FANUC Étalonnage automatique
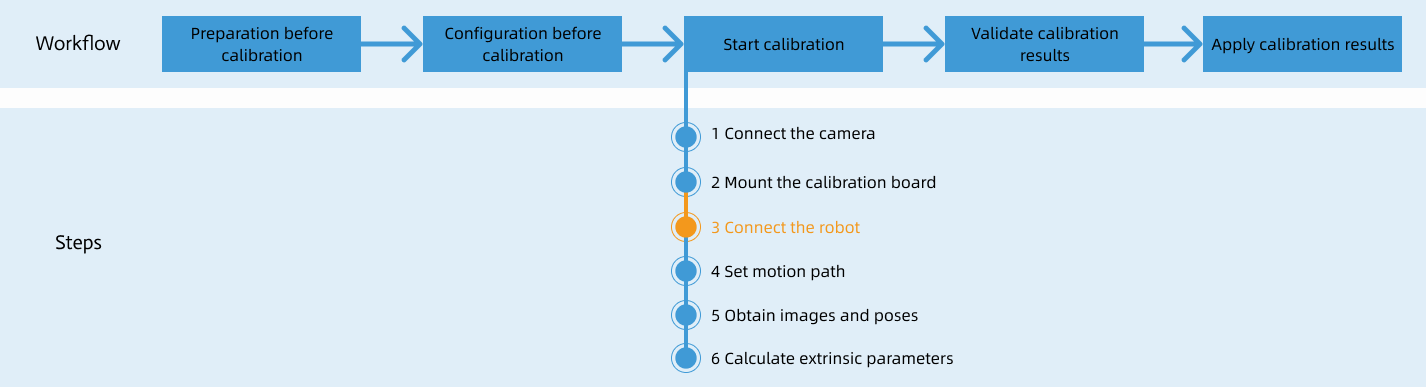
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner et modifier le programme d’étalonnage
-
Basculer le robot en mode manuel : mettez l’interrupteur du boîtier d’enseignement sur ON, et mettez l’interrupteur du contrôleur sur T1 ou T2.
T1 est le mode à basse vitesse, et T2 est le mode à haute vitesse. Il est recommandé aux débutants d’utiliser le mode T1. 

-
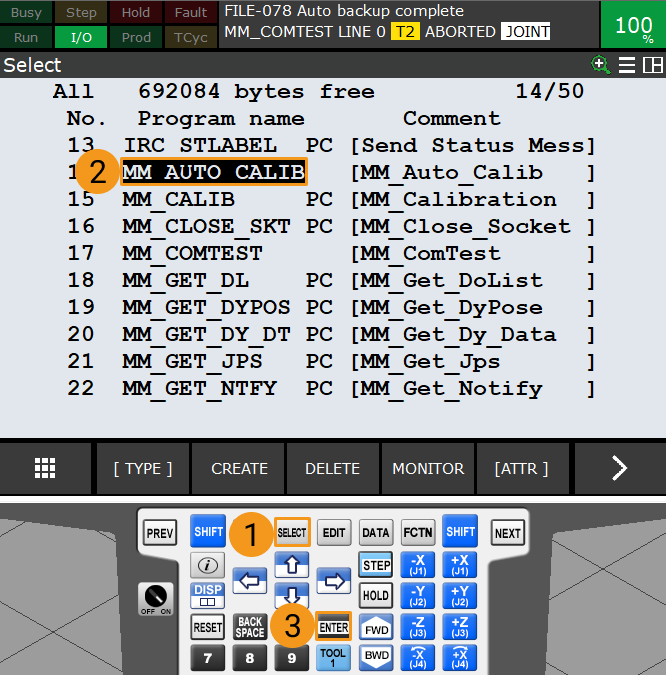
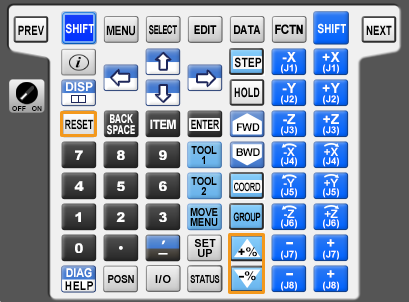
Après avoir chargé les fichiers de programme, appuyez sur la touche SÉLECTION sur le boîtier d’enseignement pour entrer dans l’interface de sélection de programme. Sélectionnez MM_AUTO_CALIB à l’aide des touches fléchées puis appuyez sur ENTRÉE pour ouvrir le programme.
-
Définissez les paramètres de la fonction CALL MM_INIT_SKT dans le programme MM_AUTO_CALIB. Cette fonction comporte quatre paramètres. Sélectionnez l’un des paramètres à l’aide des touches fléchées, appuyez sur F5 pour choisir MODIFIER, puis changez la valeur selon les besoins.
-
Paramètre 1 : Numéro de port du robot. Veuillez sélectionner un port robot parmi les ports 1 à 8.
-
Paramètre 2 : Adresse IP de l’IPC
-
Paramètre 3 : Numéro de port de l’IPC (serveur), qui doit être identique au paramétrage dans Mech-Vision
-
Paramètre 4 : délai d’expiration (min)
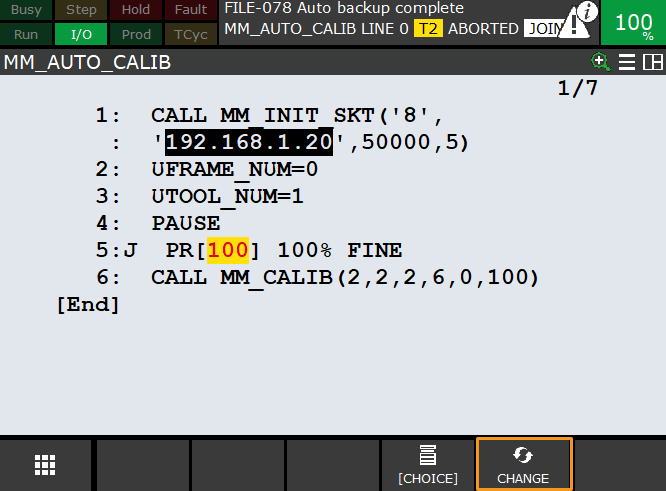
Dans la figure ci-dessus, le système robot V7, V8 ou V9 est utilisé. Dans le système robot V10, la commande MM_CALIB (ligne 6) comprend un paramètre supplémentaire avec une valeur de 99. Ce paramètre est uniquement utilisé en interne par la commande et n’affectera aucune des opérations décrites dans ce document.
-
2. Définir le point de départ de l’étalonnage
-
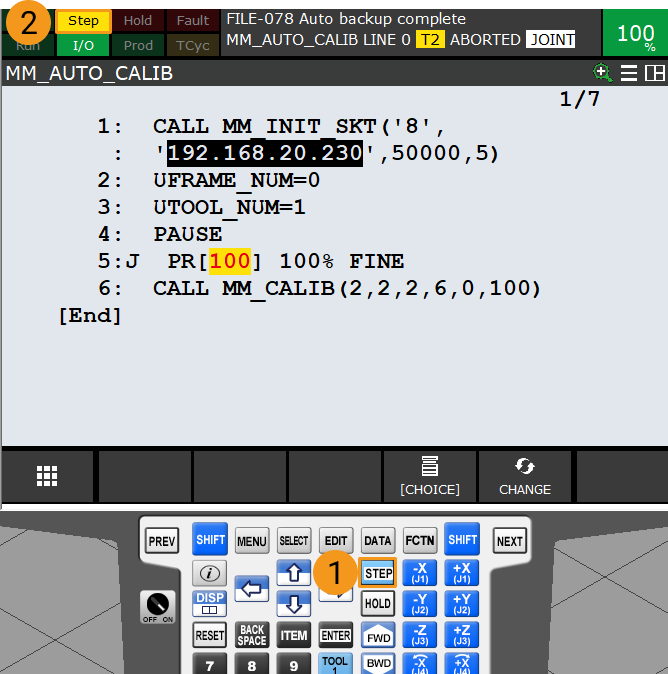
Après l’ouverture du programme, appuyez sur la touche ÉTAPE sur le boîtier d’enseignement pour basculer en mode pas à pas. Ensuite, l’icône Étape à l’écran devient jaune.
-
Maintenez enfoncé l’un des interrupteurs d’homme mort au dos du boîtier d’enseignement. Déplacez le robot jusqu’au point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.

-
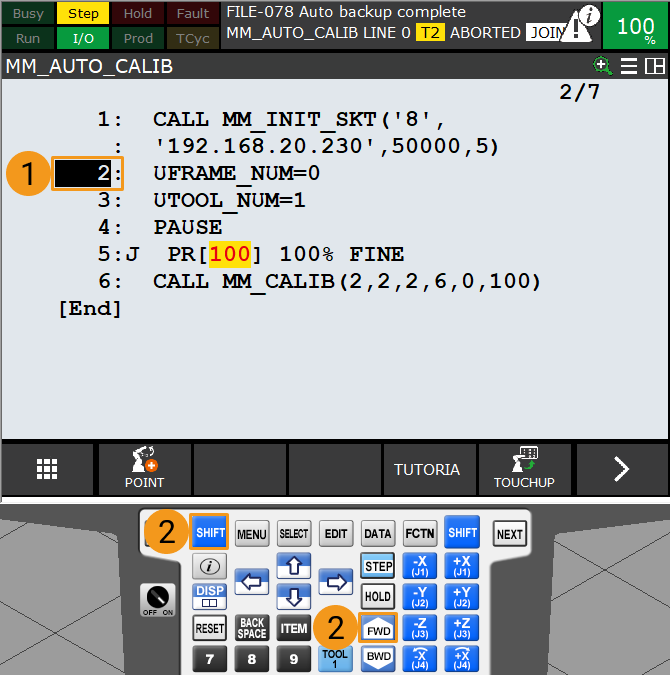
Déplacez le curseur vers la deuxième ligne à l’aide des touches fléchées, et appuyez simultanément sur les touches MAJ et AVANT pour exécuter la commande de la deuxième ligne. Le repère utilisateur 0 sera alors utilisé.
-
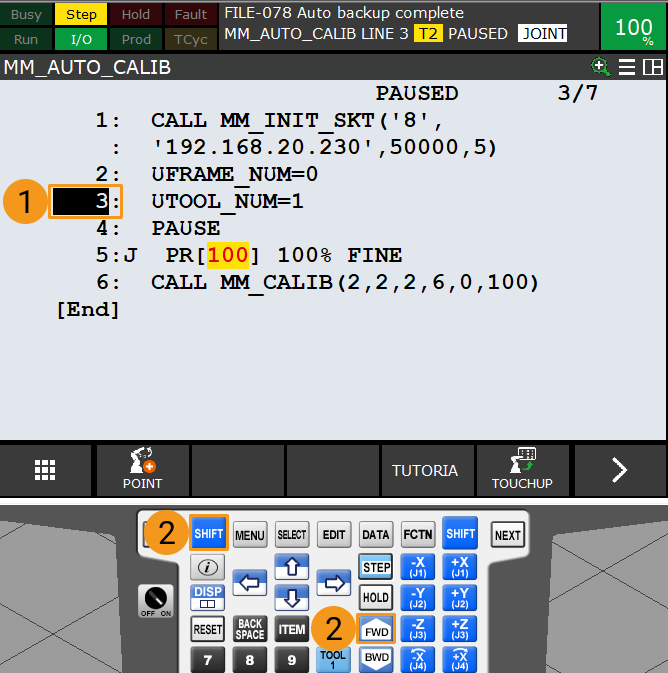
Déplacez le curseur vers la troisième ligne, et appuyez simultanément sur MAJ et AVANT pour exécuter la commande de la troisième ligne. Le repère outil 1 sera alors utilisé.
-
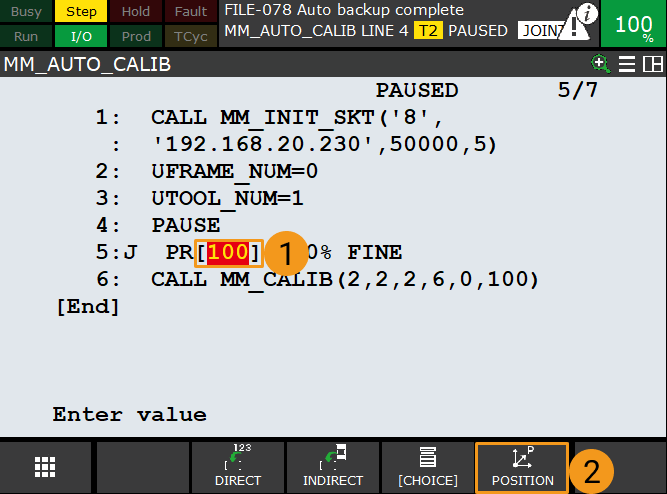
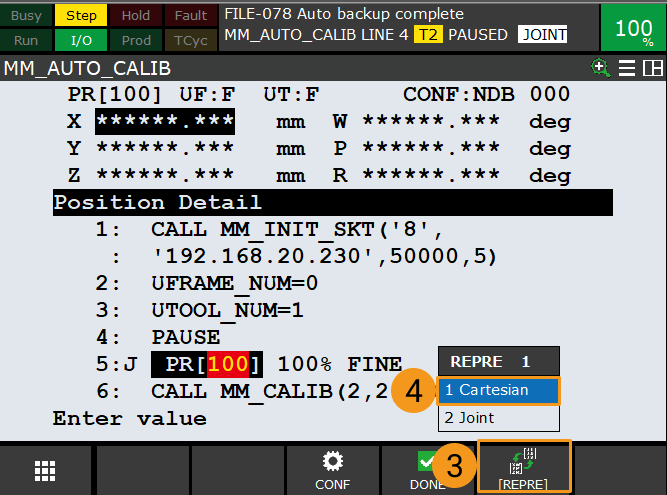
Sélectionnez [100] à l’aide des touches fléchées, et appuyez sur F5 pour choisir POSITION. Puis, appuyez de nouveau sur F5 pour choisir REPRE. Sélectionnez Cartésien à l’aide des touches fléchées et appuyez sur ENTRÉE pour confirmer.
-
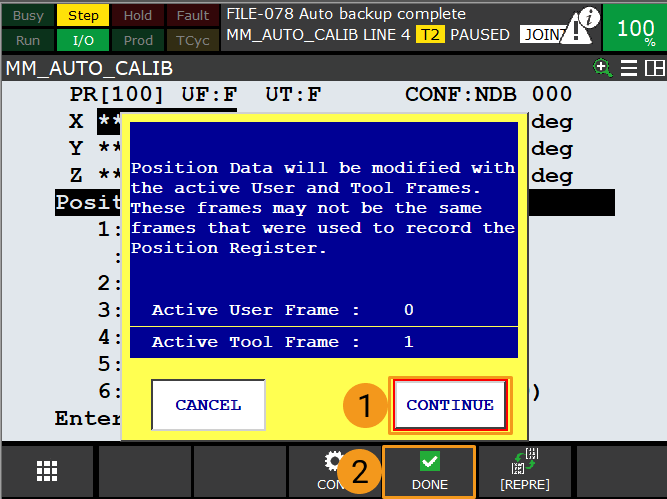
Sélectionnez CONTINUER dans la boîte de dialogue ci-dessous, puis appuyez sur F4 pour choisir TERMINÉ.
-
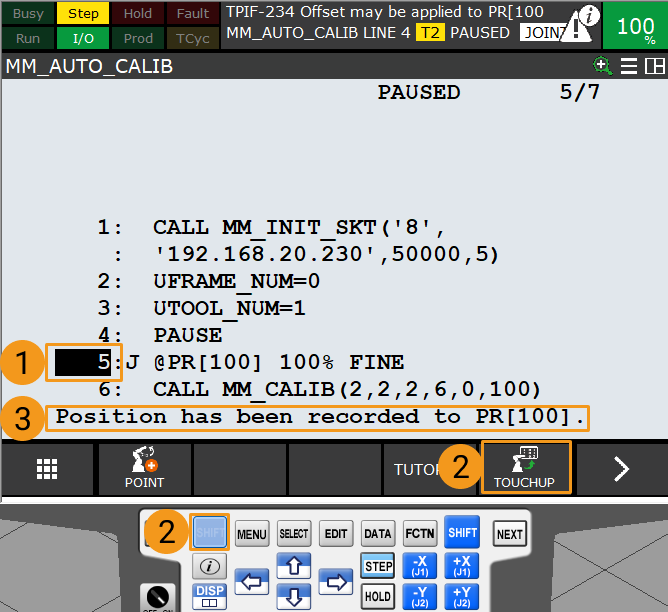
Sélectionnez le numéro de la ligne 5. Ensuite, appuyez simultanément sur MAJ et F5 (pour choisir TOUCHUP). Quand le boîtier d’enseignement affiche le message « La position a été enregistrée dans PR[100] », la pose du robot est stockée dans PR[100].
-
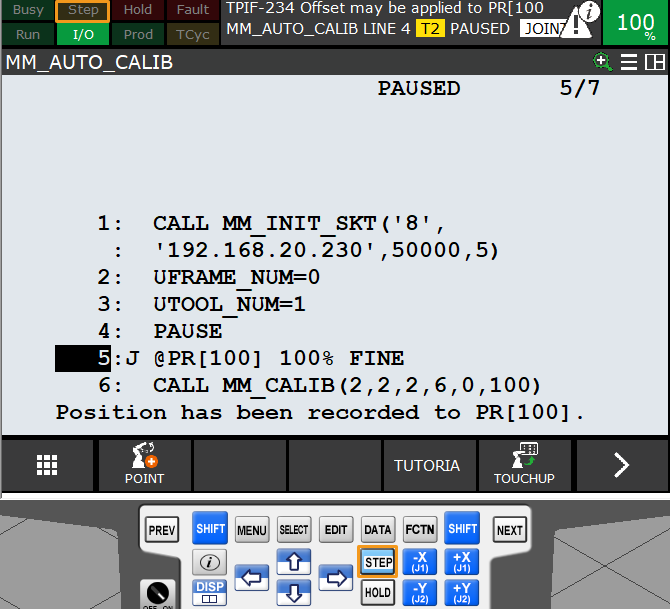
Appuyez sur ÉTAPE sur le boîtier d’enseignement pour quitter le mode pas à pas. Ensuite, l’icône Étape à l’écran devient grise.
3. Exécuter le programme d’étalonnage
-
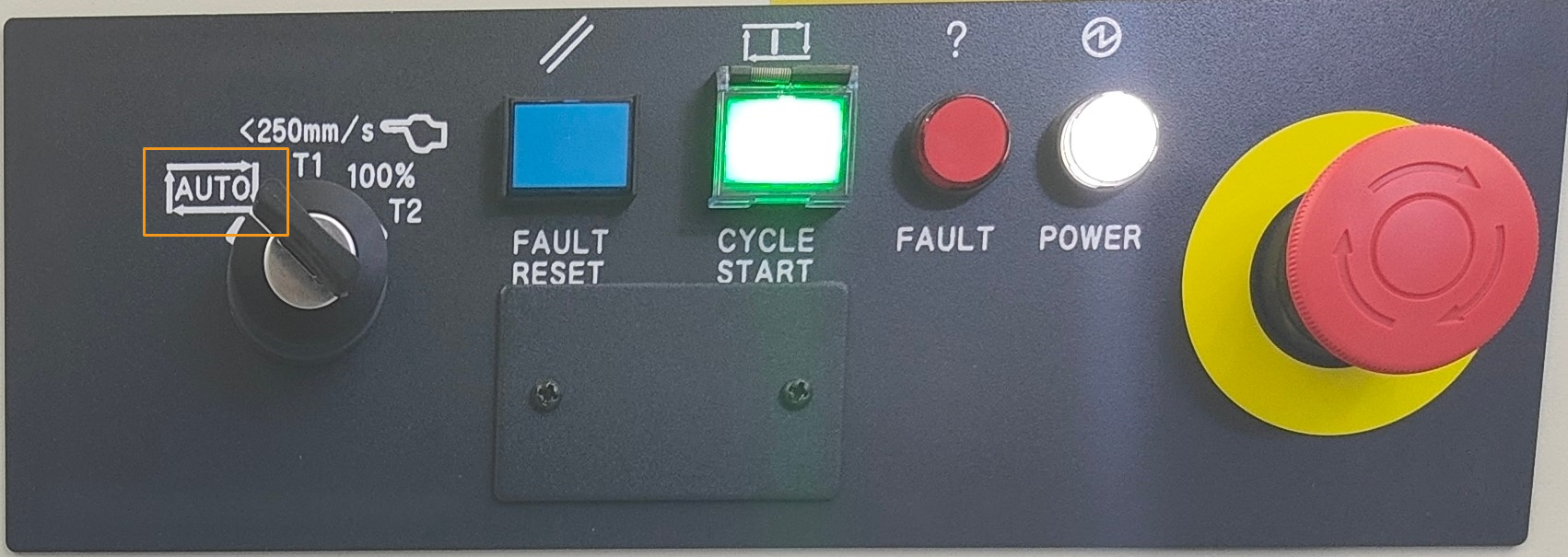
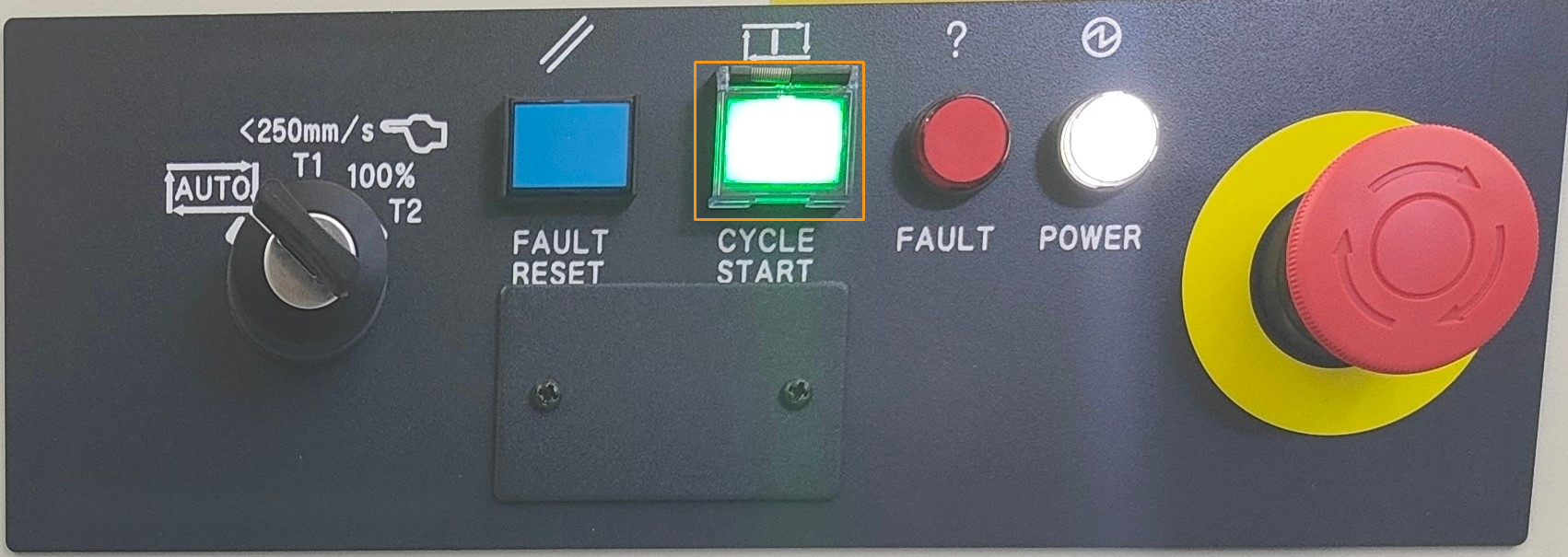
Basculer le robot en mode automatique : mettez l’interrupteur du boîtier d’enseignement sur OFF, et mettez l’interrupteur du contrôleur sur AUTO.

-
Appuyez sur RÉINITIALISER sur le boîtier d’enseignement pour supprimer toutes les alarmes. Puis, réglez la vitesse du robot entre 10% et 20% avec les touches +% et -%.
-
Appuyez sur le bouton vert du contrôleur pour lancer automatiquement le programme d’étalonnage.
-
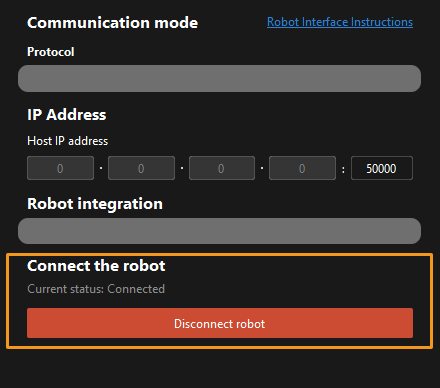
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-