Configurer la communication via l’interface standard avec la série DOBOT CRA
Ce guide explique comment configurer la communication via l’interface standard avec un robot de la série DOBOT CRA.
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Nom et version du logiciel de contrôle : DobotStudio Pro v4.4.0
Vous pouvez visiter le centre de téléchargement officiel de DOBOT, trouver la version requise de DobotStudio Pro dans la section Logiciel de contrôle, cliquer sur l’icône  pour télécharger le paquet logiciel, puis installer le logiciel.
pour télécharger le paquet logiciel, puis installer le logiciel.
-
Modèle de contrôleur : CC-262
-
Version du contrôleur : 4.4.0.0-stable
Vérifier la version du contrôleur
-
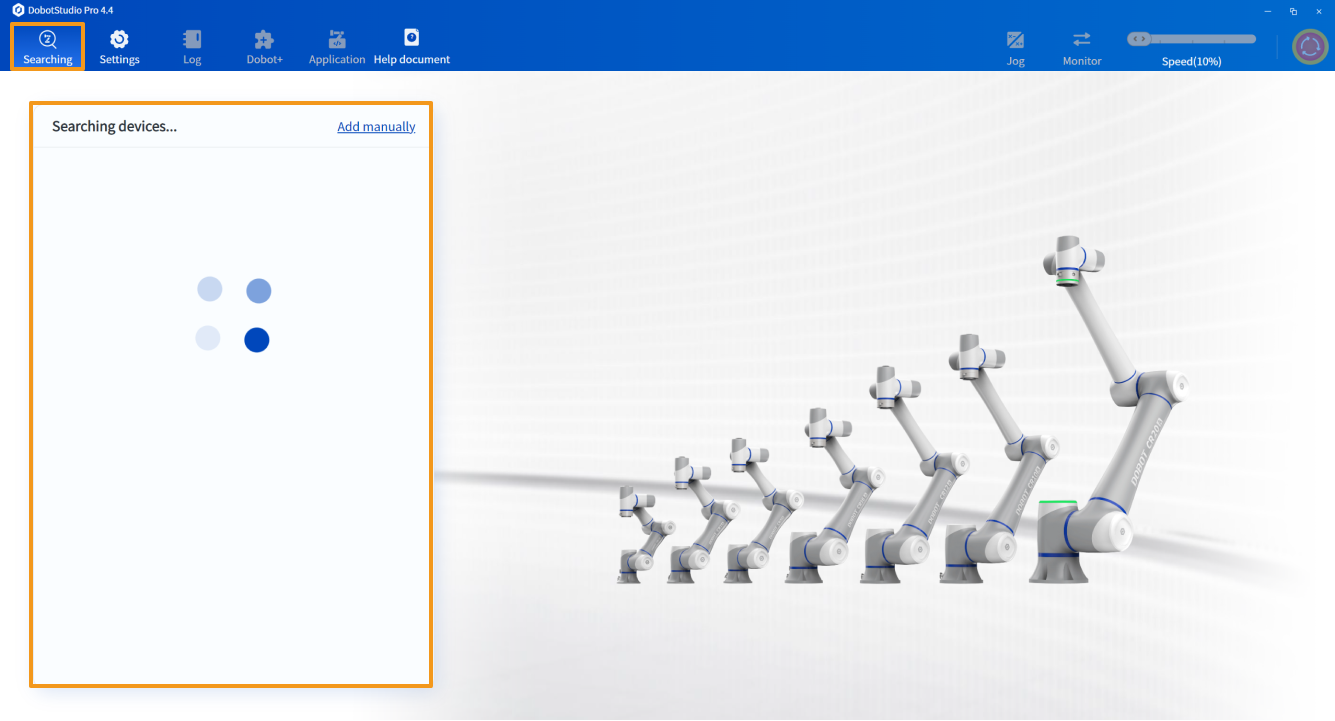
Ouvrez le logiciel DobotStudio Pro installé et connectez le robot comme indiqué dans la zone sélectionnée du logiciel, comme illustré ci-dessous.
-
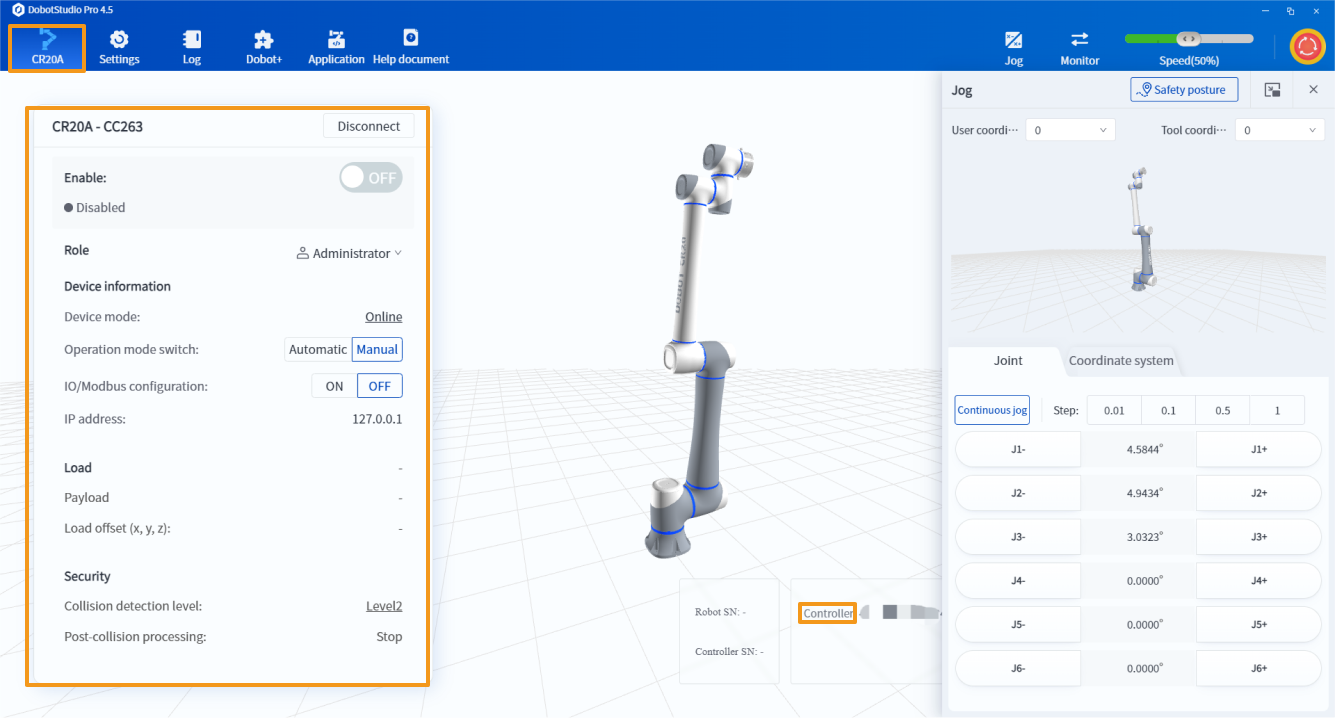
Une fois la communication établie, l’interface suivante apparaît. Dans le coin inférieur droit de l’interface, vérifiez la version du contrôleur.
Configurer la connexion réseau
Connecter le matériel
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre sur le port réseau du contrôleur du robot.
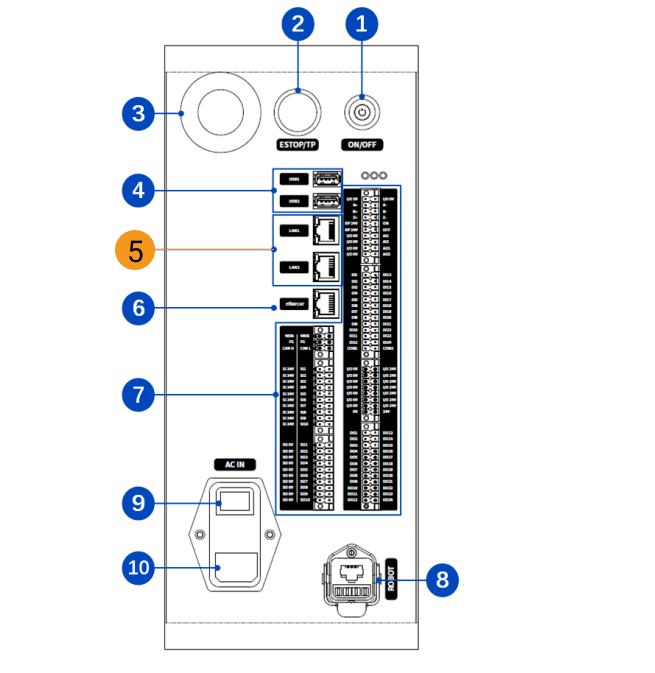
⑤ est le port réseau du contrôleur du robot.
Définir l’adresse IP
-
Dans la barre d’outils supérieure du logiciel DobotStudio Pro, cliquez sur Paramètres.
-
Dans le volet de navigation gauche de la boîte de dialogue Paramètres, sélectionnez Communication. Dans l’onglet Communication, définissez l’adresse IP du robot dans la section Communication. Pour permettre la communication entre l’IPC et le contrôleur du robot, l’adresse IP du robot et l’adresse IP de l’IPC doivent appartenir au même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.2/255.255.255.0 et 192.168.100.3/255.255.255.0 sont dans le même sous-réseau.
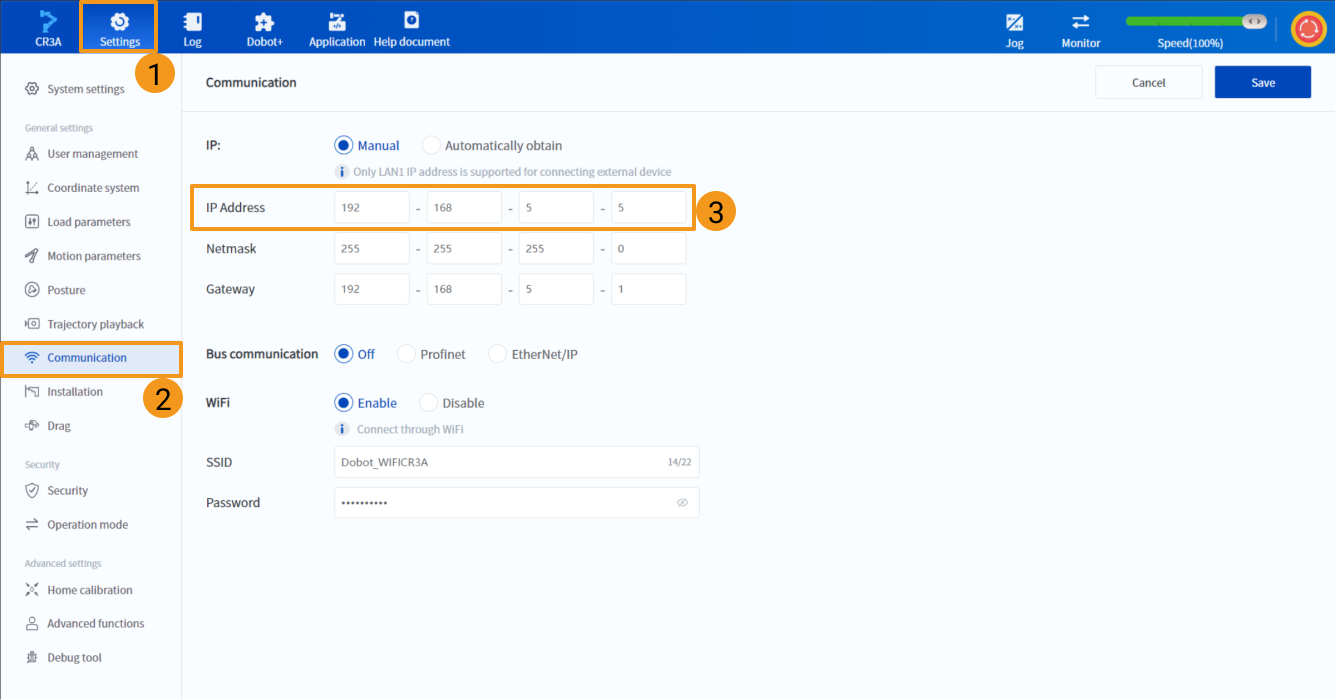
| Avant d’effectuer cette étape, veuillez vous assurer que le robot est connecté dans DobotStudio Pro. Pour savoir comment connecter le robot dans DobotStudio Pro, voir l’étape 1 de la section Vérifier la version du contrôleur. |
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
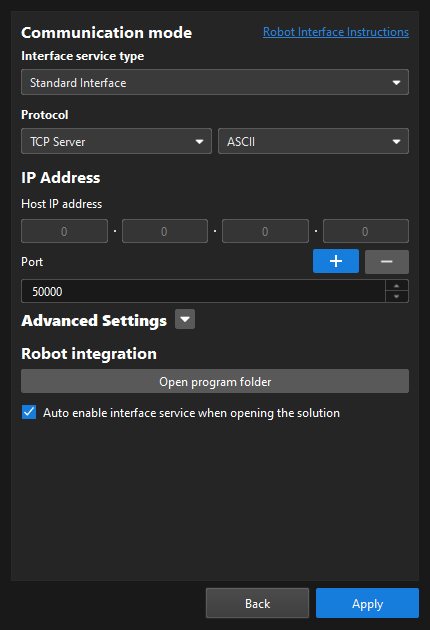
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme sur le robot
-
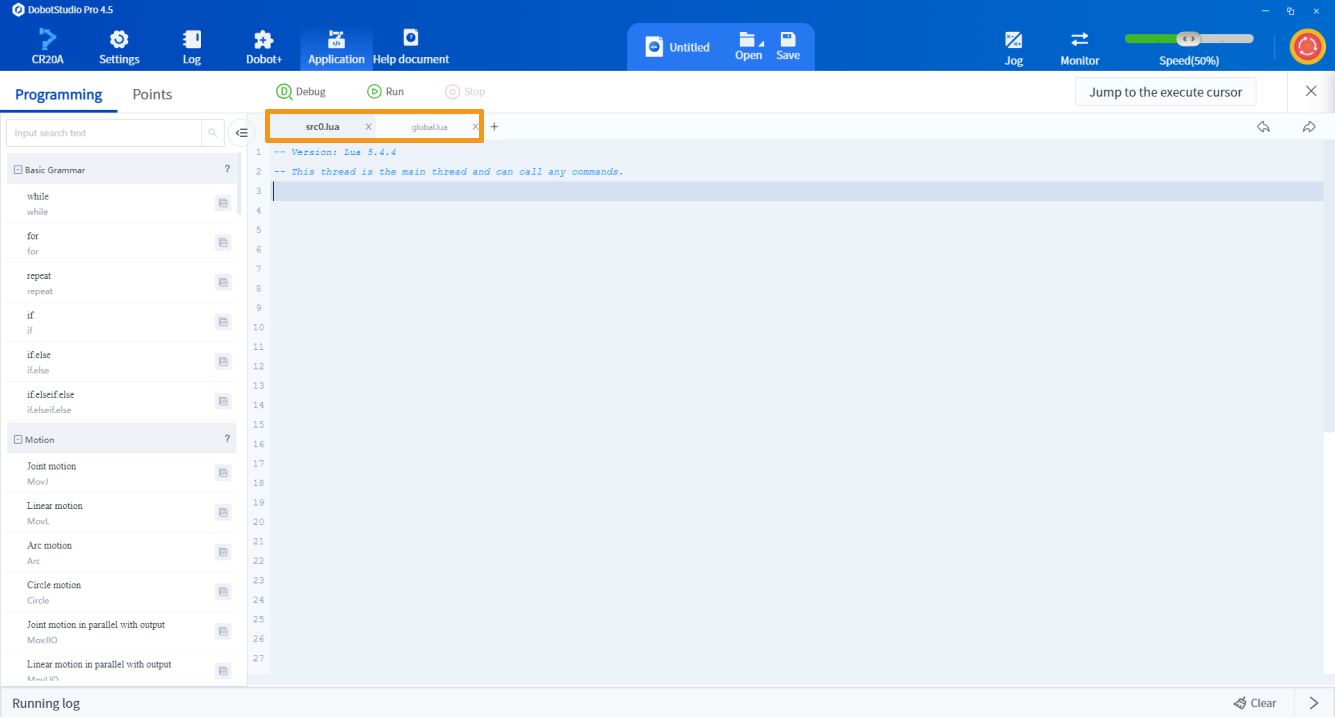
Dans l’interface principale de DobotStudio Pro, cliquez sur Application. Sur la page Application, cliquez sur Programmation par script pour créer un projet de programmation par script. Le projet créé contient deux fichiers vierges : src0.lua et global.lua, comme illustré ci-dessous.
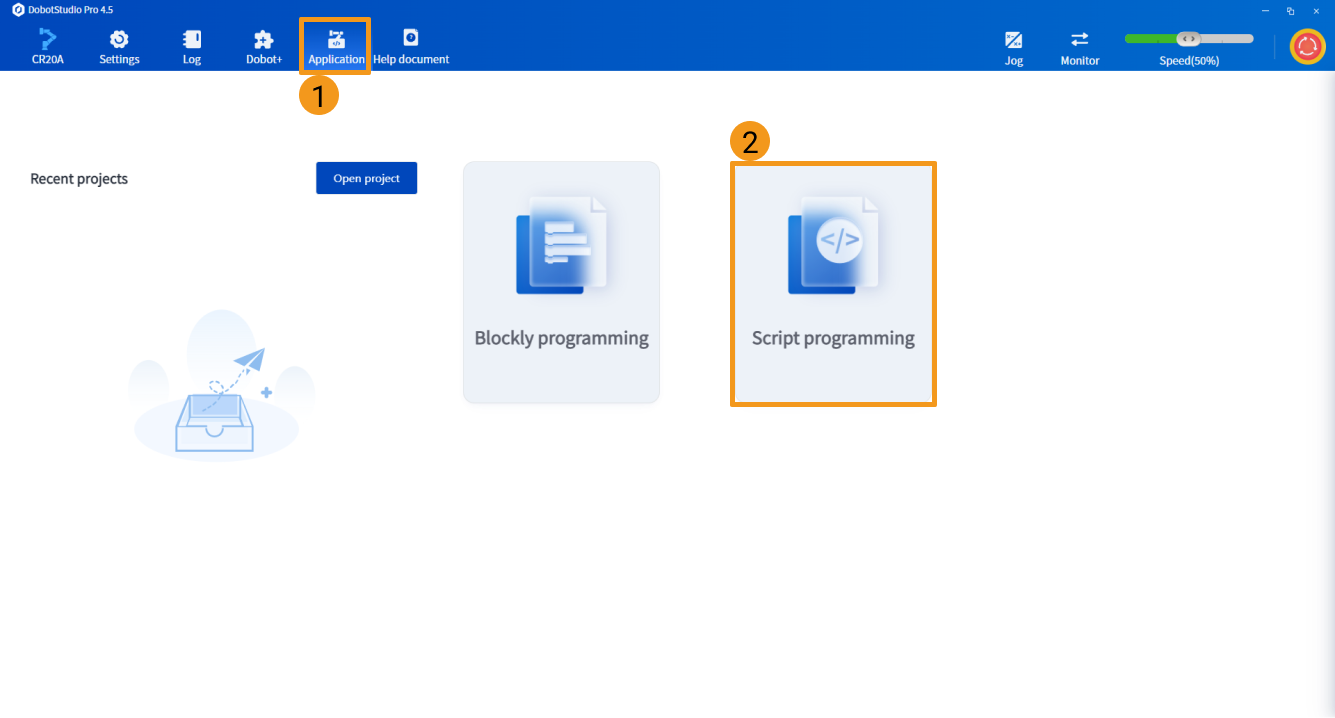
Avant d’effectuer cette étape, veuillez vous assurer que le robot est connecté dans DobotStudio Pro. Pour savoir comment connecter le robot dans DobotStudio Pro, voir l’étape 1 de la section Vérifier la version du contrôleur. -
Dans le dossier de programme ouvert (le dossier
DOBOT), ouvrez le fichier global.lua dans le dossierCRA. Copiez tout le contenu du fichier global.lua vers le fichier global.lua du projet de programmation par script portant le même nom.Vous pouvez également trouver le dossier du programme dans le chemin Communication Component/Robot_Interface/DOBOTdu répertoire d’installation de Mech-Vision et Mech-Viz.
Tester la communication de l’interface standard
-
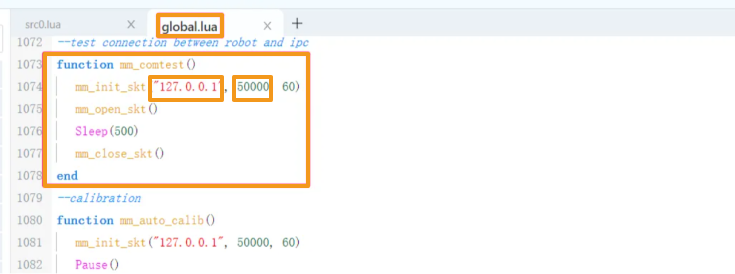
Revenez à l’interface de programmation par script de DobotStudio Pro, trouvez la fonction mm_comtest dans le fichier gobal.lua, puis modifiez l’adresse IP et le numéro de port dans la fonction mm_init_skt pour les valeurs de l’IPC.
-
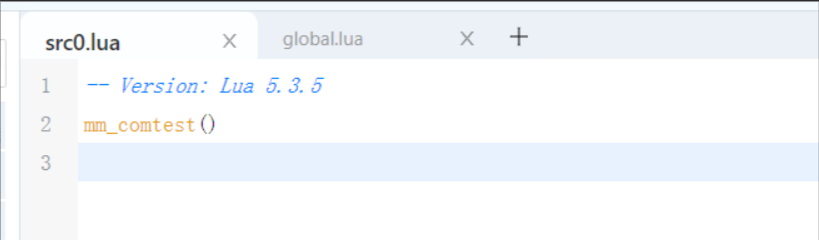
Ouvrez le fichier src0.lua et appelez mm_comtest dans ce fichier.
-
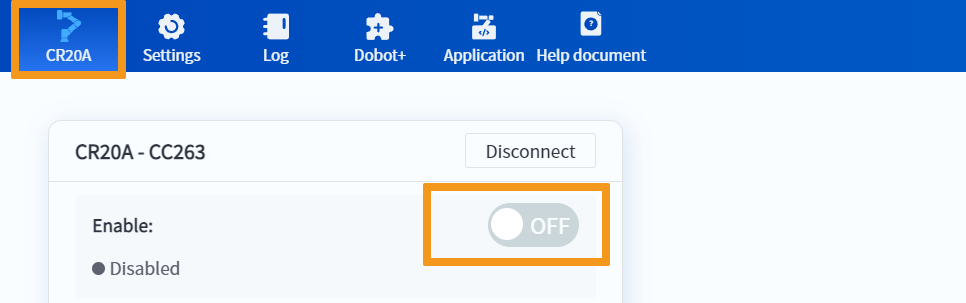
Cliquez sur le bouton d’activation, comme illustré ci-dessous, pour mettre le robot sous tension.
-
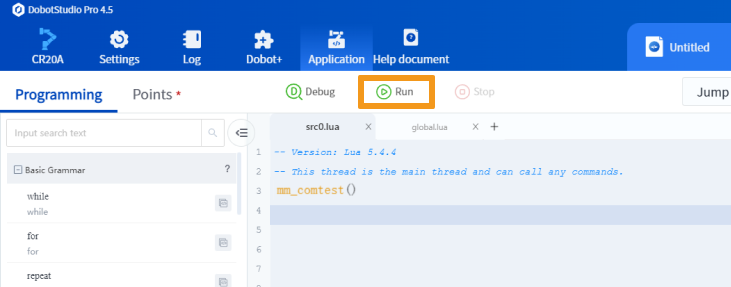
Cliquez sur Exécuter, comme illustré ci-dessous, pour exécuter le programme en cours.
-
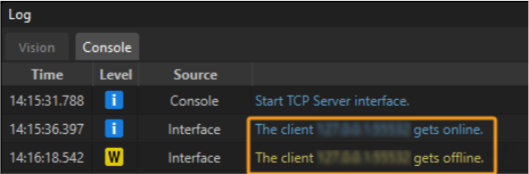
Si le contenu suivant s’affiche dans Mech-Vision, la communication est configurée.