Aperçu rapide de l’Adapter
Introduction à l’Adapter
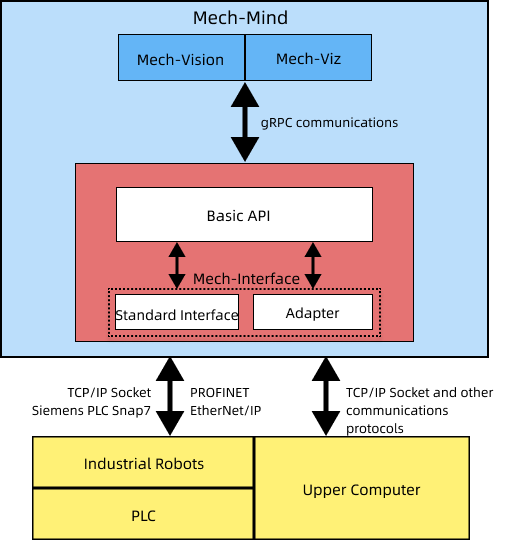
Adapter est un composant intégré utilisé pour la communication avec Mech-Vision et Mech-Viz. Il établit une communication gRPC avec Mech-Vision et Mech-Viz via les interfaces Basic API, et permet la communication avec des dispositifs externes via des protocoles industriels courants, tels que les sockets TCP/IP, HTTP et le protocole Mitsubishi PLC MC.
Fonctions de l’Adapter
Avec l’Adapter, vous pouvez :
-
Contrôler Mech-Vision et Mech-Viz en interne
Catégorie Fonction concernant Mech-Vision
Démarrer le projet Mech-Vision et obtenir la/les cible(s) de vision
Définir le paramètre Step de Mech-Vision
Lire le paramètre Step de Mech-Vision
Changer la recette de Mech-Vision
concernant Mech-Viz
Démarrer le projet Mech-Viz
Arrêter le projet Mech-Viz
Définir le paramètre Step de Mech-Viz
Lire le paramètre Step de Mech-Viz
Définir le numéro de série de la pince
Définir la vitesse du robot
Définir les paramètres de collision du nuage de points
Obtenir l’état de fonctionnement de Mech-Viz
-
Activer des fonctions non liées à la vision telles que la personnalisation de l’interface utilisateur, la création de bases de données, la lecture et l’écriture de fichiers, et la communication avec le système Web
Vous devrez programmer en Python pour activer ces fonctions sur des services externes.
Développement de l’Adapter
Mech-Vision fournit un Générateur d’Adapter pour aider les débutants à générer rapidement un programme Adapter puis à créer un projet Adapter. Pour plus de détails sur le Générateur d’Adapter, reportez-vous à Guide du Générateur d’adaptateur.
Vous pouvez programmer sur la base du programme Adapter généré., ou vous pouvez programmer l’Adapter à partir de zéro.
Déploiement d’un projet Adapter
Après avoir programmé l’Adapter, vous pouvez déployer le programme dans le projet :
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Effectuez les réglages suivants dans la fenêtre Configuration de la communication du robot.
-
Sélectionnez un modèle de robot, puis cliquez sur Suivant.
-
Sélectionnez Adaptateur pour Type de service d’interface.
-
Cliquez sur
 dans la zone de texte de Répertoire du projet d’adaptateur. Sélectionnez un fichier de projet d’adaptateur dans l’explorateur de fichiers qui s’affiche.
dans la zone de texte de Répertoire du projet d’adaptateur. Sélectionnez un fichier de projet d’adaptateur dans l’explorateur de fichiers qui s’affiche. -
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur le bouton Appliquer.

-
-
Assurez-vous que le service d’interface est démarré: l’interrupteur « Configuration de la communication du robot » sur la barre d’outils de Mech-Vision est basculé et devient bleu.

Maintenant, vous avez terminé de créer un projet d’adaptateur.
Après avoir lu cette section, vous pouvez générer votre premier programme Adapter conformément à Guide du Générateur d’adaptateur.