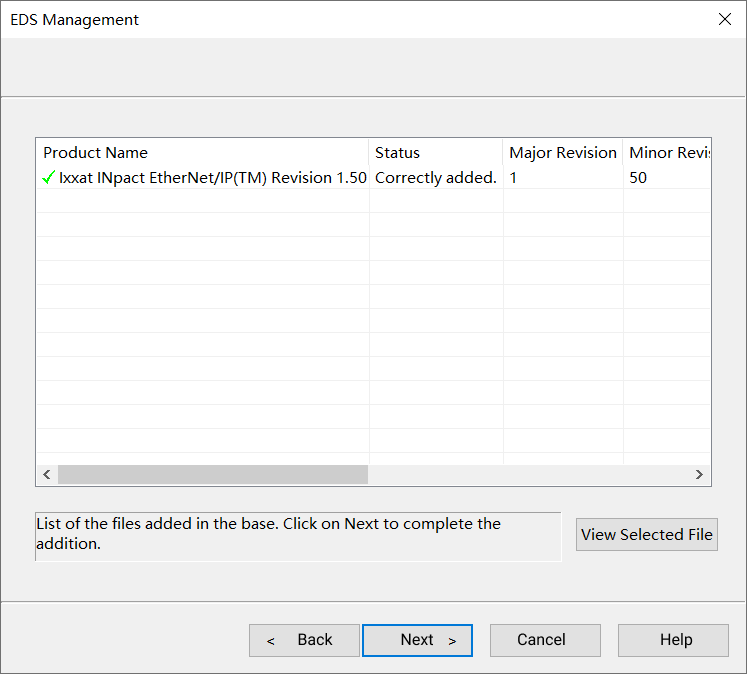
Cliquez sur Suivant.
-
Cliquez sur OK.
-
-
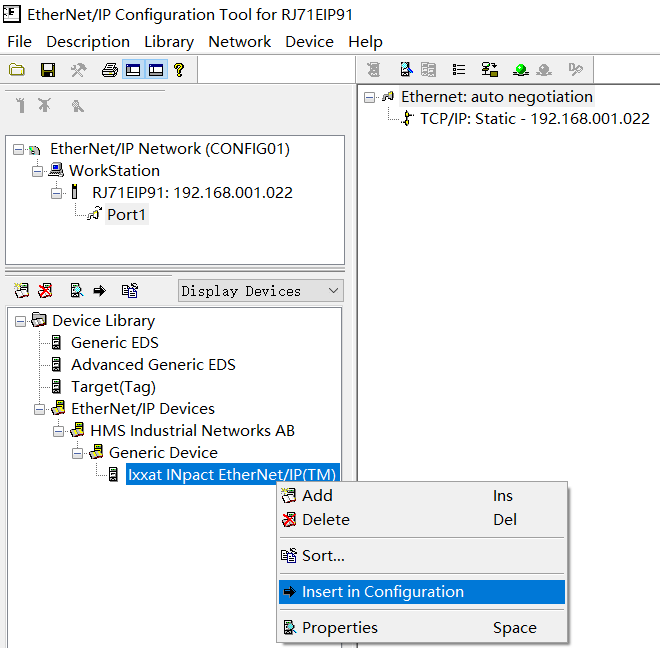
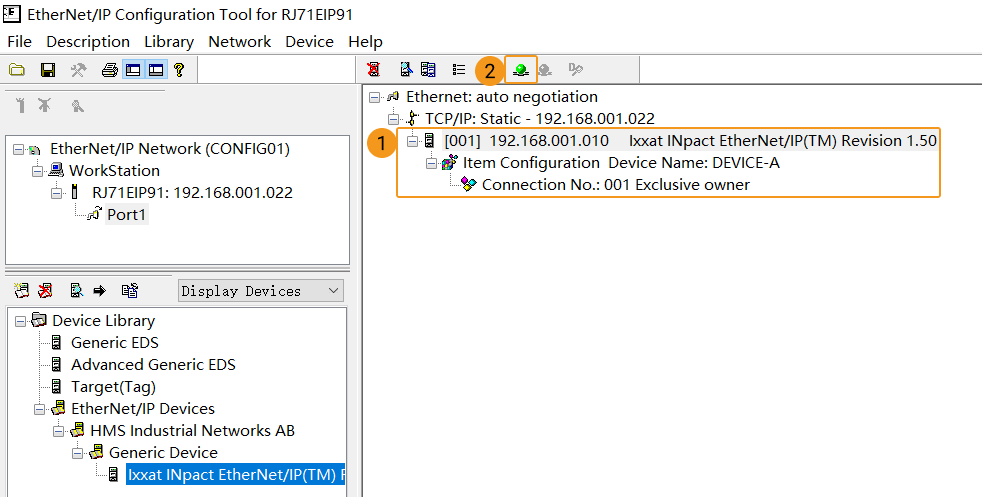
Après l’ajout réussi du fichier EDS, développez EtherNet/IP Devices/HMS Industrial Networks AB/Generic Device, faites un clic droit sur Ixxat INpact EtherNet/IP(TM), et cliquez sur Insert in Configuration pour se connecter au réseau EtherNet/IP. La fenêtre de configuration s’affichera.
-
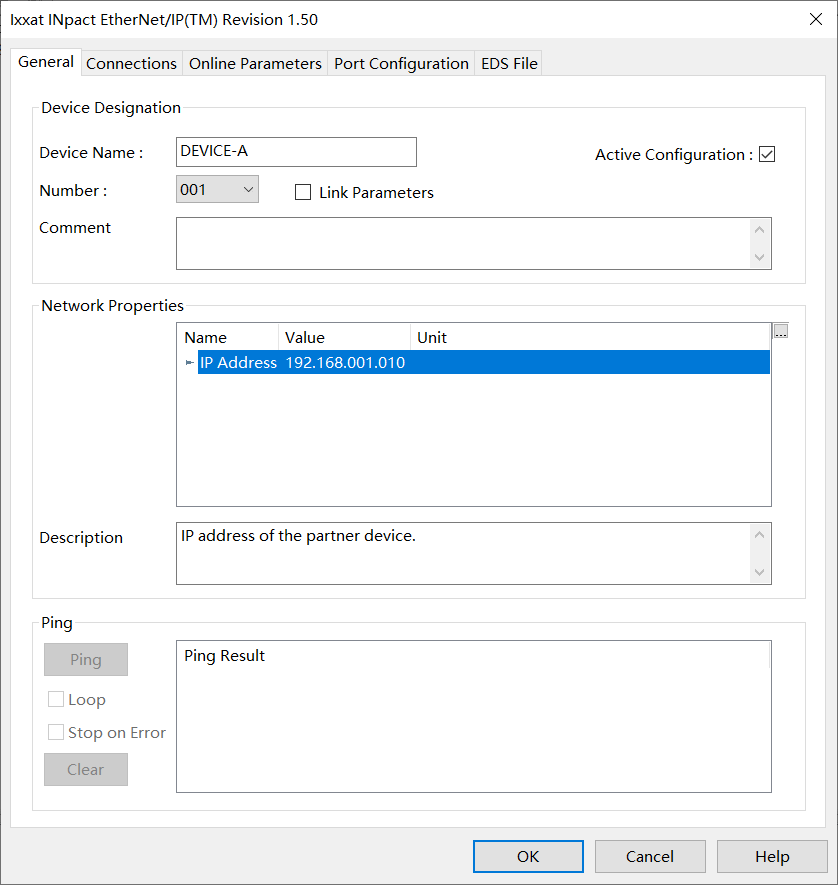
Dans l’onglet General, définissez l’adresse IP esclave du système de vision.
L’adresse IP ici doit être cohérente avec l’adresse IP définie dans HMS IPconfig.
-
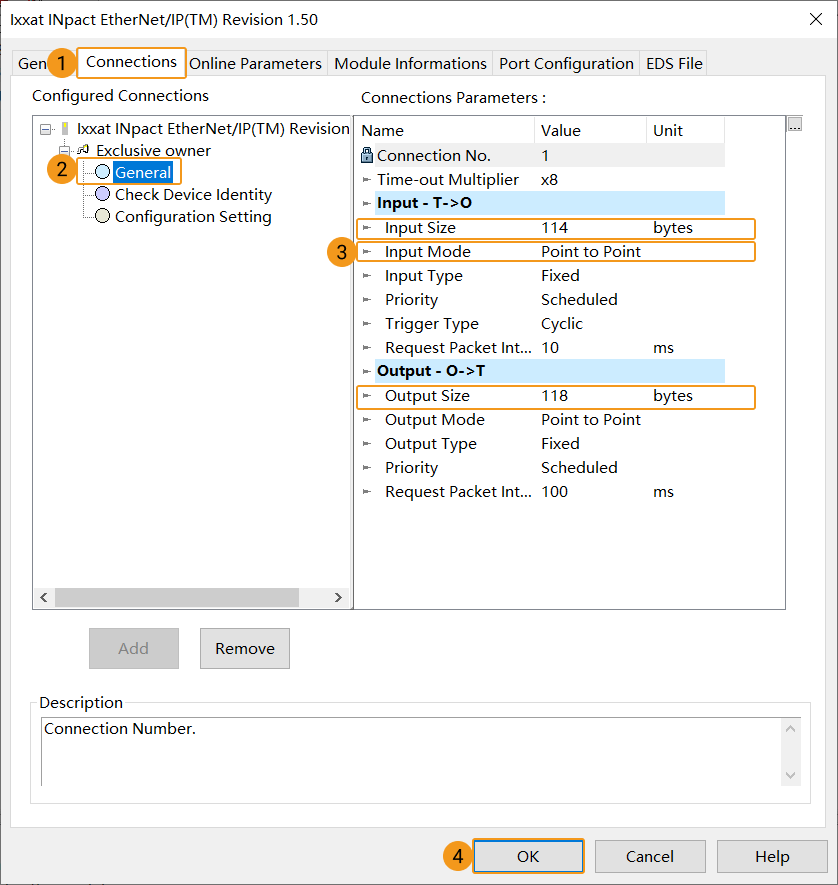
Dans l’onglet Connections, cliquez sur General, et changez la valeur de Input Mode en Point à point. Ensuite, notez les valeurs de Input Size et Output Size, puis cliquez sur OK.
-
Télécharger la configuration réseau EtherNet/IP du PLC vers le PLC
Si vous configurez le logiciel pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
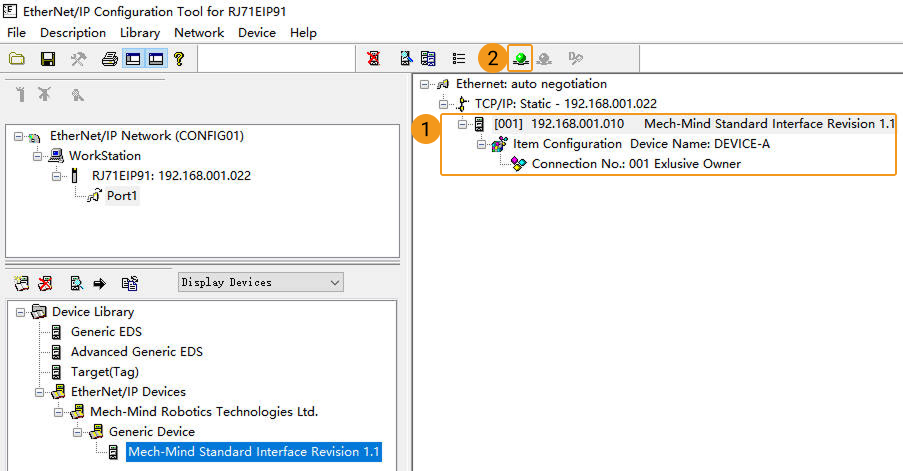
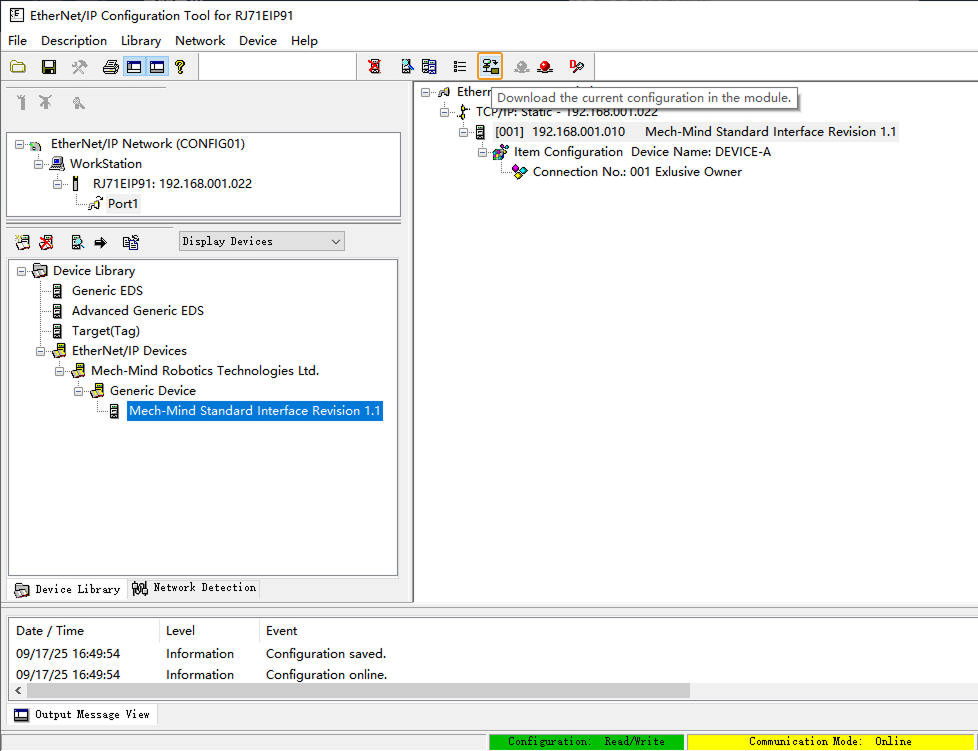
Si l’appareil est ajouté avec succès, l’option d’appareil comme ci-dessous apparaîtra dans la fenêtre. Cliquez sur l’icône Online command dans la barre d’outils.
-
Sélectionnez Oui pour « Voulez-vous enregistrer la configuration avant de passer en ligne ? » pour passer en mode en ligne.
-
En mode de communication Online, cliquez sur l’icône Download the current configuration in the module pour télécharger les paramètres actuels vers le module de communication EtherNet/IP RJ71EIP91.
-
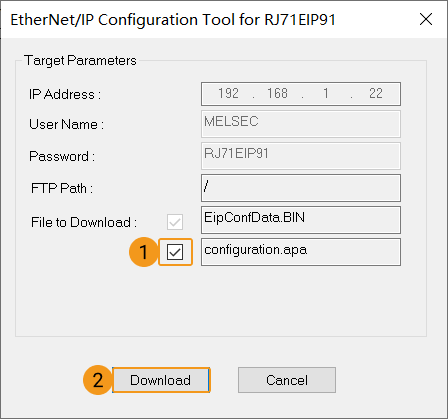
Sélectionnez configuration.apa dans la fenêtre contextuelle pour faciliter le téléchargement, le téléversement et l’édition du fichier de configuration avec l’extension .apa. Puis cliquez sur Télécharger.
-
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
-
-
Redémarrez le PLC pour que les configurations prennent effet.
Si vous utilisez une carte PCI-e pour mettre en place la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
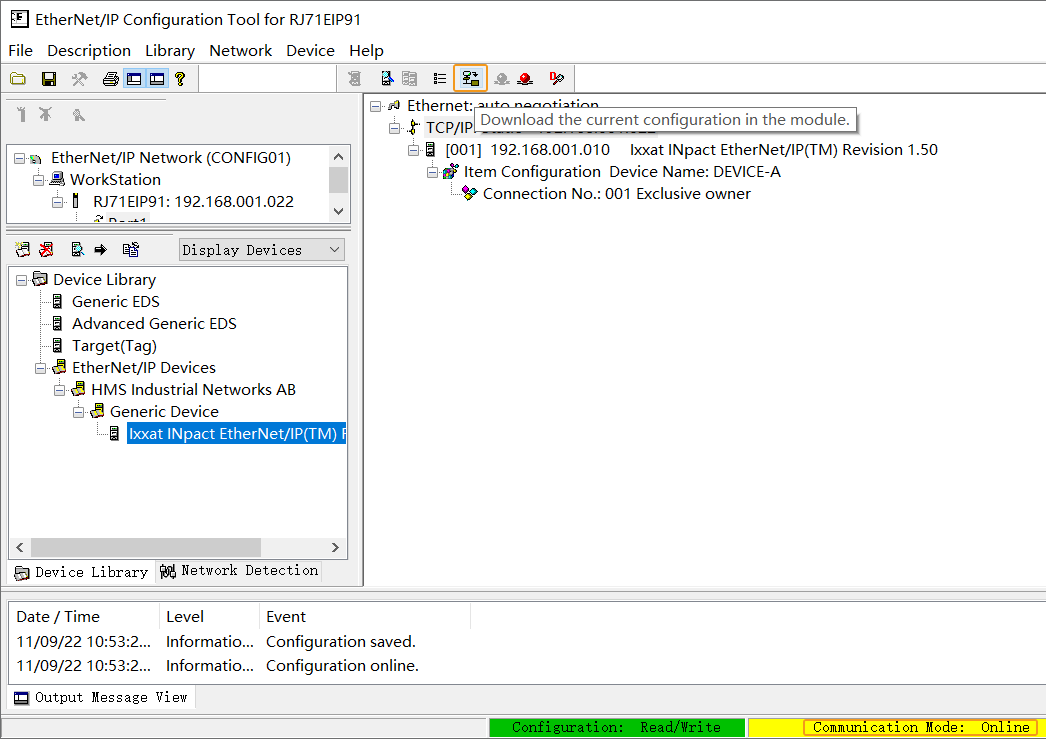
Si l’appareil est ajouté avec succès, l’option d’appareil comme ci-dessous apparaîtra dans la fenêtre. Cliquez sur l’icône Online command dans la barre d’outils.
-
Sélectionnez Oui pour « Voulez-vous enregistrer la configuration avant de passer en ligne ? » pour passer en mode en ligne.
-
En mode de communication Online, cliquez sur l’icône Download the current configuration in the module pour télécharger les paramètres actuels vers le module de communication EtherNet/IP RJ71EIP91.
-
Sélectionnez configuration.apa dans la fenêtre contextuelle pour faciliter le téléchargement, le téléversement et l’édition du fichier de configuration avec l’extension .apa. Puis cliquez sur Télécharger.
-
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
-
-
Redémarrez le PLC pour que les configurations prennent effet.
Importer le programme d’exemple et le télécharger vers le PLC
Importer les programmes d’exemple Mech-Mind
| Avant d’ajouter le programme d’exemple Mech-Mind à un projet déjà utilisé, il est recommandé de l’importer d’abord dans un nouveau projet et de le tester. |
-
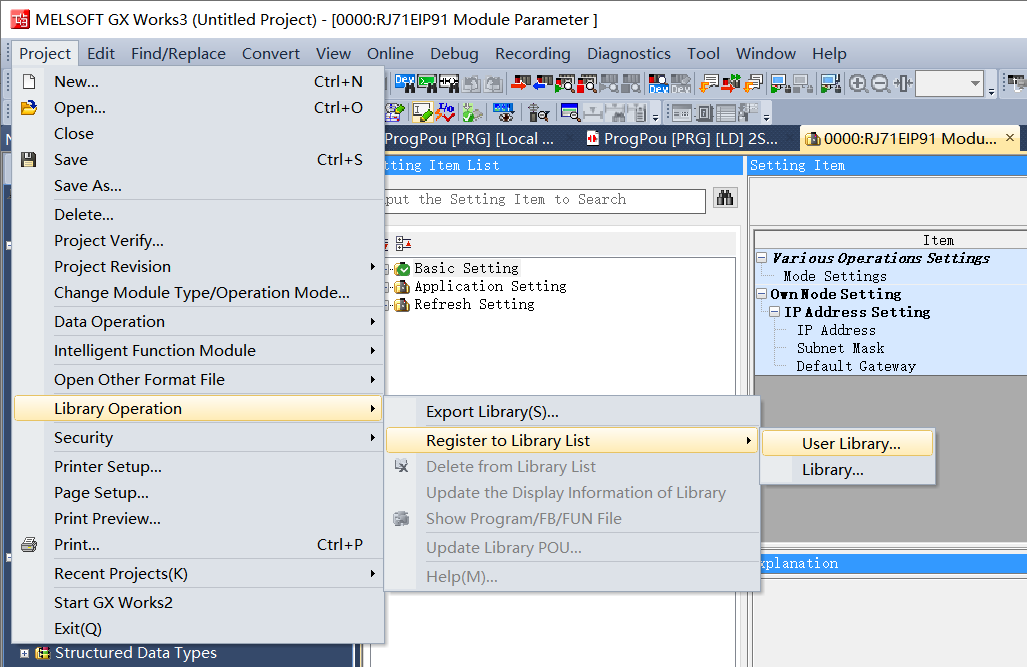
Retournez à l’interface principale de GX Works3. Sélectionnez .
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
-
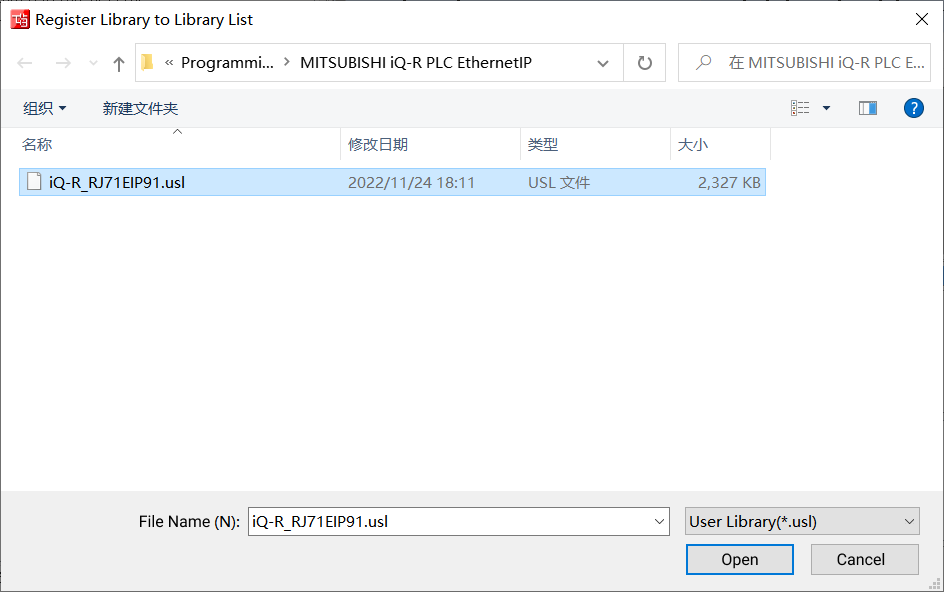
Dans la fenêtre Register Library to Library List, sélectionnez le fichier de programme d’exemple « iQ-R_RJ71EIP91.usl » et cliquez sur Ouvrir. Veuillez copier le fichier depuis l’IPC au préalable.
-
Retournez à la fenêtre du logiciel GX Works3, sélectionnez les deux fichiers de programme d’exemple « CameraSignalsMove » et « CameraTest » dans le panneau Element Selection à droite. Puis faites un clic droit sur les programmes d’exemple et sélectionnez .
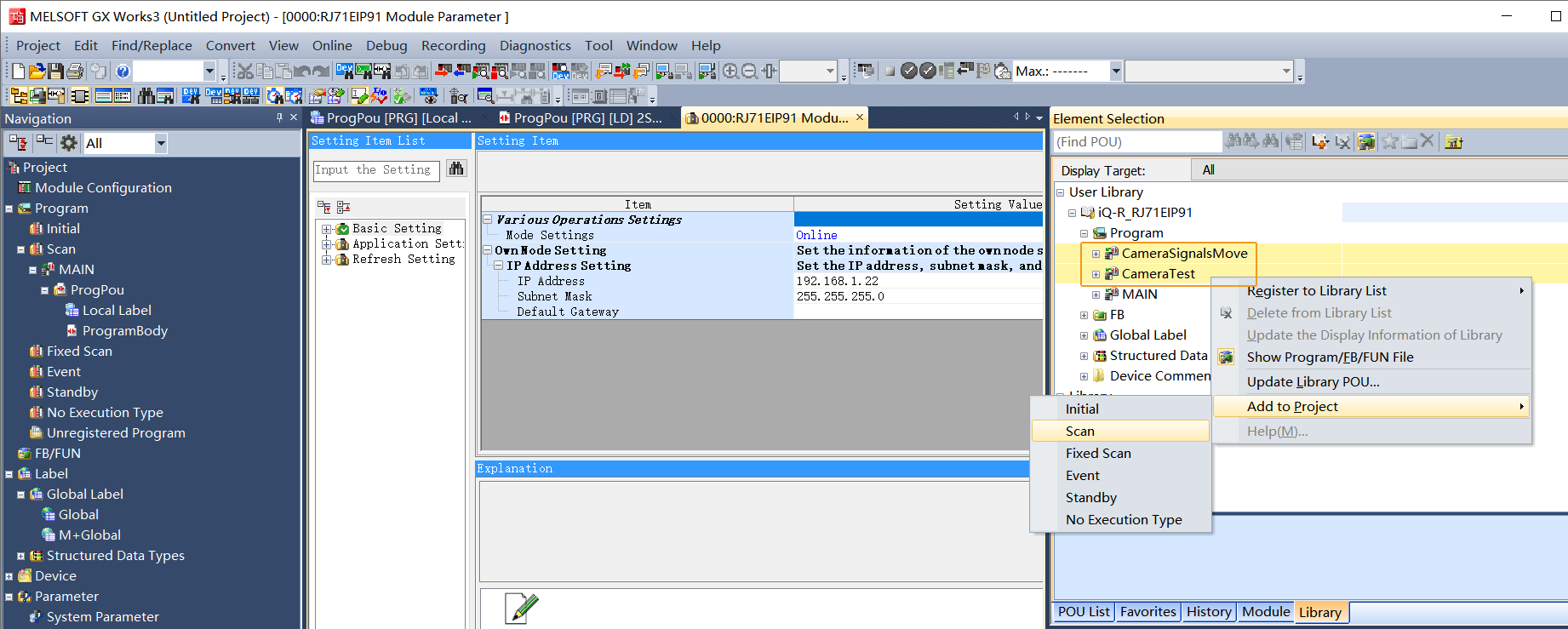
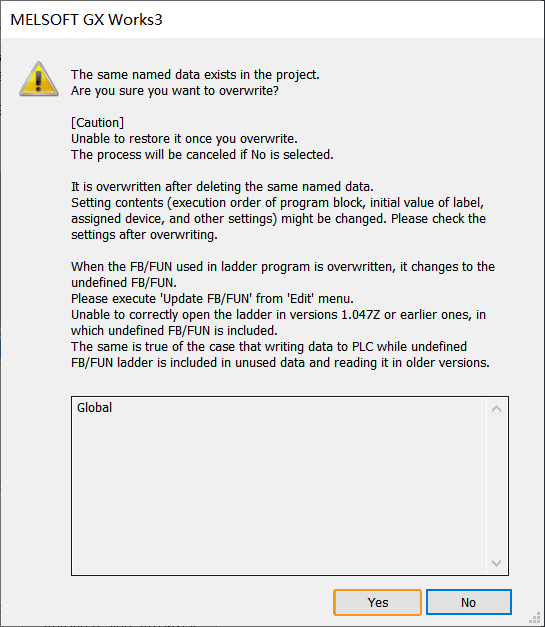
Cliquez sur Oui dans la fenêtre contextuelle comme indiqué ci-dessous.
-
Retournez à la fenêtre du logiciel GX Works3, vérifiez si les programmes d’exemple, les FB et les étiquettes ont été importés avec succès et apparaissent dans le panneau Project. Puis cliquez sur dans la barre de menus.
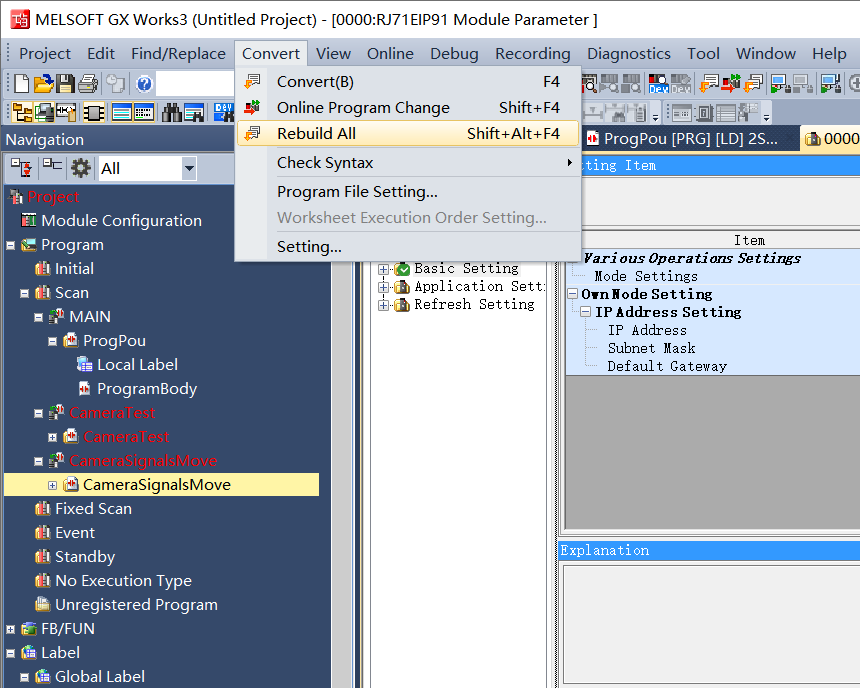
Cliquez sur OK dans la fenêtre contextuelle comme indiqué ci-dessous.
Télécharger le programme PLC vers le PLC
-
Après la conversion réussie du programme, cliquez sur dans la barre de menus.
-
Dans la fenêtre Online Data Operation, cliquez sur l’onglet Write, puis cliquez sur Paramètre + Programme, et ensuite sur Exécuter.
-
Cliquez sur Oui dans la fenêtre contextuelle comme indiqué ci-dessous.
-
Si la sécurité du système peut être assurée, sélectionnez Oui dans la fenêtre contextuelle comme indiqué ci-dessous.
-
Sélectionnez Oui pour tout pour « Êtes-vous sûr de vouloir l’écraser ? ».
-
Après un téléchargement réussi, un message d’alerte comme ci-dessous s’affichera. Si la sécurité du système peut être assurée, sélectionnez Oui.
-
Cliquez sur OK dans la fenêtre Terminé. Retournez à la fenêtre Online Data Operation et cliquez sur Fermer.
-
Vérifier la communication
-
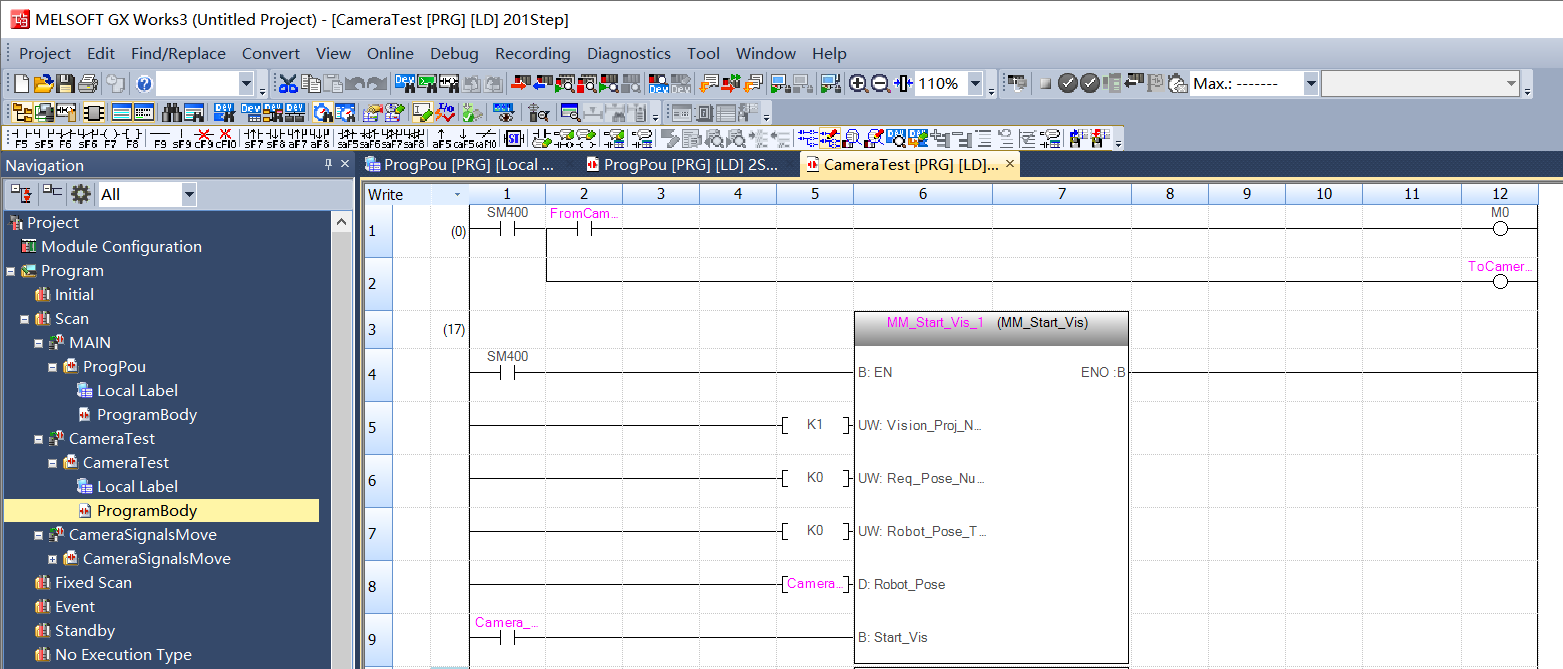
Retournez à la fenêtre du logiciel GX Works3, double-cliquez sur ProgramBody dans le panneau Navigation.
-
Sélectionnez dans la barre de menus.
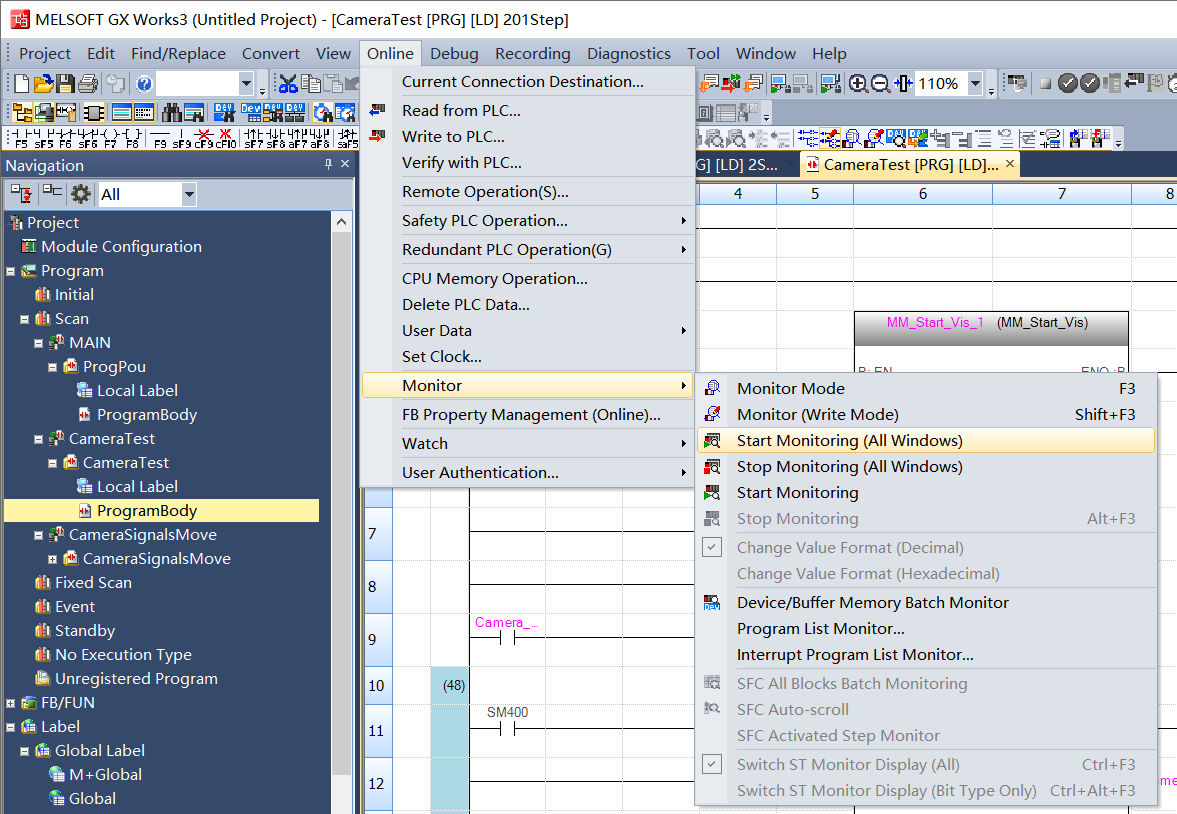
Si la connexion est établie avec succès, la valeur surveillée de FromCamera.HEARTBEAT continuera à changer.

-
La connexion du PLC est réussie si le message suivant s’affiche dans l’onglet Console du panneau Log de Mech-Vision : Connexion réussie au contrôleur ETHERNET IP. Si vous ne voyez pas ce message de log, veuillez vérifier :
-
Si le matériel est correctement connecté ;
-
Si le service d’interface a bien démarré dans Mech-Vision ;
-
Si le programme PLC a bien été téléchargé vers le PLC.
-
Tester avec un projet Mech-Vision/Mech-Viz
Cette section explique comment utiliser le FB de programme d’exemple pour déclencher le projet Mech-Vision afin d’obtenir des points de vision et déclencher le projet Mech-Viz afin d’obtenir la trajectoire planifiée.
Prérequis
-
Retournez à Mech-Vision et créez un projet Mech-Vision. Faites un clic droit sur la solution et sélectionnez Autoload Solution. Les projets dans la solution sont également chargés automatiquement. Parallèlement, le numéro de projet apparaîtra devant chaque nom de projet.
-
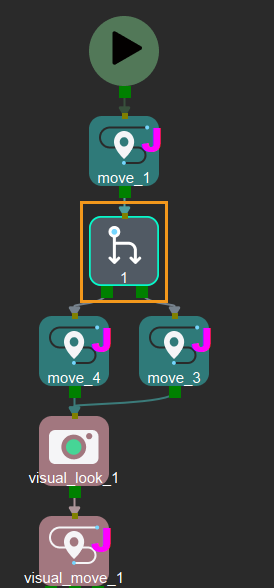
Créez un projet Mech-Viz. Faites un clic droit sur le nom du projet dans Resources de Mech-Viz et sélectionnez Autoload Project.
Le projet Mech-Viz utilisé pour le test doit contenir une étape « Branch by Msg » qui a été renommée en 1 comme illustré ci-dessous.
Exécuter le projet Mech-Vision et obtenir des points de vision
Configurer les programmes
-
Retournez à la fenêtre du logiciel GX Works3, double-cliquez sur le corps du programme de CameraTest, et définissez l’état de ToCamera.COMM_ENABLE sur toujours activé.

-
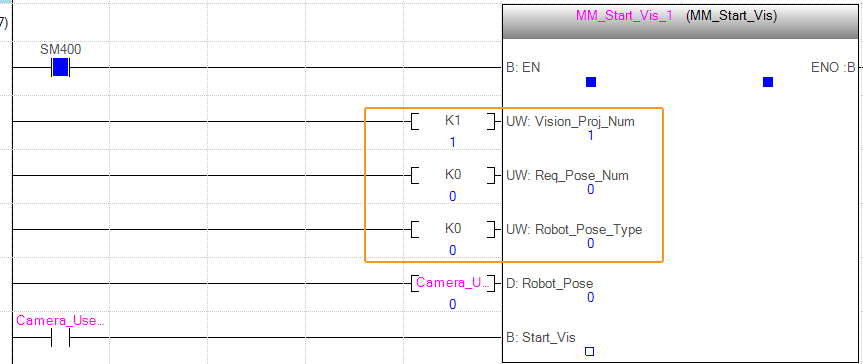
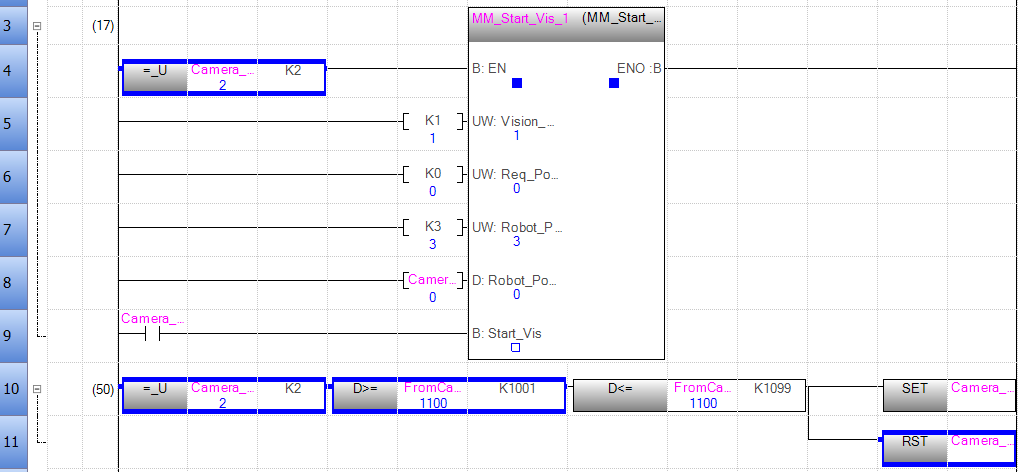
Cliquez sur le FB MM_Start_Vis et définissez les valeurs des entrées comme indiqué ci-dessous.
-
Définissez la valeur de Vision_Proj_Num sur 1, alors le projet n° 1 dans Mech-Vision sera démarré.
-
Définissez la valeur de Req_Pose_Num sur 0, ce qui signifie que le projet Mech-Vision enverra tous les points de vision.
-
Définir la valeur de Robot_Pose_Type à 0 indique que le projet est en mode œil-à-main, et que la pose de capture d’image n’est pas nécessaire.
-
Déclencher l’exécution du projet Mech-Vision
-
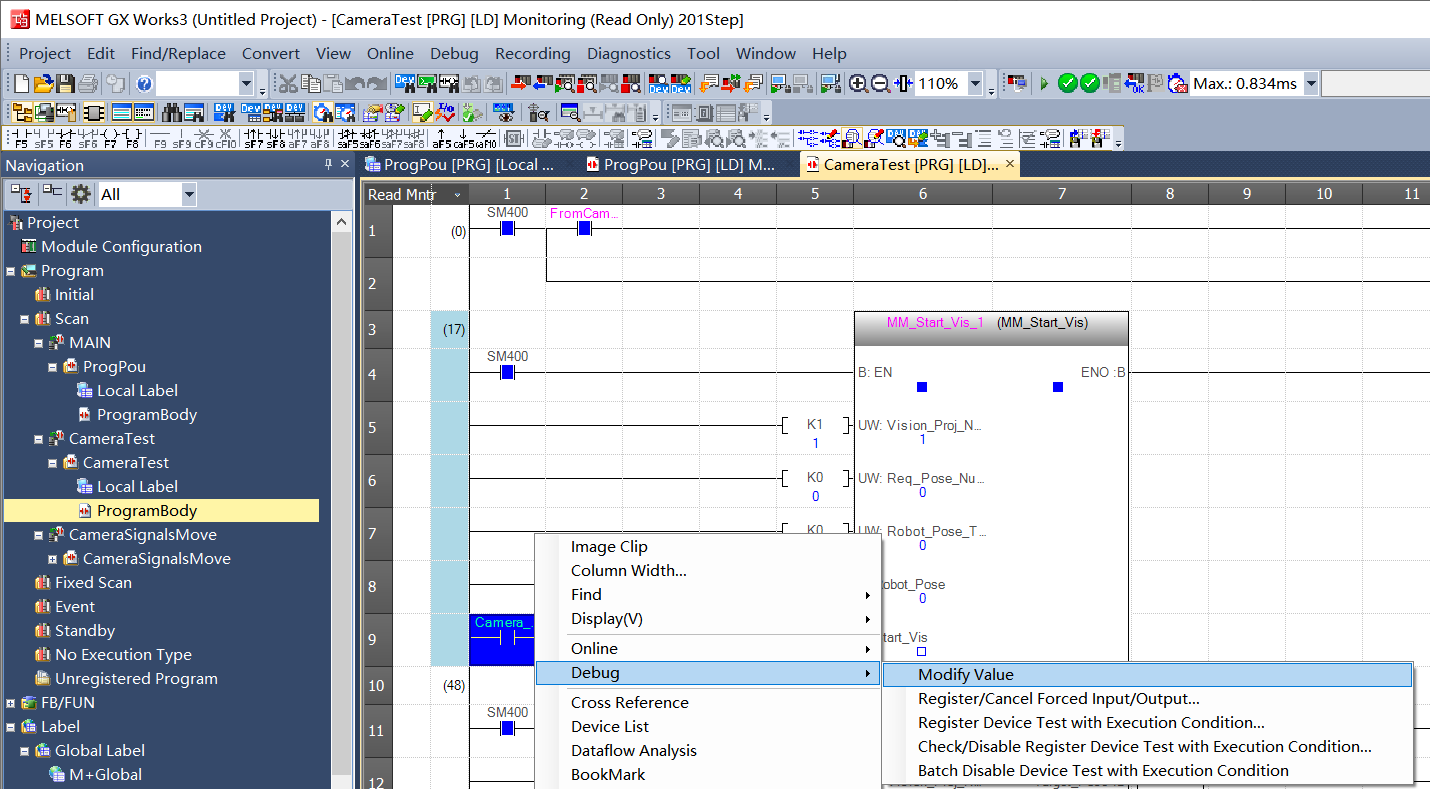
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Start_Vis côté entrée de MM_Start_Vis, sélectionnez et modifiez la valeur à 1 pour déclencher l’exécution du projet Mech-Vision. Puis réinitialisez la valeur à 0.
-
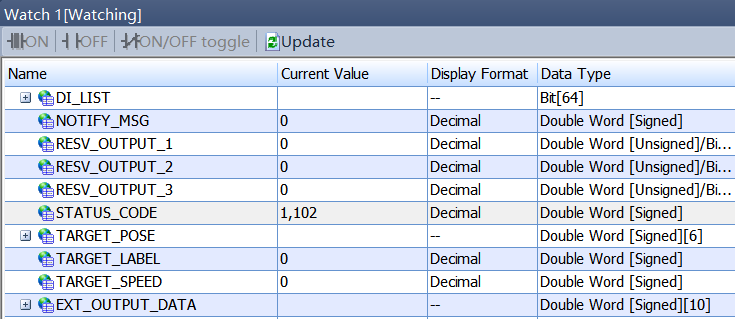
Vérifiez si la valeur renvoyée de STATUS_CODE est 1102.
-
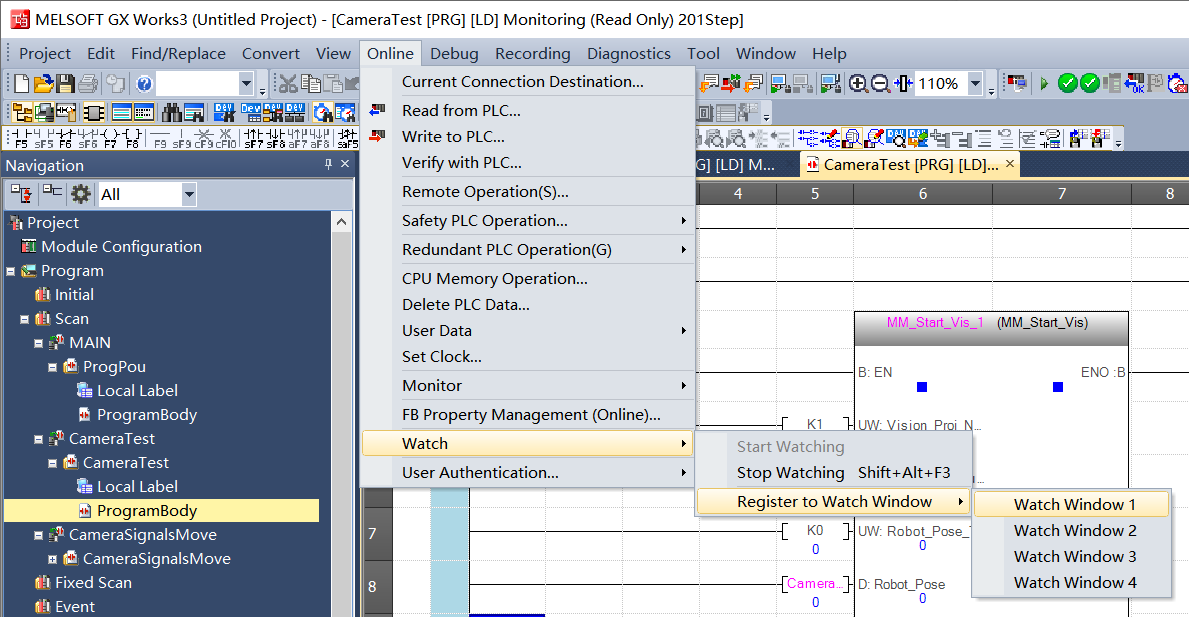
Sélectionnez dans la barre de menus.
-
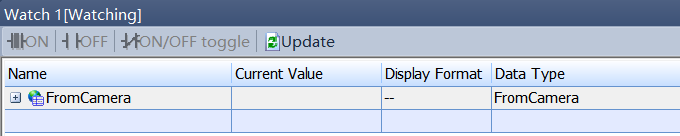
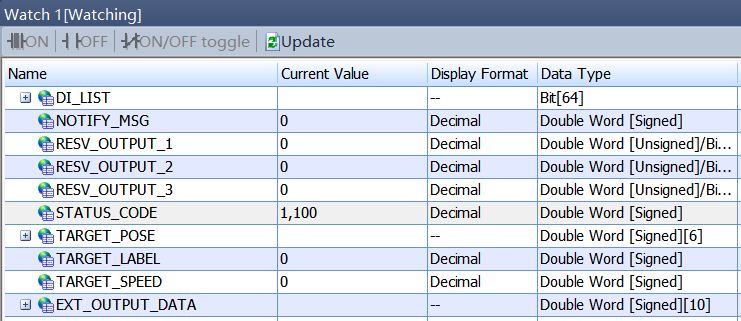
Dans la fenêtre Watch 1, trouvez l’étiquette FromCamera dans la colonne Nom.
-
Développez les niveaux et vérifiez la valeur renvoyée de STATUS_CODE.
-
| Si le projet Mech-Vision démarre avec succès, le code d’état 1102 sera renvoyé. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Status Codes and Troubleshooting pour le dépannage. |
Obtenir des points de vision depuis Mech-Vision
-
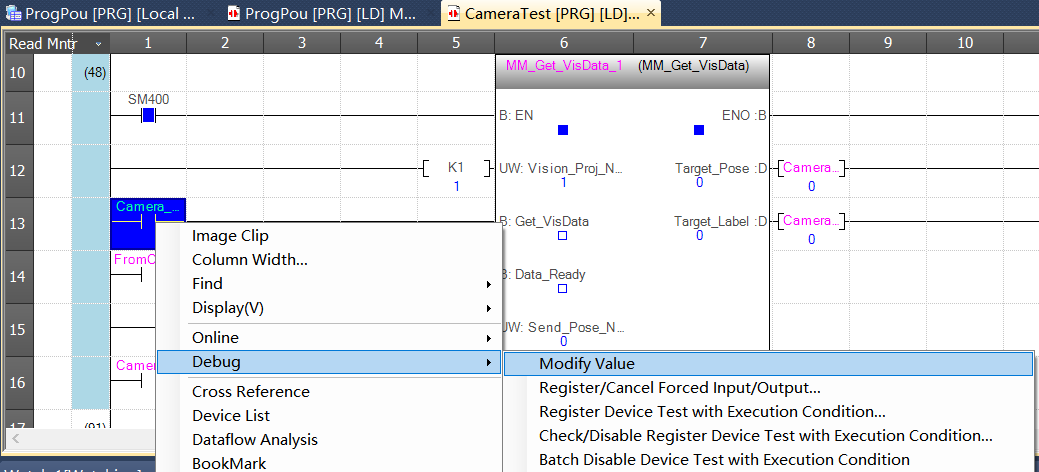
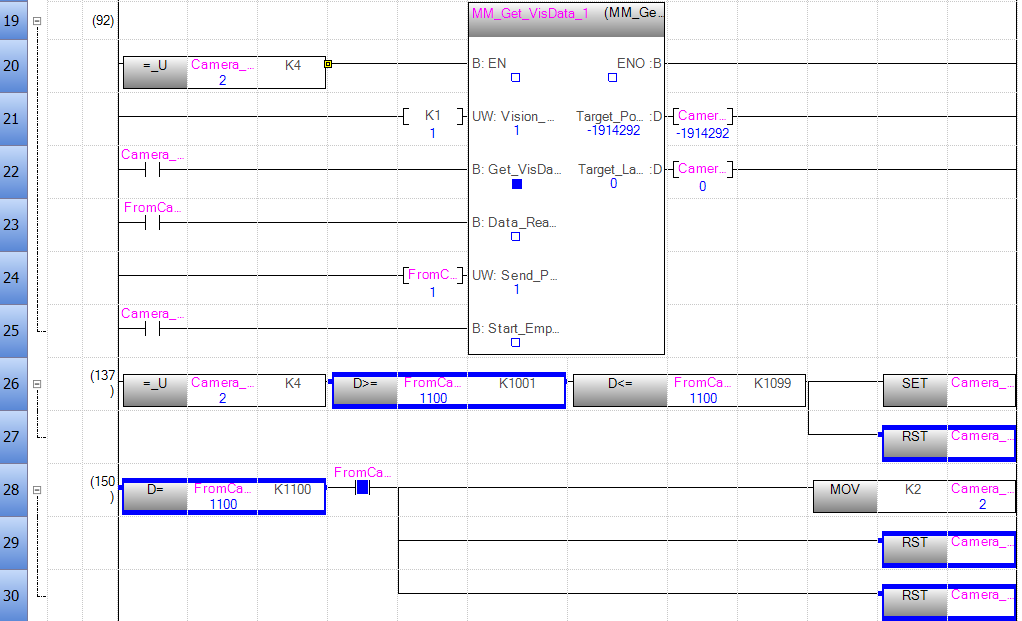
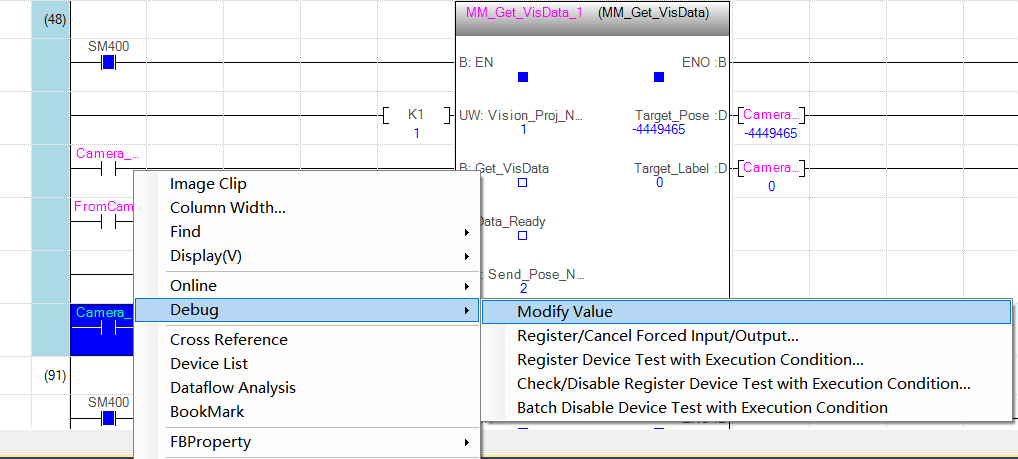
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Get_VisData côté entrée de MM_Get_VisData, sélectionnez et modifiez la valeur à 1 pour obtenir les points de vision depuis Mech-Vision. Puis réinitialisez la valeur à 0.
-
Vérifiez la valeur renvoyée de STATUS_CODE dans la Fenêtre d’observation 1.
Si les points de vision sont obtenus avec succès depuis Mech-Vision, le code d’état 1100 sera renvoyé. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Status Codes and Troubleshooting pour le dépannage. -
Vérifiez la valeur renvoyée de Target_Pose.
-
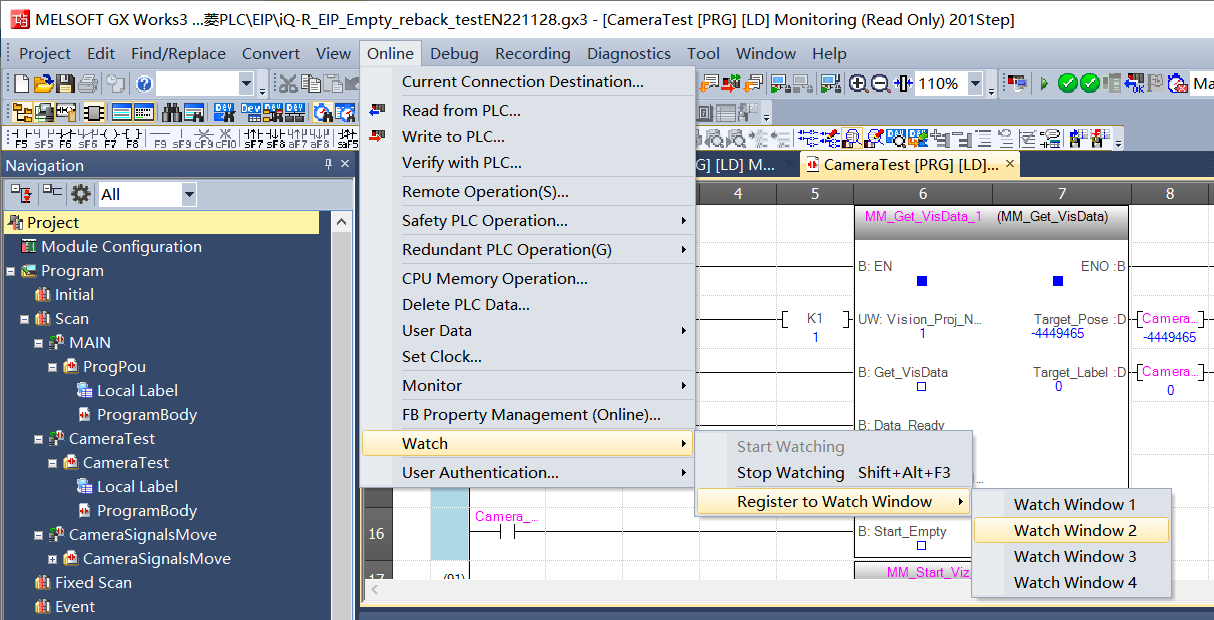
Sélectionnez dans la barre de menus.
-
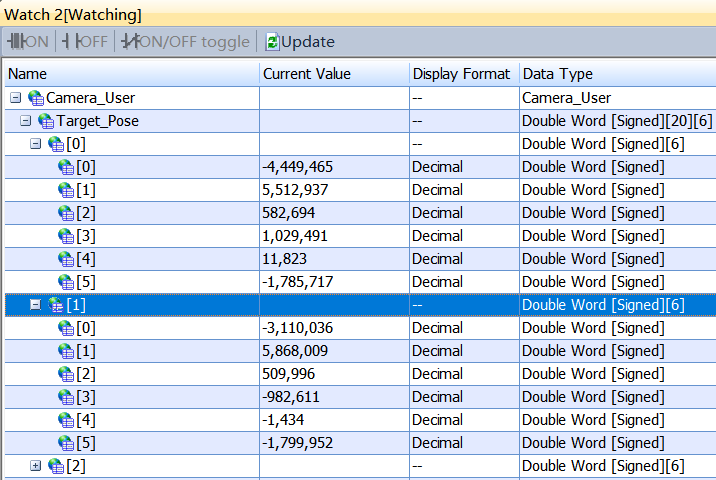
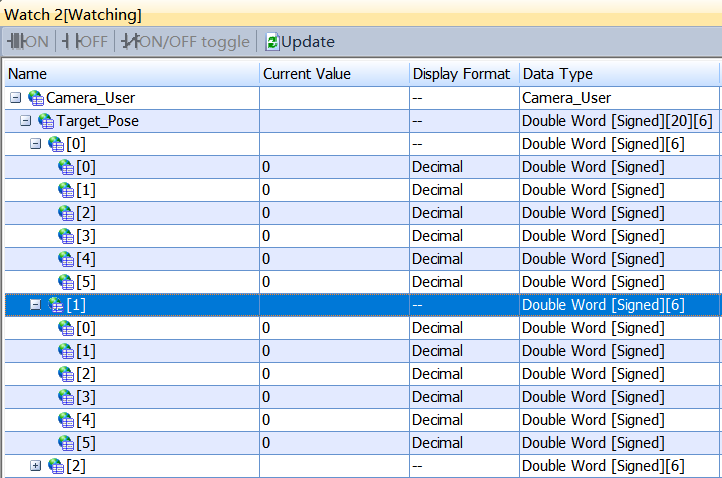
Dans la fenêtre Watch 2, trouvez l’étiquette Camera_User dans la colonne Nom.
-
Développez les niveaux et vérifiez les valeurs renvoyées de Target_Pose. L’exemple de la figure ci-dessous a reçu 2 poses. Divisez les valeurs transférées par 10000 pour obtenir les données de pose réelles.
-
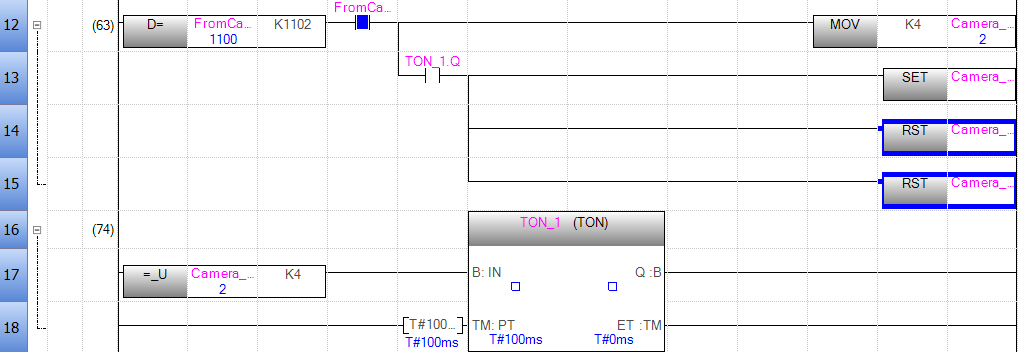
Automatiser le processus d’obtention du résultat de vision depuis Mech-Vision
La section précédente explique comment obtenir manuellement le résultat de vision depuis Mech-Vision. Pour automatiser le processus d’obtention du résultat de vision depuis Mech-Vision, connectez les programmes comme dans l’exemple suivant.
Obtenir la trajectoire planifiée depuis Mech-Viz
Configurer les programmes
-
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Start_Empty côté entrée de MM_Get_VisData, sélectionnez et modifiez la valeur à 1 pour effacer le résultat de vision précédemment obtenu. Puis réinitialisez la valeur à 0.
Vérifiez la valeur de Target_Pose après l’effacement du résultat de vision dans la Fenêtre d’observation 2.
-
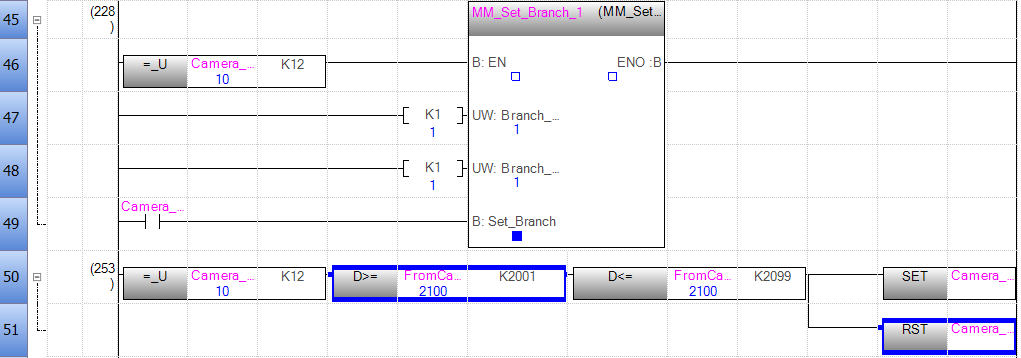
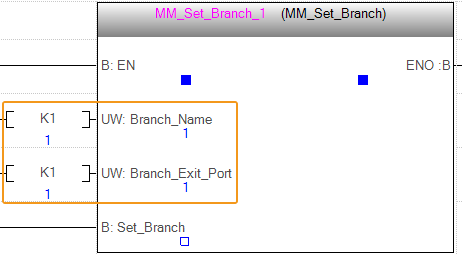
Cliquez sur le FB MM_Set_Branch et définissez les valeurs d’entrée comme indiqué ci-dessous.
-
Définissez la valeur de Branch_Name sur 1, et le projet s’exécutera le long de l’étape Branch by Msg dont l’ID d’étape est 1.
-
Définissez la valeur de Branch_Exit_Port sur 1, et Mech-Viz prendra le port de sortie 1 pour l’étape Branch by Msg dont l’ID d’étape est 1.
-
-
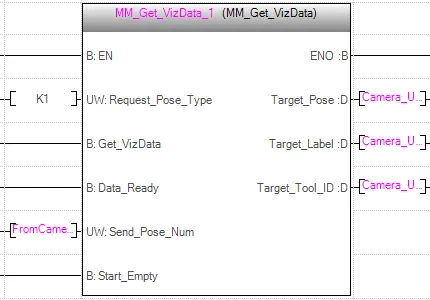
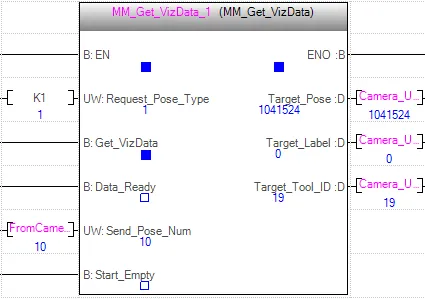
Cliquez sur MM_Get_VizData, définissez la valeur de Request_Pose_Type sur 1, et Mech-Viz enverra des données en positions articulaires.
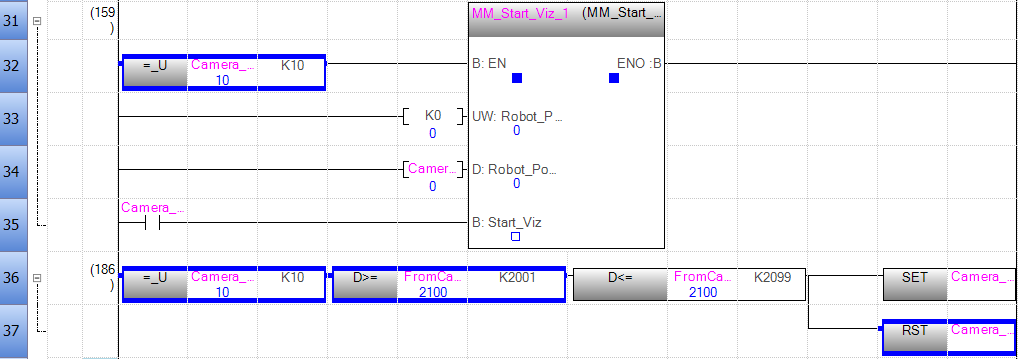
Déclencher l’exécution du projet Mech-Viz
-
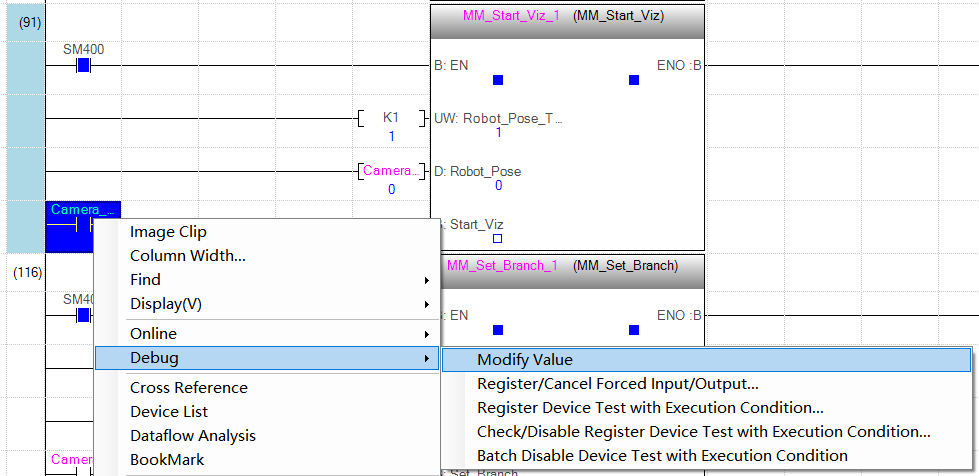
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Start_Viz côté entrée de MM_Start_Viz, sélectionnez et modifiez la valeur à 1 pour déclencher l’exécution du projet Mech-Viz. Puis réinitialisez la valeur à 0.
-
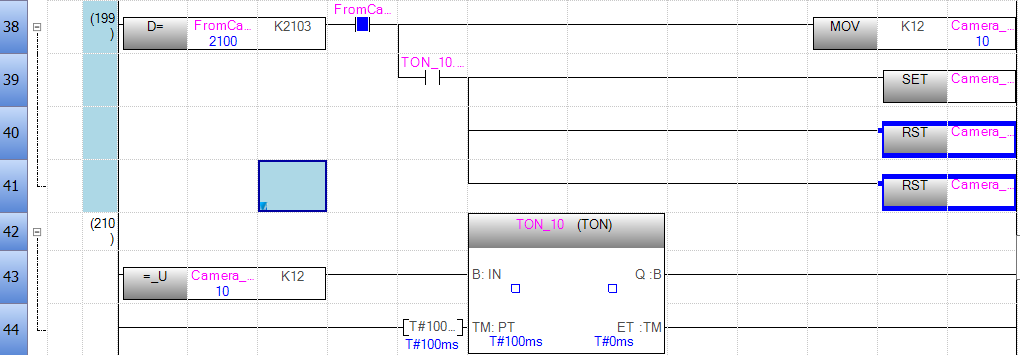
Vérifiez la valeur renvoyée de STATUS_CODE dans la Fenêtre d’observation 1.
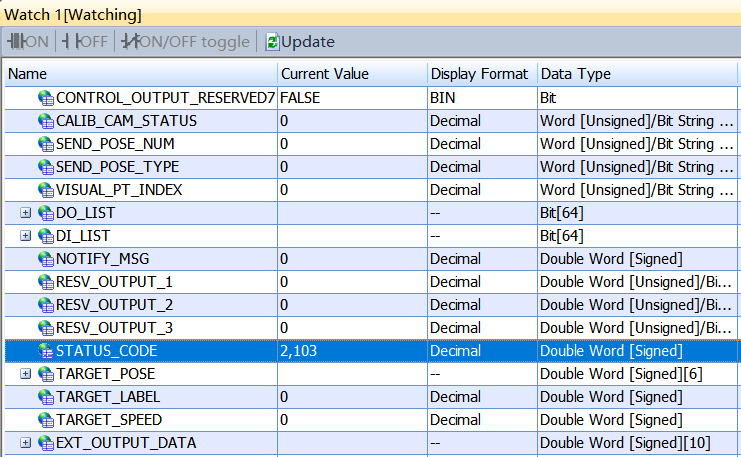
| Si le projet Mech-Viz démarre avec succès, le code d’état 2103 sera renvoyé. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Status Codes and Troubleshooting pour le dépannage. |
Définir le port de sortie de branche de Mech-Viz
-
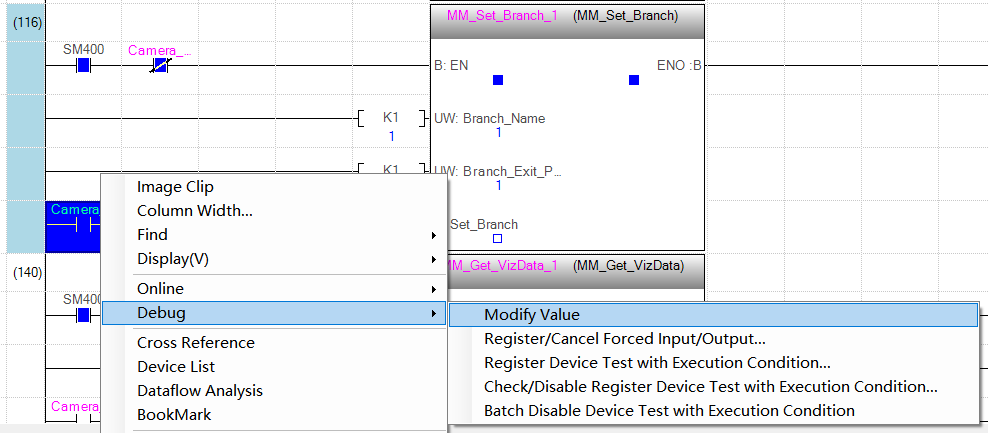
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Set_Branch côté entrée de MM_Set_Branch, sélectionnez et modifiez la valeur à 1 pour sélectionner le port de sortie de la branche. Puis réinitialisez la valeur à 0.
-
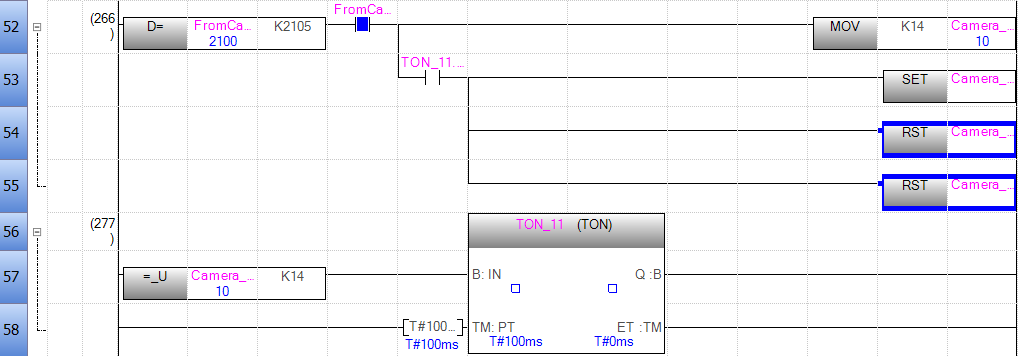
Vérifiez la valeur renvoyée de STATUS_CODE dans la Fenêtre d’observation 1.
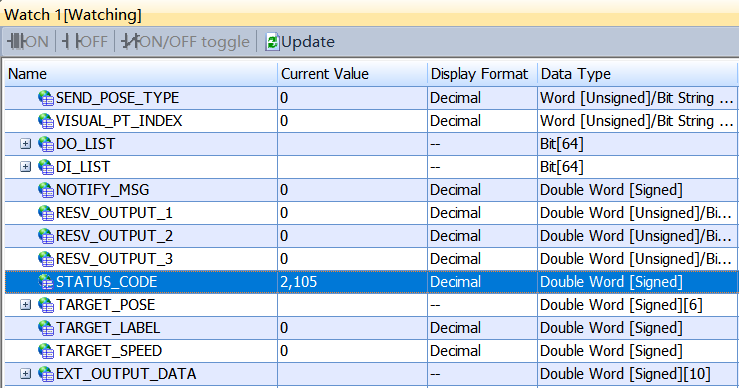
Si la branche est définie avec succès, le code d’état 2105 sera renvoyé. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Status Codes and Troubleshooting pour le dépannage.
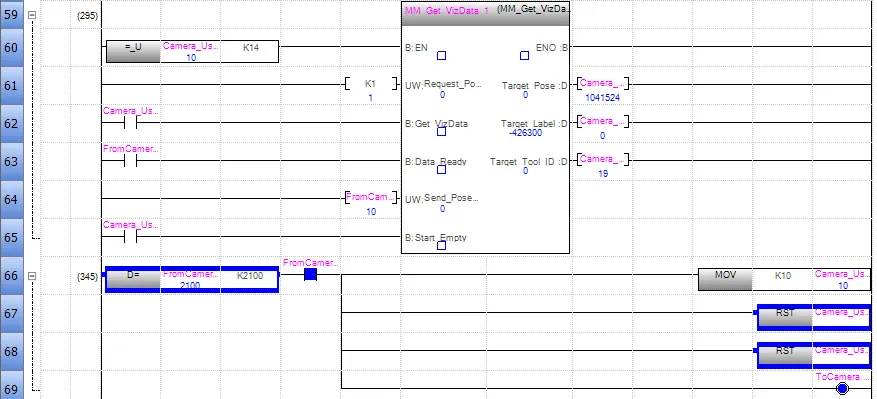
Obtenir la trajectoire planifiée depuis Mech-Viz
-
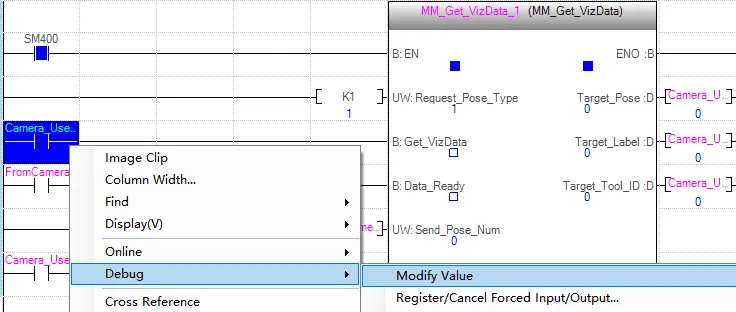
Dans la fenêtre de GX Works3, faites un clic droit sur l’étiquette Camera_User.Get_VizData côté entrée de MM_Get_VizData, sélectionnez et modifiez la valeur à 1 pour obtenir la trajectoire planifiée depuis Mech-Viz. Puis réinitialisez la valeur à 0.
-
Vérifiez la valeur renvoyée de STATUS_CODE dans la Fenêtre d’observation 1.
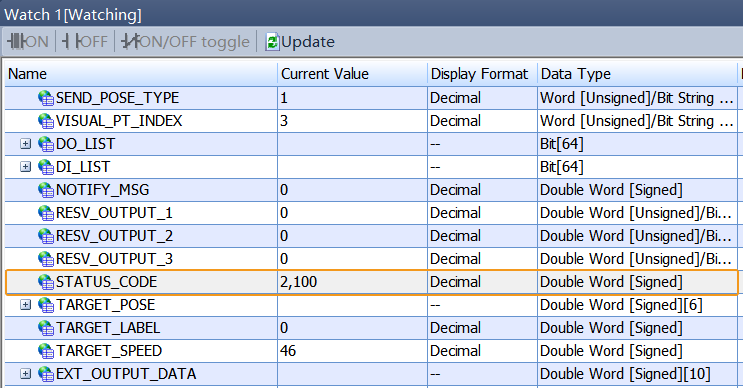
Si la trajectoire planifiée est obtenue avec succès, le code d’état 2100 sera renvoyé. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Status Codes and Troubleshooting pour le dépannage. -
Cliquez sur MM_Get_VizData et vous pouvez voir que la valeur de Send_Pose_Num est 10, ce qui indique que 10 ensembles de positions articulaires sont obtenus dans ce programme d’exemple.
-
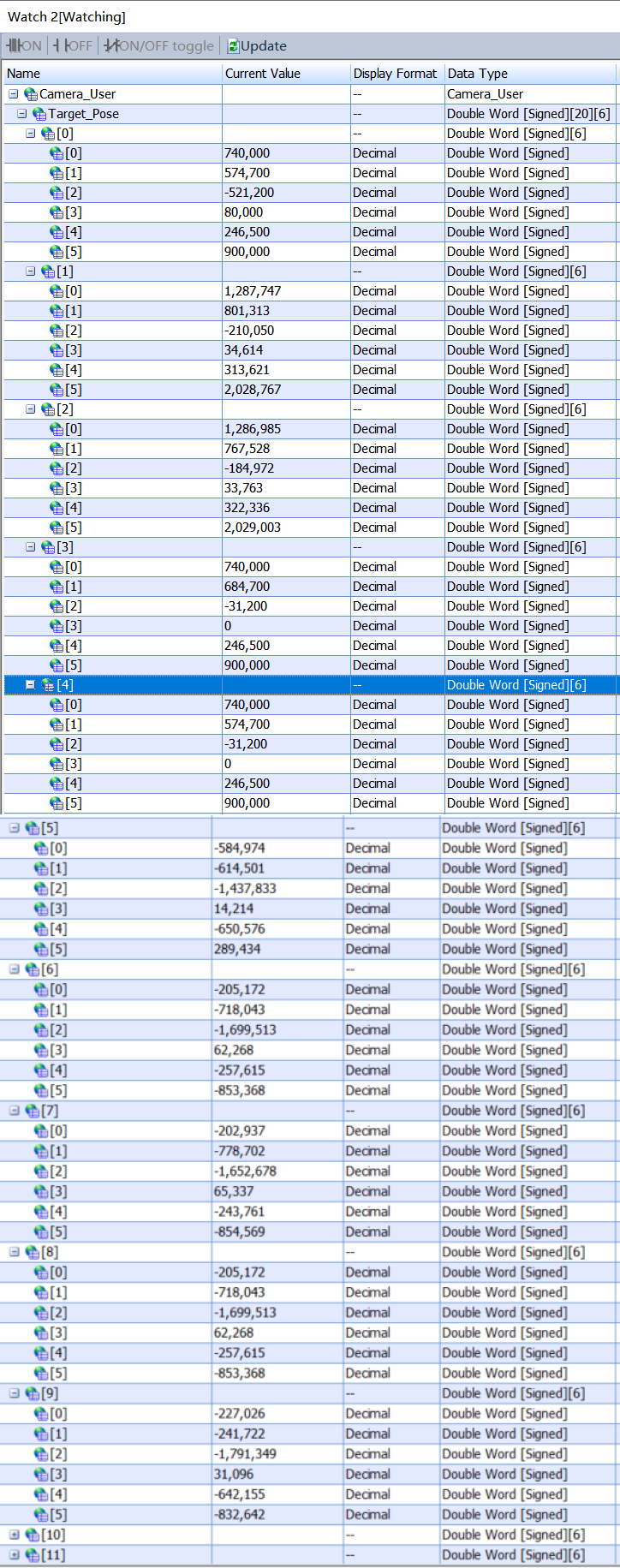
Vérifiez les valeurs renvoyées de Target_Pose dans la Fenêtre d’observation 2. Divisez les valeurs transférées par 10000 pour obtenir les données de pose réelles.
Automatiser le processus d’obtention de la trajectoire planifiée depuis Mech-Viz
La section précédente explique comment obtenir manuellement la trajectoire planifiée depuis Mech-Viz. Pour automatiser le processus d’obtention de la trajectoire planifiée depuis Mech-Viz, connectez les programmes comme dans l’exemple suivant.