Configurer la communication via l’Interface standard avec ABB (RobotWare 6)
Ce guide explique comment charger les fichiers du programme de l’Interface standard sur un robot ABB et configurer la communication via l’Interface standard entre Mech-Mind Vision System et le robot.
| Dans cette section, vous allez charger le programme d’Interface standard du robot et les fichiers de configuration sur le système du robot afin d’établir la communication via l’Interface standard entre le système de vision et le robot. |
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Modèle de contrôleur : IRC4 ou IRC5
-
Version de RobotWare : 6.02–6.15
-
Module de contrôle : 616-1 PC Interface installé
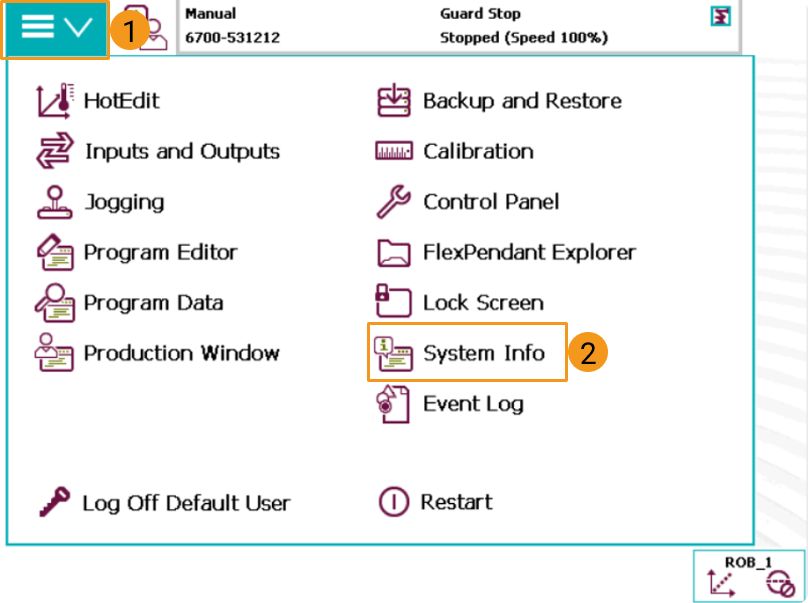
Cliquez ici pour les instructions
-
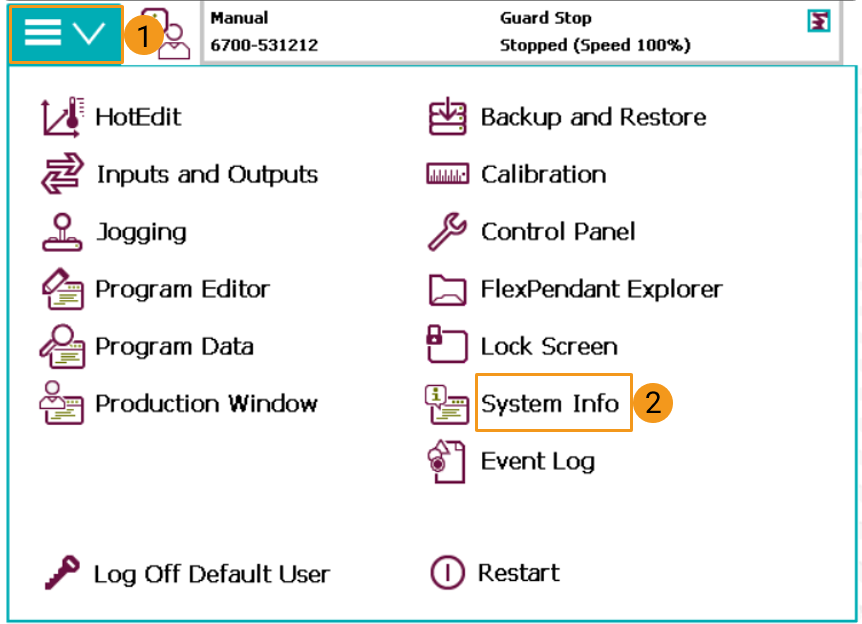
Appuyez sur le bouton déroulant dans la barre de menu en haut à gauche de l’interface du boîtier d’enseignement et sélectionnez Informations système.
-
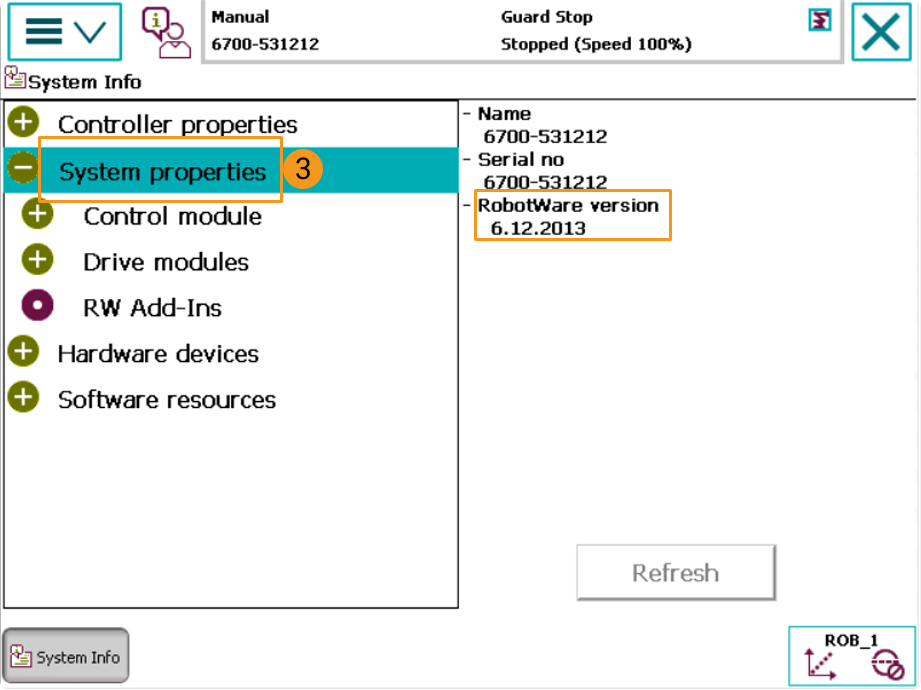
Appuyez sur Propriétés du système et vérifiez que la version de RobotWare est comprise entre 6.02 et 6.15 inclus.
-
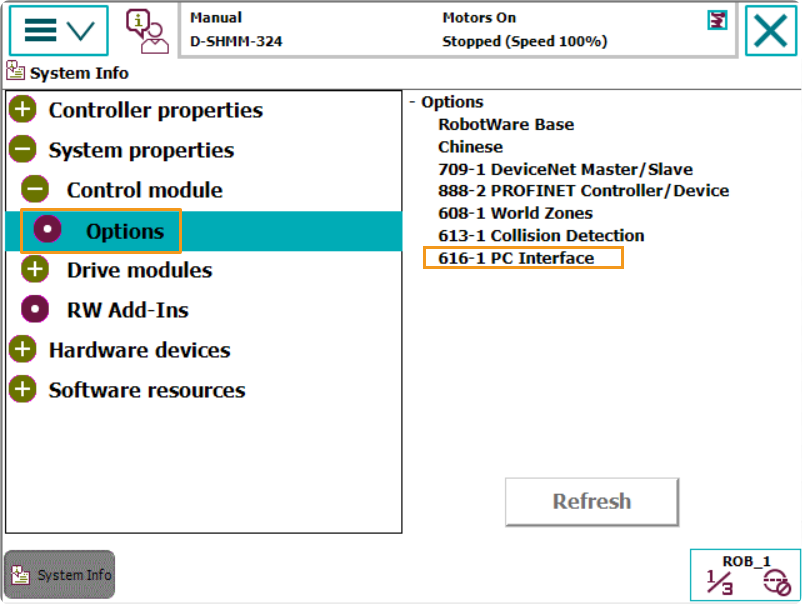
Appuyez sur Options, et vérifiez que le module de contrôle 616-1 PC Interface est installé.
-
Configurer la connexion réseau
Connecter le matériel
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre sur le port X6 (port WAN) du contrôleur du robot, comme illustré ci‑dessous.

Définir l’adresse IP
-
Vous pouvez définir l’adresse IP du robot à l’aide du boîtier d’enseignement ou de RobotStudio.
-
Définir l’adresse IP à l’aide du boîtier d’enseignement
Cliquez ici pour les instructions
-
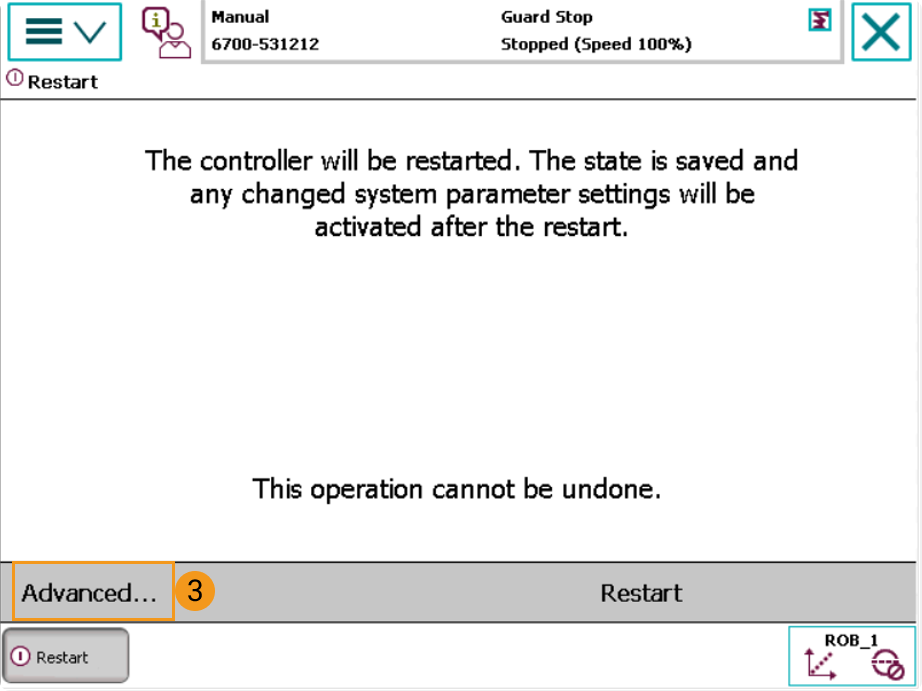
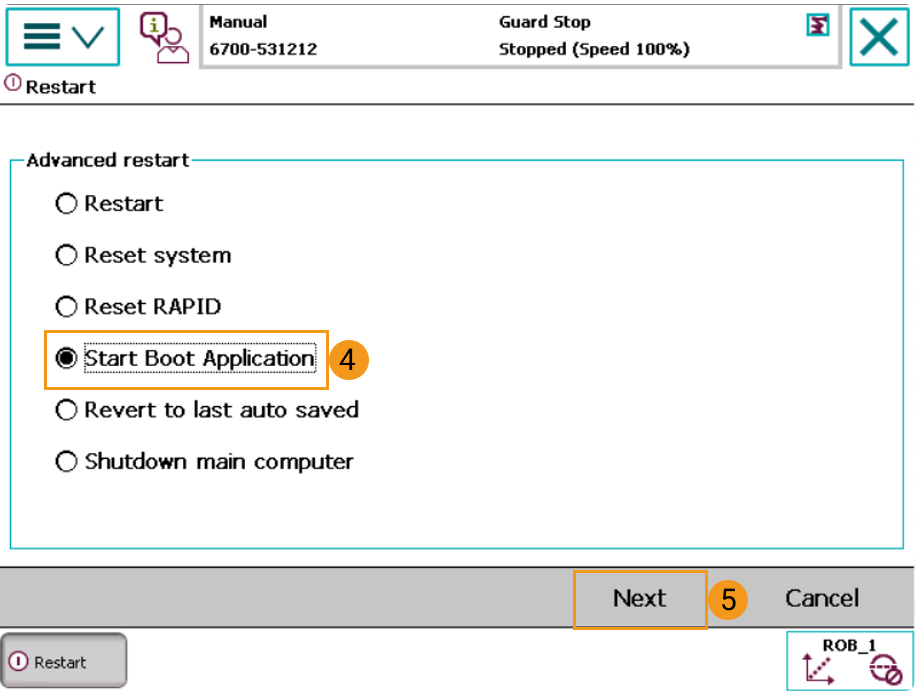
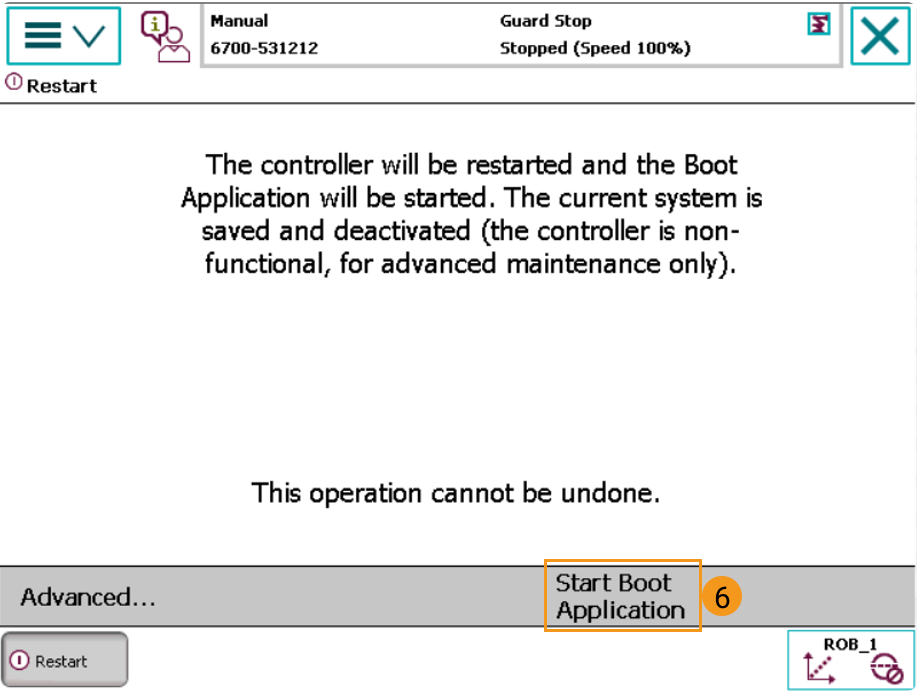
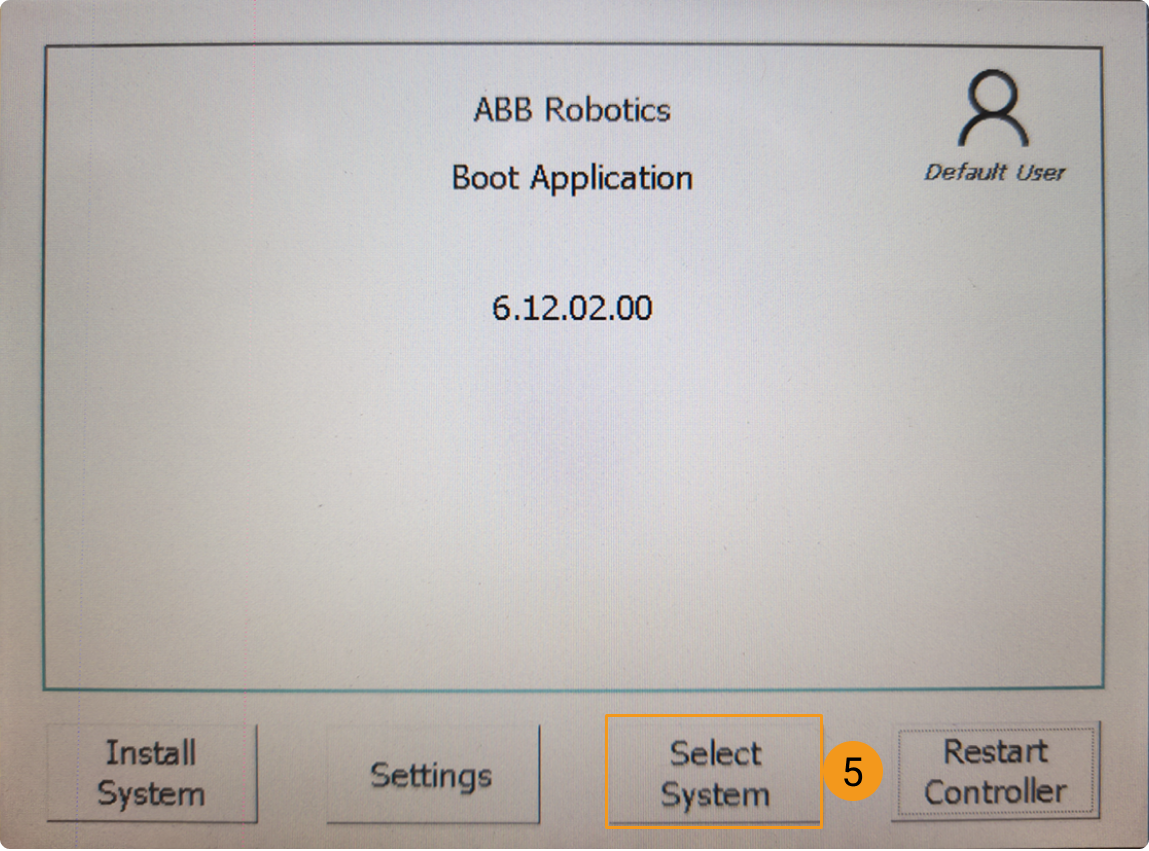
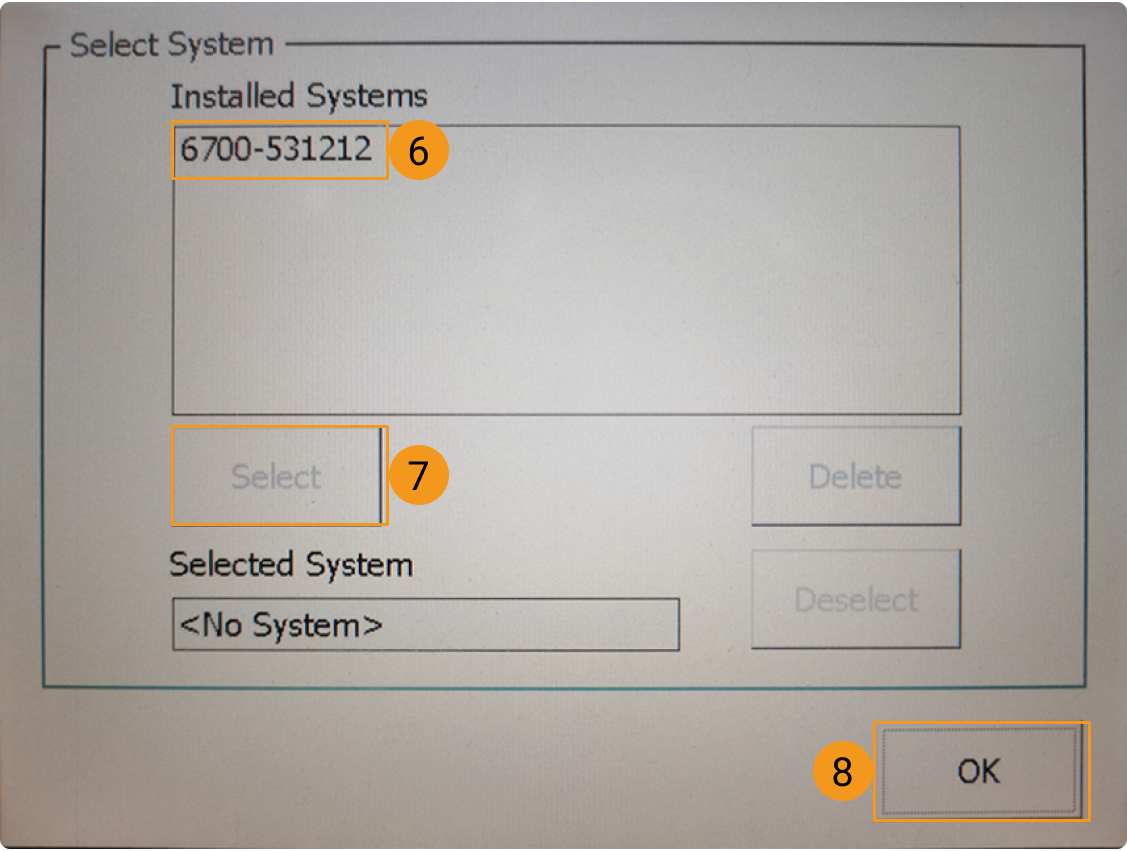
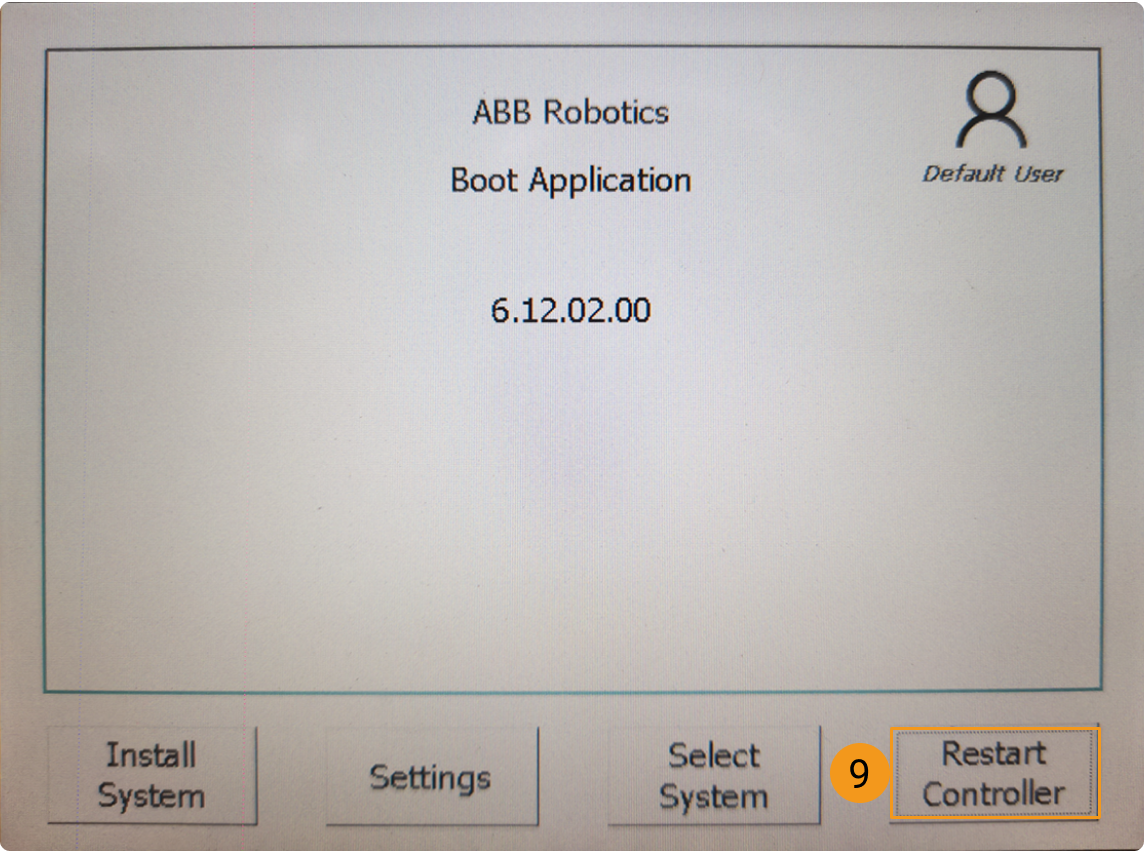
Suivez les étapes illustrées ci‑dessous pour lancer l’application de démarrage.
-
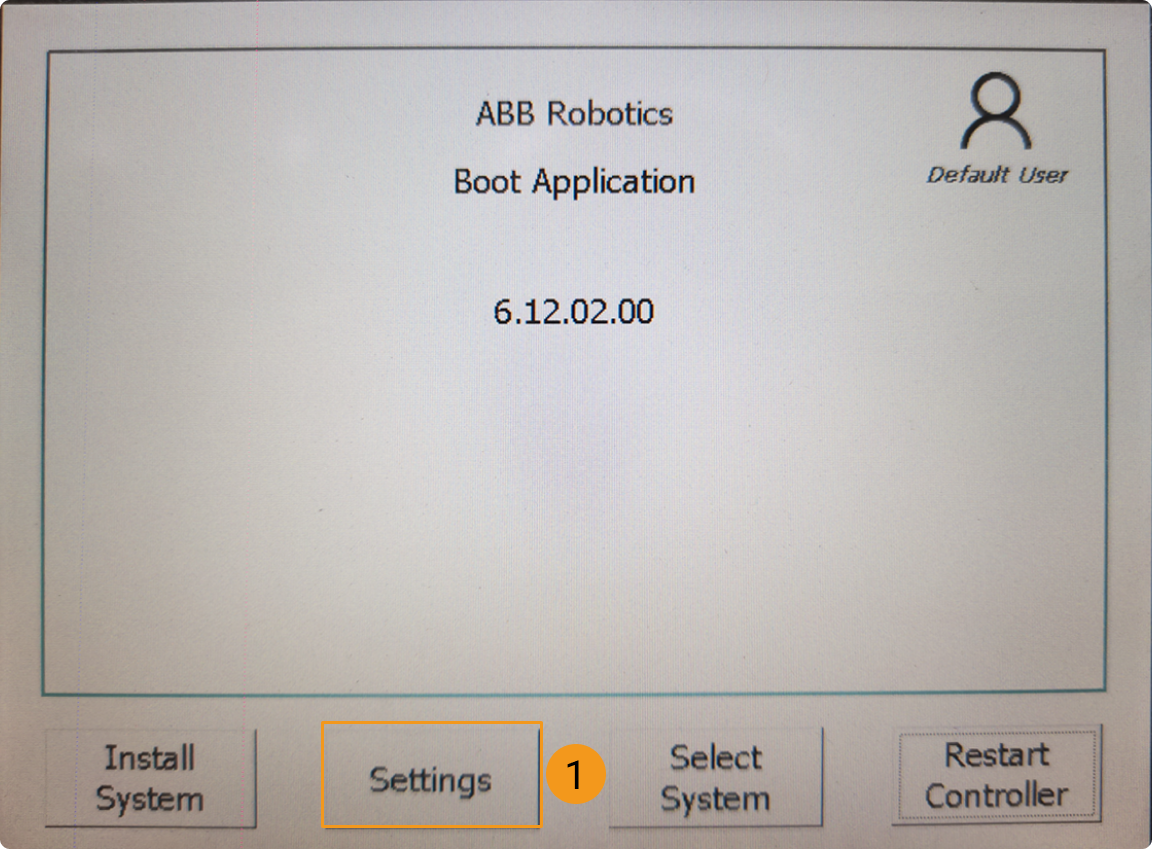
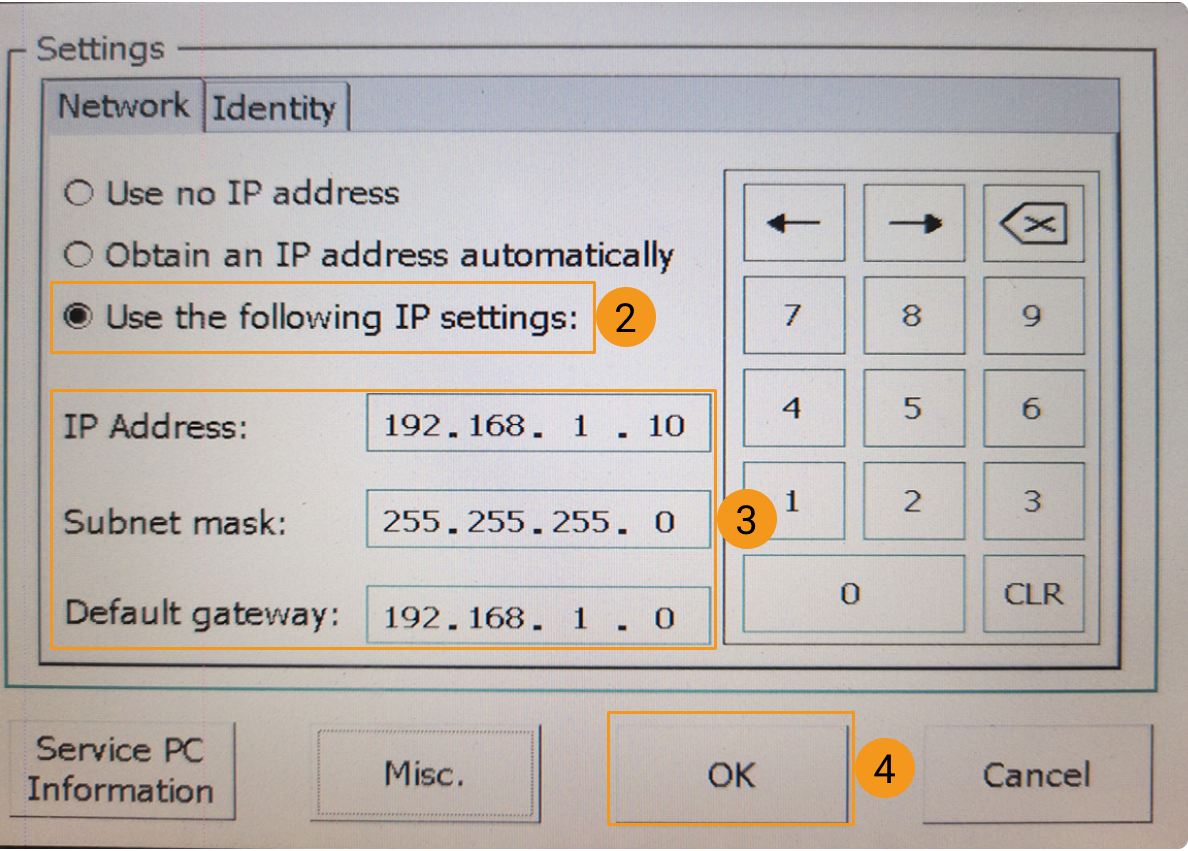
Une fois le redémarrage terminé, l’interface suivante apparaît. Suivez les étapes ci‑dessous pour configurer l’adresse IP. Les adresses IP du robot et de l’IPC doivent se trouver sur le même sous‑réseau.
-
-
Définir l’adresse IP à l’aide de RobotStudio
Cliquez ici pour les instructions
-
Suivez les étapes ci‑dessous pour définir l’adresse IP puis redémarrez le robot.
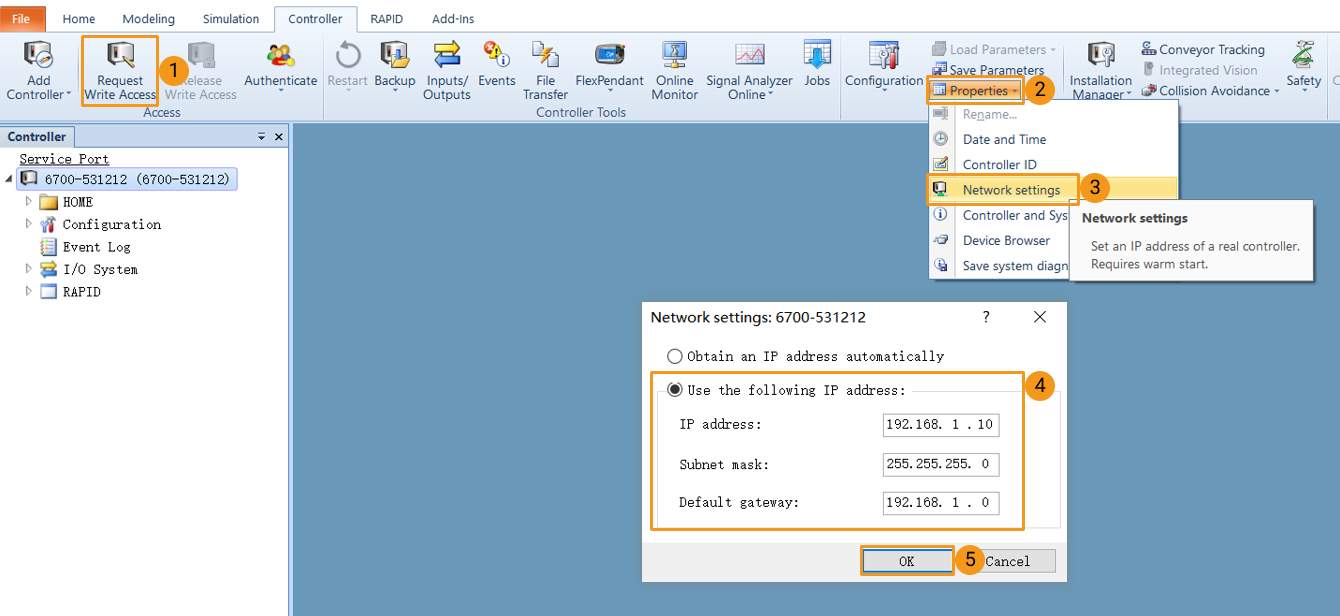
-
Vérifiez que l’adresse IP spécifiée a bien été prise en compte.
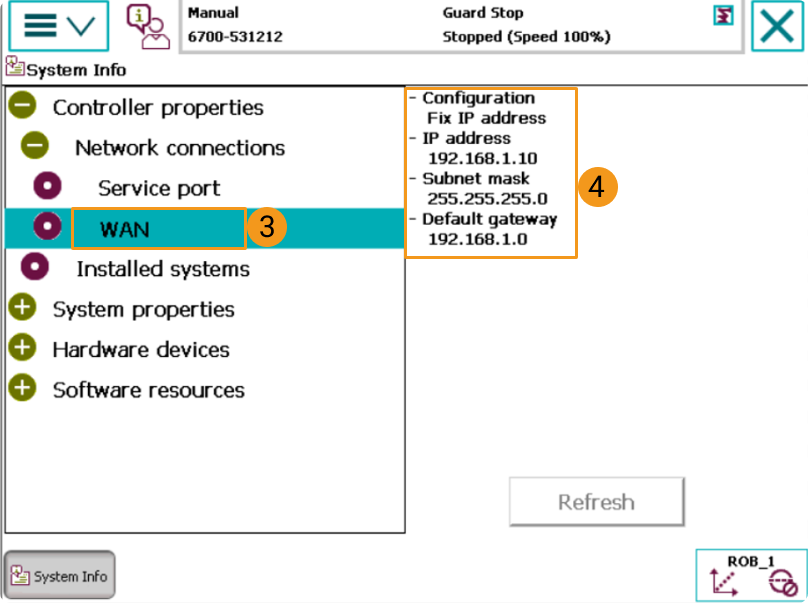
-
-
-
Sur l’IPC, définir l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, leurs adresses IP doivent se trouver sur le même sous‑réseau. Cela signifie que les parties réseau et les masques de sous‑réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 appartiennent au même sous‑réseau.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
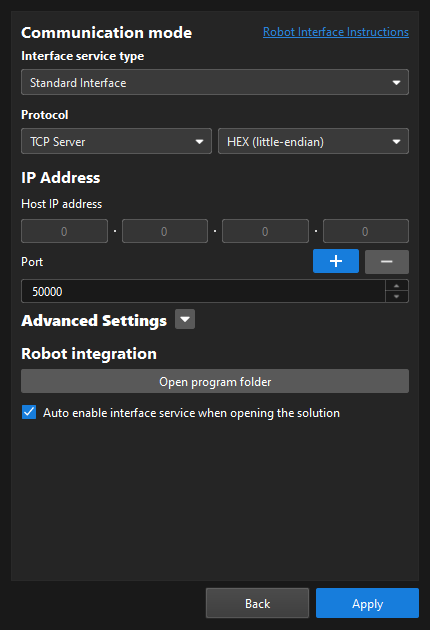
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et HEX (little-endian) pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
-
Si vous souhaitez charger manuellement des fichiers de programme, vous devez effectuer cette étape. Sinon, ignorez cette étape.
-
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme sur le robot (automatique)
Vous pouvez suivre les instructions ci‑dessous pour permettre le chargement automatique des programmes de l’Interface standard ou des programmes d’exemple de l’Interface standard sur le robot. Dans cet exemple, les programmes de l’Interface standard sont chargés automatiquement en suivant les étapes ci‑après. Les étapes pour charger automatiquement les programmes d’exemple de l’Interface standard sont similaires.
| Si le processus de chargement automatique échoue et que vous ne parvenez pas à résoudre le problème, passez à Charger les fichiers du programme sur le robot (manuel). |
-
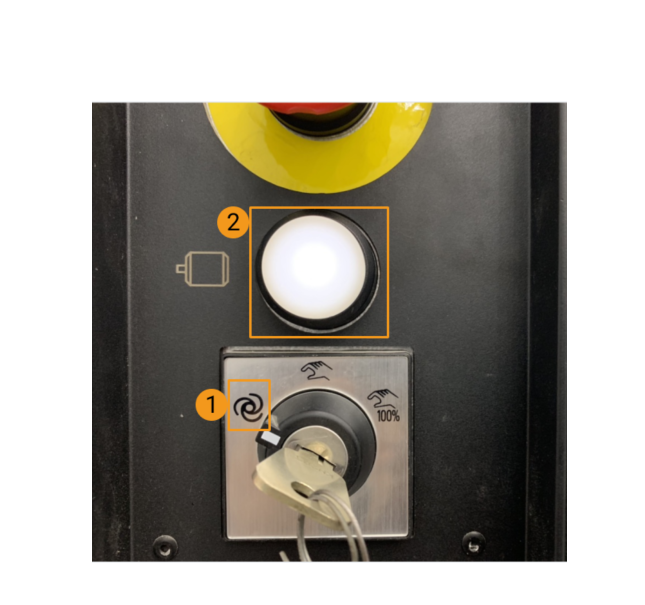
Passez le sélecteur du contrôleur en mode automatique et assurez‑vous que le témoin du moteur est allumé.
-
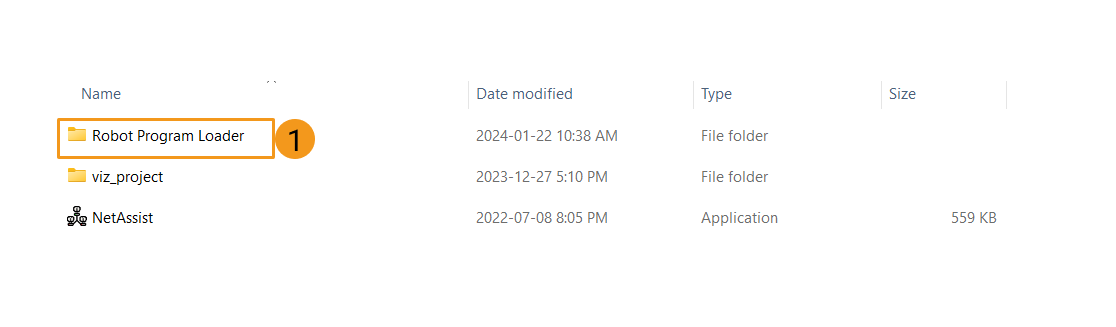
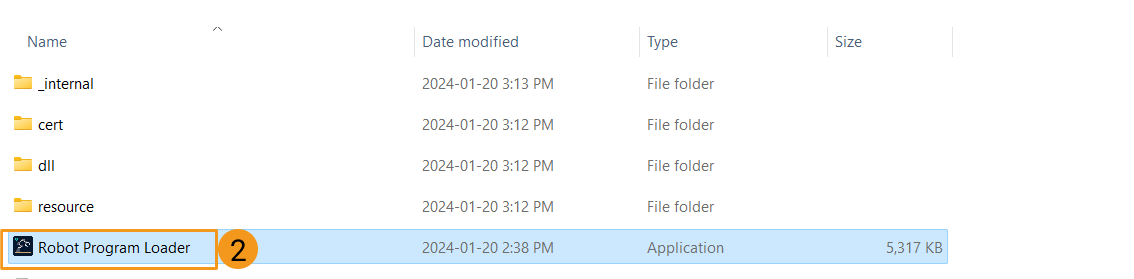
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, ouvrez le dossier Robot Program Loader via le chemin Communication Component\tool\Robot Program Loader, puis double‑cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur s’affiche.
Pour changer la langue dans le chargeur, sélectionnez une autre langue dans la liste déroulante en haut à droite et redémarrez le chargeur pour que la nouvelle langue prenne effet. -
Sélectionnez la marque de robot ABB, saisissez l’adresse IP réelle du robot, puis cliquez sur Connecter.
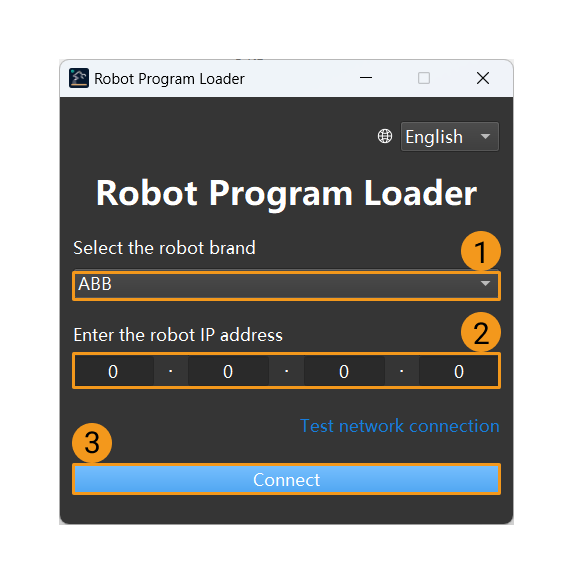
Si la connexion échoue, cliquez sur Tester la connexion réseau dans l’angle inférieur droit pour diagnostiquer le problème. -
Dans l’interface Chargement de programme ABB, sélectionnez un dossier pour stocker les fichiers de sauvegarde puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi est affiché dans la section Journal.
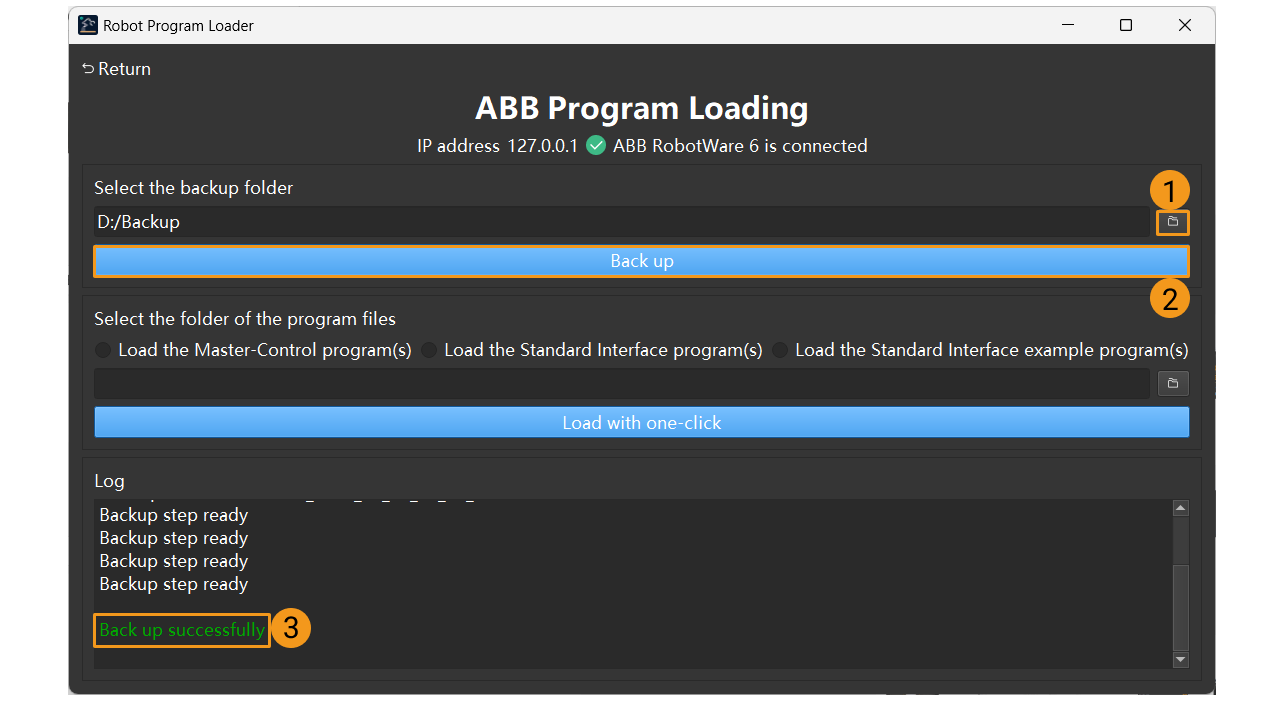
Si des erreurs se produisent lors du processus de chargement ultérieur, ces fichiers pourront être utilisés pour réinitialiser le système du robot. -
Après la réussite de la sauvegarde, sélectionnez Charger le programme de l’Interface standard pour confirmer le dossier contenant les fichiers du programme et cliquez sur Charger en un clic. Si les fichiers sont chargés sur le robot, un message indiquant que les fichiers du programme ont été chargés avec succès apparaît dans la section Journal.
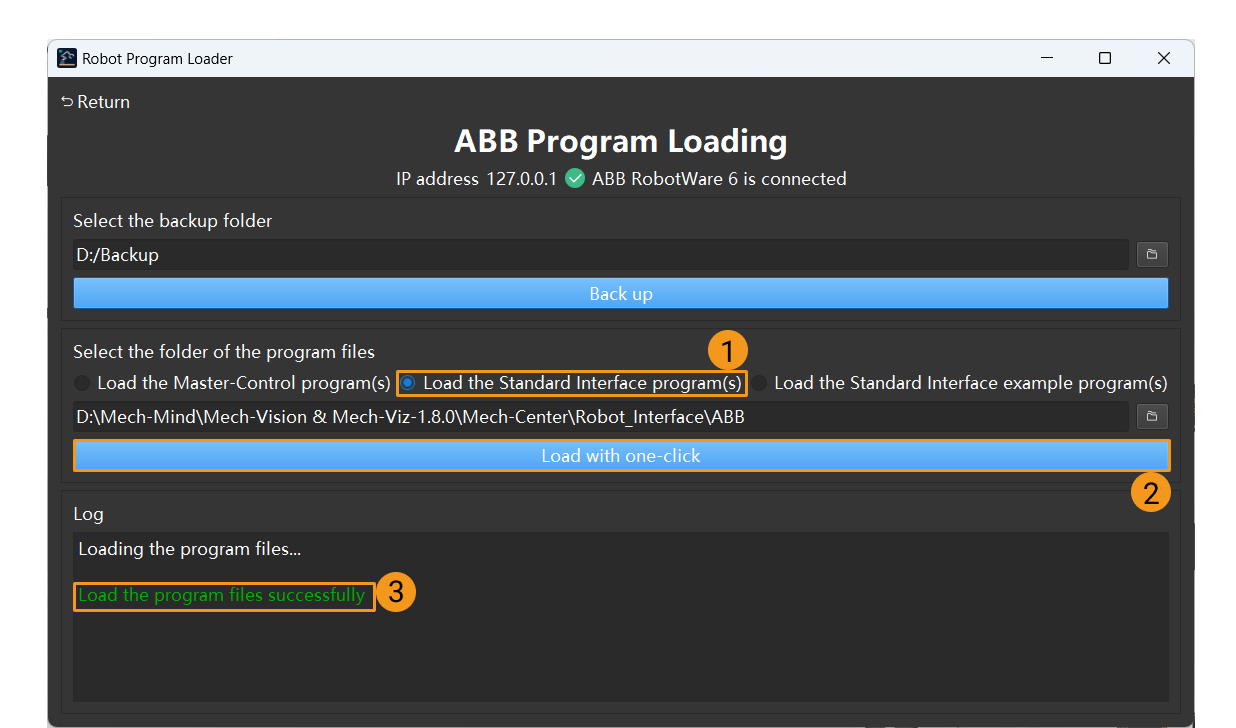
| Si vous souhaitez charger des programmes d’exemple de l’Interface standard, sélectionnez Charger les programmes d’exemple de l’Interface standard puis cliquez sur Charger en un clic. |
Après la réussite du processus de chargement automatique, passez à Tester la communication de l’Interface standard.
Charger les fichiers du programme sur le robot (manuel)
Si le processus Charger les fichiers du programme sur le robot (automatique) est réussi, passez cette section.
Avant de charger manuellement des fichiers sur le robot, nous vous recommandons d’effectuer une sauvegarde. Ainsi, vous pourrez rétablir le système du robot en cas d’opération incorrecte.
Préparer les fichiers du programme
-
Branchez la clé USB sur le port USB de l’IPC.
-
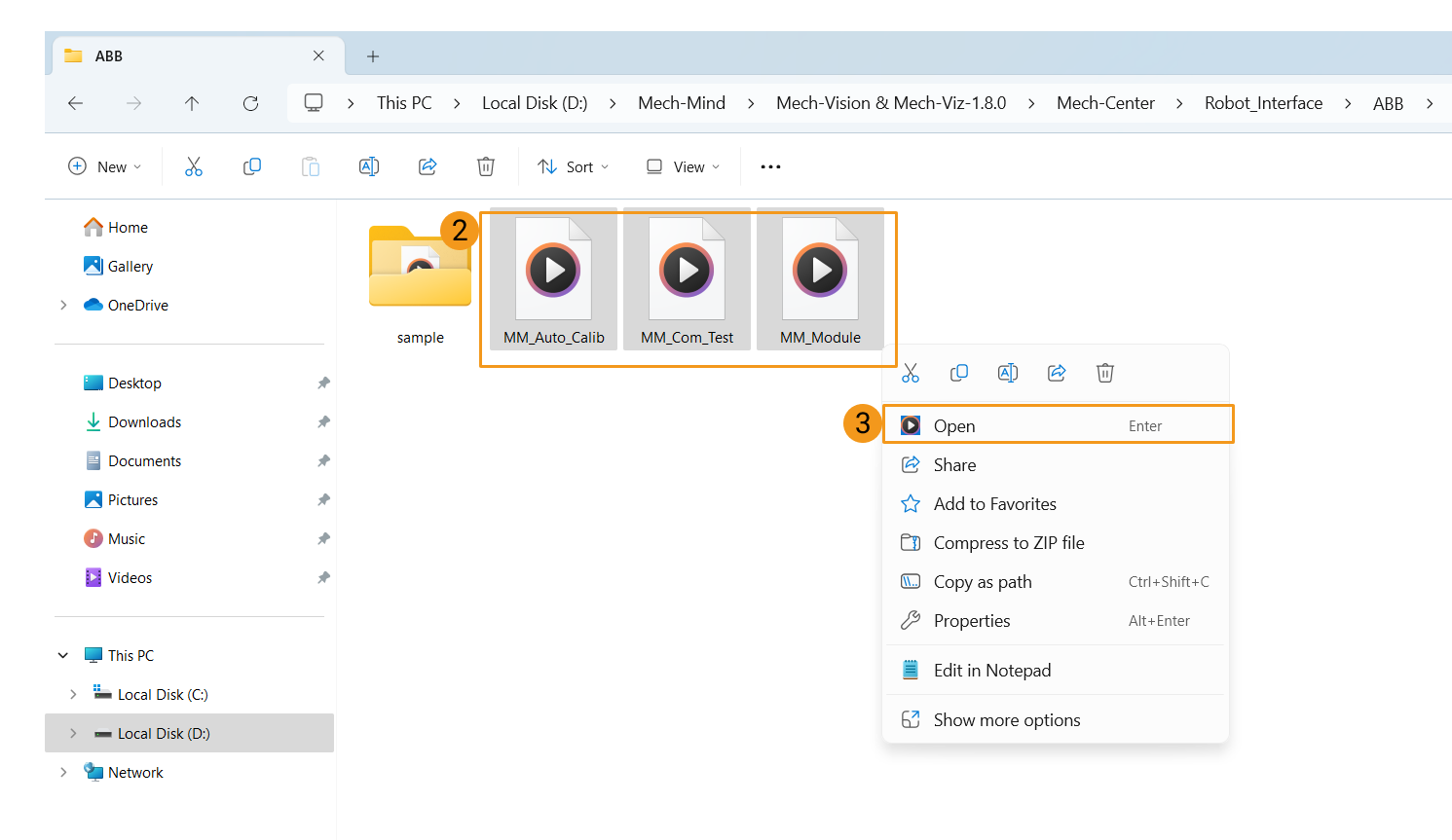
Sur l’IPC, ouvrez le dossier
RobotWare 6dans le dossier de programme (le dossierABB), copiez les trois fichiers suivants sur la clé USB, puis débranchez la clé USB.-
Vous pouvez également trouver le dossier de programme dans le chemin
Communication Component/Robot_Interface/ABBdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Si un fichier de programme portant le même nom existe déjà, veuillez le supprimer ou le renommer avant de charger le nouveau.
-
MM_Module.mod (fichier de module de programme)
-
MM_Auto_Calib.mod (fichier de module de programme d’étalonnage)
-
MM_Com_Test.mod (fichier de module de programme de test de communication)
-
Charger les fichiers sur le robot
Vous pouvez charger les fichiers du programme à l’aide du boîtier d’enseignement ou de RobotStudio. Avant de commencer, assurez‑vous que le robot est en mode manuel.

-
Charger les fichiers du programme à l’aide du boîtier d’enseignement
Cliquez ici pour les instructions
-
Branchez la clé USB sur le port USB à l’arrière du boîtier d’enseignement.
-
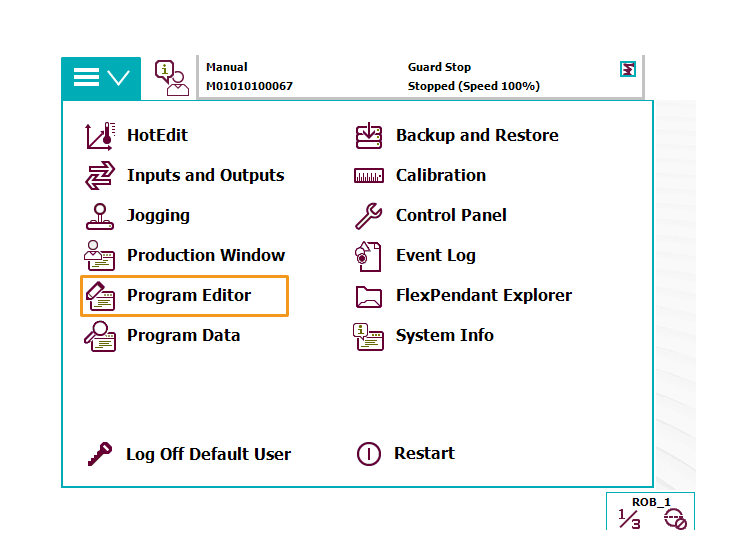
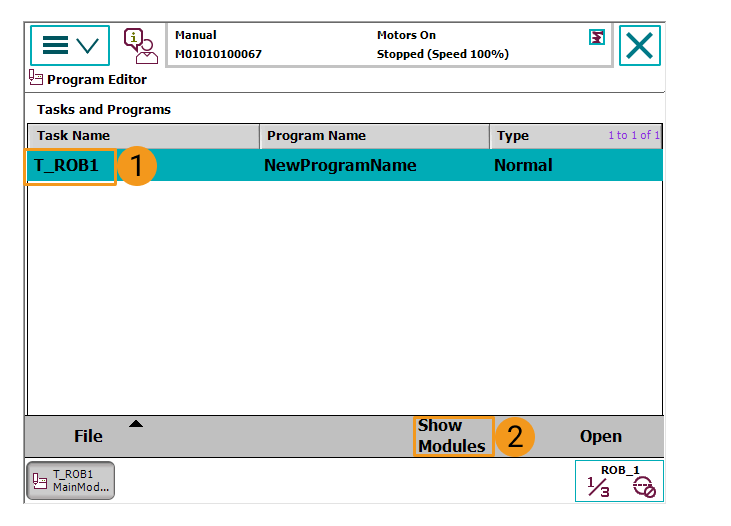
Appuyez sur Éditeur de programmes.
-
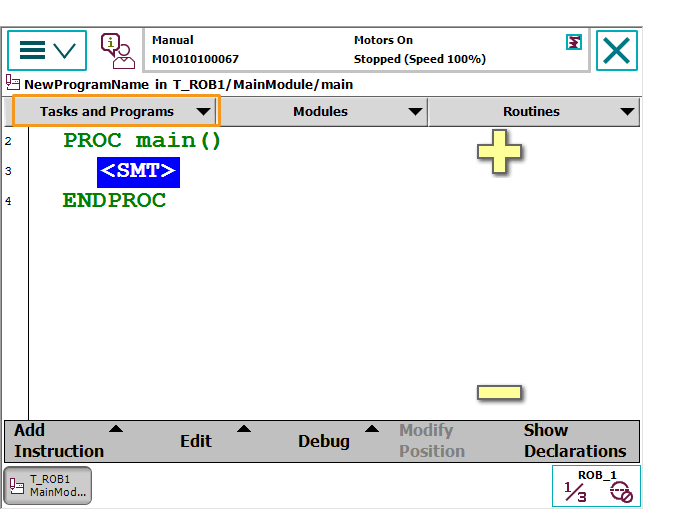
Appuyez sur Tâches et programmes.
-
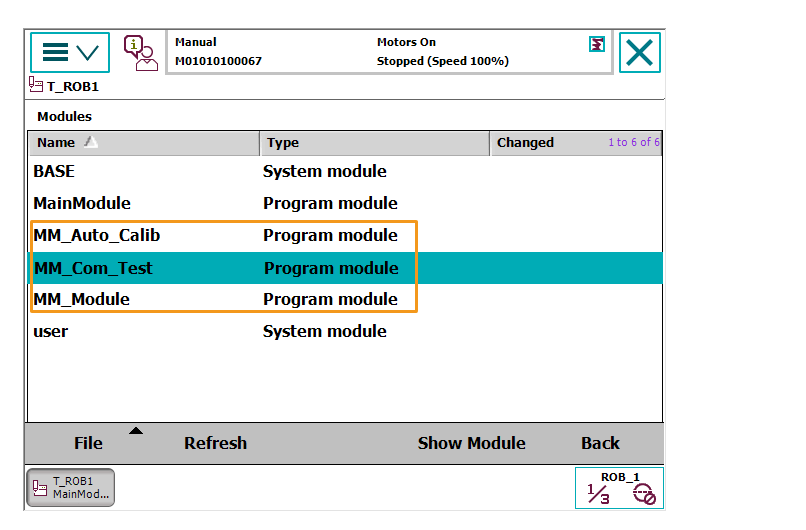
Sélectionnez T_ROB1 et appuyez sur Afficher les modules.
-
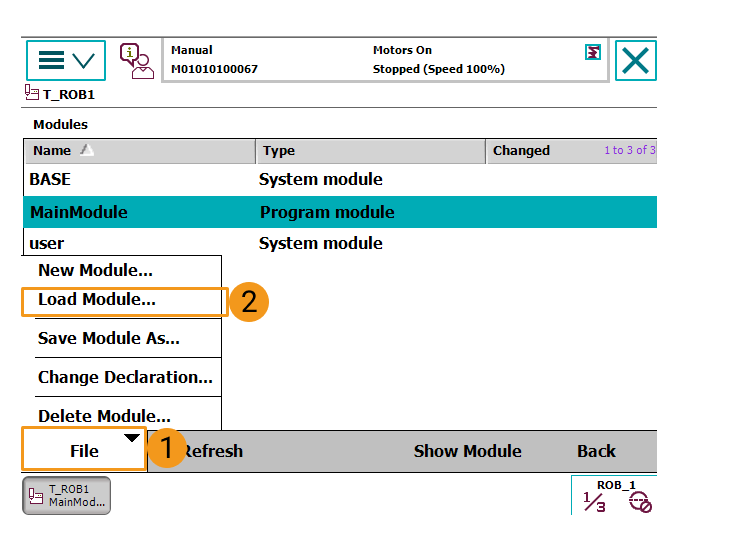
Sélectionnez .
-
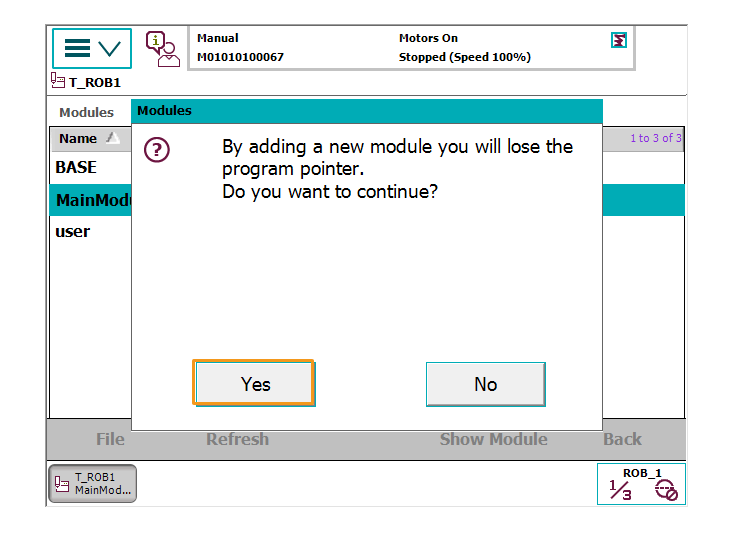
Sélectionnez Oui dans la fenêtre contextuelle.
-
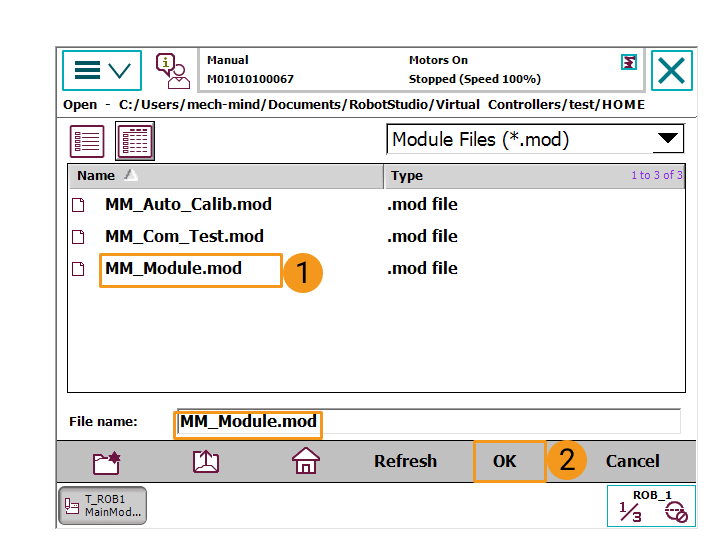
Recherchez les fichiers du programme sur la clé USB et sélectionnez MM_Module.mod pour afficher MM_Module.mod comme nom de fichier dans la partie inférieure. Ensuite, appuyez sur Oui.
-
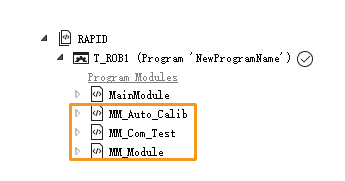
Répétez les instructions ci‑dessus pour charger MM_Auto_Calib.mod et MM_Com_Test.mod. Ensuite, vérifiez que les trois fichiers sont chargés sous T_ROB1.
-
-
Charger les fichiers du programme à l’aide de RobotStudio
Cliquez ici pour les instructions
-
Ouvrez RobotStudio et connectez‑vous au contrôleur.
-
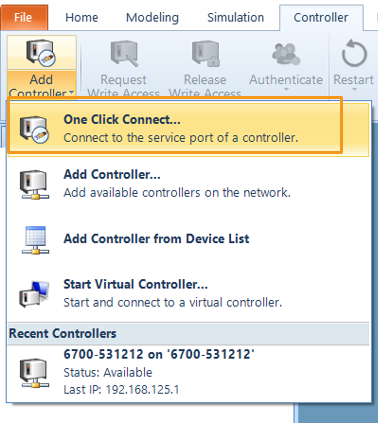
Si le contrôleur du robot est connecté via le port LAN, cliquez sur Connexion en un clic….
-
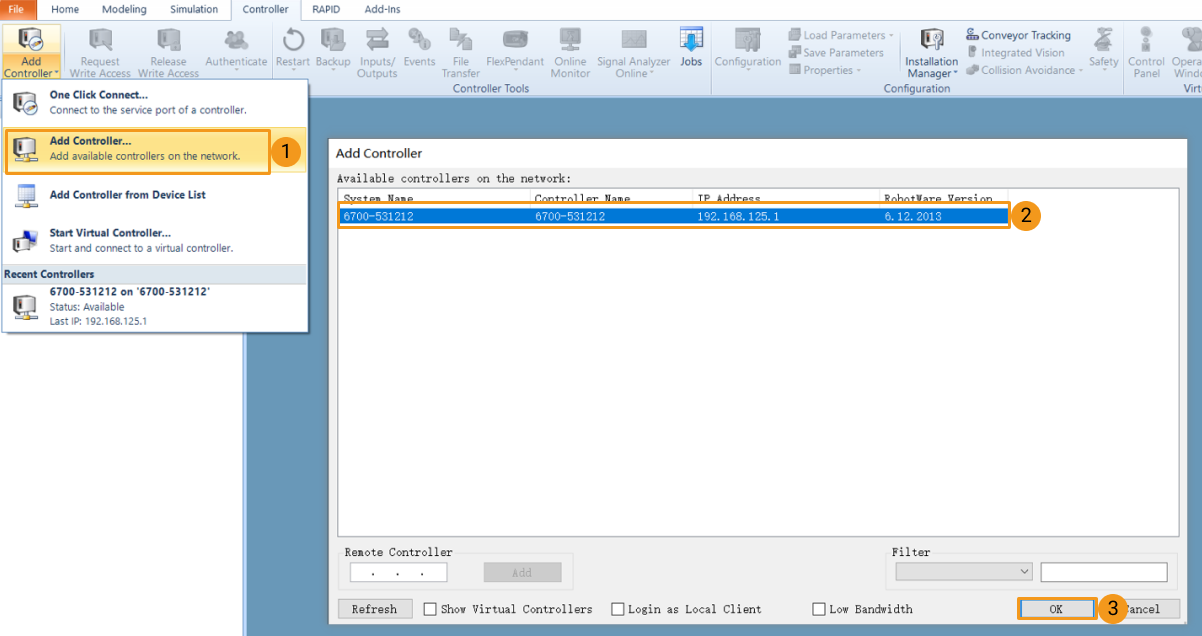
Si le contrôleur du robot est connecté via le port X6 (WAN) ou un commutateur, cliquez sur Ajouter un contrôleur, puis sélectionnez le contrôleur et cliquez sur OK. Si le contrôleur est ajouté, RobotStudio se connectera automatiquement au port de service du contrôleur.
-
-
Demander l’accès en écriture. Cliquez sur Demander l’accès en écriture pour demander l’accès en écriture au boîtier d’enseignement.
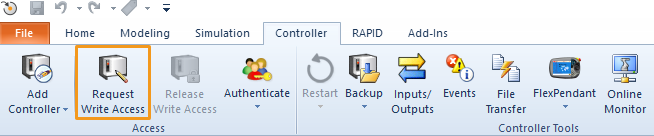
Appuyez sur Accorder dans la fenêtre Demande d’accès en écriture sur le boîtier d’enseignement.
-
Comme illustré ci‑dessous, trouvez et cliquez avec le bouton droit sur T_ROB1, puis sélectionnez Charger le module dans le menu.
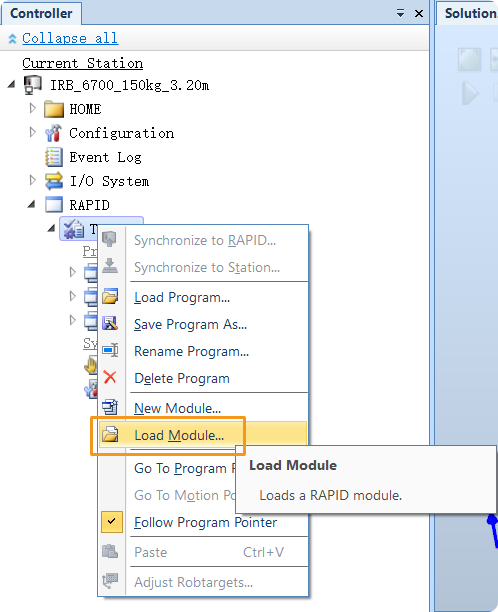
-
Sélectionnez les fichiers du module de programme et cliquez sur Ouvrir.
-
Confirmez que les trois fichiers de programme apparaissent sous T_ROB1.
-
Tester la communication de l’Interface standard
Sélectionner et modifier le programme utilisé pour le test de communication
-
Placez le sélecteur du contrôleur en mode manuel.
-
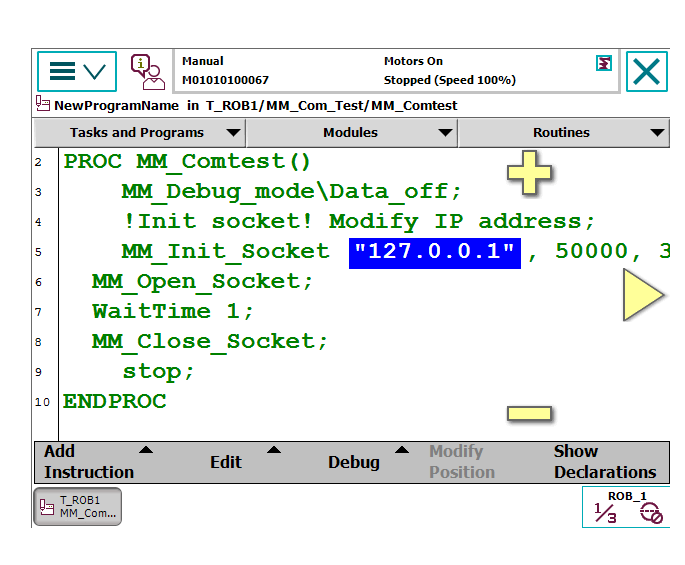
Sur le boîtier d’enseignement, appuyez sur le menu dans le coin supérieur gauche, sélectionnez , sélectionnez MM_Com_Test, puis sélectionnez Afficher le module.
Si vous ne trouvez pas MM_Com_Test après avoir sélectionné T_ROB1 et que le code du programme s’affiche, sélectionnez Tâches et programmes dans la partie supérieure. Dans l’interface Tâches et programmes, confirmez que T_ROB1 est sélectionné puis sélectionnez Afficher les modules pour faire apparaître MM_Com_Test. 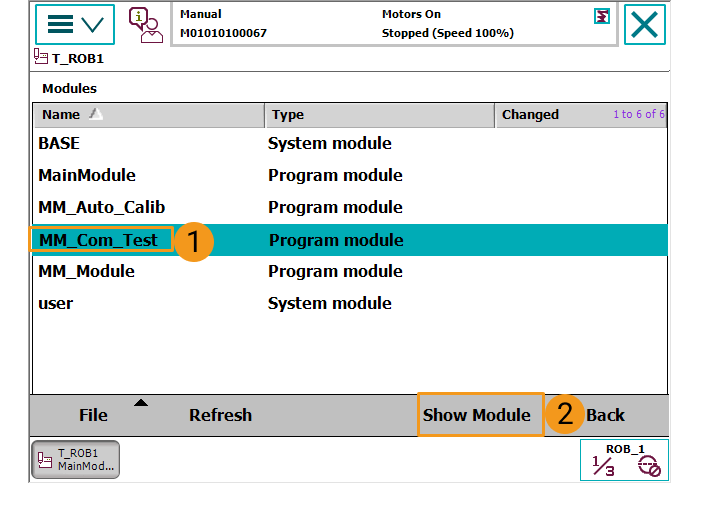
-
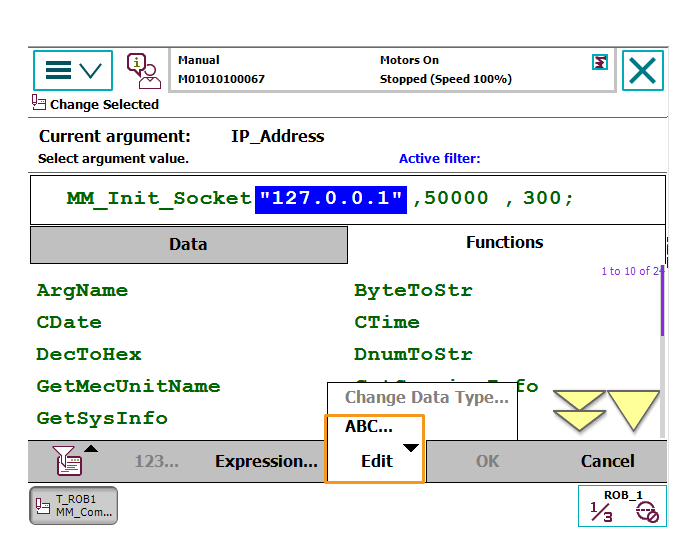
Touchez deux fois l’adresse IP, sélectionnez , modifiez l’adresse IP avec celle de l’IPC, puis sélectionnez OK. Si le numéro de port hôte défini dans Mech-Vision a été modifié, le numéro de port 50000 ici doit être remplacé par le port hôte indiqué dans Mech-Vision.
Exécuter le programme et tester la connexion
-
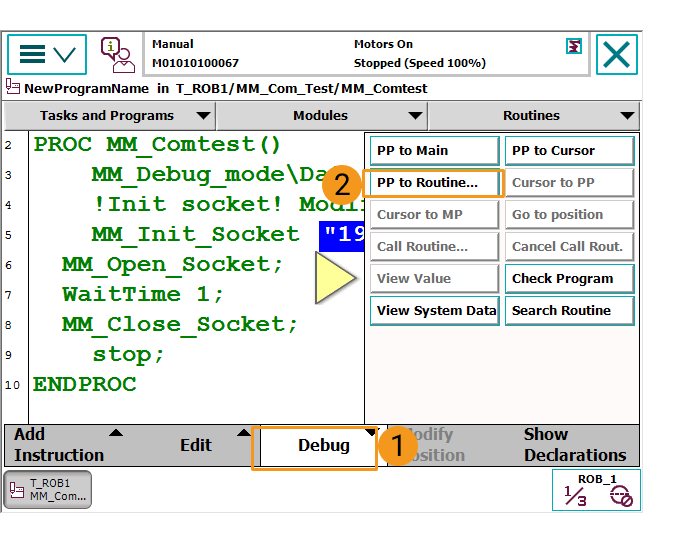
Dans l’interface suivante, sélectionnez .
-
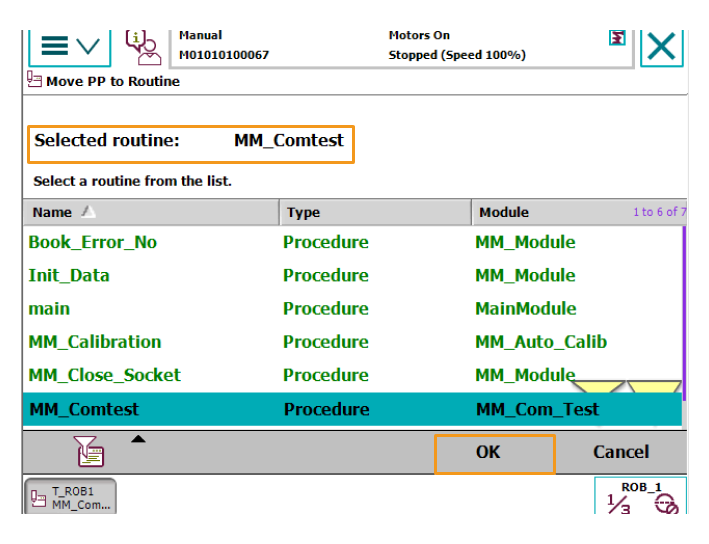
Confirmez que MM_Comtest est sélectionné et cliquez sur OK.
-
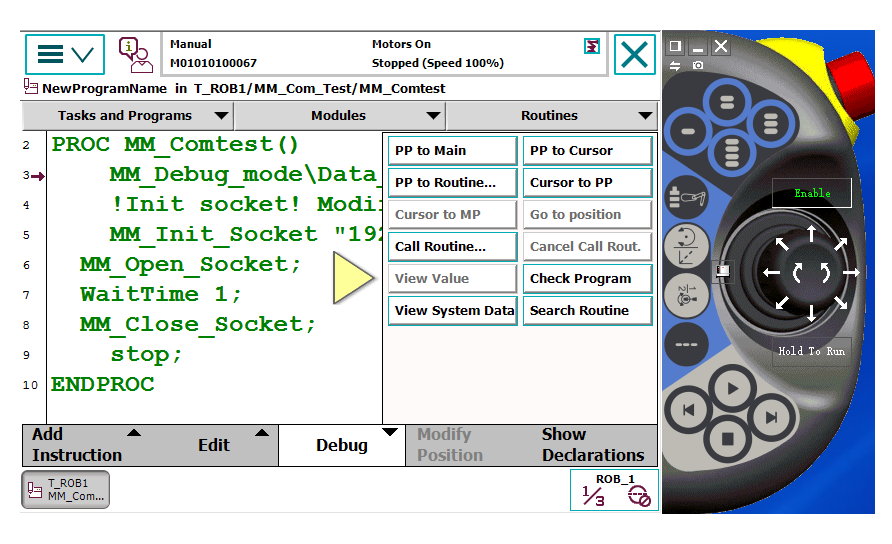
Maintenez enfoncé le bouton d’activation sur le côté droit du boîtier d’enseignement (en veillant à ne pas le relâcher pendant l’exécution du programme). Ensuite, appuyez de manière répétée sur le bouton suivant pour avancer manuellement dans le programme jusqu’à ce que le pointeur du programme atteigne la ligne 9.
-
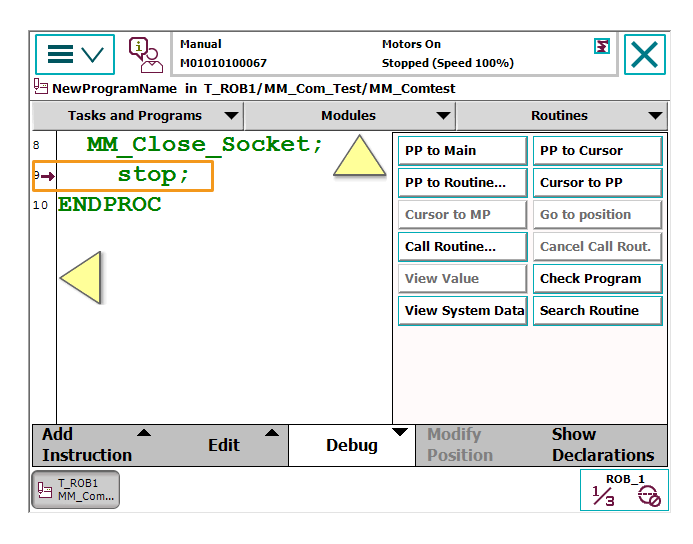
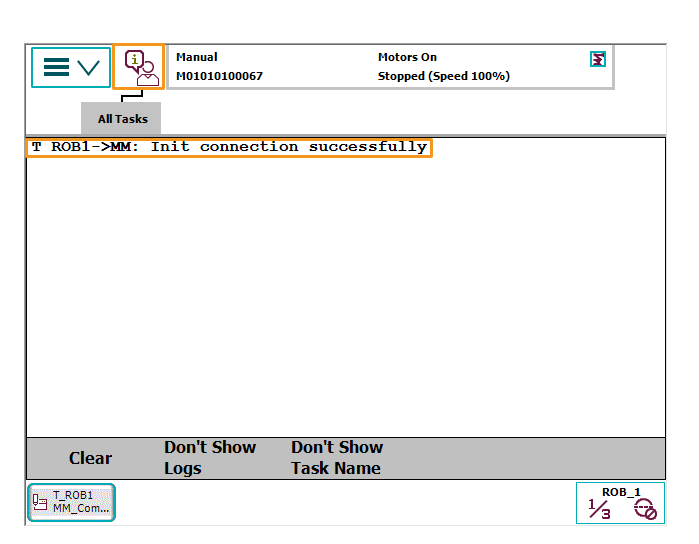
Appuyez sur le bouton suivant pour afficher le message suivant.
-
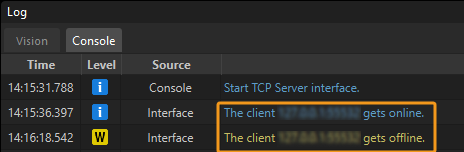
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.
Annexe
Sauvegarde
Avant d’utiliser le robot, suivez les instructions de sauvegarde ci‑dessous afin de sauvegarder le système pour pouvoir restaurer le système du robot en cas d’opération incorrecte. Vous pouvez sauvegarder les fichiers à l’aide du boîtier d’enseignement ou de RobotStudio.
-
Sauvegarder les fichiers à l’aide du boîtier d’enseignement
Cliquez ici pour les instructions
-
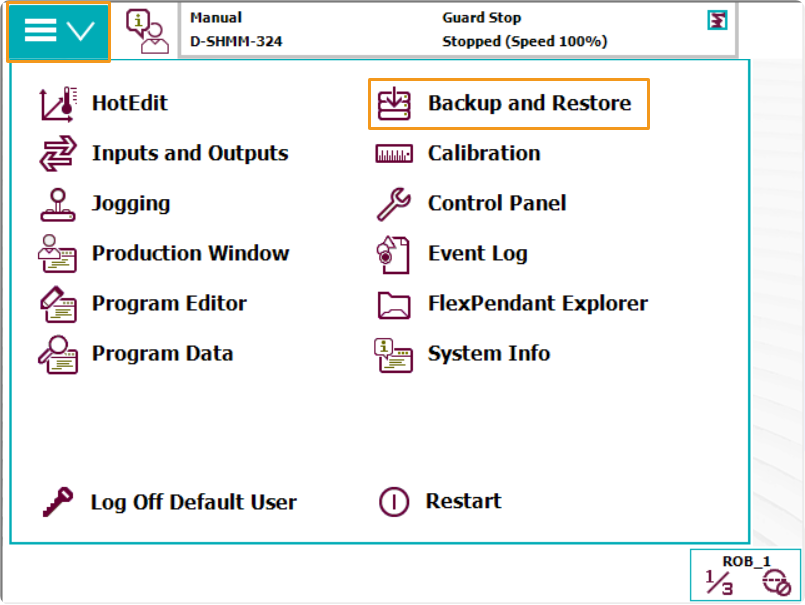
Accédez à l’interface d’accueil en appuyant sur le menu dans le coin supérieur gauche, puis sélectionnez Sauvegarder et restaurer.
-
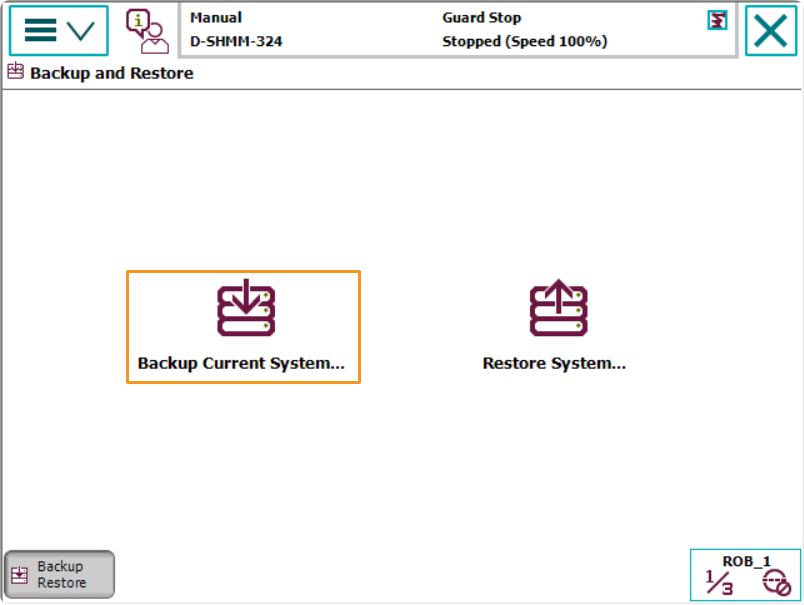
Sélectionnez Sauvegarder le système actuel….
-
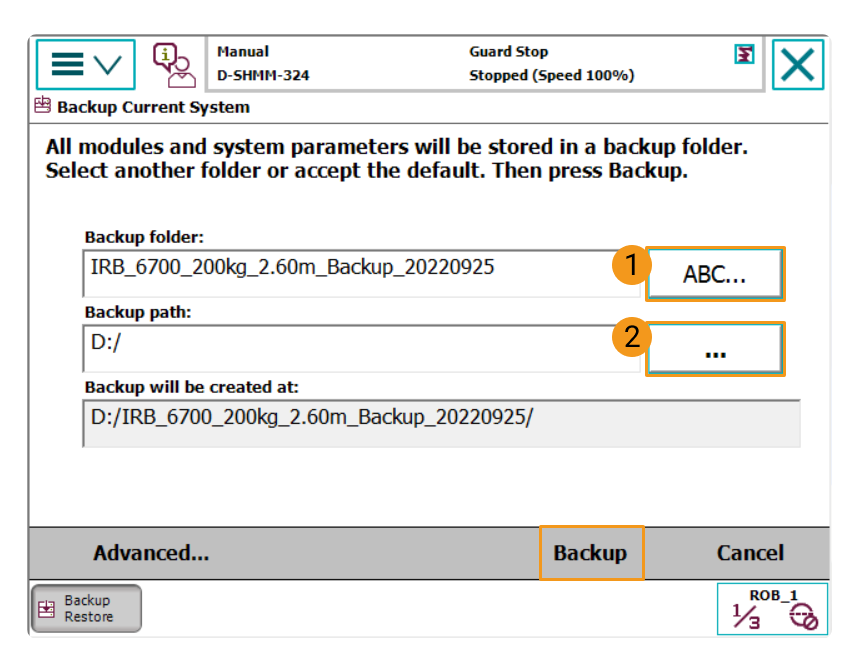
Indiquez le nom du fichier de sauvegarde en appuyant sur 1, et indiquez le répertoire de sauvegarde du fichier en appuyant sur 2. Ensuite, appuyez sur Sauvegarder dans l’angle inférieur droit pour démarrer le processus de sauvegarde.
-
-
Sauvegarder les fichiers à l’aide de RobotStudio
Cliquez ici pour les instructions
-
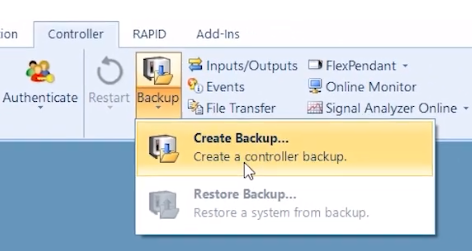
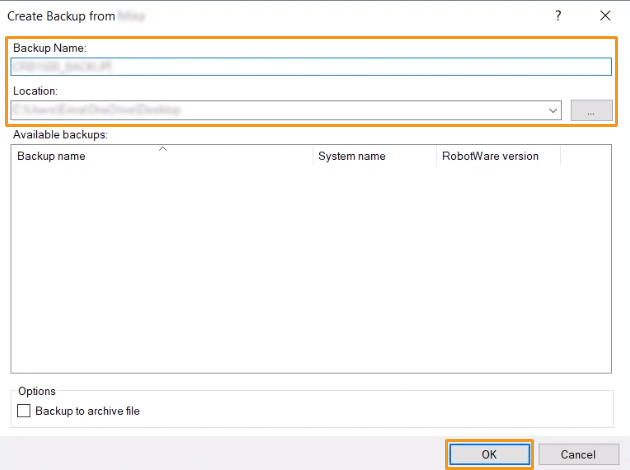
Dans l’interface d’accueil de RobotStudio, sélectionnez le contrôleur que vous souhaitez sauvegarder, puis sélectionnez .
-
Dans la fenêtre contextuelle, confirmez le nom et l’emplacement de la sauvegarde puis cliquez sur OK.
-
Réinitialisation
Il existe deux types de réinitialisation : réinitialisation du système et réinitialisation de RAPID.
-
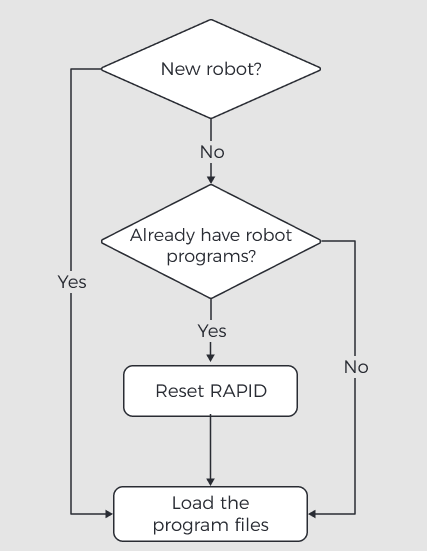
La réinitialisation de RAPID supprime le programme et les données RAPID actuels tout en conservant les paramètres du système.
Cliquez ici pour les instructions
-
Déterminez si vous devez réinitialiser RAPID en vous basant sur l’organigramme ci‑dessous.
-
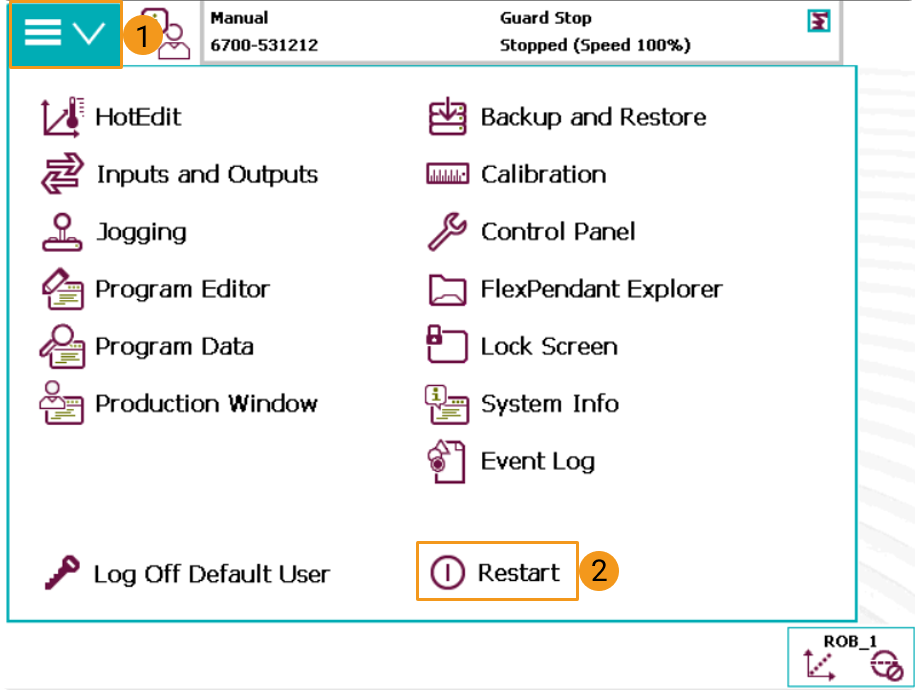
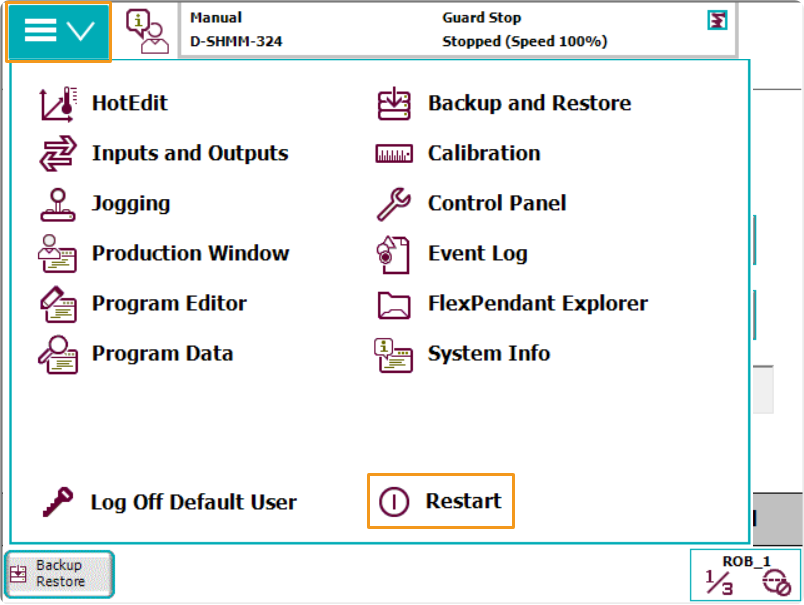
Accédez à l’interface d’accueil en appuyant sur le menu dans le coin supérieur gauche, puis sélectionnez Redémarrer.
-
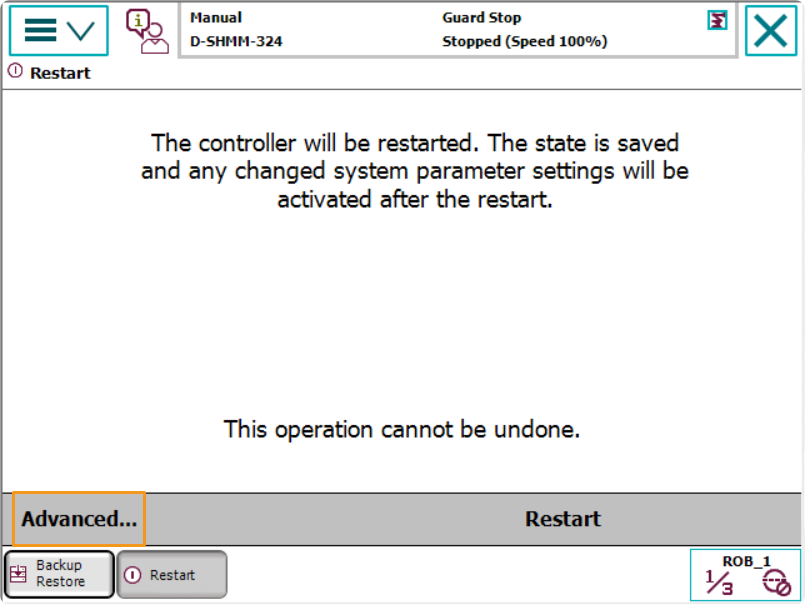
Appuyez sur Avancé….
-
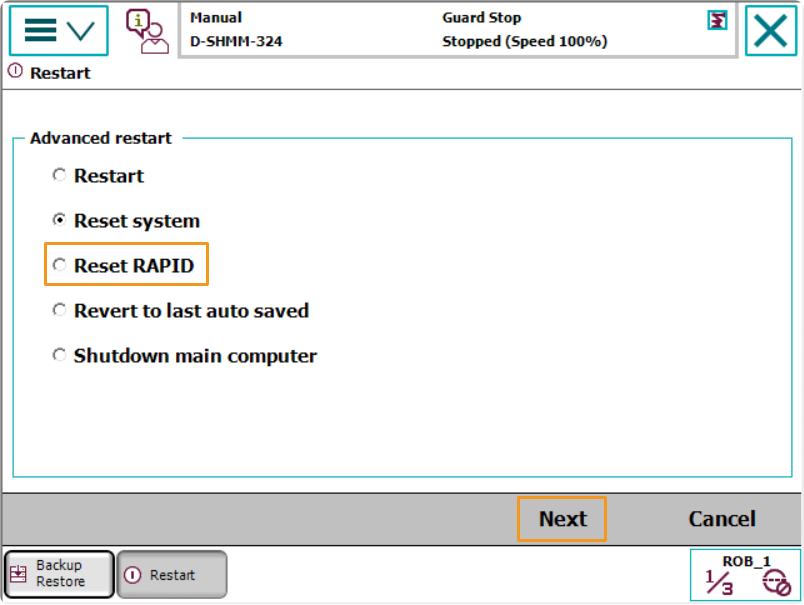
Sélectionnez Réinitialiser RAPID, puis appuyez sur Suivant.
-
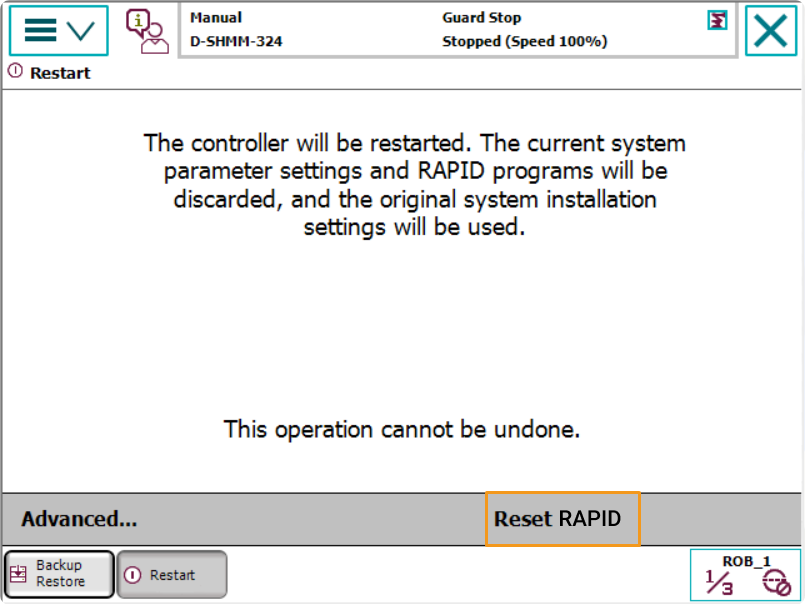
Appuyez sur Réinitialiser RAPID.
-
-
La réinitialisation du système restaure les paramètres système par défaut et le programme RAPID, et réinitialise les paramètres d’E/S. Si une carte de communication ou d’autres dispositifs de communication sont utilisés, vous devez les reconfigurer après la réinitialisation du système.
Cliquez ici pour les instructions
-
La réinitialisation du système restaure les réglages d’usine. Assurez‑vous d’avoir effectué la sauvegarde.
-
Accédez à l’interface d’accueil en appuyant sur le menu dans le coin supérieur gauche, puis sélectionnez Redémarrer.
-
Appuyez sur Avancé….
-
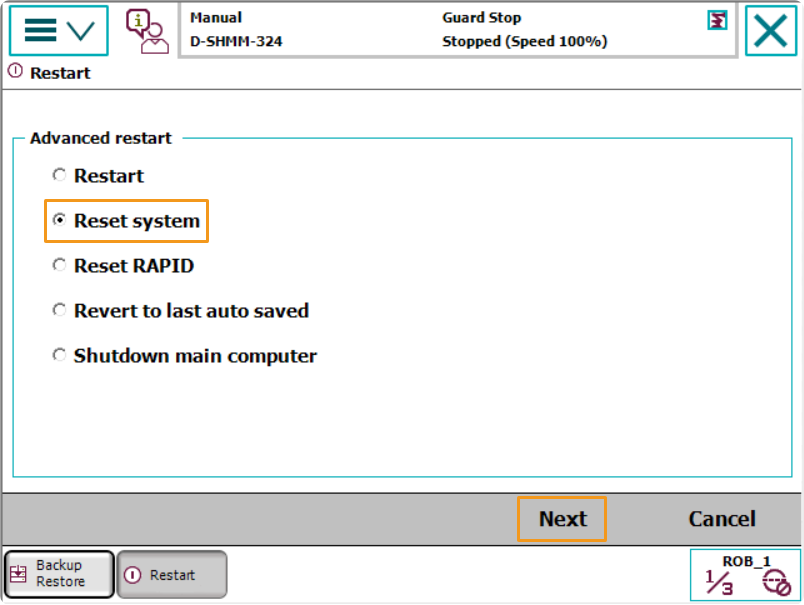
Sélectionnez Réinitialiser le système puis appuyez sur Suivant.
-
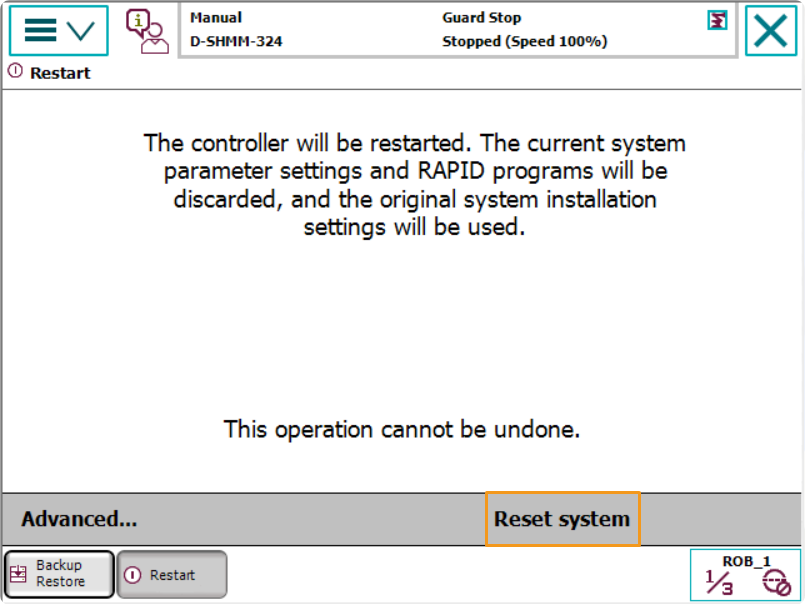
Appuyez sur Réinitialiser le système.
-