Configuration de la communication et utilisation du programme d’exemple
Ce sujet présente deux méthodes pour configurer la communication de l’Interface standard basée sur le protocole EtherNet/IP entre un automate Allen‑Bradley (ci‑après dénommé AB PLC) et le système de vision Mech-Mind.
-
Utiliser une carte PCI‑e.
-
Configurer le logiciel. Aucune carte requise.
|
Exigences matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
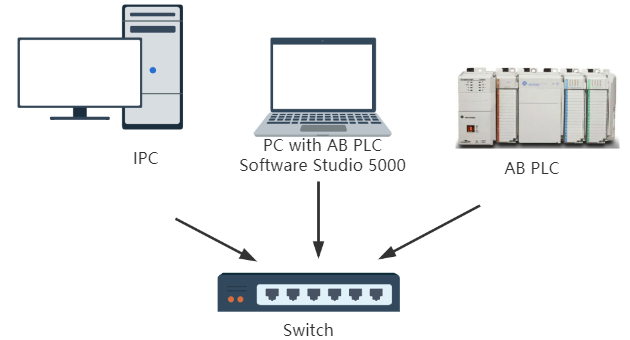
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les réglages de connexion matérielle.
-
AB PLC : Un automate modulaire 1769‑L19ER‑BB1B est utilisé comme exemple dans les instructions suivantes.
-
Adaptateur d’alimentation : AC 220 V vers DC 24 V
-
IPC
-
Commutateur réseau et câbles Ethernet
La connexion matérielle est la suivante. Chaque appareil a une adresse IP unique, mais tous doivent être dans le même sous-réseau et ne pas être utilisés par d’autres appareils. Pour les paramètres d’adresse IP du PLC, veuillez vous référer à la section ci‑dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur avec Studio 5000 installé, voir ce lien.
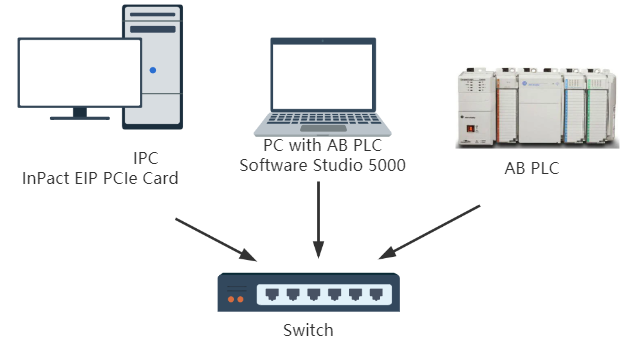
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les réglages de connexion matérielle.
-
AB PLC : Un automate modulaire 1769‑L19ER‑BB1B est utilisé comme exemple dans les instructions suivantes.
-
Adaptateur d’alimentation : AC 220 V vers DC 24 V
-
IPC avec carte d’interface HMS IXXAT INpact 40 PCIe installée
-
Commutateur réseau et câbles Ethernet
La connexion matérielle est la suivante. Chaque appareil a une adresse IP unique, mais tous doivent être dans le même sous-réseau et ne pas être utilisés par d’autres appareils. Pour les paramètres d’adresse IP du PLC et de la carte de communication, veuillez vous référer à la section ci‑dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur avec Studio 5000 installé, voir ce lien.
Logiciel
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le logiciel requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
AB PLC Studio 5000 |
Logiciel de programmation AB PLC |
Ordinateur utilisé pour la programmation de l’AB PLC |
Mech-Vision & Mech-Viz versions: 2.0.0 or above |
Logiciel qui fournit le système de vision Mech-Mind |
IPC |
Veuillez copier et coller les fichiers suivants sur un PC avec Studio 5000 installé:
-
Fichier Software EIP.eds, utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier Software EIP.eds se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
Fichiers d’exemple de programme PLC :
-
CameraSignalsMove.L5X : utilisé pour transférer les signaux du système de vision
-
CameraTest.L5X : utilisé pour tester le système de vision
-
MM EtherNet IP Interface Program.L5X : utilisé pour implémenter les fonctionnalités de diverses commandes d’interface
Les fichiers de programme d’exemple sont stockés dans le dossier où Mech-Vision & Mech-Viz sont installés : Communication Component/Robot_Interface/EthernetIP/Programming Samples/AB PLC EthernetIP. -
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le logiciel requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
AB PLC Studio 5000 |
Logiciel de programmation AB PLC |
Ordinateur utilisé pour la programmation de l’AB PLC |
Logiciel pilote de la carte de communication |
IPC |
|
Mech-Vision & Mech-Viz versions: 2.0.0 or above |
Logiciel qui fournit le système de vision Mech-Mind |
IPC |
Utilisé pour configurer l’adresse IP de la carte PCIe |
IPC |
Veuillez copier et coller les fichiers suivants sur un PC avec Studio 5000 installé:
-
Fichier 005A002B003A0100.EDS, utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
Fichiers d’exemple de programme PLC :
-
CameraSignalsMove.L5X : utilisé pour transférer les signaux du système de vision
-
CameraTest.L5X : utilisé pour tester le système de vision
-
MM EtherNet IP Interface Program.L5X : utilisé pour implémenter les fonctionnalités de diverses commandes d’interface
Les fichiers de programme d’exemple sont stockés dans le dossier où Mech-Vision & Mech-Viz sont installés : Communication Component/Robot_Interface/EthernetIP/Programming Samples/AB PLC EthernetIP. -
Configurer la communication
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Ouvrez Mech-Vision, et vous pouvez arriver sur différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous êtes arrivé sur l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes arrivé sur l’interface principale, cliquez sur dans la barre de menus.

-
Cliquez sur la liste déroulante Sélectionner le robot, puis choisissez soit Robot répertorié soit Robot personnalisé en fonction du robot utilisé dans votre projet. Ensuite, cliquez sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. La convention des angles d’Euler du robot et le système de coordonnées du robot doivent être sélectionnés.
-
-
-
Dans la fenêtre Configuration de la communication du robot, complétez les paramètres suivants.
-
Cliquez sur le menu déroulant Sélectionner le robot, puis sélectionnez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, puis choisissez le modèle de robot que vous utilisez. Ensuite, cliquez sur Suivant.
-
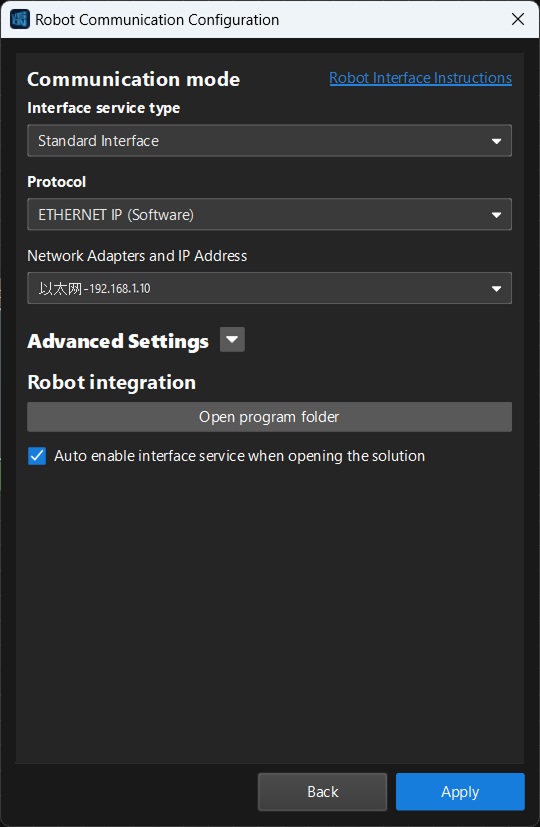
Dans la section Mode de communication, définissez Type de service d’interface sur Interface standard, définissez Protocole sur ETHERNET IP (Software), et définissez Cartes réseau et adresse IP sur la carte réseau et l’adresse IP utilisées par l’IPC.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication du robot dans la barre d’outils est activé et est devenu bleu.

Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
Vérifier la carte PCI‑e et le logiciel du pilote
-
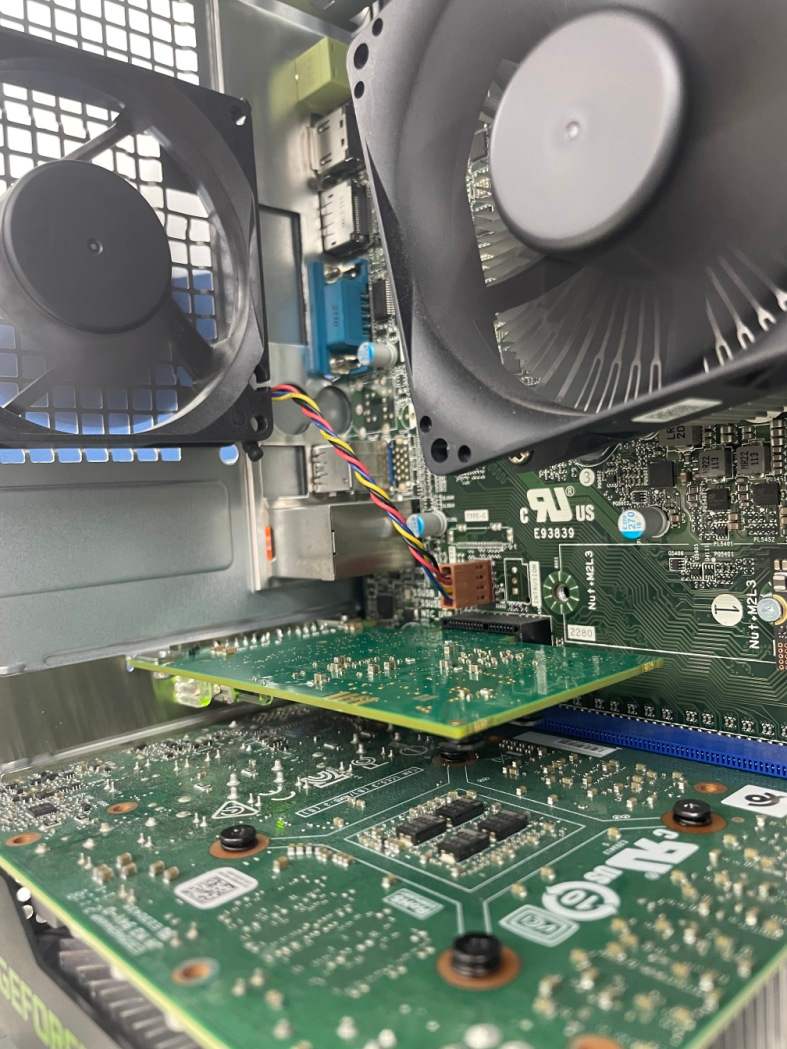
Veuillez vous assurer que la carte d’interface INpact EIP Slave PCIe a été insérée dans le slot PCI‑e de l’IPC, comme illustré ci‑dessous.
-
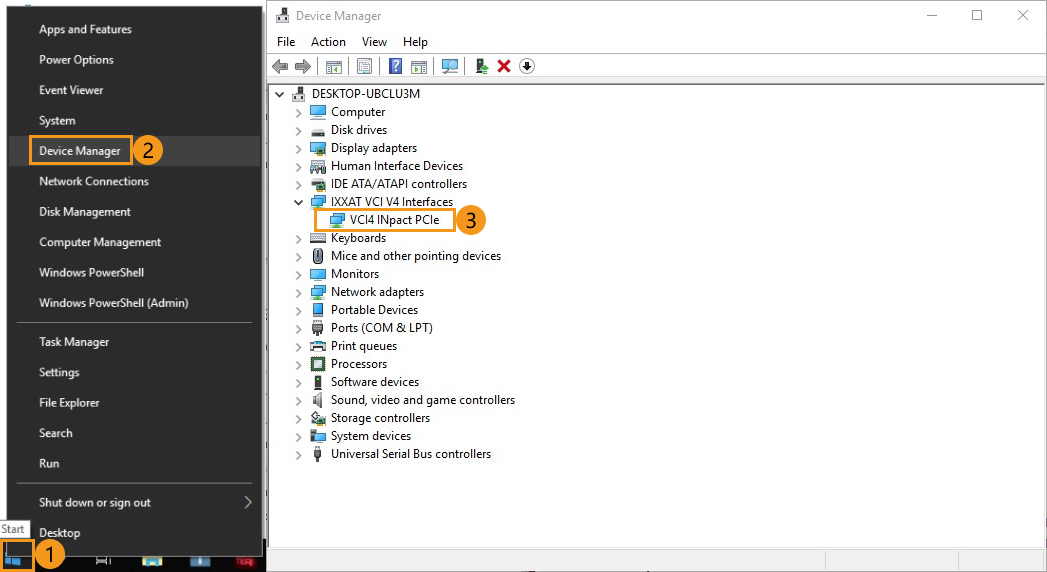
Démarrez l’IPC, allez à Démarrer ‣ Gestionnaire de périphériques et vérifiez si le logiciel du pilote VCI4 INpact PCIe a été installé.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.
-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.
-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
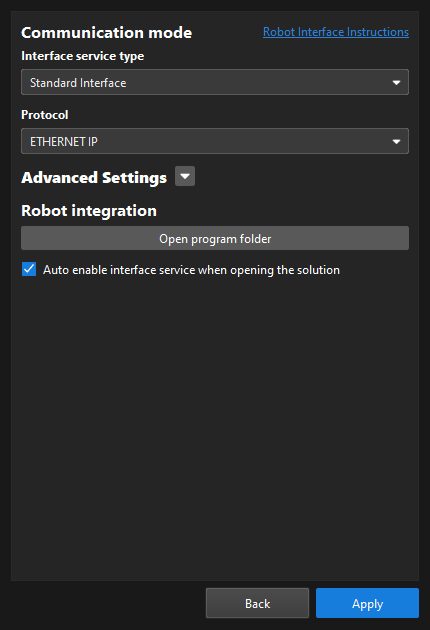
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface et sélectionnez ETHERNET IP pour Protocole.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication robot dans la barre d’outils est basculé et devient bleu.
Configurer l’adresse IP de la carte PCIe
| Assurez-vous que le service d’interface a été activé avant de procéder aux opérations suivantes. |
-
Utilisez un câble Ethernet pour connecter les ports réseau de l’IPC et du INpact EIP Slave PCIe.
Après avoir configuré l’IP et établi la communication avec succès, le câble Ethernet utilisé ici peut être retiré. -
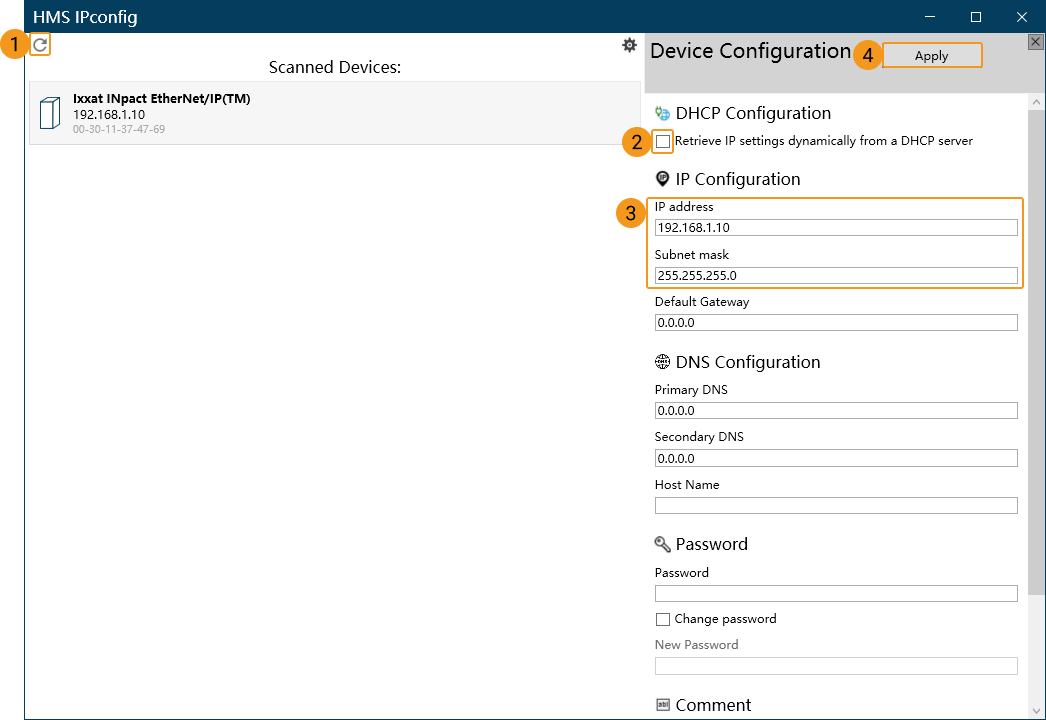
Ouvrez HMS IPconfig, cliquez sur l’icône de scan et désélectionnez « Retrieve IP settings dynamically from a DHCP server », puis entrez l’adresse IP et le masque de sous-réseau. Après la configuration, cliquez sur Appliquer et quittez le logiciel.
Créer et configurer le projet PLC
Créer un projet PLC
-
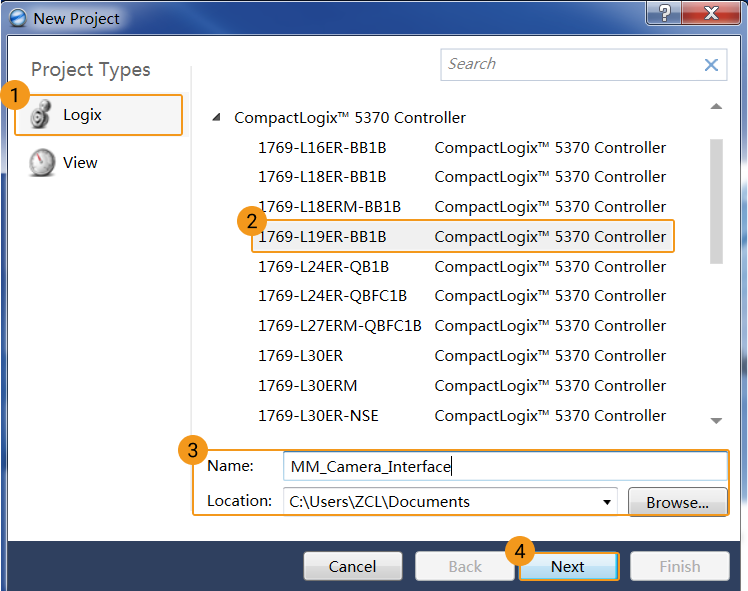
Sur l’ordinateur, ouvrez le logiciel Studio 5000, cliquez sur Nouveau projet, et une fenêtre Nouveau projet apparaîtra.

-
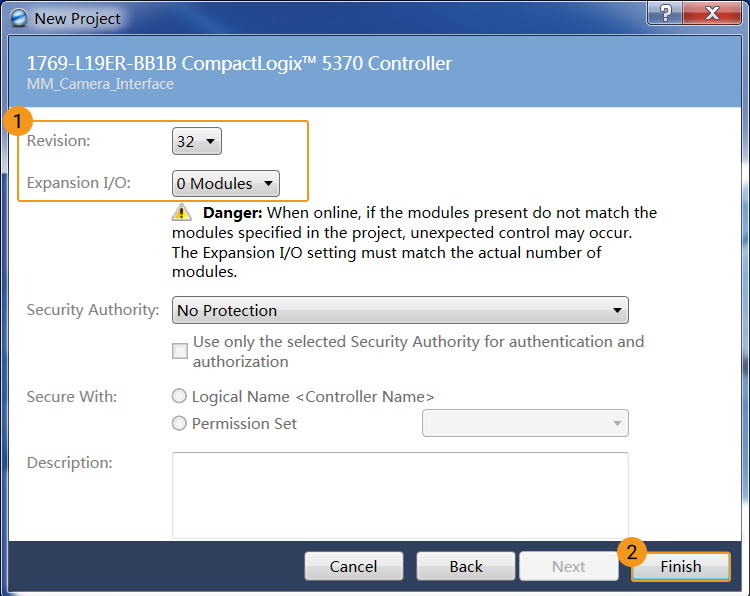
Cliquez sur Logix, et sélectionnez la série et le modèle de CPU correspondants selon l’AB PLC utilisé (un automate modulaire 1769‑L19ER‑BB1B est utilisé comme exemple dans les instructions suivantes). Entrez le Nom du projet, sélectionnez l'Emplacement, et cliquez sur Next.
-
Sélectionnez Révision et E/S d’extension selon la situation réelle, et cliquez sur Finish pour entrer dans l’interface du projet.
Définir l’adresse IP du PLC
-
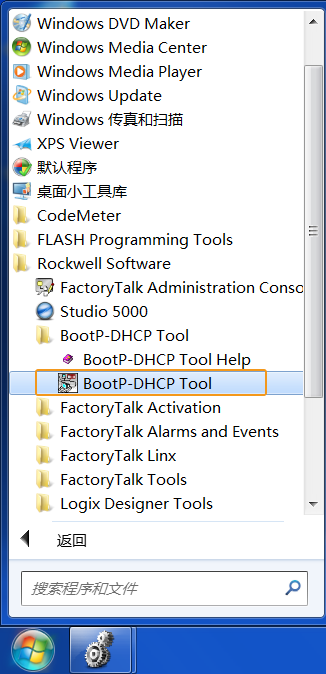
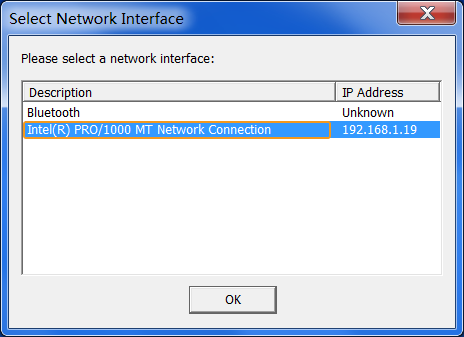
Sur l’ordinateur, allez à , et une fenêtre Select Network Interface apparaîtra.
-
Sélectionnez le pilote de l’adaptateur Ethernet connecté au PLC et cliquez sur OK.
-
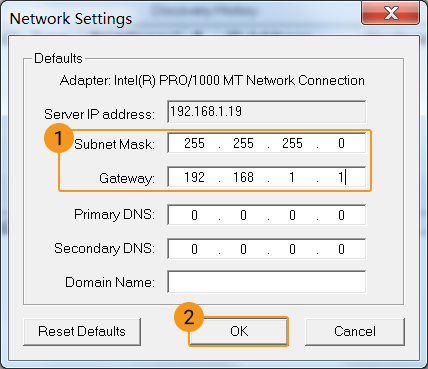
Dans la fenêtre BootP DHCP EtherNet/IP Commissioning Tool, allez à .
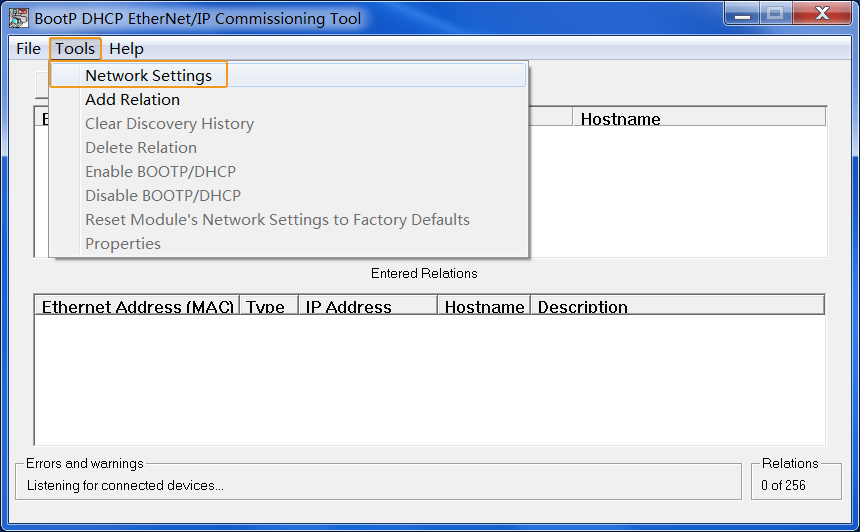
Définissez le masque de sous-réseau et la passerelle et cliquez sur OK.
-
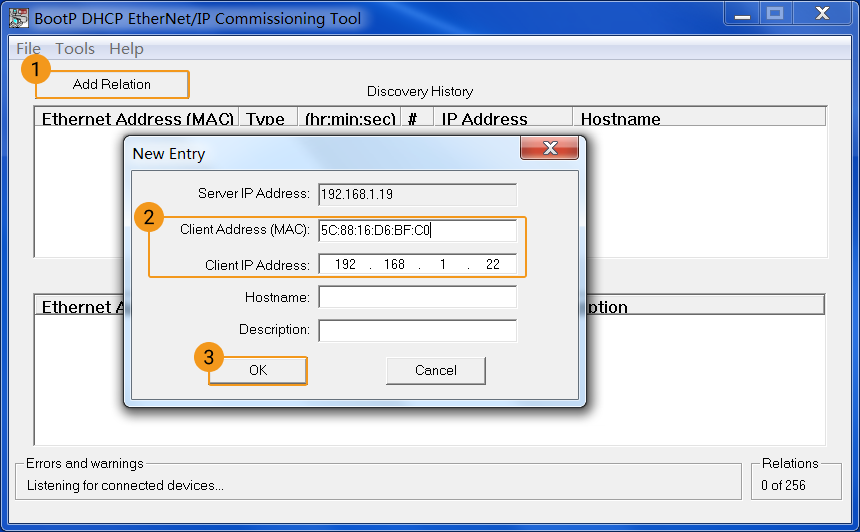
Cliquez sur Add Relation, entrez l’adresse MAC et l’adresse IP du PLC dans la fenêtre contextuelle (la figure ci‑dessous montre l’adresse utilisée dans l’exemple), et cliquez sur OK.
-
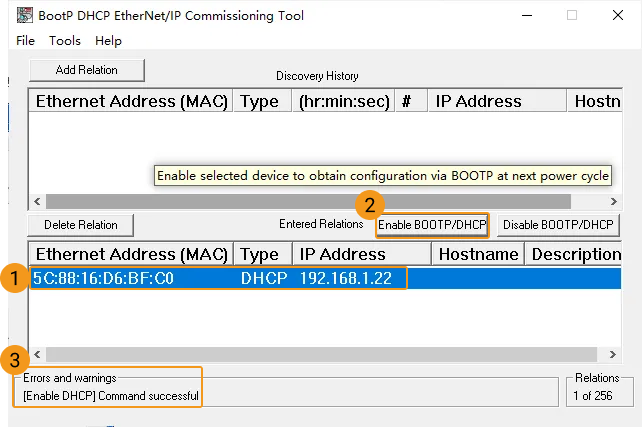
Sélectionnez la Relation créée, cliquez sur Enable BOOTP/DHCP pour activer la fonction BOOTP. En cas de succès, le message [Enable BOOTP/DHCP] Command successful s’affichera dans la barre d’état ci‑dessous.
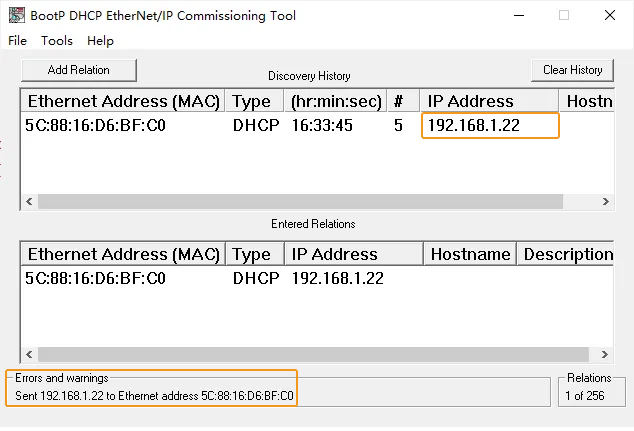
Mettez le PLC hors tension et redémarrez‑le, redémarrez BootP DHCP EtherNet/IP Commissioning Tool (sans enregistrer les fichiers de configuration), puis attendez que l’adresse MAC du PLC apparaisse dans la section Discovery History. Double‑cliquez sur l’adresse MAC, modifiez l’adresse IP du PLC dans la fenêtre contextuelle, puis cliquez sur OK. L’adresse utilisée dans la figure suivante est fournie uniquement à titre de référence.
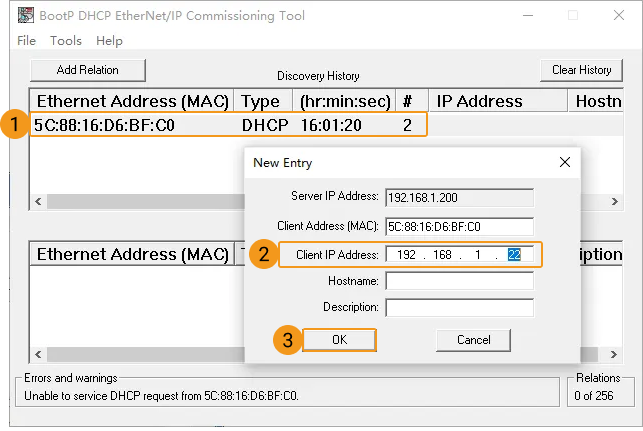
Si les configurations précédentes sont terminées, le message Sent 192.168.1.22 to Ethernet address 5C:88:16:D6:BF:C0 s’affichera dans la barre d’état et l’adresse du PLC configurée s’affichera dans la section Discovery History.
En cas d’échec, veuillez vérifier votre connexion réseau et vos paramètres IP.
-
Sélectionnez l’adresse MAC dans la section Entered Relations et cliquez sur Disable BOOTP/DHCP pour désactiver la fonction BOOTP. En cas de succès, le message « [Disable BOOTP/DHCP] Command successful » s’affichera d’abord dans la barre d’état ci‑dessous, puis « Unable to service DHCP request from 5C:88:16:D6:BF:C0 » s’affichera. Vous pouvez ensuite fermer la fenêtre BootP DHCP EtherNet/IP Commissioning Tool.
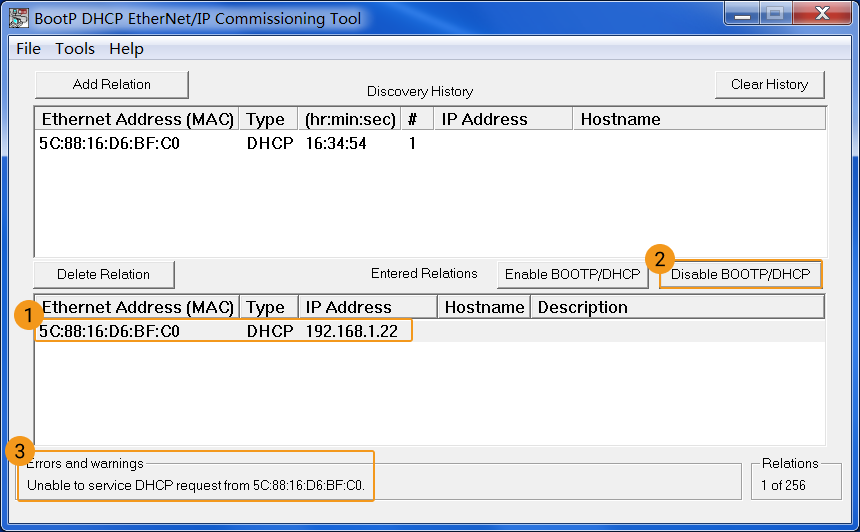
En cas d’échec, veuillez vérifier votre connexion réseau et vos paramètres IP.
Connecter le contrôleur
-
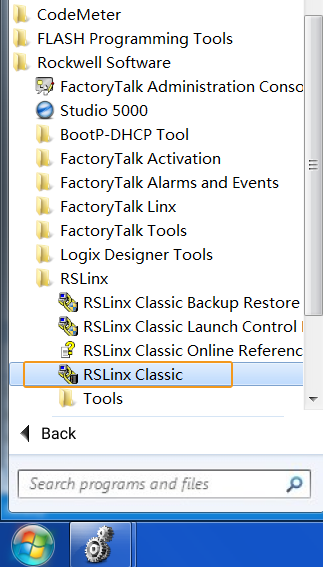
Sur l’ordinateur, allez à , et une fenêtre RSLinx Classic Gateway apparaîtra.
-
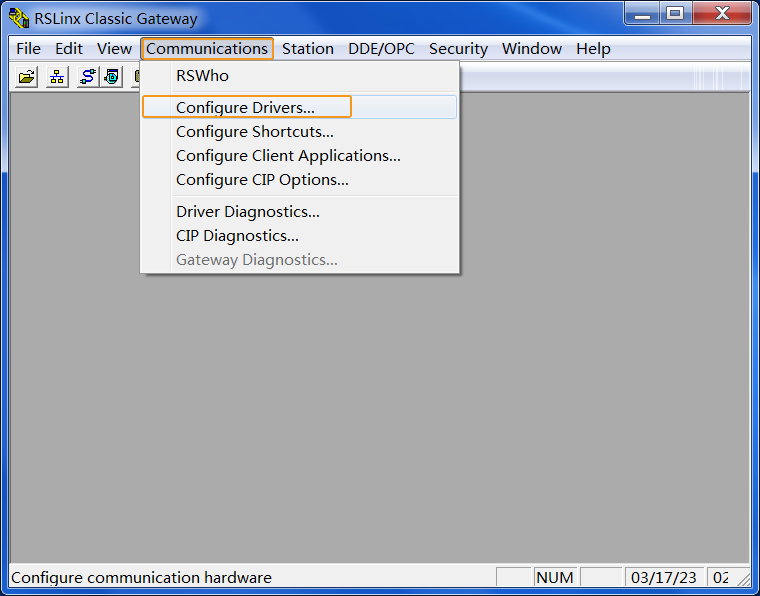
Dans la barre de menu, allez à .
-
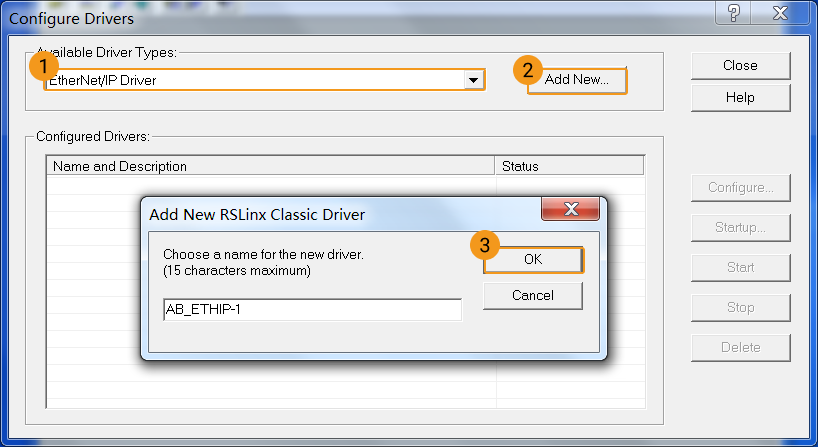
Dans la fenêtre Configure Drivers, veuillez suivre les étapes ci‑dessous.
-
Sélectionnez EtherNet/IP Driver dans le menu déroulant Available Driver Types et cliquez sur Add New.
-
Dans la fenêtre contextuelle Add New RSLinx Classic Driver, vous pouvez utiliser le nom par défaut puis cliquer sur OK.
-
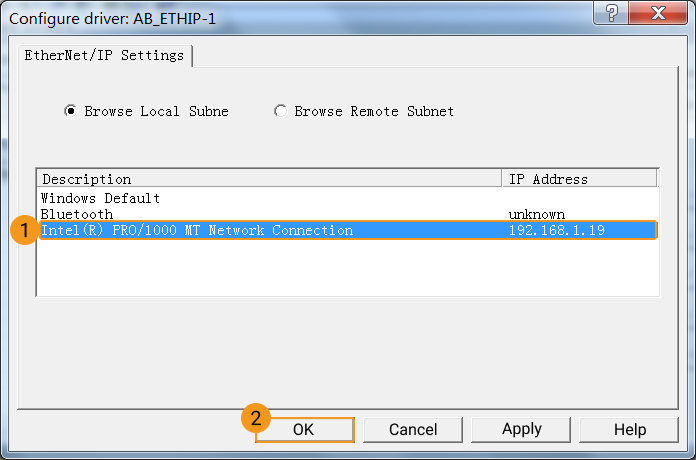
Dans la fenêtre contextuelle Configure driver: AB_ETHIP-1, sélectionnez le sous-réseau local du PLC, et cliquez sur OK.
-
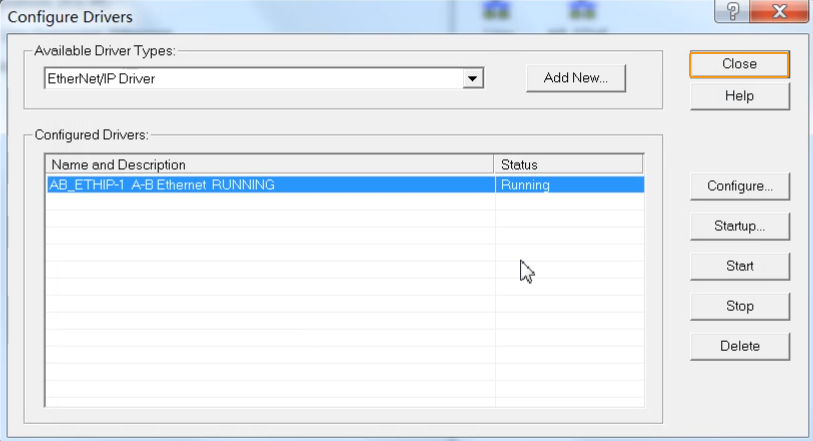
Revenez à la fenêtre Configure Drivers, cliquez sur Close.
-
-
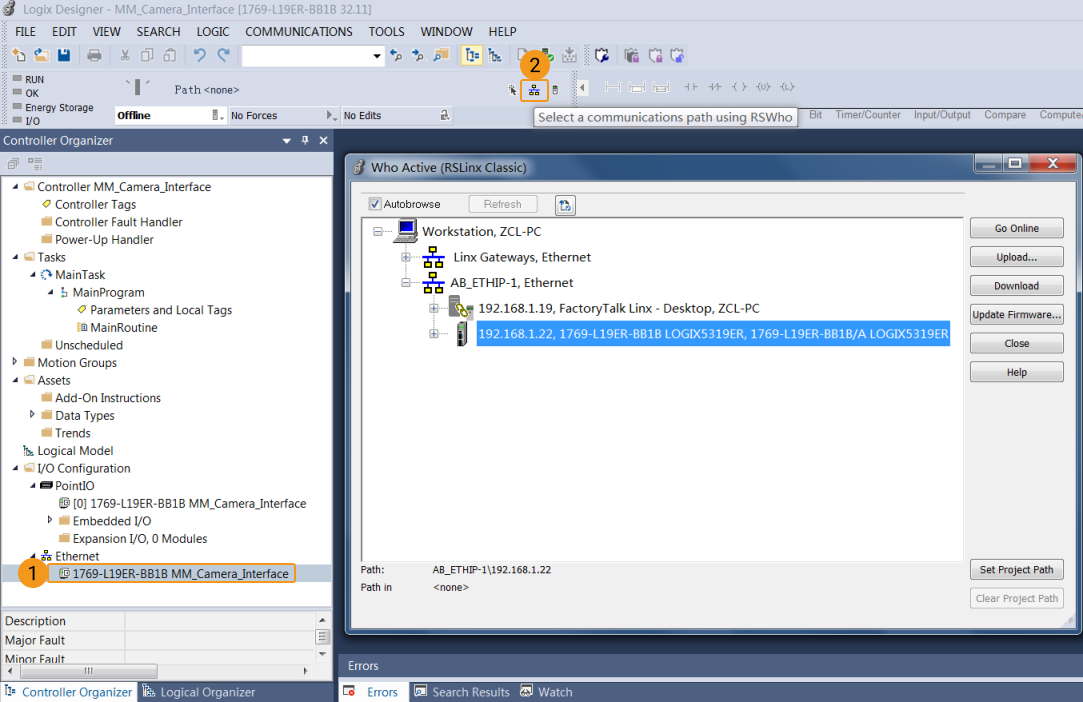
Dans le panneau Controller Organizer de Studio 5000, allez à , cliquez sur le module CPU spécifique, et cliquez sur l’icône RSWho dans la barre d’outils.
-
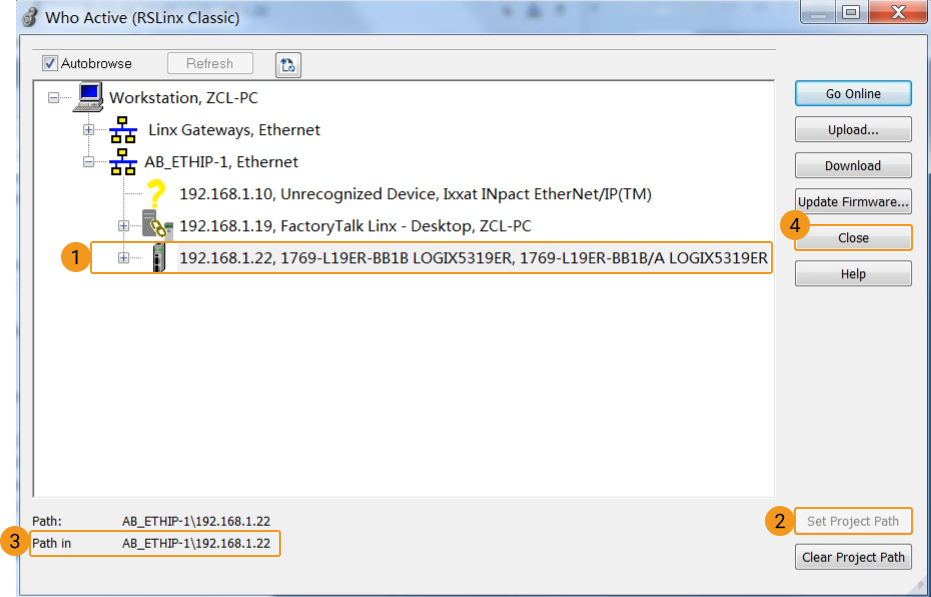
Dans la fenêtre Who Active (RSLinx Classic), développez AB_ETHIP-1 en cliquant sur le signe plus (+) à côté, sélectionnez le module CPU spécifique à connecter, et cliquez sur Set Project Path dans le coin inférieur droit pour définir le chemin. La configuration est réussie si le chemin change de <none> à AB_ETHIP-1\192.168.1.22. Cliquez sur Close pour fermer la fenêtre.
Installer le fichier EDS et configurer la communication
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
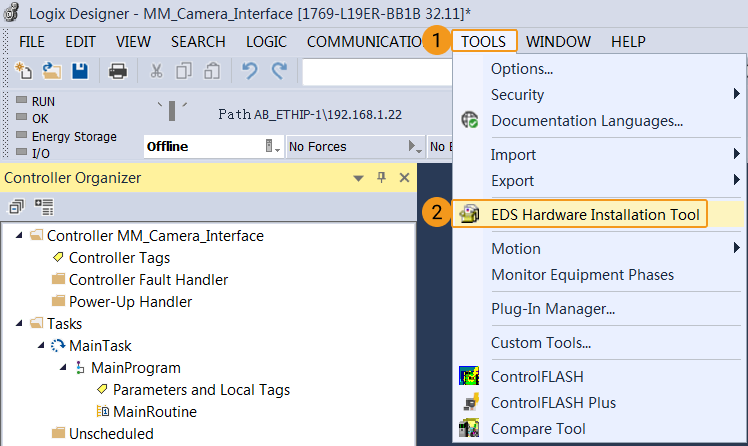
Dans l’interface de Studio 5000, allez à .
-
Dans la fenêtre EDS Wizard de Rockwell Automation, veuillez suivre les étapes ci‑dessous.
-
Cliquez sur Next.
-
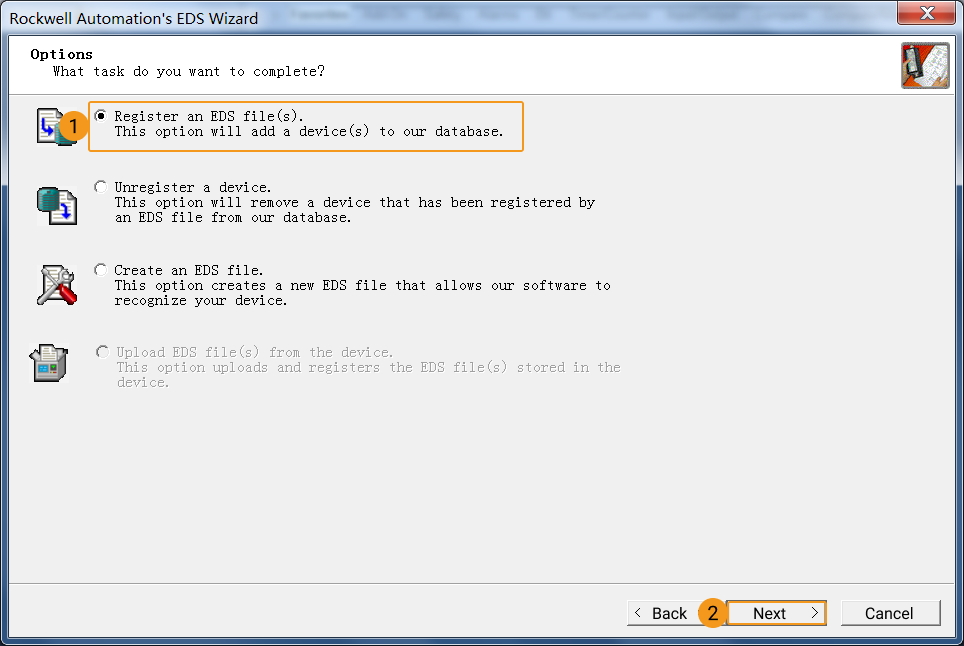
Sélectionnez Register an EDS file(s) puis cliquez sur Next.
-
Sélectionnez Register a single file puis cliquez sur Browse. Sélectionnez le fichier Software EIP.eds (qui doit avoir été copié depuis l’IPC au préalable) puis sélectionnez Next.
Le fichier Software EIP.eds se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.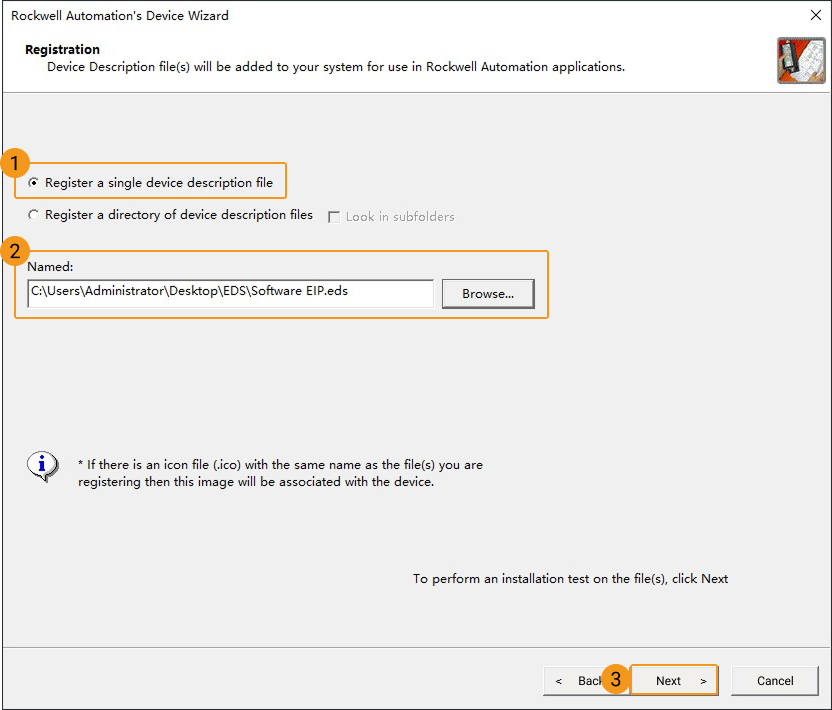
-
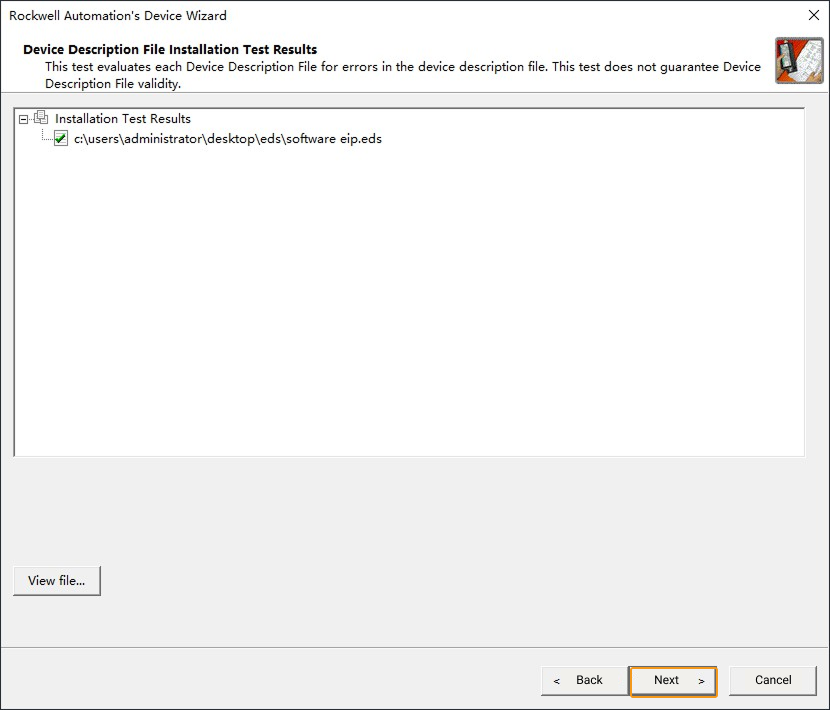
Cliquez sur Next.
-
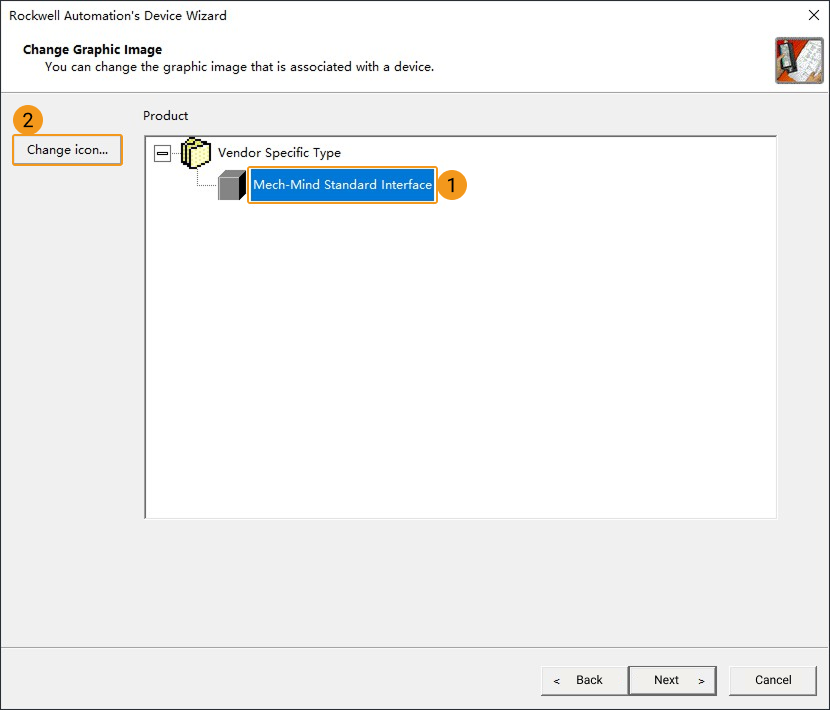
Sélectionnez Mech-Mind Interface standard et cliquez sur Change icon.
-
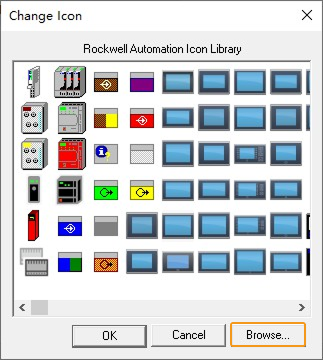
Sélectionnez Browse dans la fenêtre contextuelle.
-
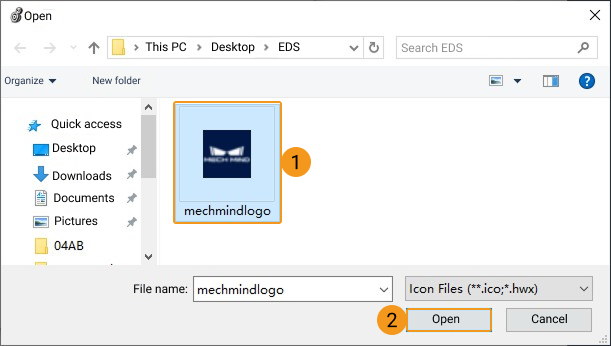
Dans la fenêtre contextuelle, sélectionnez le fichier d’icône et cliquez sur Open.
Le fichier d’icône se trouve dans le même dossier que le fichier EDS mentionné ci‑dessus.
-
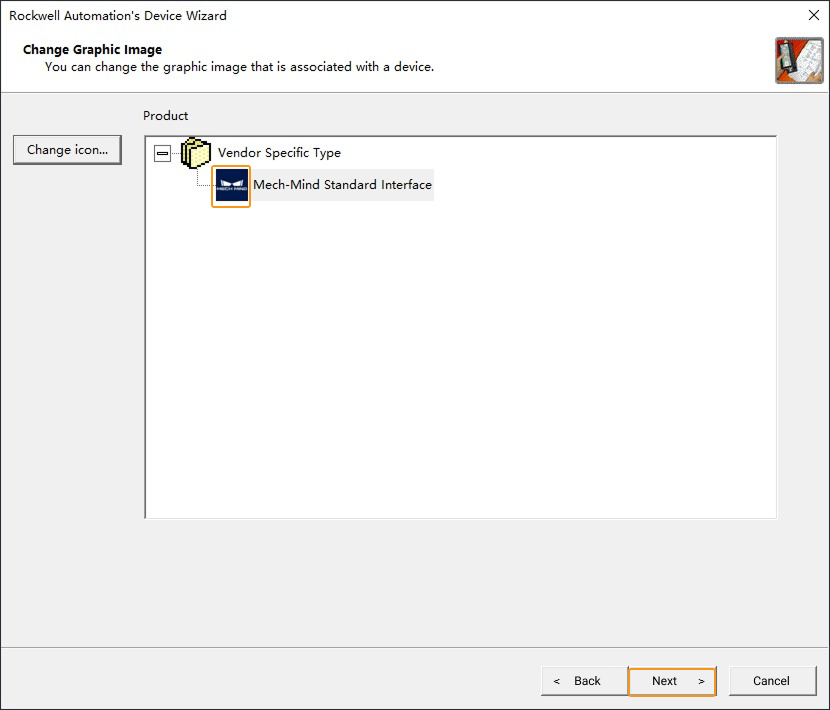
Dans la fenêtre suivante, l’icône mise à jour s’affichera devant Mech-Mind Interface standard. Cliquez sur Next.
-
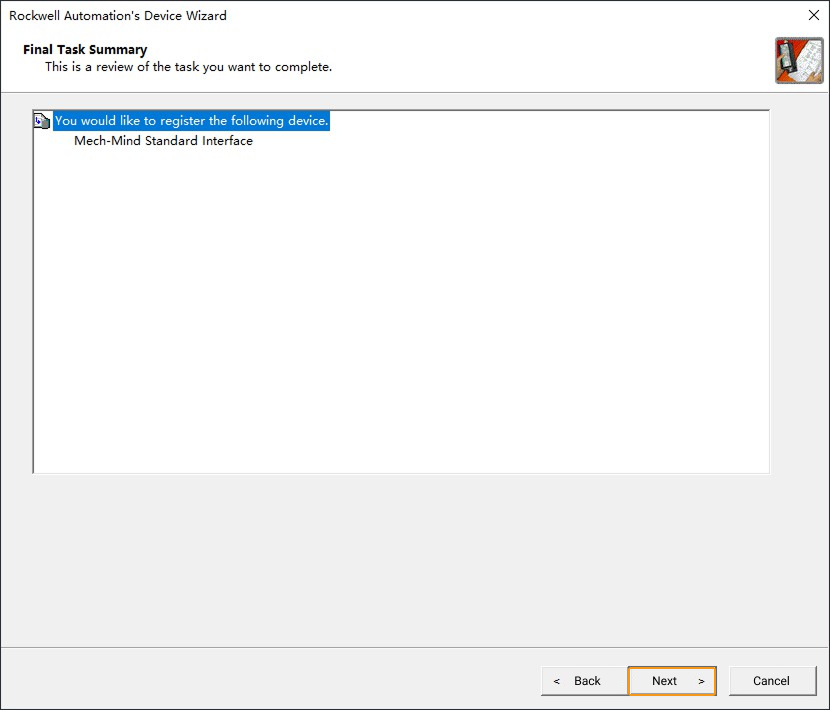
Cliquez sur Next.
-
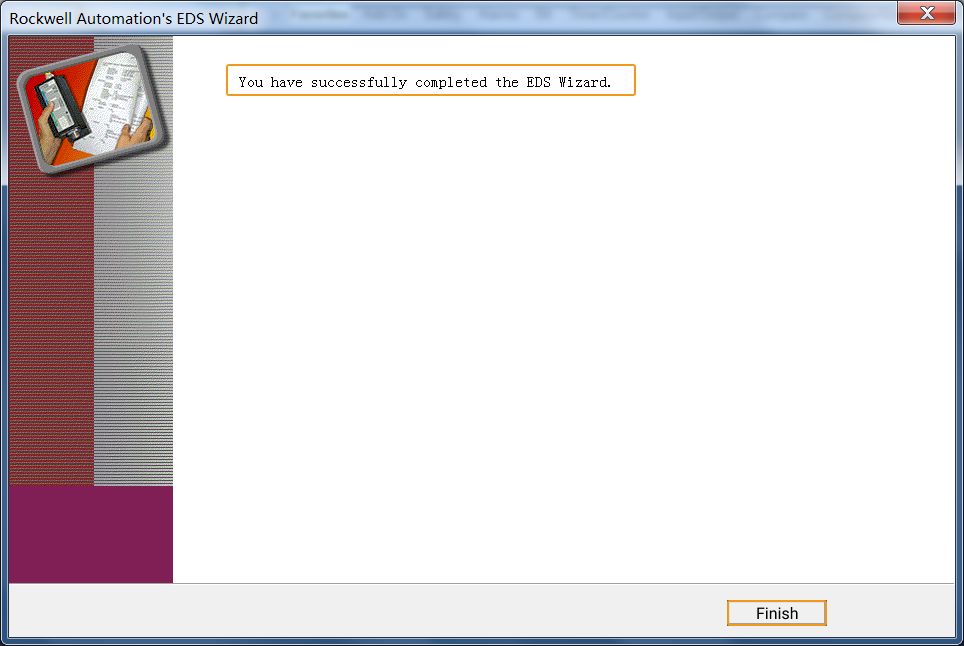
Cliquez sur Finish si le message de la figure ci‑dessous apparaît.
-
-
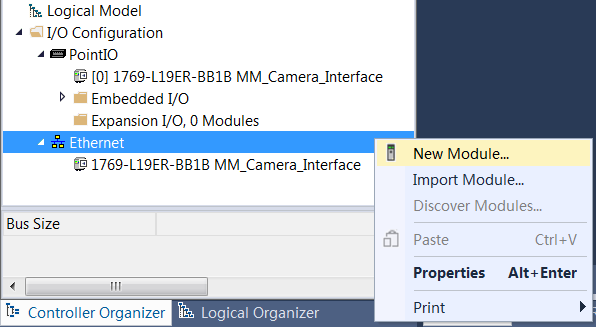
Dans le panneau Controller Organizer de Studio 5000, allez à , cliquez avec le bouton droit sur Ethernet, et cliquez sur Nouveau module.
-
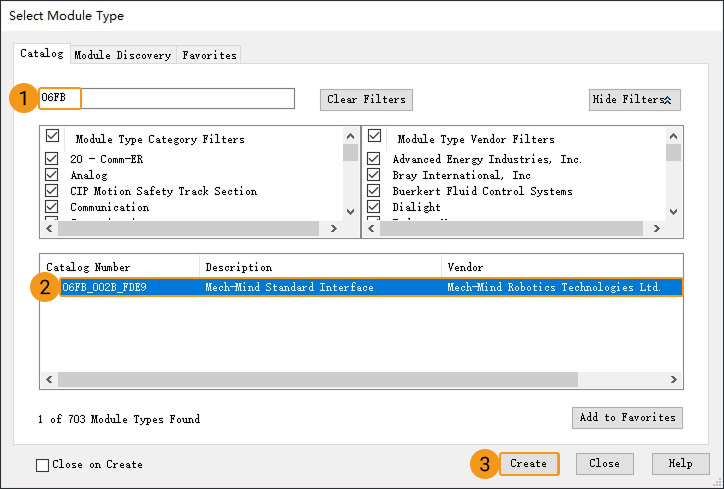
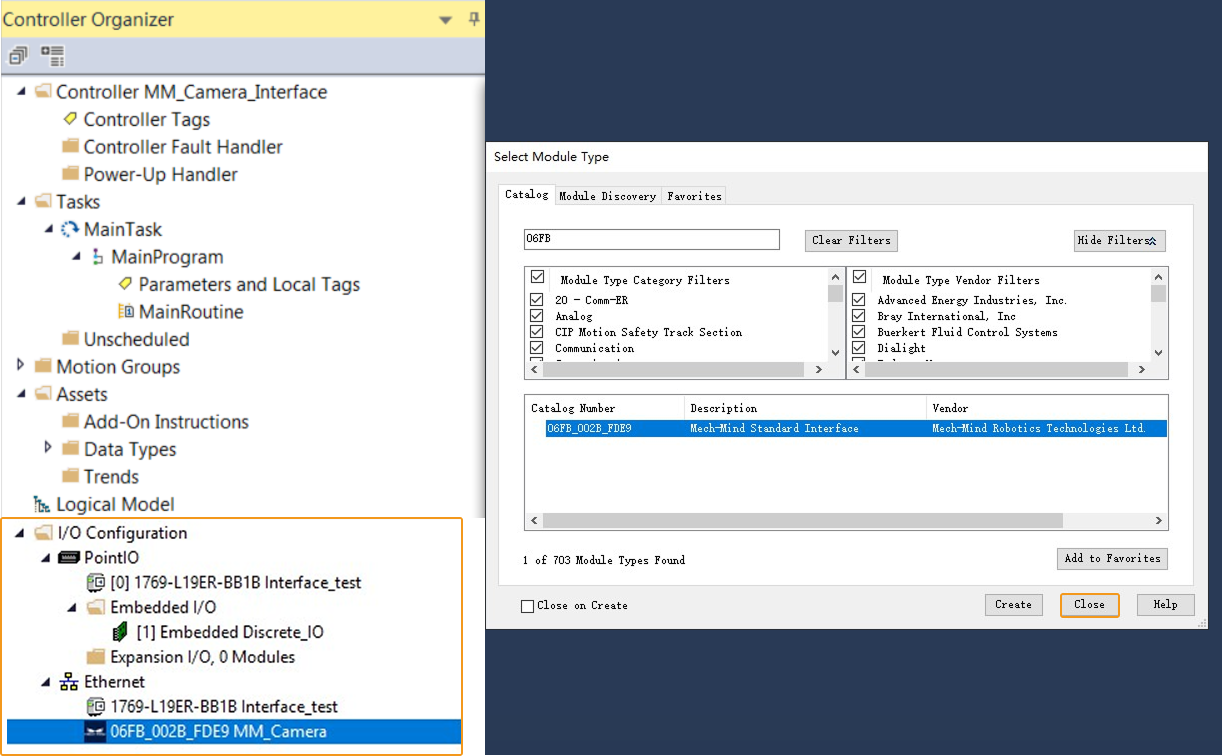
Dans la fenêtre Select Module Type, veuillez entrer 06FB dans la boîte de filtre, sélectionner 06FB_002B_FDE9 parmi les résultats filtrés, et cliquer sur Create.
-
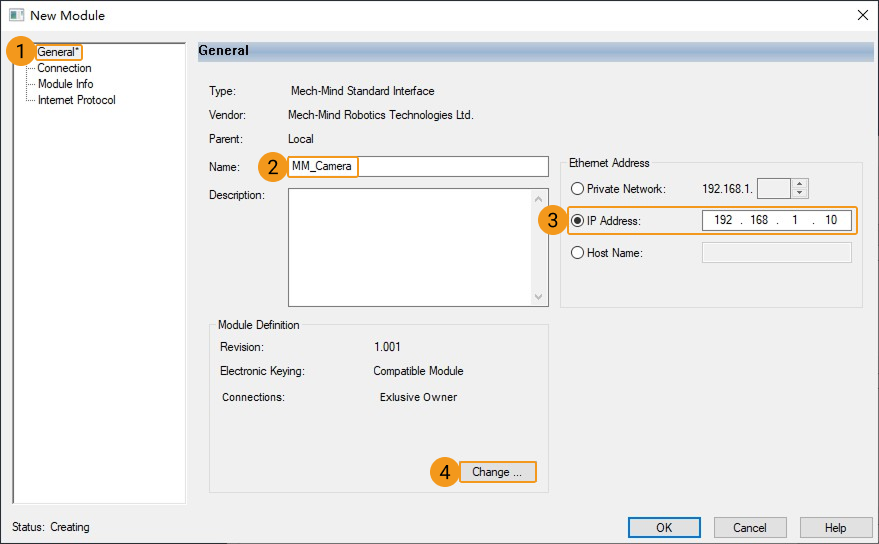
Dans la fenêtre New Module, cliquez sur l’onglet Général et entrez le nom MM_Camera (le nom ne peut pas être modifié car il doit être cohérent avec le nom d’exemple). Définissez l’adresse IP du dispositif esclave du système de vision. Cliquez sur Change.
L’adresse IP ici doit être cohérente avec l’adresse IP sélectionnée sous Adaptateurs réseau et adresse IP dans les paramètres de configuration de la communication du robot dans Mech-Vision.
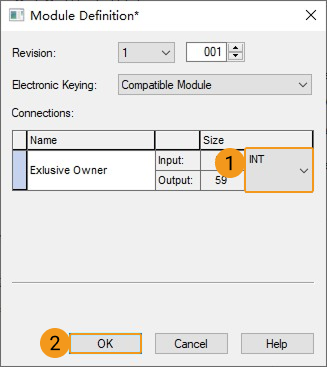
Une fenêtre apparaîtra comme ci‑dessous, modifiez le type Size en INT, et cliquez sur OK.
Cliquez sur Yes si le message ci‑dessous apparaît.
Revenez à la fenêtre New Module, cliquez sur OK.
-
Après avoir terminé les opérations ci‑dessus, naviguez vers dans la fenêtre Controller Organizer. Le module ajouté précédemment s’affichera. Dans la fenêtre Select Module Type, cliquez sur Close.
-
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Dans l’interface de Studio 5000, allez à .
-
Dans la fenêtre EDS Wizard de Rockwell Automation, veuillez suivre les étapes ci‑dessous.
-
Cliquez sur Next.
-
Sélectionnez Register an EDS file(s) puis cliquez sur Next.
-
Sélectionnez Register a single file puis cliquez sur Browse. Sélectionnez le fichier 005A002B003A0100.EDS (qui doit avoir été copié depuis l’IPC au préalable) puis sélectionnez Next.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.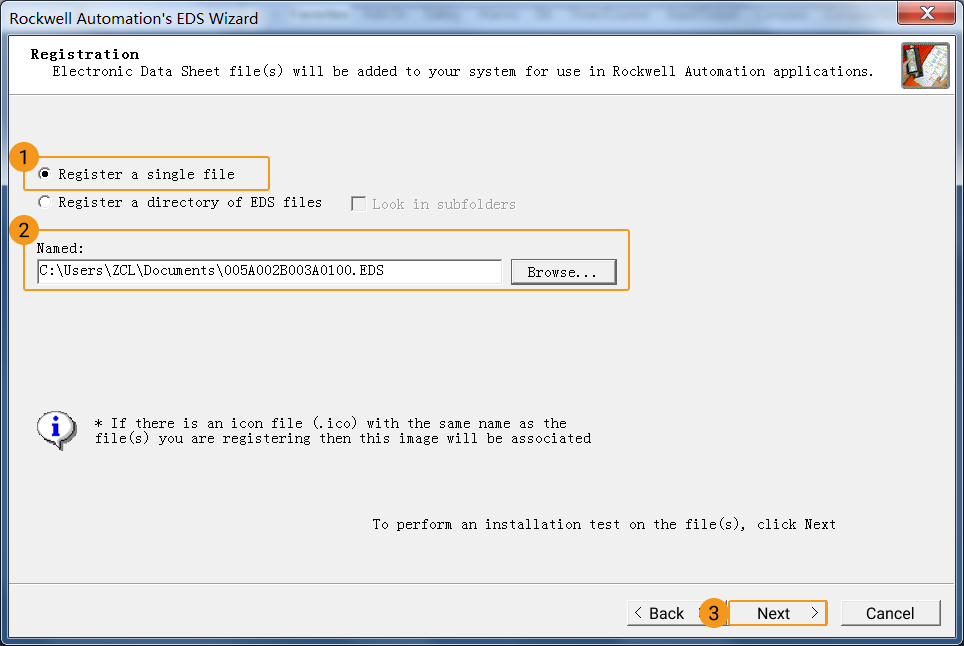
-
Cliquez sur Next.
-
Sélectionnez Next pour accepter l’icône par défaut.
-
Cliquez sur Next.
-
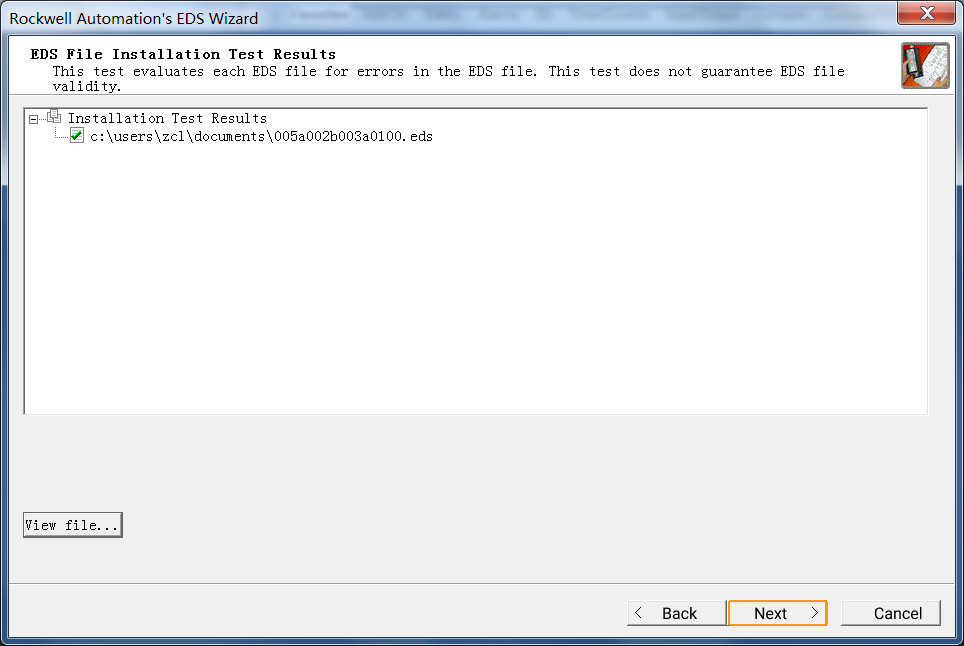
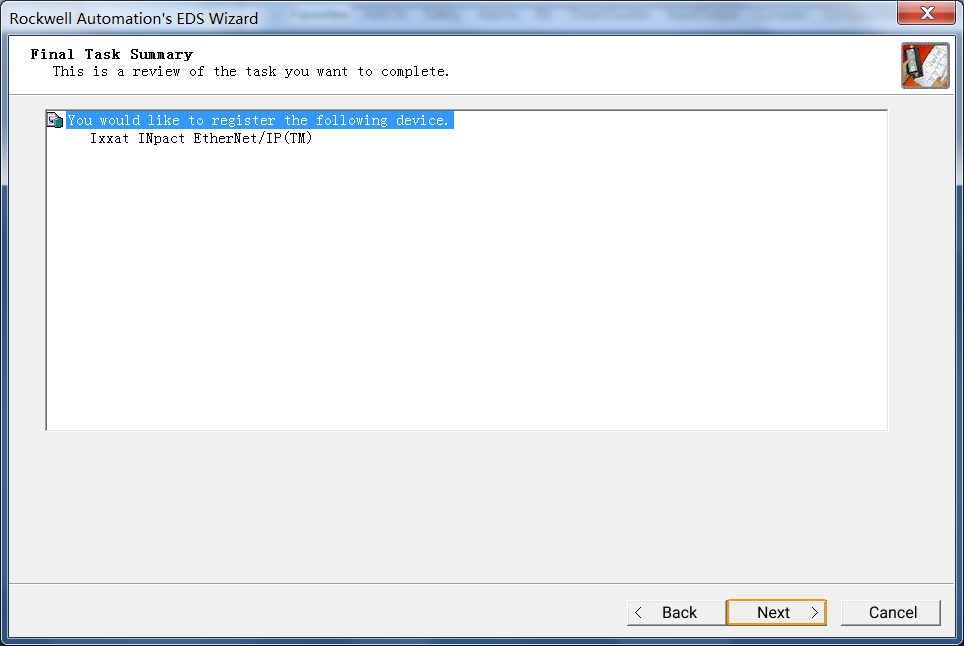
Cliquez sur Finish si le message de la figure ci‑dessous apparaît.
-
-
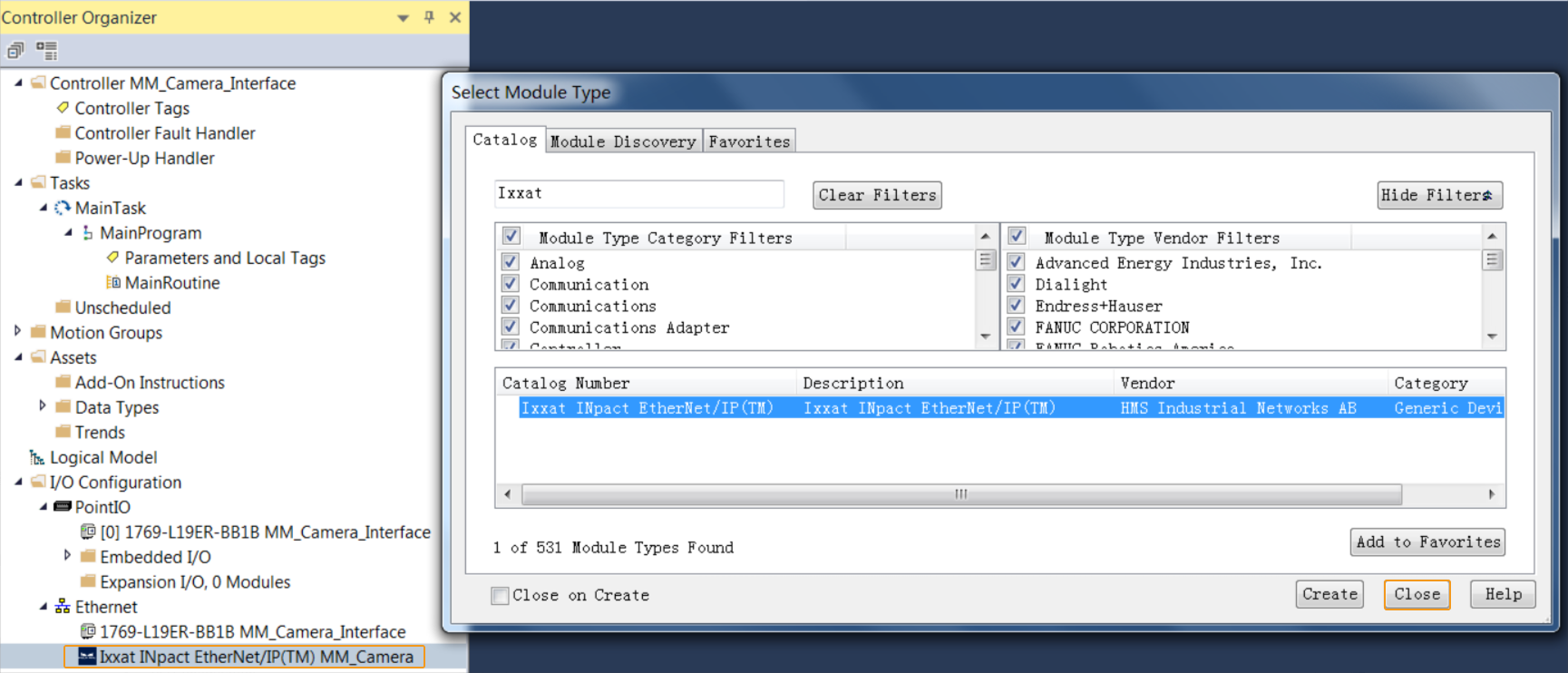
Dans le panneau Controller Organizer de Studio 5000, allez à , cliquez avec le bouton droit sur Ethernet, et cliquez sur Nouveau module.
-
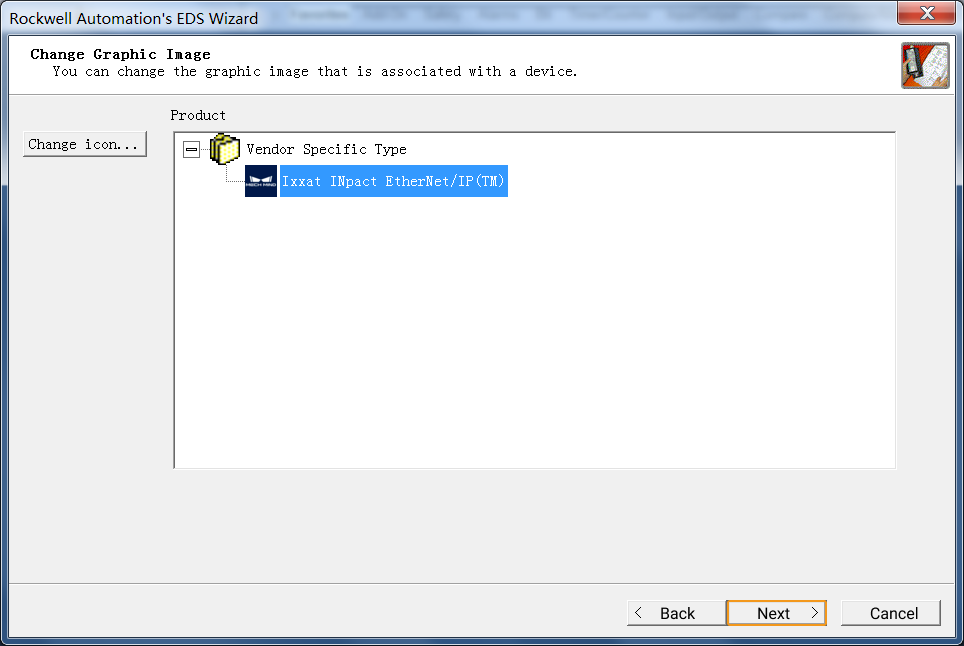
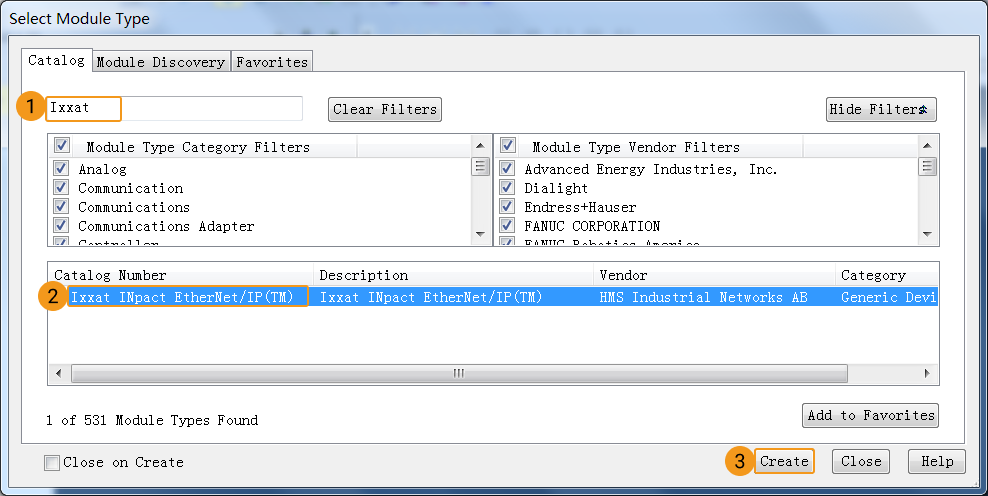
Dans la fenêtre Select Module Type, veuillez entrer Ixxat dans la boîte de filtre, sélectionner Ixxat INpact EtherNet/IP(TM), puis cliquer sur Create.
-
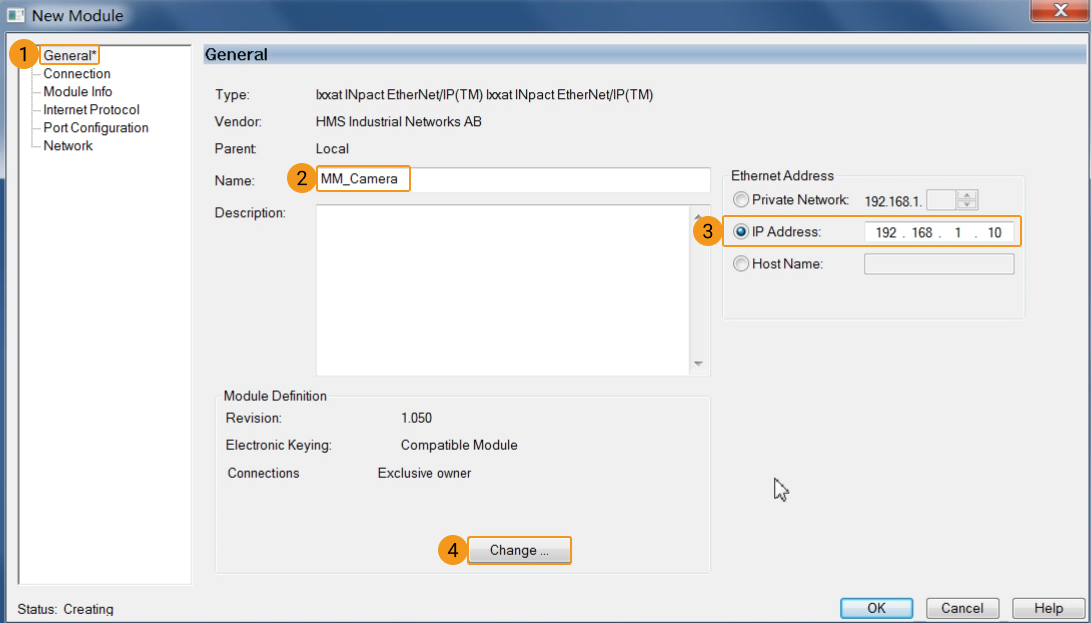
Dans la fenêtre New Module, cliquez sur l’onglet Général et entrez le nom MM_Camera (le nom ne peut pas être modifié car il doit être cohérent avec le nom d’exemple). Définissez l’adresse IP du dispositif esclave du système de vision. Cliquez sur Change.
L’adresse IP ici doit être cohérente avec l’adresse IP définie dans HMS IPconfig.
Une fenêtre apparaîtra comme ci‑dessous, modifiez le type Size en INT, et cliquez sur OK.
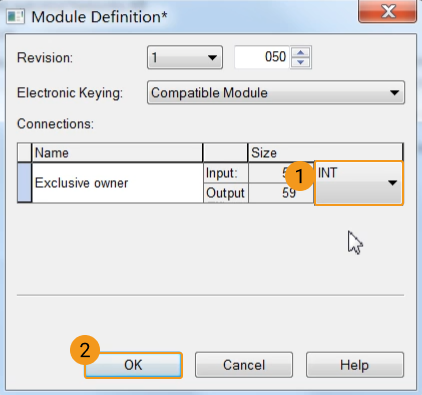
Cliquez sur Yes si le message ci‑dessous apparaît.
Revenez à la fenêtre New Module, cliquez sur OK.
-
Après avoir terminé les opérations ci‑dessus, naviguez vers dans la fenêtre Controller Organizer. Le module ajouté précédemment s’affichera. Dans la fenêtre Select Module Type, cliquez sur Close.
-
Importer le programme d’exemple et le télécharger sur le PLC
Importer des programmes d’exemple
| Avant d’ajouter le programme d’exemple à un projet déjà utilisé, il est recommandé de l’importer d’abord dans un nouveau projet et de le tester. |
-
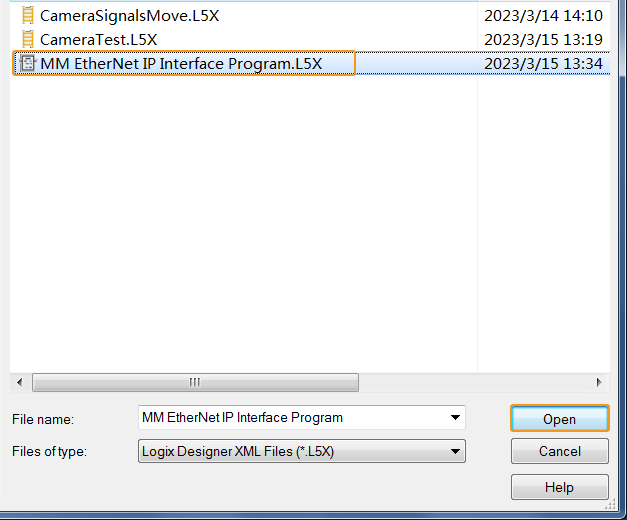
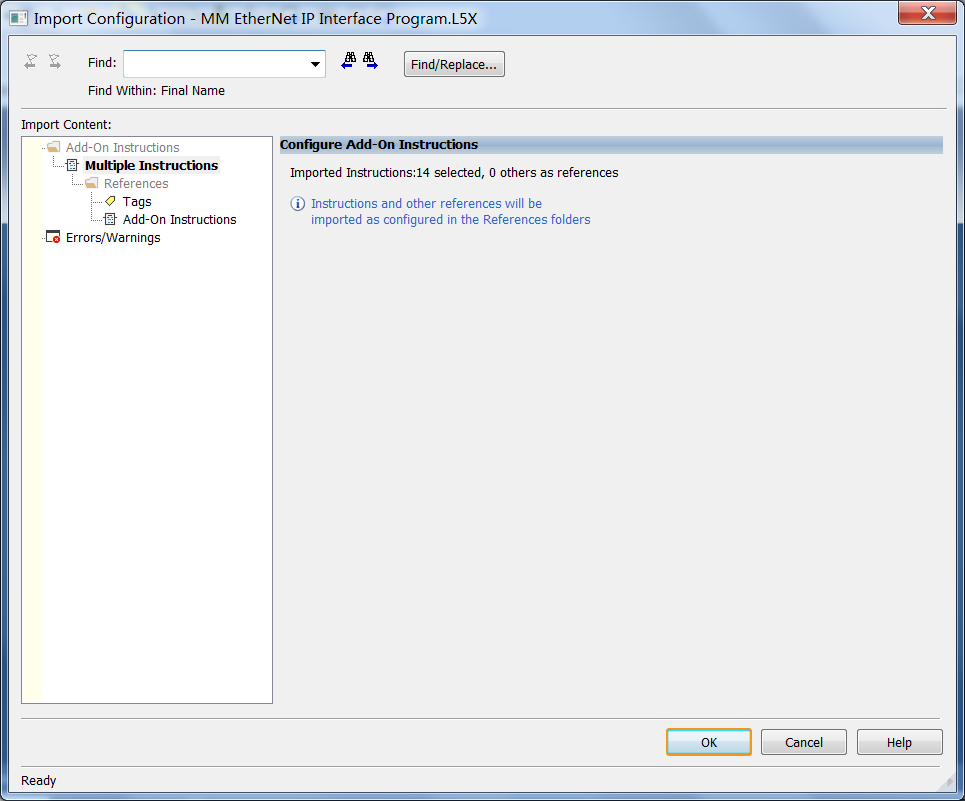
Dans la barre de menu de Studio 5000, allez à .
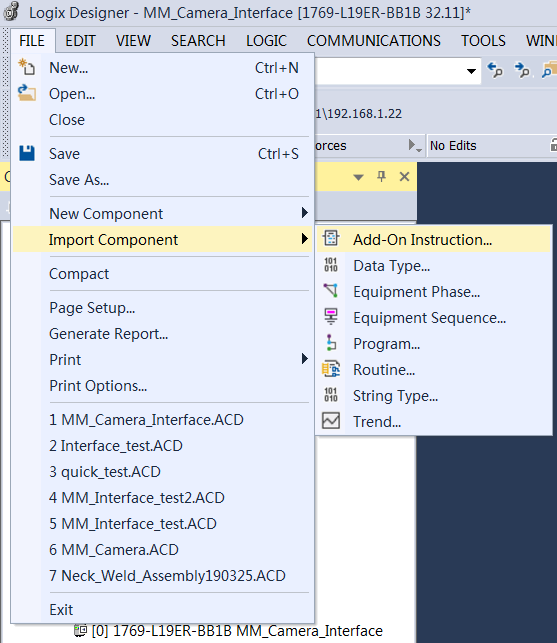
Dans la fenêtre contextuelle Import Add-On Instruction, sélectionnez le programme d’exemple MM EtherNet IP Interface Program.L5X (qui doit avoir été copié depuis l’IPC au préalable), et cliquez sur Open.
Cliquez sur OK dans la fenêtre contextuelle comme ci‑dessous.
-
Dans la barre de menu, allez à .
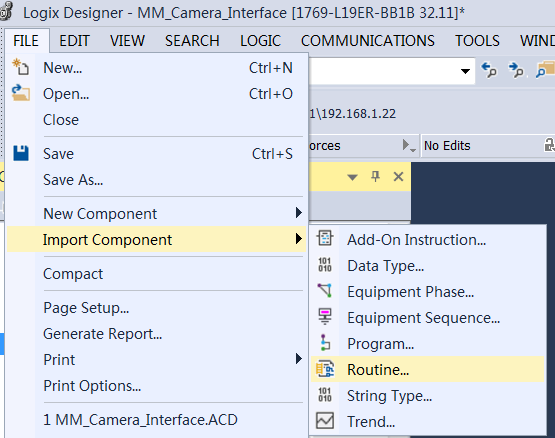
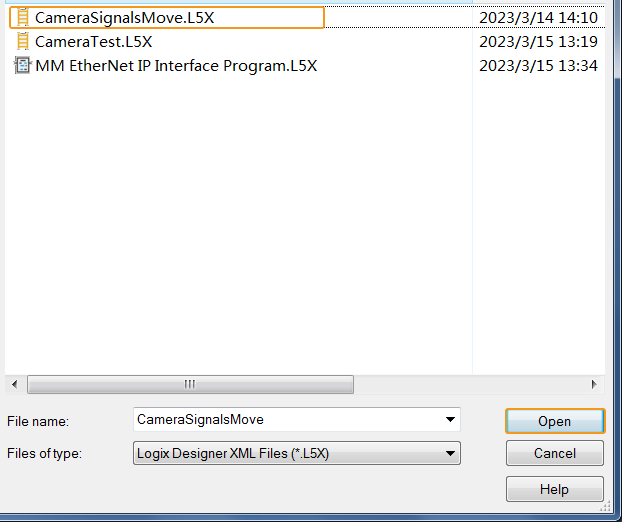
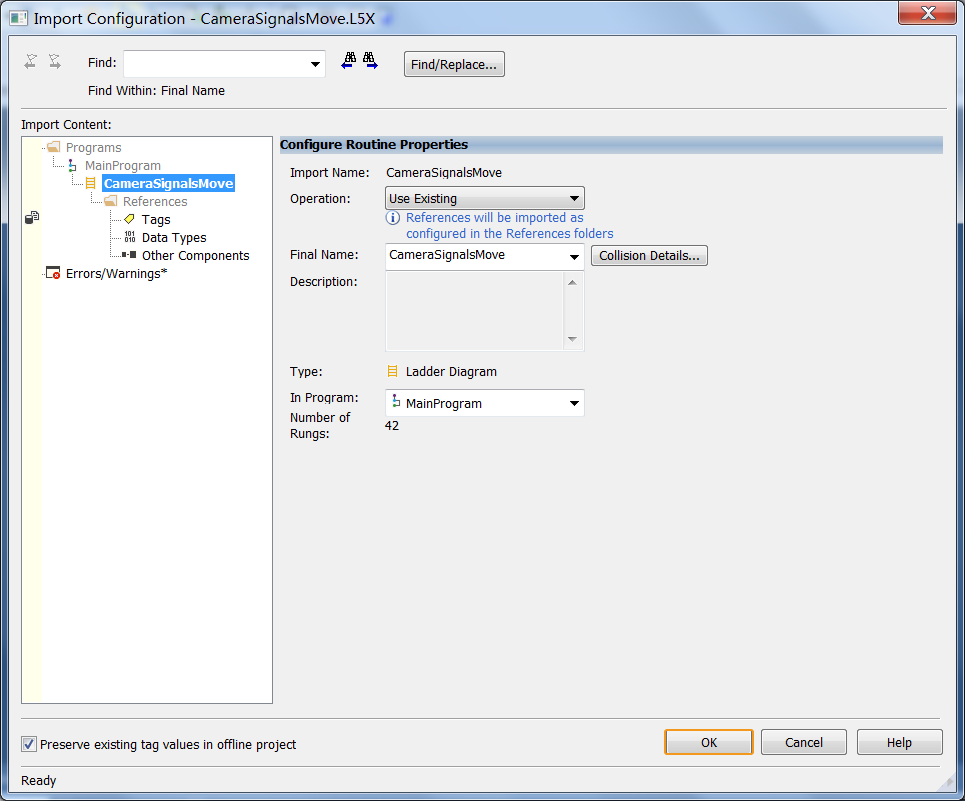
Dans la fenêtre contextuelle Import Routine, sélectionnez le fichier CameraSignalsMove.L5X (qui doit avoir été copié depuis l’IPC au préalable), et cliquez sur Open.
Cliquez sur OK dans la fenêtre contextuelle comme ci‑dessous.
-
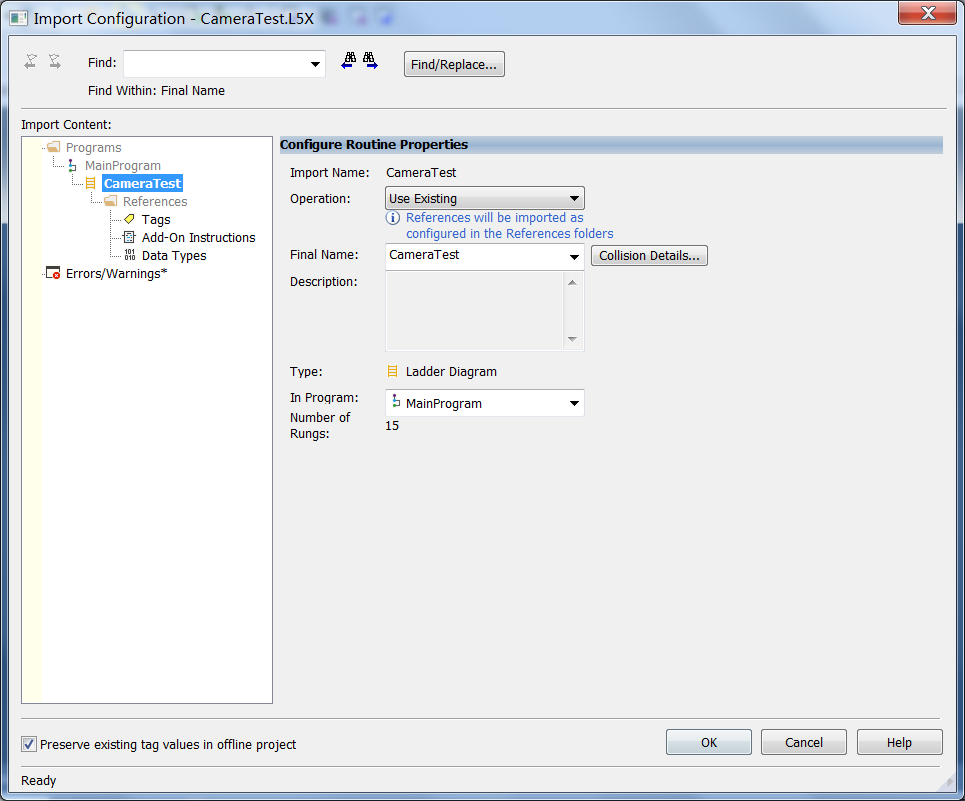
Suivez l’étape précédente et importez le fichier CameraTest.L5X (qui doit avoir été copié depuis l’IPC au préalable) dans le projet.
Télécharger le programme PLC vers le PLC
-
Dans l’interface de Studio 5000, allez à , et double‑cliquez sur MainRoutine pour ouvrir le programme principal.
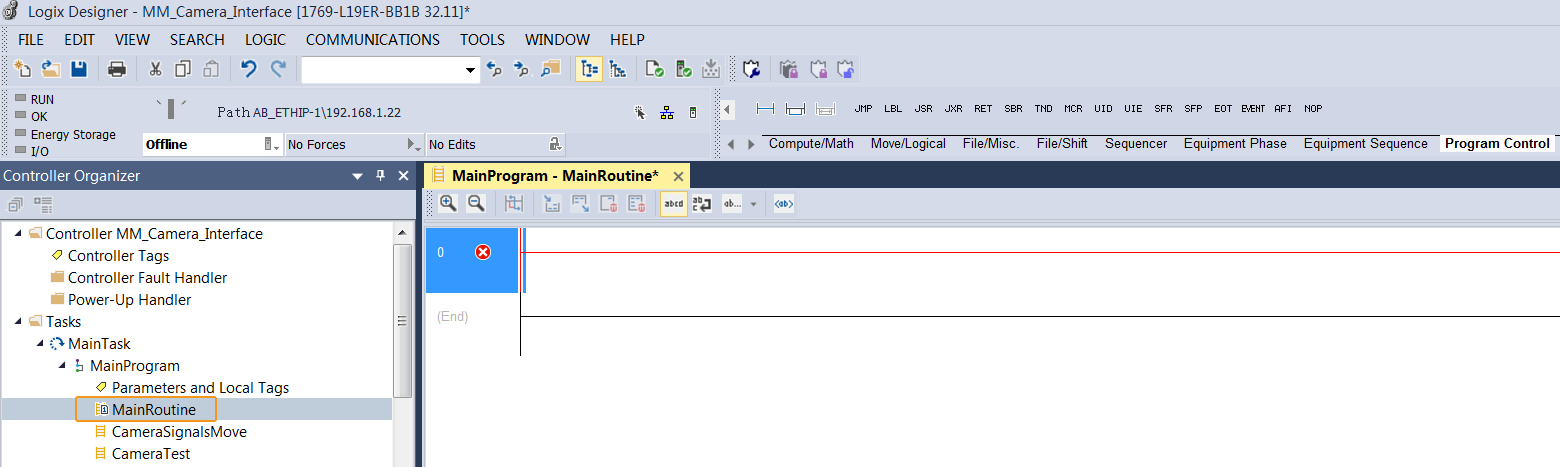
Sélectionnez l’échelon 0, allez à dans la barre d’outils, et appelez le programme CameraSignalsMove.

Sélectionnez l’échelon 0, cliquez avec le bouton droit, et sélectionnez « Copy Rung » dans le menu contextuel. Sélectionnez la fin d’échelon, cliquez avec le bouton droit, et sélectionnez « Paste » dans le menu contextuel pour ajouter une nouvelle ligne Échelon 1, et changez JSR en CameraTest.

-
Cliquez sur le menu déroulant depuis offline et sélectionnez Télécharger.
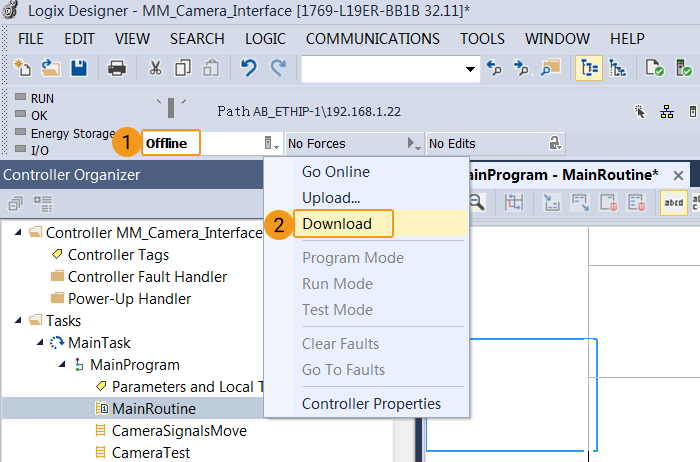
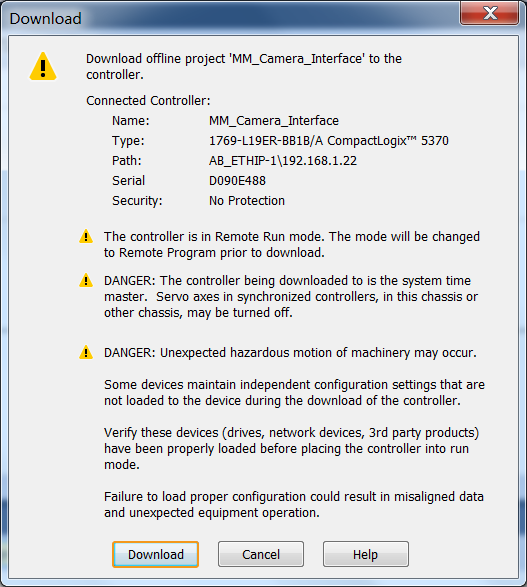
Cliquez sur Télécharger dans la fenêtre contextuelle comme ci‑dessous.
-
Après le téléchargement réussi, un message d’alerte comme ci‑dessous apparaîtra. Si la sécurité du système peut être assurée, sélectionnez Oui.
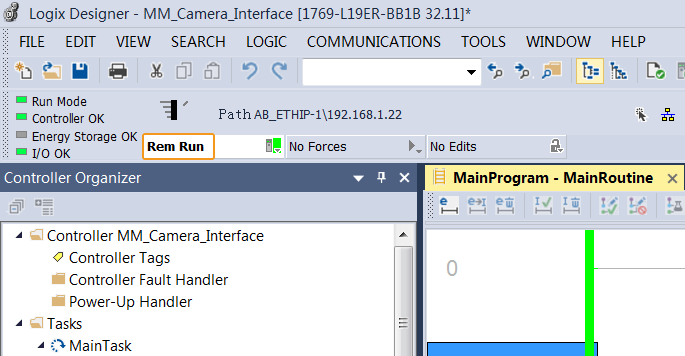
Le contrôleur est en mode Rem Run (exécution à distance).
Vérifier la communication
-
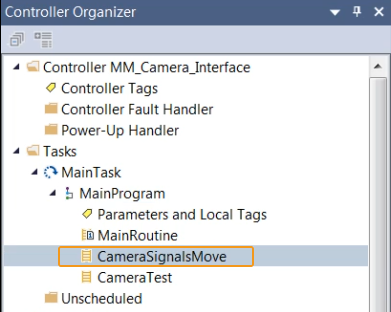
Dans l’interface de Studio 5000, allez à , et double‑cliquez sur CameraSignalsMove pour ouvrir le programme principal.
Si la connexion est établie avec succès, la valeur surveillée de FromCamera.HEARTBEAT à l’échelon 21 continuera à changer.

-
Le PLC est connecté avec succès si le message suivant s’affiche dans l’onglet Console du panneau Log de Mech-Vision : Connect to ETHERNET IP controller successfully. Si vous ne voyez pas ce message de log, veuillez vérifier :
-
Si le matériel est correctement connecté ;
-
Si le service d’interface a été démarré avec succès dans Mech-Vision ;
-
Si le programme PLC a été téléchargé avec succès vers le PLC.
-
Tester avec un projet Mech‑Vision/Mech‑Viz
Cette section présente comment utiliser le FB de programme d’exemple pour déclencher le projet Mech-Vision afin d’obtenir des points de vision et déclencher le projet Mech-Viz afin d’obtenir la trajectoire planifiée.
Prérequis
-
Revenez à Mech-Vision et créez un projet Mech-Vision. Cliquez avec le bouton droit sur la solution et sélectionnez Autoload Solution. Les projets de la solution sont également chargés automatiquement. Entre‑temps, le numéro de projet apparaîtra devant chaque nom de projet.
-
Créez un projet Mech-Viz. Cliquez avec le bouton droit sur le nom du projet dans Resources de Mech-Viz et sélectionnez Autoload Project.
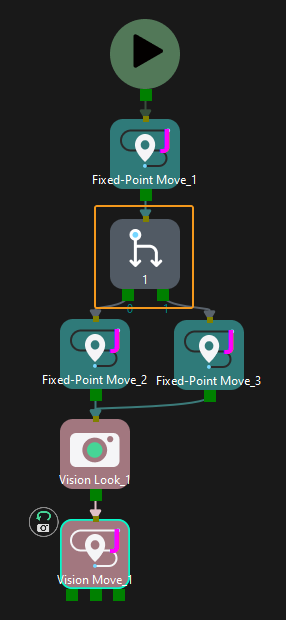
Le projet Mech-Viz utilisé pour les tests doit contenir une étape « Branch by Msg » qui a été renommée en 1 comme ci‑dessous.
Exécuter le projet Mech-Vision et obtenir des points de vision
Configurer les programmes
-
Dans l’interface Studio 5000, double‑cliquez sur le corps du programme CameraTest, et définissez l’état de ToCamera.COMM_ENABLE sur toujours activé.

-
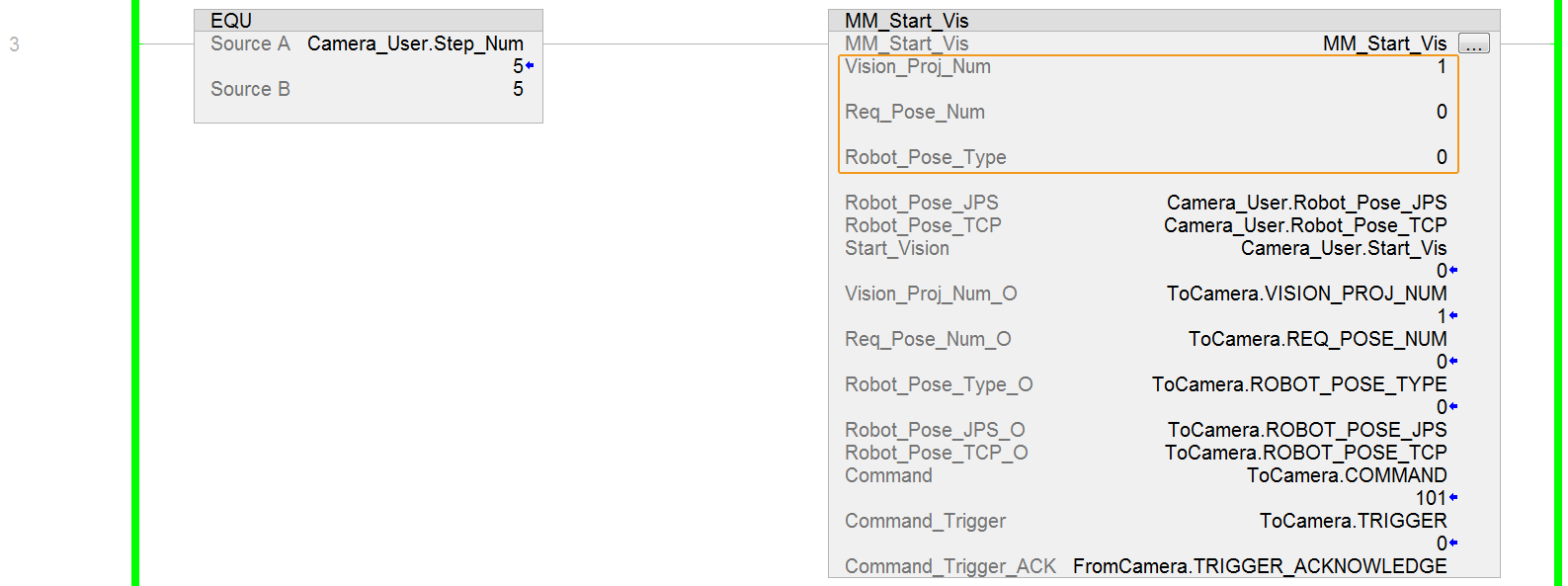
À l’échelon 3 du programme CameraTest, définissez les valeurs comme indiqué ci‑dessous.
-
Réglez la valeur de Vision_Proj_Num sur 1, alors le projet nº 1 dans Mech-Vision sera démarré.
-
Réglez la valeur de Req_Pose_Num sur 0, ce qui signifie que le projet Mech-Vision enverra tous les points de vision.
-
Définir la valeur de Robot_Pose_Type sur 0 indique que le projet est en mode eye-to-hand, et la pose de prise d’image n’est pas nécessaire.
-
Déclencher l’exécution du projet Mech-Vision
-
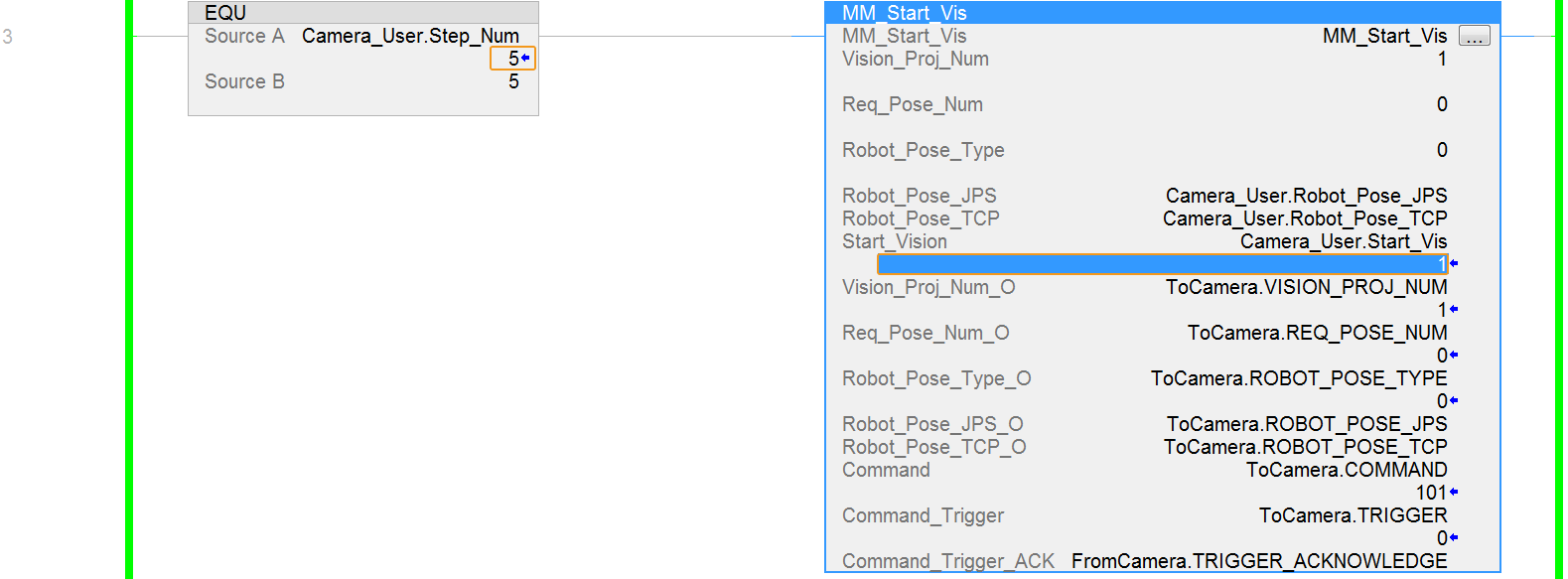
À l’échelon 3 du programme CameraTest, définissez la valeur de Camera_User.Step_Num sur 5. Cliquez sur l’étiquette Camera_User.Start_Vis de MM_Start_Vis et modifiez la valeur sur 1 pour déclencher l’exécution du projet Mech-Vision. Puis réinitialisez la valeur à 0.
-
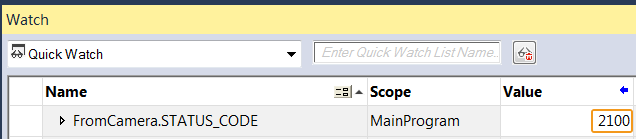
Vérifiez si la valeur retournée de STATUS_CODE est 1102.
-
Cliquez sur l’onglet Watch dans la barre d’état pour ouvrir la fenêtre Watch, et ajoutez l’étiquette FromCamera dans la colonne Nom.
-
Développez les niveaux et vérifiez la valeur retournée de STATUS_CODE.
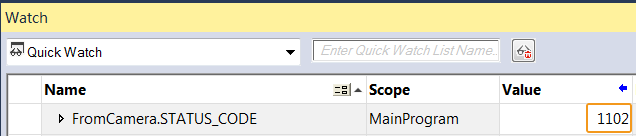
Si le projet Mech-Vision est démarré avec succès, le code d’état 1102 sera retourné. Sinon, le code d’erreur correspondant sera retourné. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
-
Obtenir des points de vision depuis Mech-Vision
-
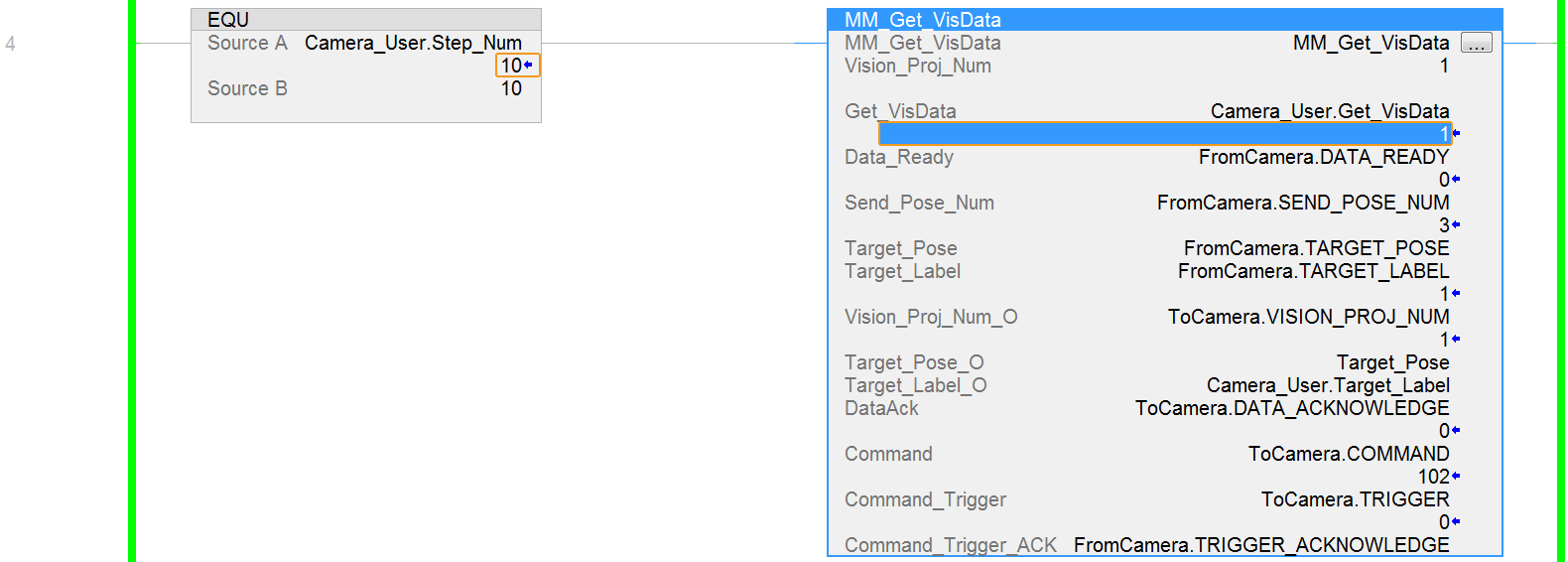
Après le retour de STATUS_CODE 1102, à l’échelon 4 du programme CameraTest, modifiez la valeur de Camera_User.Step_Num sur 10. Cliquez sur l’étiquette Camera_User.Get_VisData de MM_Get_VisData et modifiez la valeur sur 1 pour déclencher l’exécution du projet Mech‑Vision. Puis réinitialisez la valeur à 0.
-
Vérifiez la valeur retournée de STATUS_CODE dans la fenêtre Watch.
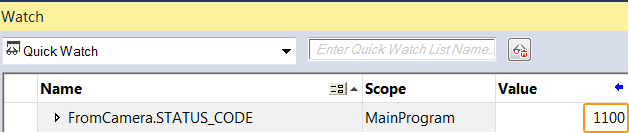
Si les points de vision sont obtenus avec succès, le code d’état 1100 sera retourné. Sinon, le code d’erreur correspondant sera retourné. Veuillez vous référer à Codes d’état et dépannage pour le dépannage. -
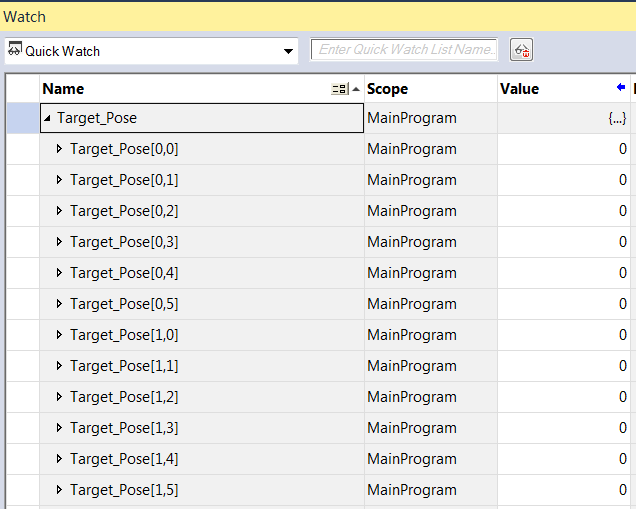
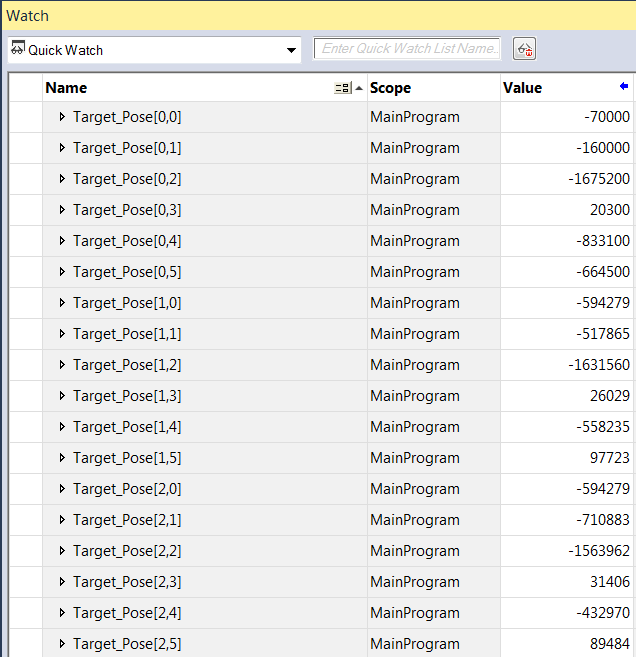
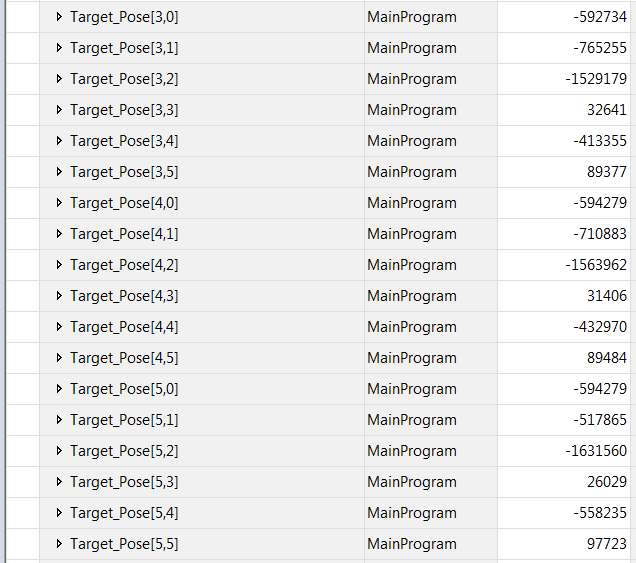
Vérifiez la valeur retournée de Target_Pose.
-
Ajoutez l’étiquette Target_Pose dans la colonne Nom de la fenêtre Watch.
-
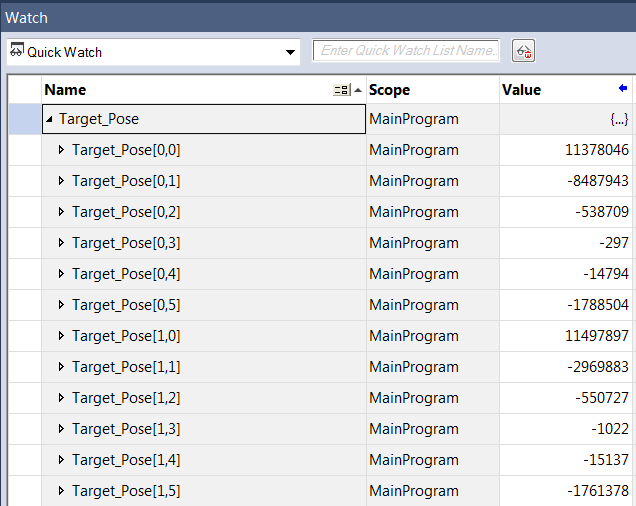
Développez les niveaux et vérifiez les valeurs retournées de Target_Pose. L’exemple dans la figure ci‑dessous a reçu 2 poses. Divisez les valeurs transférées par 10000 pour obtenir les données de pose réelles.
-
Automatiser le processus d’obtention du résultat de vision depuis Mech-Vision
La section ci‑dessus décrit comment obtenir manuellement le résultat de vision depuis Mech-Vision. Pour permettre l’obtention automatique du résultat de vision à partir de Mech-Vision, voir Exemple 1 : MM_S1_Vis_Basic.
Exécuter le projet Mech-Viz et obtenir la trajectoire planifiée
Configurer les programmes
-
À l’échelon 14 du programme CameraTest, définissez la valeur de Camera_User.Step_Num sur 50. Cliquez sur l’étiquette Camera_User.Start_Empty de MM_Empty_Target et modifiez la valeur sur 1 pour effacer le résultat de vision précédemment obtenu. Puis réinitialisez la valeur à 0.

Vérifiez la valeur de Target_Pose après l’effacement du résultat de vision dans la fenêtre Watch.
-
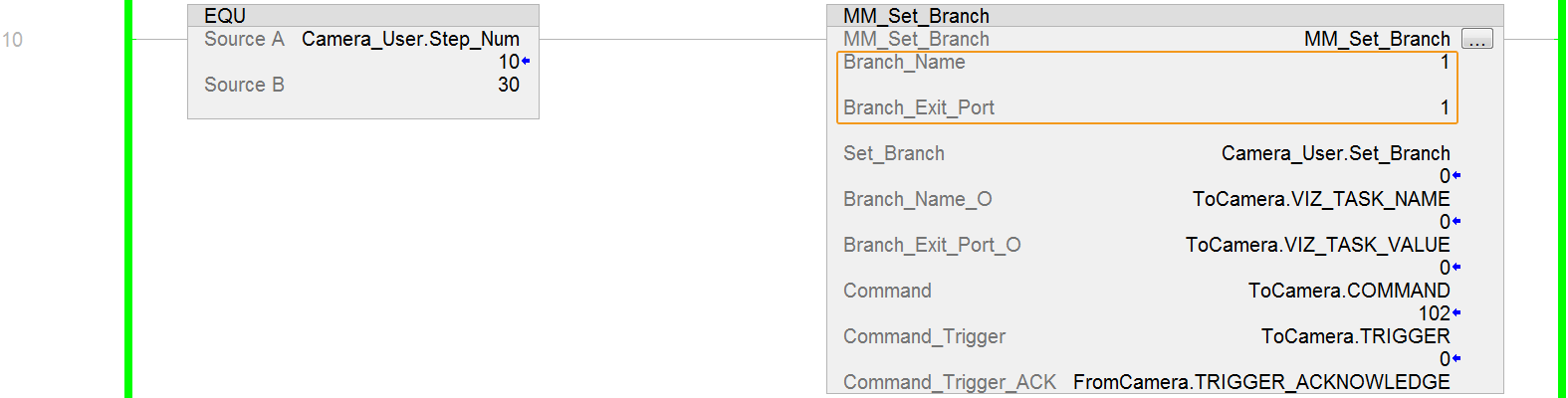
À l’échelon 10 du programme CameraTest, définissez la valeur de Branch_Name sur 1, et le projet s’exécutera le long de l’étape « Branch by Msg » dont l’ID d’étape est 1.
-
À l’échelon 10 du programme CameraTest, définissez la valeur de Branch_Exit_Port sur 1, et le projet Mech-Viz prendra le port de sortie 1 pour l’étape Branch by Msg dont l’ID d’étape est 1.
-
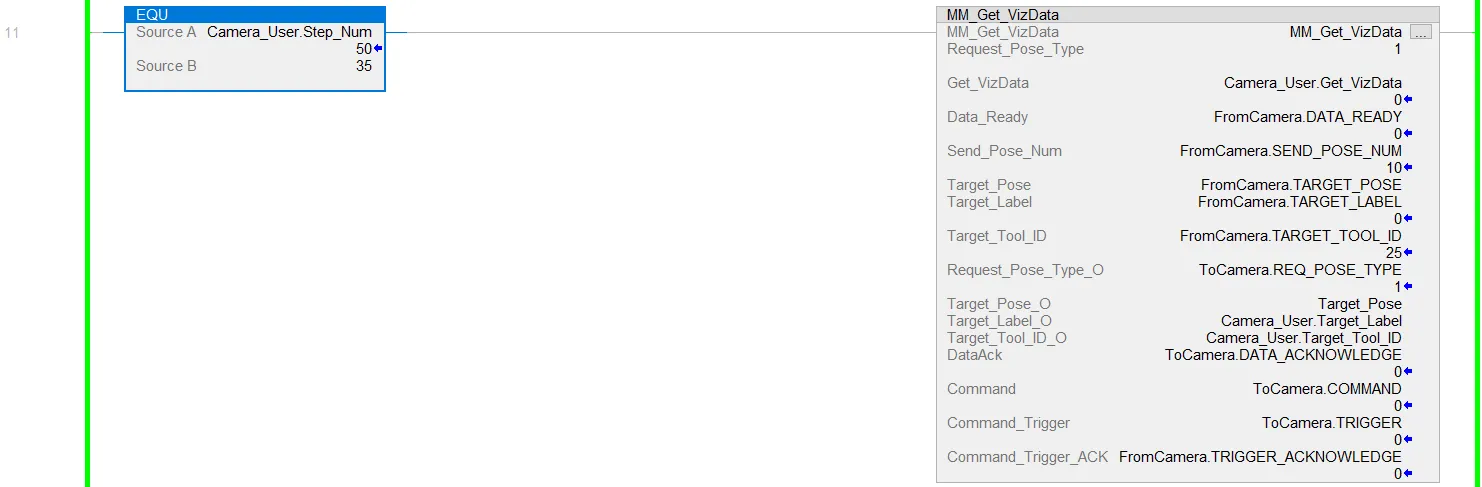
À l’échelon 11 du programme CameraTest, définissez la valeur de Request_Pose_Type sur 1, et Mech-Viz enverra des données sous forme de positions articulaires.
Déclencher l’exécution du projet Mech-Viz
-
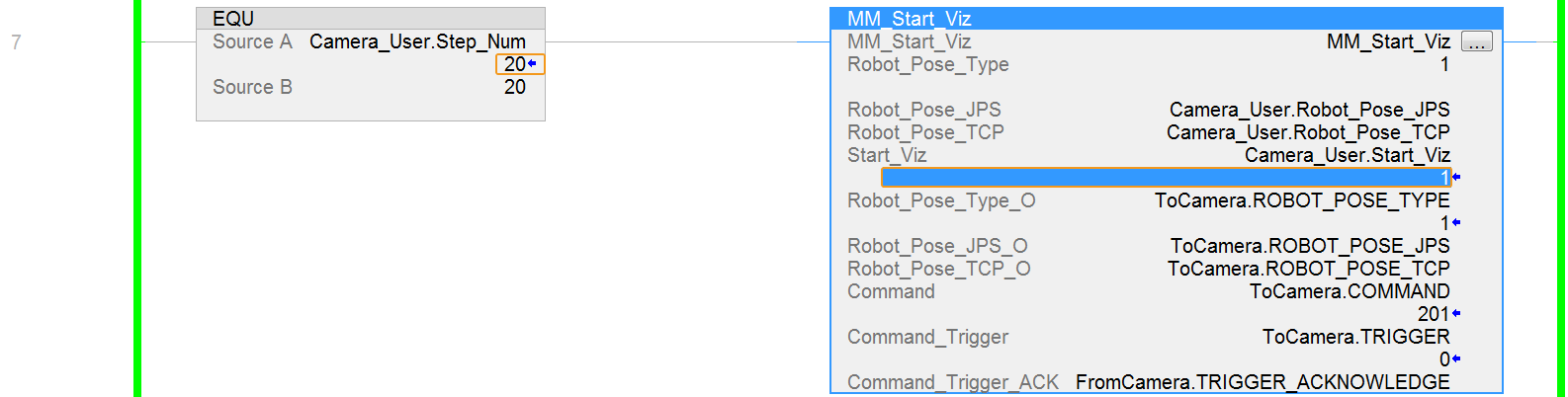
À l’échelon 7 du programme CameraTest, définissez la valeur de Camera_User.Step_Num sur 20. Cliquez sur l’étiquette Camera_User.Start_Viz de MM_Start_Viz et modifiez la valeur sur 1 pour déclencher l’exécution du projet Mech-Viz. Puis réinitialisez la valeur à 0.
-
Vérifiez la valeur retournée de STATUS_CODE dans la fenêtre Watch.
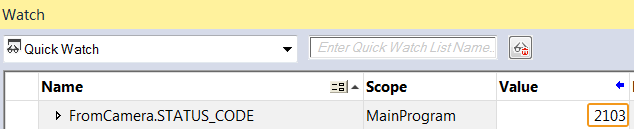
Si le projet Mech-Viz est démarré avec succès, le code d’état 2103 sera retourné. Sinon, le code d’erreur correspondant sera retourné. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
Définir le port de sortie de la branche Mech-Viz
-
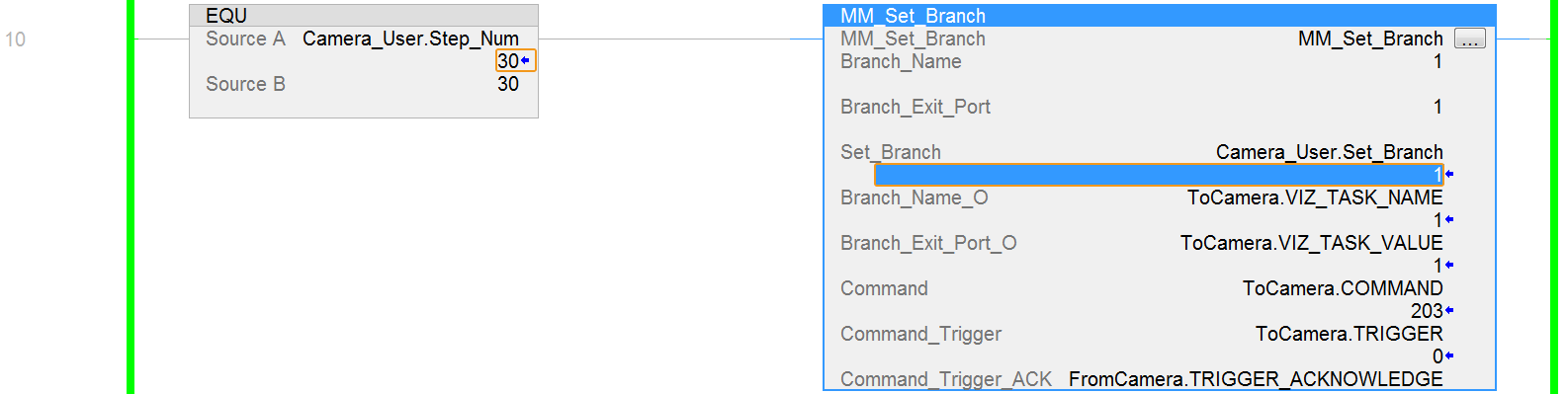
À l’échelon 10 du programme CameraTest, définissez la valeur de Camera_User.Step_Num sur 30. Cliquez sur l’étiquette Camera_User.Set_Branch de MM_Set_Branch et modifiez la valeur sur 1 pour sélectionner le port de sortie de la branche. Puis réinitialisez la valeur à 0.
-
Vérifiez la valeur retournée de STATUS_CODE dans la fenêtre Watch.
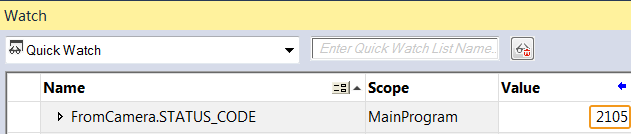
Si la branche est définie avec succès, le code d’état 2105 sera retourné. Sinon, le code d’erreur correspondant sera retourné. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
Obtenir la trajectoire planifiée Mech-Viz
-
À l’échelon 11 du programme CameraTest, définissez la valeur de Camera_User.Step_Num sur 35. Cliquez sur l’étiquette Camera_User.Get_VizData de MM_Get_VizData et modifiez la valeur sur 1 pour obtenir la trajectoire planifiée depuis Mech-Viz. Puis réinitialisez la valeur à 0.
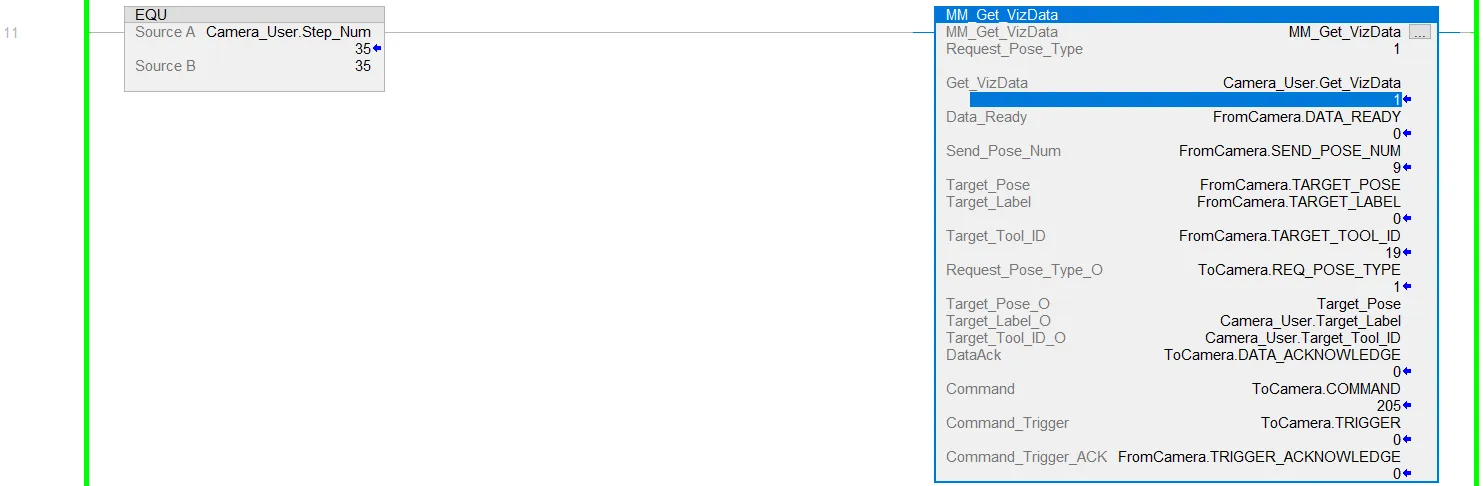
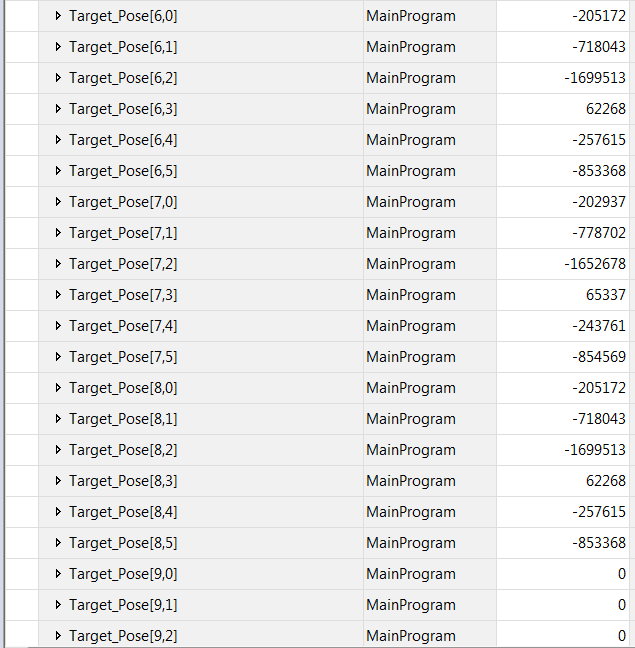
Vous pouvez voir que la valeur de Send_Pose_Num est 9 dans la figure ci‑dessus, ce qui indique que 9 ensembles de positions articulaires sont obtenus dans ce programme d’exemple.
-
Vérifiez la valeur retournée de STATUS_CODE dans la fenêtre Watch.
Si la trajectoire planifiée est obtenue avec succès, le code d’état 2100 sera retourné. Sinon, le code d’erreur correspondant sera retourné. Veuillez vous référer à Codes d’état et dépannage pour le dépannage. -
Vérifiez les valeurs retournées de Target_Pose dans la fenêtre Watch. Divisez les valeurs transférées par 10000 pour obtenir les données de pose réelles.
Automatiser le processus d’obtention de la trajectoire planifiée depuis Mech-Viz
La section ci‑dessus décrit comment obtenir manuellement la trajectoire planifiée depuis Mech-Viz. Pour permettre l’obtention automatique de la trajectoire planifiée depuis Mech-Viz, voir Programme d’exemple 5 : MM_S5_Viz_SetBranch.