Client PLC Siemens – Automate Siemens SIMATIC S7 (SIMATIC Manager Step7)
Ce sujet fournit des instructions pour configurer la communication via l’interface standard basée sur le protocole Snap7 des PLC Siemens entre un PLC Siemens SIMATIC S7 et Mech-Vision et Mech-Viz à l’aide du logiciel SIMATIC Manager STEP7.
Prérequis matériels et logiciels
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
-
Les automates Siemens de la série S7 suivants sont pris en charge:
-
S7-300 : Port réseau PN intégré ou CP343-1
-
S7-400 : Port réseau PN intégré ou CP443-1
-
-
Adaptateur secteur 220 V CA vers 24 V CC
-
IPC ou hôte du système de vision de Mech-Mind
-
Câble Ethernet
Logiciel
-
Logiciel de programmation PLC Siemens SIMATIC Manager Step7 V5.6
-
Versions de Mech-Vision et Mech-Viz : 1.7.0 ou supérieure
-
Fichier d’interface de communication entre le système de vision et S7 : MM_Interface_Step7.AWL
Le fichier MM_Interface_Step7.AWL est stocké sur l’IPC ou l’hôte Mech-Mind. Il se trouve dans Communication Component/Robot_Interface/Siemens Snap7/Simatic Manager-STEP7 dans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés.
|
Créer et déployer le projet PLC
Créer un projet PLC
-
Ouvrez le logiciel SIMATIC Manager, puis cliquez sur Nouveau
 dans l’angle supérieur gauche. Saisissez le Nom du projet et l’Emplacement de stockage dans la fenêtre contextuelle.
dans l’angle supérieur gauche. Saisissez le Nom du projet et l’Emplacement de stockage dans la fenêtre contextuelle.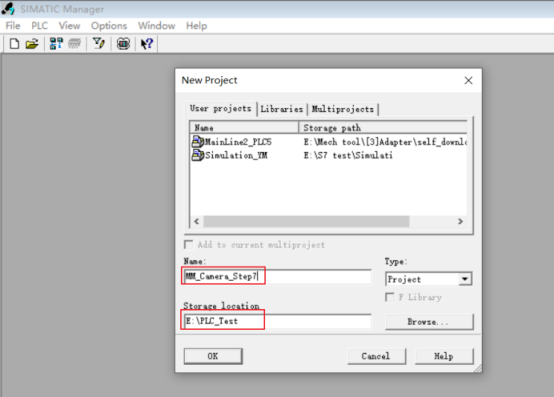
N’incluez PAS de caractères chinois dans le nom du chemin. -
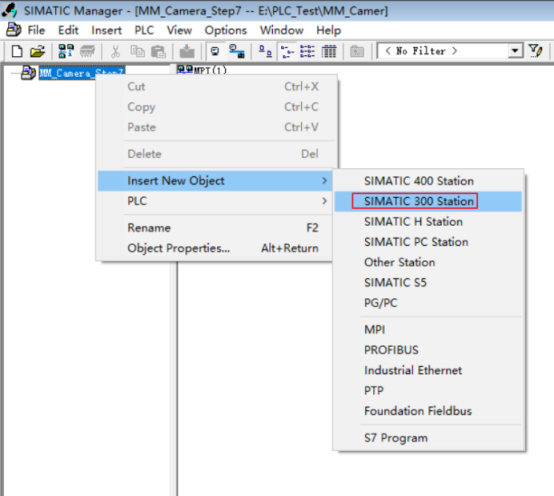
Faites un clic droit sur MM_Camera_Step7, sélectionnez . Après insertion, faites un clic droit et sélectionnez Ouvrir le projet pour entrer dans l’interface de configuration matérielle.
-
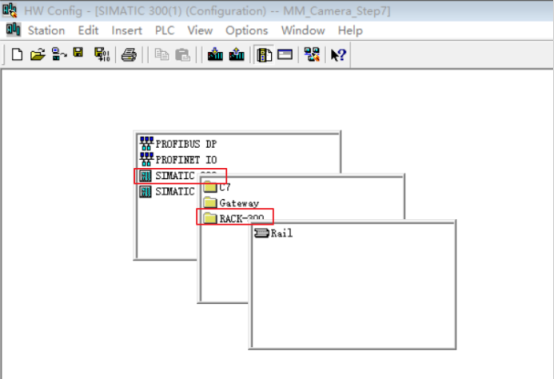
Cliquez avec le bouton droit sur l’espace vide de l’interface de configuration matérielle, puis sélectionnez pour insérer le rail de montage.
-
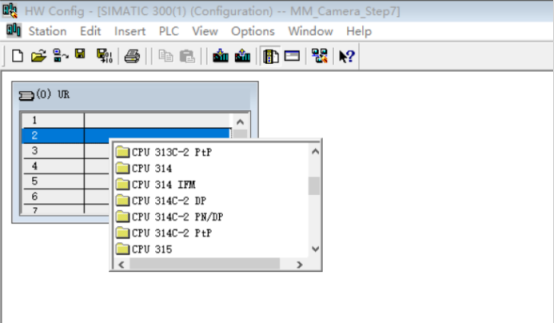
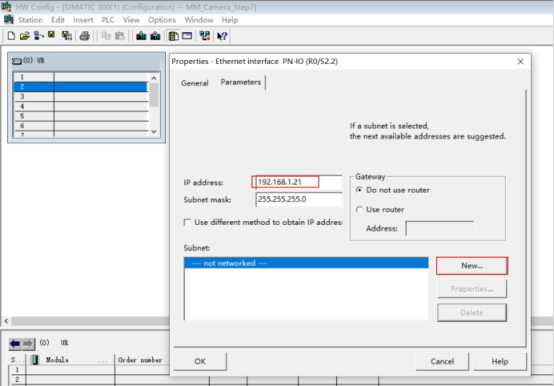
Cliquez avec le bouton droit sur l’emplacement de la deuxième rangée du rail de montage, puis sélectionnez Insérer un objet ; choisissez le module correspondant au CPU du PLC (le module doit prendre en charge le port réseau PN), et la fenêtre Propriété de l’interface Ethernet s’affichera.
-
Après avoir configuré l’adresse IP, cliquez sur Nouveau sous-réseau (le nom du sous-réseau peut être laissé par défaut), puis sélectionnez le sous-réseau nouvellement créé et cliquez sur OK.
-
Cliquez sur Compiler et enregistrer
 dans la barre de titre, puis fermez la fenêtre Configuration matérielle.
dans la barre de titre, puis fermez la fenêtre Configuration matérielle.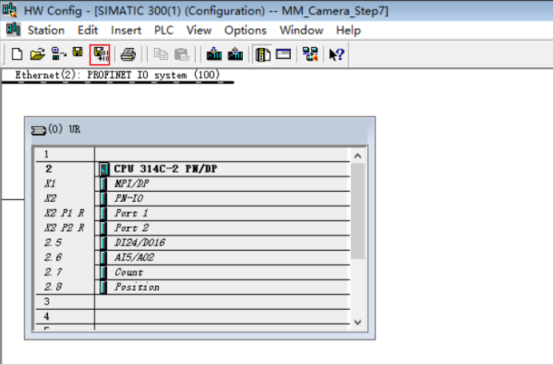
Importer l’interface de communication S7
-
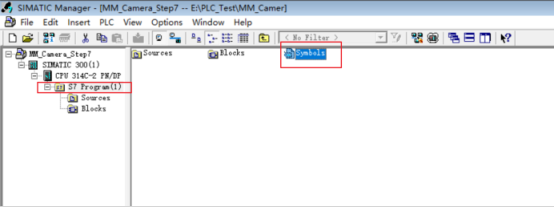
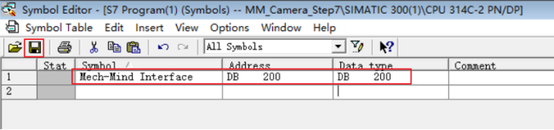
Revenez à l’interface principale de SIMATIC Manager, sélectionnez Programme S7, cliquez avec le bouton droit, ouvrez la table Symboles, ajoutez une nouvelle Interface de symboles Mech-Mind, et choisissez un numéro inoccupé pour le numéro de DB dans la colonne d’adresse.
Après l’ajout du nouveau symbole, l’interface devrait ressembler à la figure ci-dessous. Confirmez les paramètres et cliquez sur Enregistrer
 .
.
-
Cliquez avec le bouton droit sur Sources dans la section du projet à gauche, sélectionnez successivement , puis sélectionnez MM_Interface_Step7.AWL dans la fenêtre contextuelle et ouvrez-le.
Le fichier MM_Interface_Step7.AWL est stocké sur l’IPC ou l’hôte Mech-Mind. Il se trouve dans Communication Component/Robot_Interface/Siemens PLC/Simatic Manager-STEP7dans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés.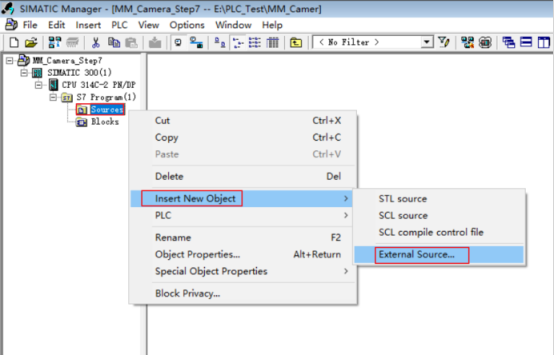
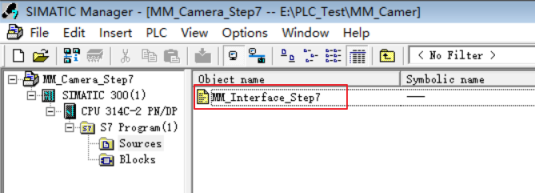
Après l’importation du fichier, cela ressemblera à ceci :
-
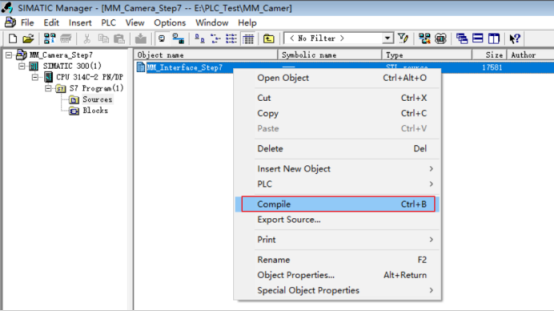
Cliquez avec le bouton droit sur MM_Interface_Step7, sélectionnez Compiler, puis fermez la fenêtre après la réussite de la compilation.
-
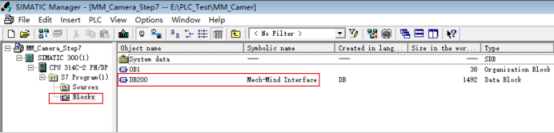
Sélectionnez Blocs, cliquez avec le bouton droit et sélectionnez Détails, et vous pouvez constater que Interface Mech-Mind a été importée avec succès.
-
Cliquez avec le bouton droit sur SIMATIC 300 dans la section du projet à gauche. Cliquez sur Télécharger
 sur la barre d’outils pour télécharger le projet vers le CPU.
sur la barre d’outils pour télécharger le projet vers le CPU.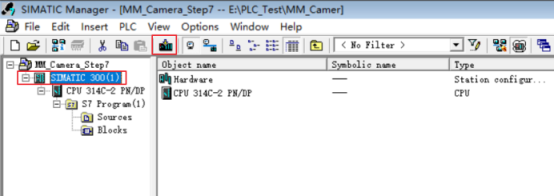
Configurer et démarrer la communication
Configurer la communication du robot
-
Assurez-vous que l’adresse IP de l’IPC est sur le même sous-réseau que le PLC, par exemple 192.168.1.10. Ouvrez l’Invite de commandes sur l’IPC et effectuez un ping de l’adresse IP du PLC pour vérifier si la connexion est établie avec succès.
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
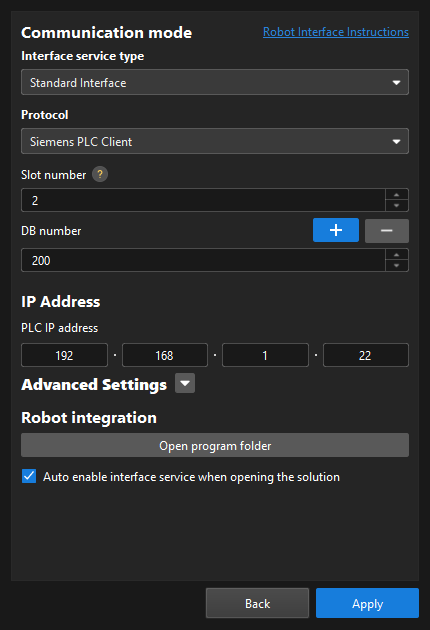
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface, et sélectionnez Siemens PLC Client pour Protocole. Définissez le numéro d’emplacement sur 2, et définissez le numéro de DB (c.-à-d. l’ID de “Mech-Mind Interface” dans le projet PLC) sur 200.
-
Définissez l'adresse IP du PLC sur 192.168.1.21 (c.-à-d. l’adresse IP du PLC définie précédemment dans SIMATIC Manager)
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
Démarrer la communication
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de communication du robot dans la barre d’outils est activé et est passé au bleu. La connexion au PLC est réussie si l’onglet Console du panneau Journal de Mech-Vision affiche Connexion au serveur PLC réussie. Sinon, veuillez vérifier la configuration et si la connexion physique est normale.

-
Démarrez les projets Mech-Vision et Mech-Viz déployés.
-
Pour l’utilisation spécifique des DB et des instructions de communication de l’interface, reportez-vous à Automate Siemens (PLC). Pour l’utilisation du système de vision, reportez-vous à Client PLC Siemens - PLC Siemens SIMATIC S7 (TIA Portal) - Commandes.