Pourquoi les signaux DO ou DI sont-ils parfois activés ou désactivés par anticipation pour les robots ABB dans la communication Maître-Contrôle ?
Problème
Lorsque la communication Maître-Contrôle est établie entre un robot ABB et le système de vision et que le robot n’a pas encore atteint la position cible, des signaux DI ou DO sont activés ou désactivés par anticipation.
Cause
Le bouton d’arrêt est pressé sur le boîtier d’apprentissage (à ce moment-là, le programme de premier plan est arrêté et non réinitialisé), puis le projet Mech-Viz est arrêté (à ce moment-là, le programme d’arrière-plan est arrêté et non réinitialisé). Cela entraîne la non-réinitialisation du programme de premier plan. Lors de la prochaine exécution du programme, les mouvements peuvent devenir chaotiques en raison des positions de mouvement, précédemment envoyées dans le programme de premier plan, qui n’ont pas été effacées. Par conséquent, n’envoyez pas de commandes pendant que le programme de premier plan est arrêté.
Solution
Réinitialisez le programme de premier plan du robot ABB avant d’exécuter le projet Mech-Viz en réalisant les opérations suivantes:
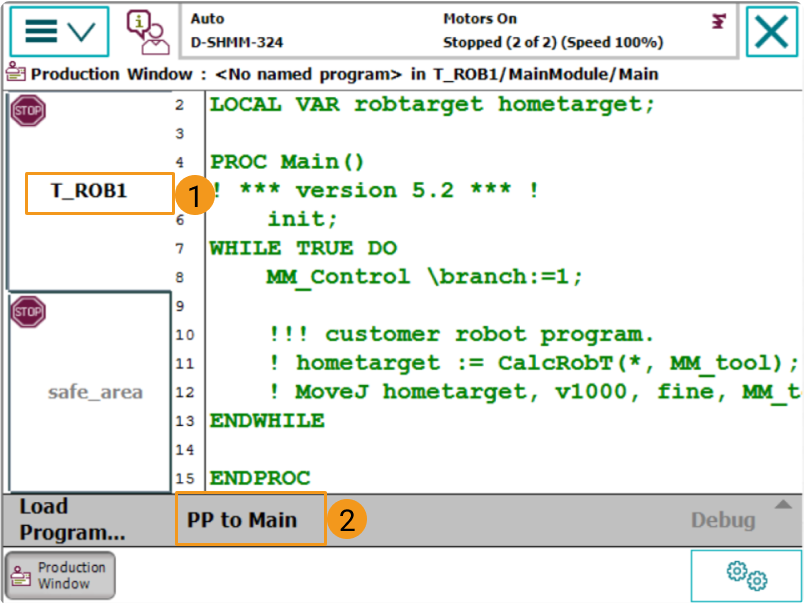
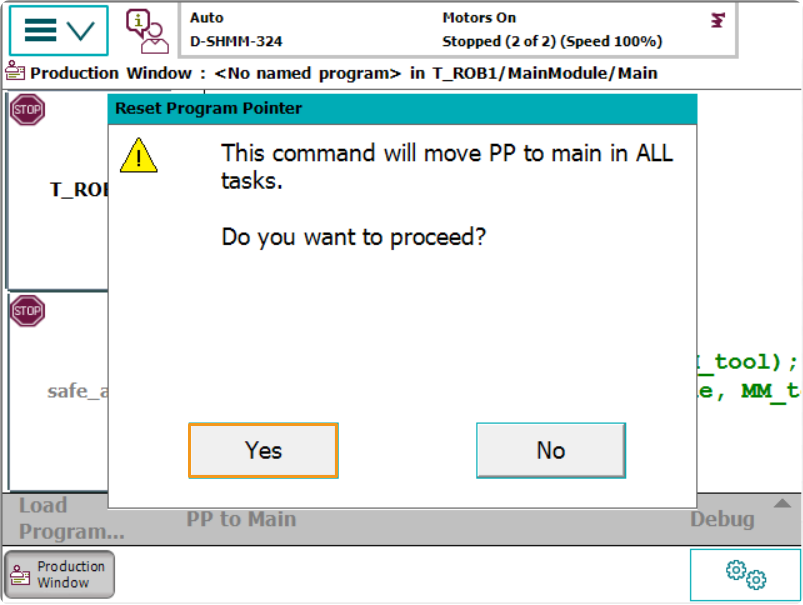
Déplacez le PP de la tâche T_ROB1 vers Main. Après avoir sélectionné PP vers Main, si une fenêtre comme indiqué ci-dessous s’affiche, appuyez sur Oui pour confirmer.