Opérations de base YASKAWA
Ce sujet présente quelques opérations de base des robots YASKAWA.
Définir l’outil au point de vision
Dans cet exemple, l’outil n° 1 est défini pour le registre de position P071.
| Les données de pose de l’outil 0 doivent toutes être à 0. Autrement dit, l’outil 0 a une pose de bride. Ne modifiez pas les données de pose de l’outil 0. |
-
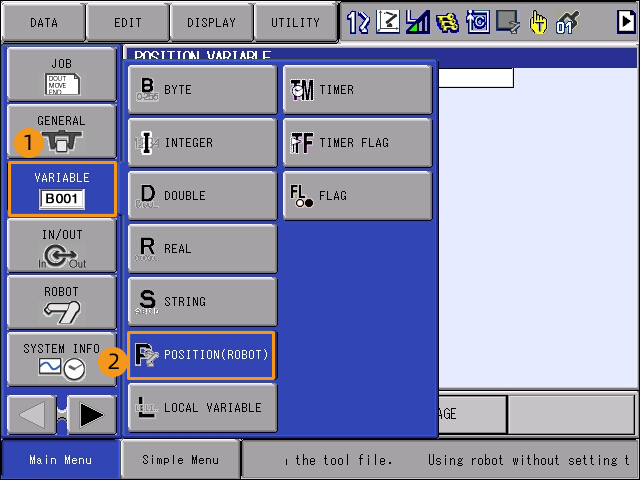
En mode enseignement, sélectionnez un programme et cliquez sur .
-
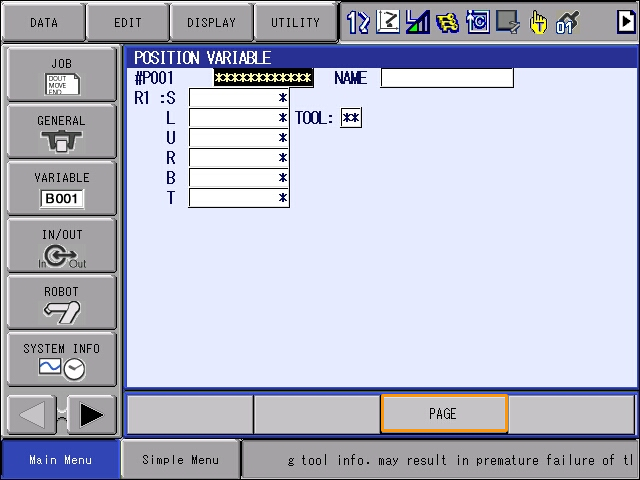
Dans l’interface POSITION VARIABLE, cliquez sur PAGE.
-
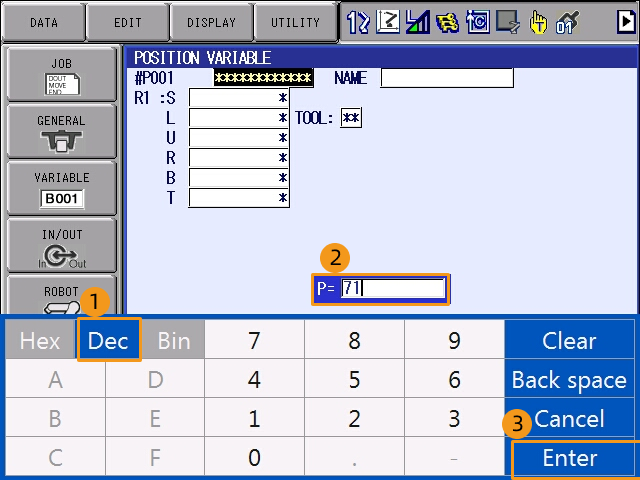
Sur le clavier contextuel, sélectionnez Dec, saisissez 71 (indiquant le registre de position P071), puis cliquez sur Entrée.
-
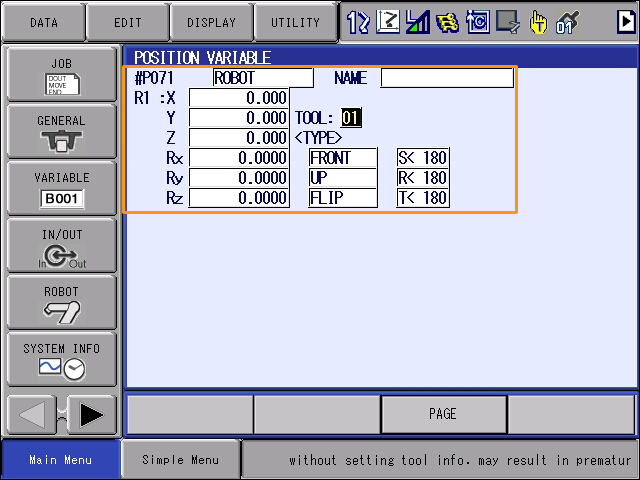
Cliquez sur la case vide à côté de «#P071» pour choisir le repère de référence. Sélectionnez ROBOT dans le menu déroulant.
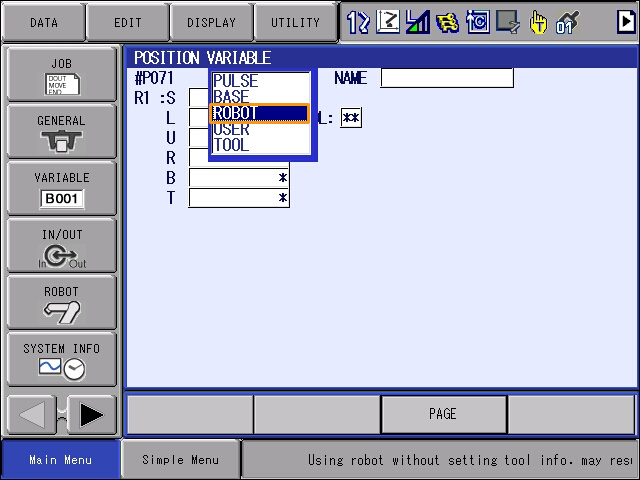
-
Cliquez sur OUTIL. Saisissez 1 (indiquant l’utilisation de l’outil n° 1) avec le clavier contextuel. Cliquez sur Entrée.
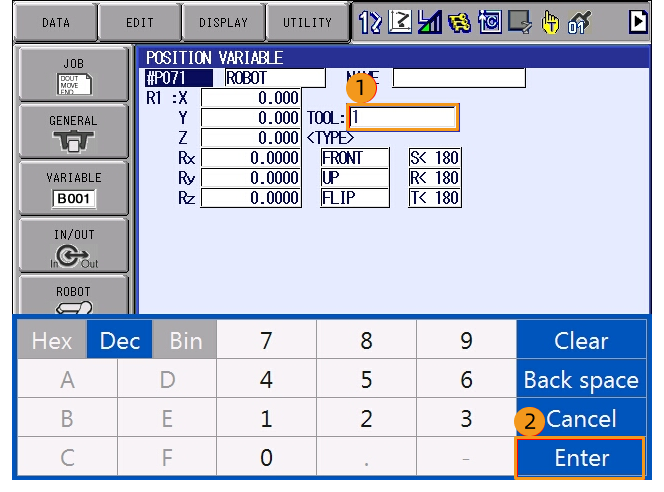
Une fois la configuration terminée, l’interface est la suivante.