mm_viz_pick_and_place
Le programme déclenche l’exécution du projet Mech-Viz afin d’obtenir la trajectoire planifiée pour la prise et le dépôt de l’objet.
Configurations
Configurations des points
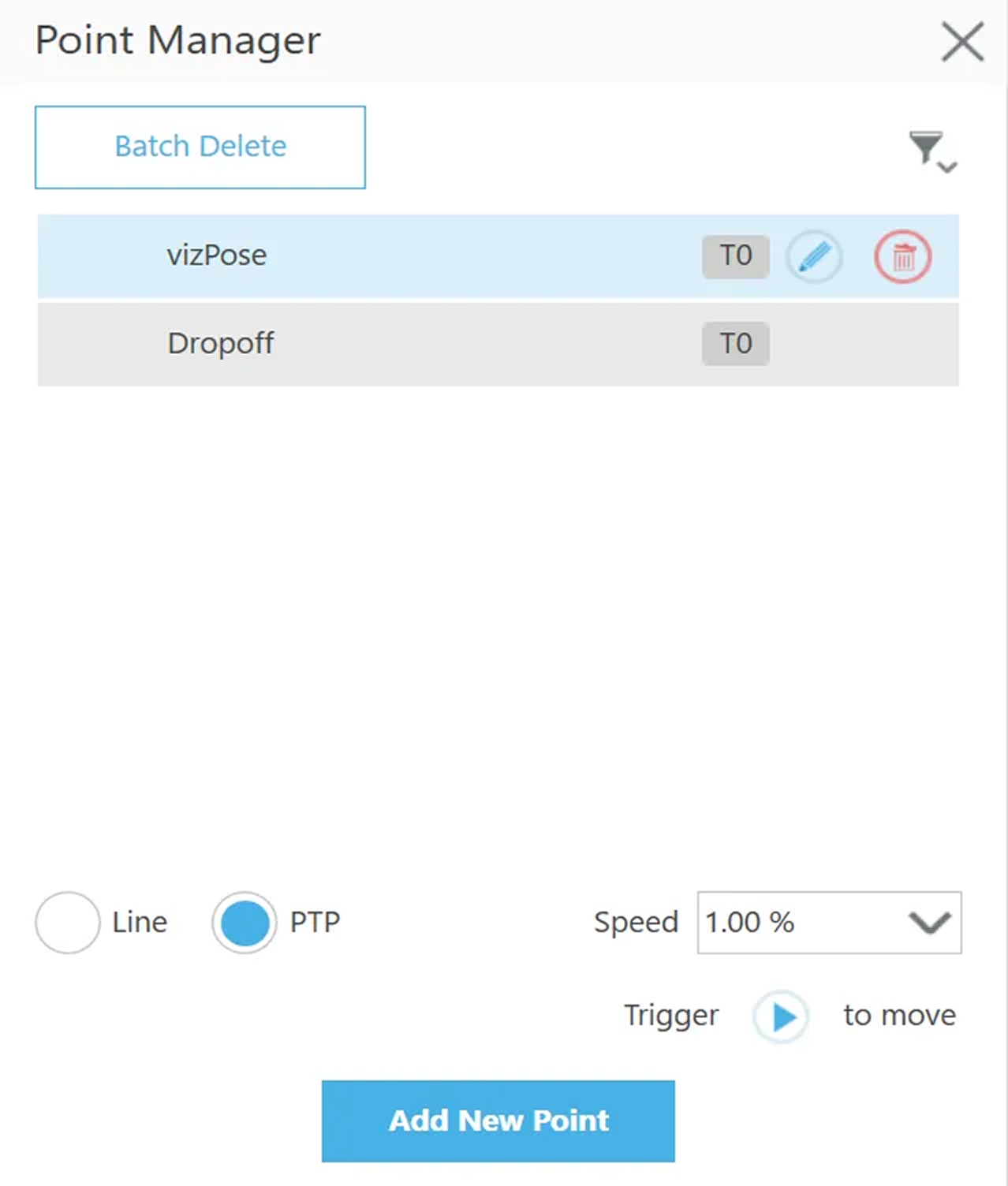
Le programme comporte au total 2 points, comme détaillé ci-dessous.
-
vizPose: Le point attribué en fonction de la trajectoire planifiée renvoyée par Mech-Viz. Il n’est pas nécessaire d’enseigner ce point à l’avance.
-
Dropoff: Le point où le robot dépose l’objet. Vous devez enseigner ce point à l’avance.
Configurations des attributs
Composant MM init
Tous les périphériques réseau du programme sont générés à l’aide de MM init. Ce composant vous permet de modifier l’adresse IP et le numéro de port de l’IPC.
Composant Run Viz
Vous devez spécifier manuellement les valeurs des paramètres du composant Exécuter Viz. Pour des instructions détaillées, voir Modifier les paramètres du composant.
Description du programme
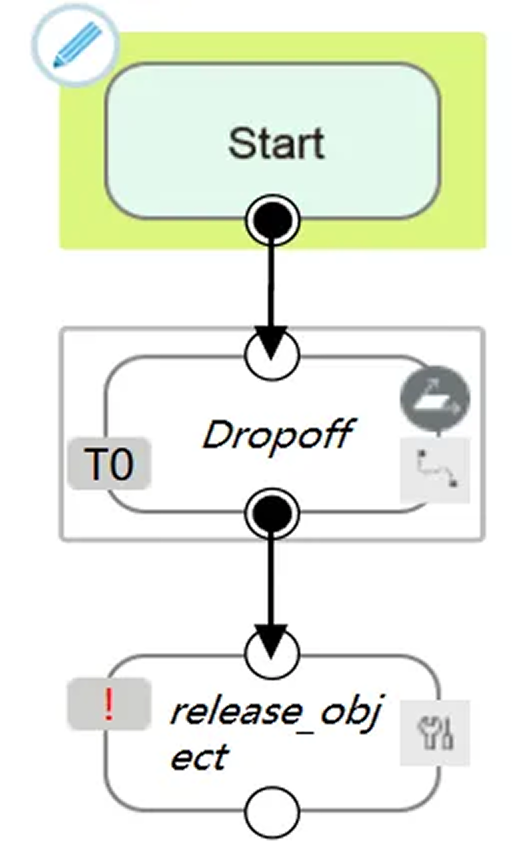
Déposer (place_sequence)
Le nœud release_object ne peut pas être exécuté directement. Vous pouvez modifier ici les valeurs des paramètres pour commander l’outil afin de relâcher.
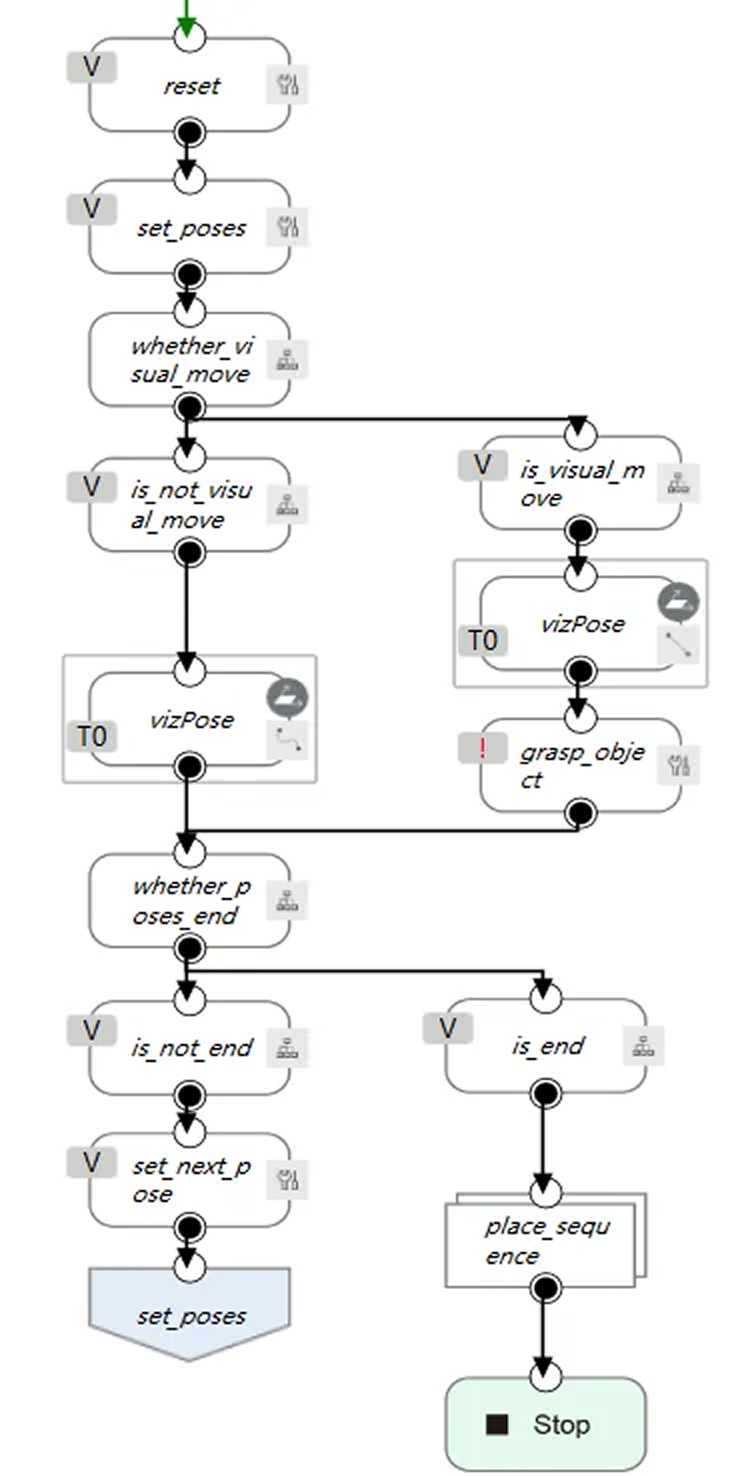
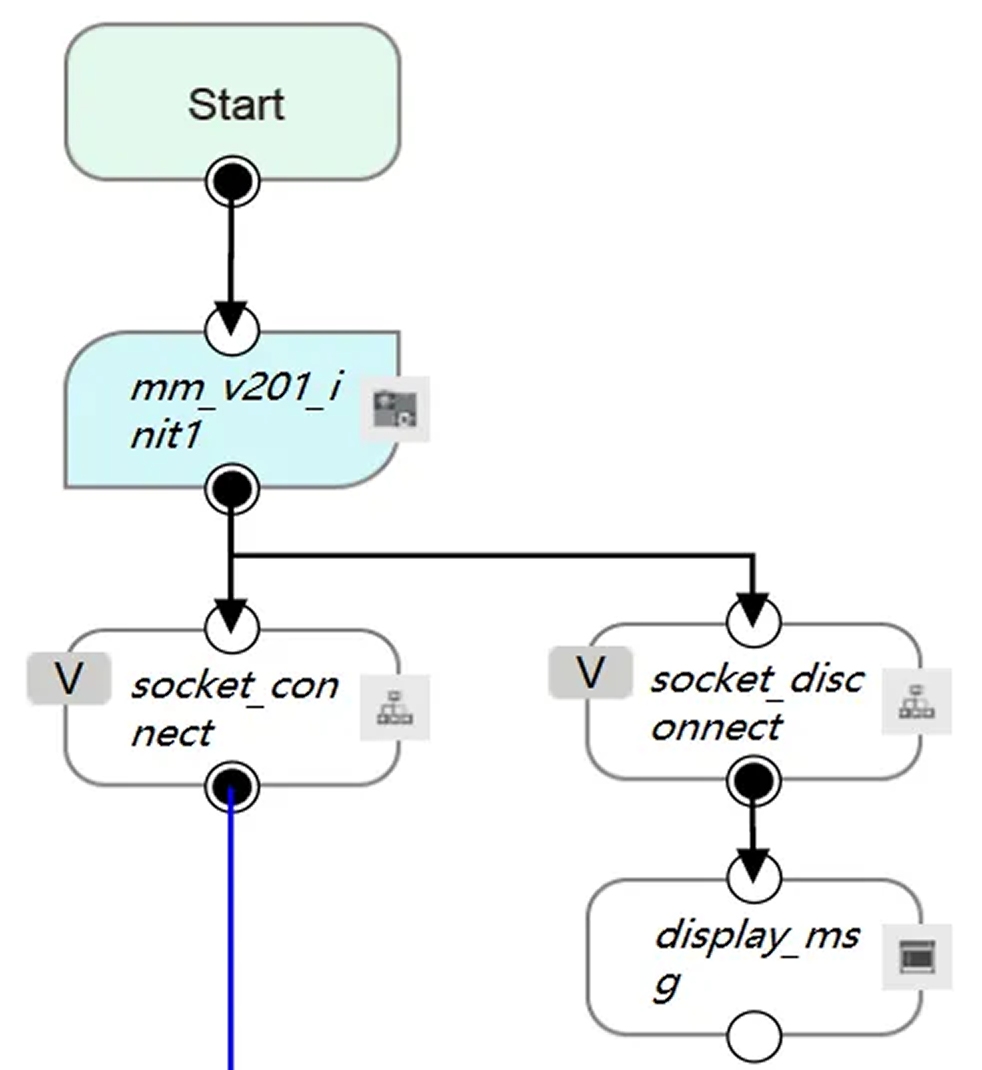
Programme principal (mm_v201_viz_pick_and_place)
-
Tout d’abord, configurez la communication entre le robot et le système de vision à l’aide de mm_v201_init1. Vous pouvez modifier l’adresse IP et le numéro de port de l’IPC dans mm_v201_init1.
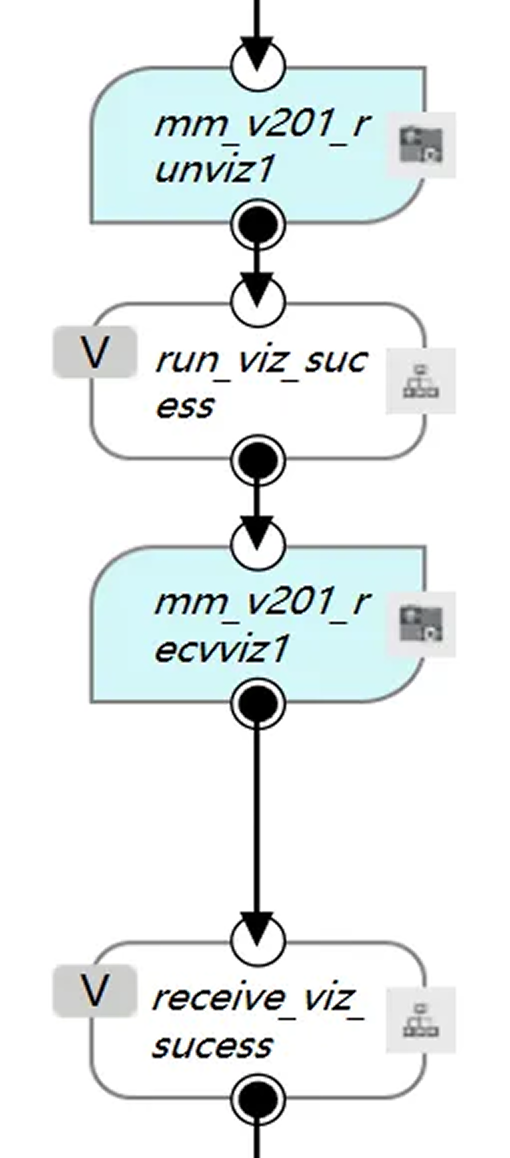
-
Exécutez le projet Mech-Viz et, à l’aide de mm_v201_runvis1, définissez le port de sortie de l’étape Branch by Msg et la valeur de Current Index.
-
Obtenez la trajectoire de mouvement produite par le projet Mech-Viz à l’aide de mm_v201_recvviz1. La trajectoire planifiée reçue de Mech-Viz est stockée dans la variable globale g_mm_socket_recv_array sous forme de chaînes.
-
Affectez la pose du point de passage stockée dans g_mm_socket_recv_array à vizPose et déterminez si le point de passage est un point de passage Vision Move (le point de passage qui correspond à l’étape Vision Move et qui est utilisé comme point de passage de prise). Si le point de passage n’est pas un point de passage Vision Move, le robot se déplace vers le point de passage sous forme de mouvement articulaire. Si le point de passage n’est pas un point de passage Vision Move, le robot se déplace vers le point de passage en ligne droite puis saisit l’objet cible. Le nœud grasp_object ne peut pas être exécuté directement. Vous pouvez modifier ici les valeurs des paramètres pour commander l’outil afin de saisir.
-
Vérifiez si tous les points de passage ont été atteints. S’ils l’ont été, procédez au sous-processus de placement de l’objet cible.