Configuration de la communication maître-contrôle
Ce guide explique comment configurer la communication maître-contrôle avec un robot YASKAWA.
Préparation
Configurer la connexion réseau
Connecter le matériel
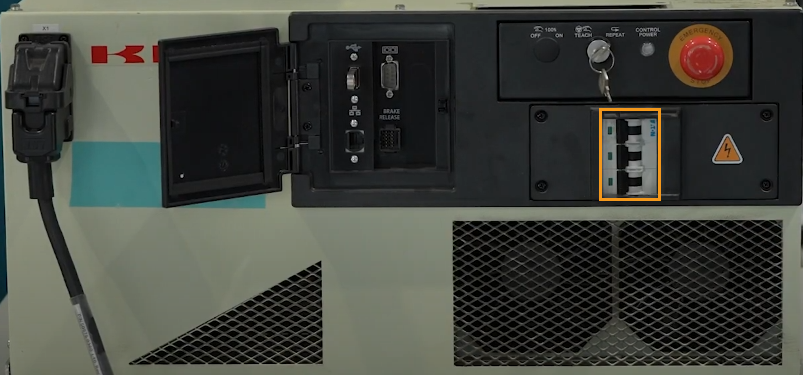
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port réseau du contrôleur du robot.
La carte CPU du contrôleur du robot fournit deux ports Ethernet. Les adresses IP des deux ports doivent appartenir à des sous-réseaux différents.

Configurer l’adresse IP
-
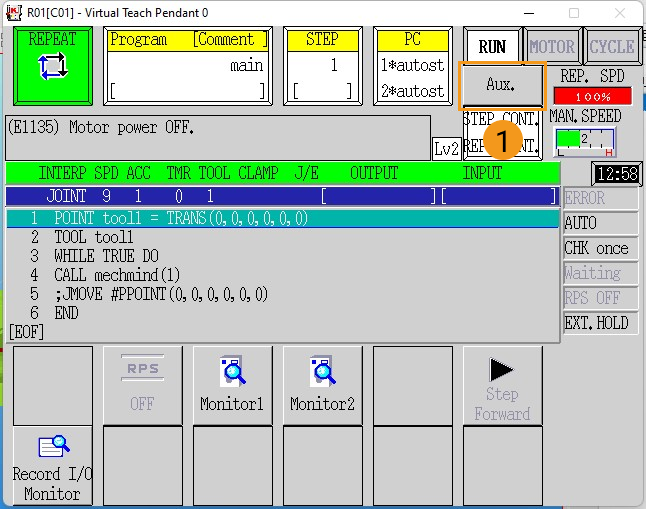
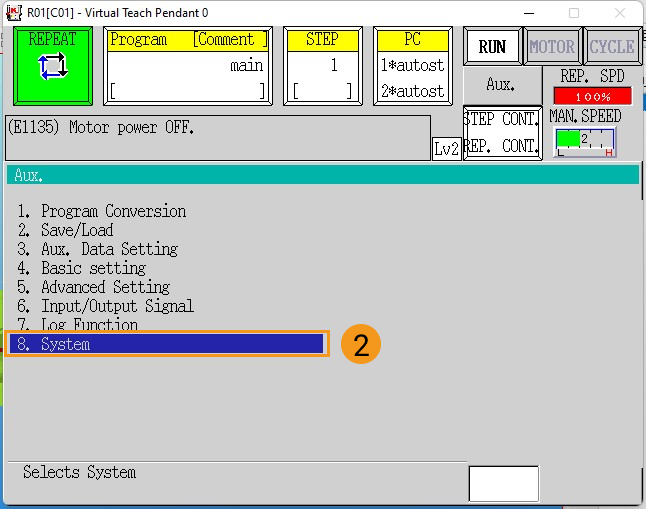
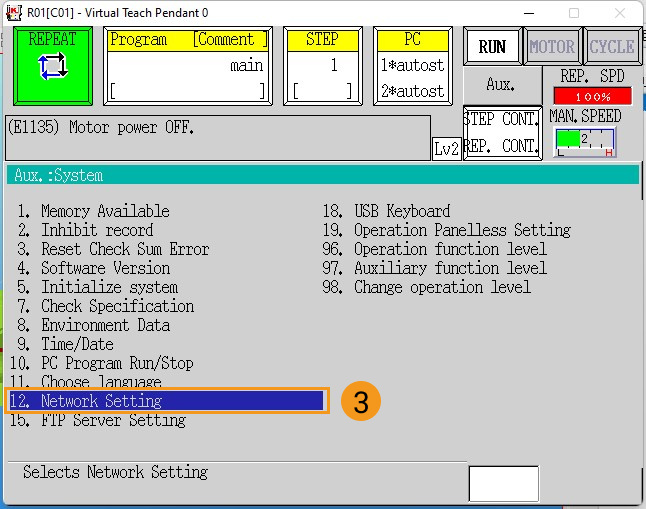
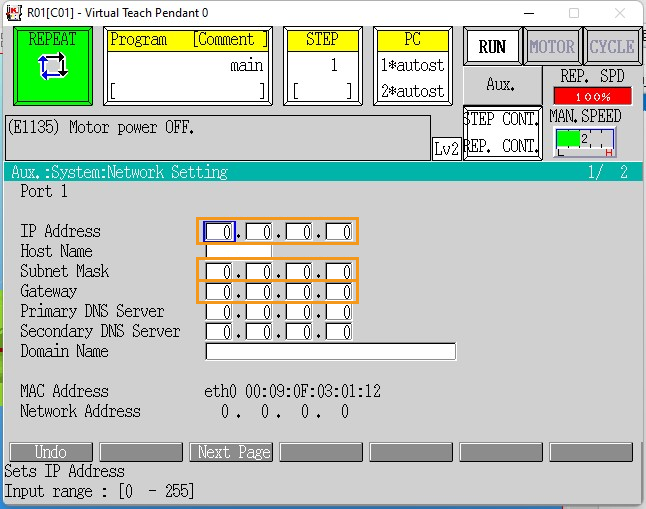
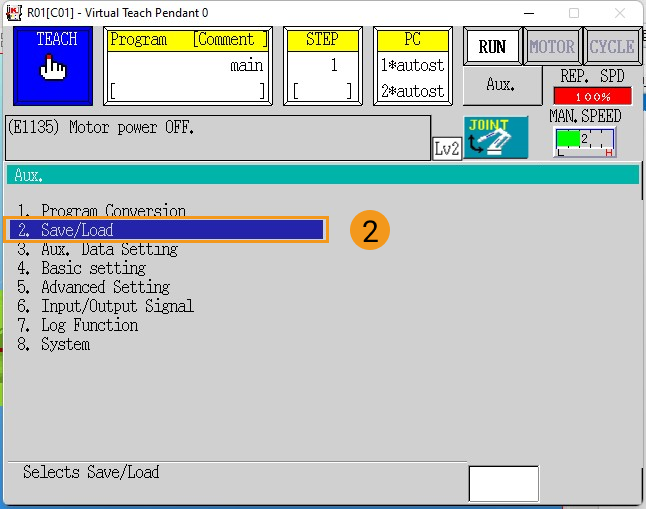
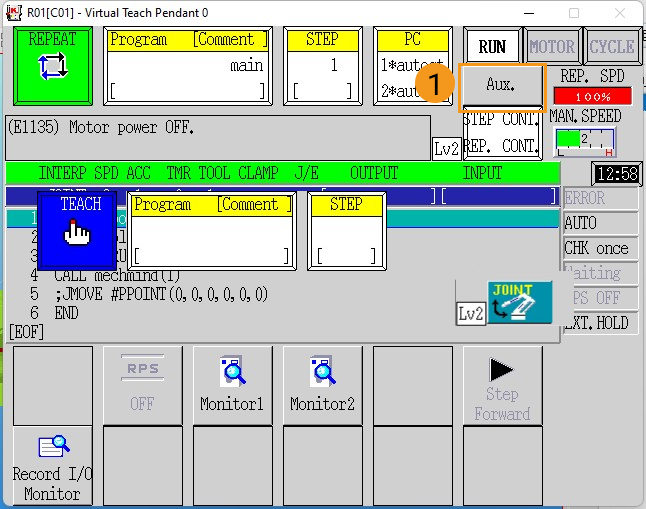
Pour définir l’adresse IP du port Ethernet du robot, appuyez sur le bouton Aux. du boîtier de commande, puis sélectionnez .
-
Définissez l’adresse IP et le masque de sous-réseau du port 1 sur la page de configuration réseau du Port 1. Les adresses IP du robot et de l’IPC doivent se trouver sur le même sous-réseau. Si une passerelle réseau est utilisée, définissez le paramètre Gateway.
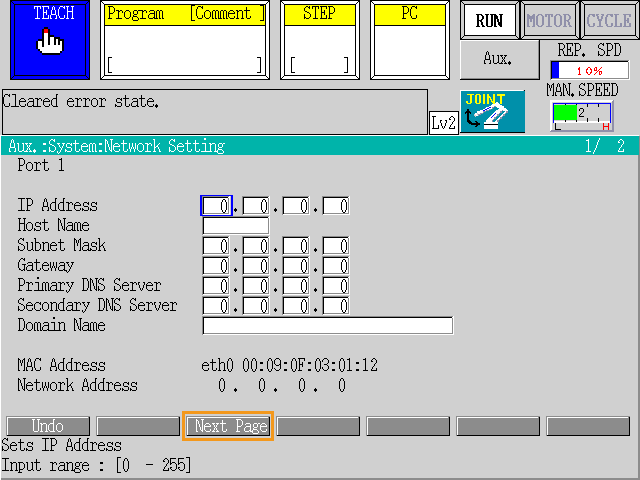
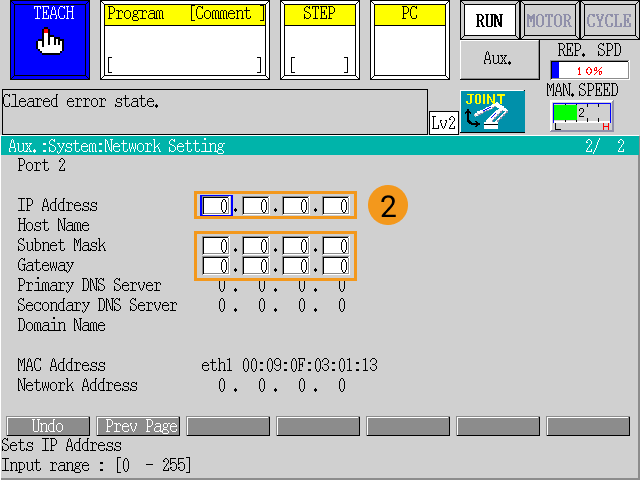
Si le port 2 du robot est utilisé pour la connexion réseau, appuyez sur le bouton Page suivante en bas de la page de configuration réseau du Port 1 pour accéder à la page de configuration du Port 2 et définir l’adresse IP.
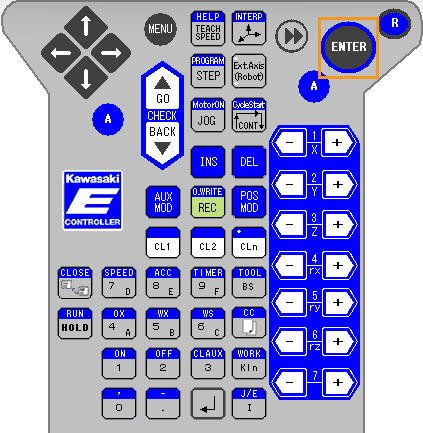
Après avoir défini l’adresse IP, appuyez sur la touche ENTER du boîtier de commande pour confirmer.
-
Redémarrez le contrôleur.
Charger les fichiers de programme sur le robot (Auto)
Vous pouvez effectuer les opérations suivantes pour permettre au chargeur de charger automatiquement les programmes de commande maître sur le robot.
| Si le processus de chargement automatique échoue et que vous ne pouvez pas résoudre le problème, passez à Charger les fichiers de programme sur le robot (Manuel). |
-
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, allez dans le dossier Robot Program Loader via le chemin
Communication Component\tool\Robot Program Loader, puis double-cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur apparaît.Pour changer de langue dans le chargeur, sélectionnez une langue différente dans la liste déroulante en haut à droite et redémarrez le chargeur pour que la nouvelle langue prenne effet. -
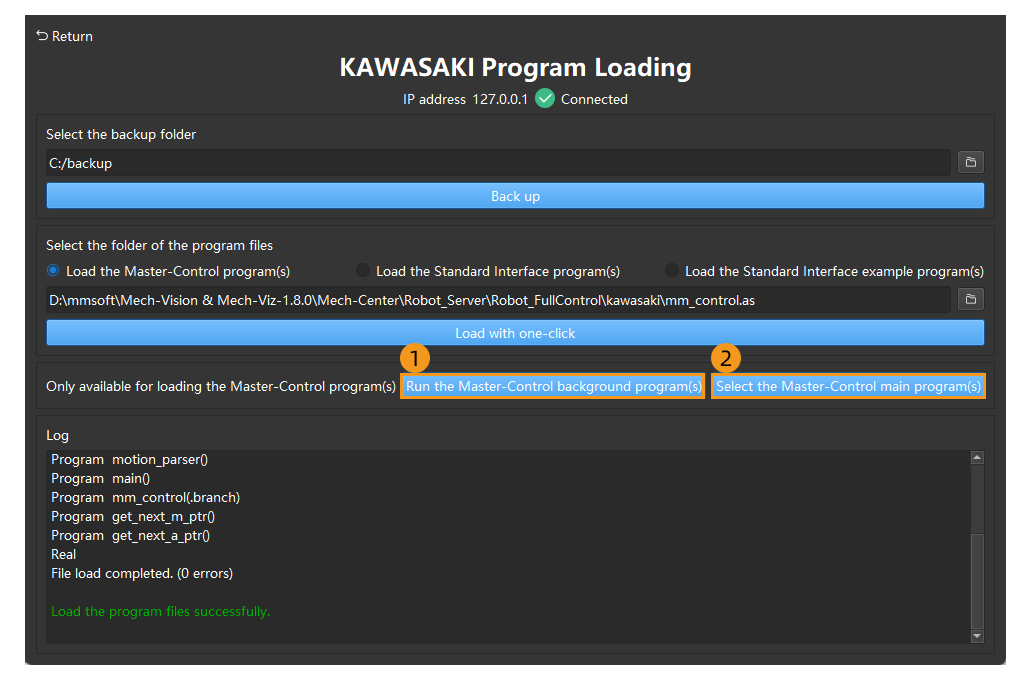
Dans l’interface principale, sélectionnez la marque de robot KAWASAKI, saisissez l’adresse IP réelle du robot, puis cliquez sur Connecter.
Si la connexion échoue, cliquez sur Tester la connexion réseau en bas à droite pour résoudre le problème. 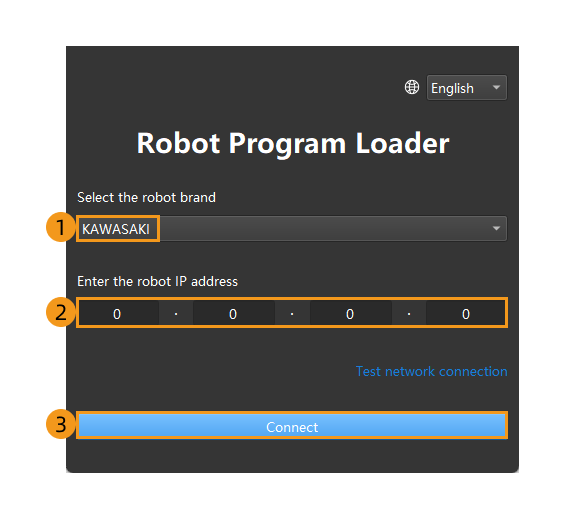
-
Dans l’interface de chargement de programme KAWASAKI, cliquez sur l’icône de dossier, sélectionnez le chemin des fichiers de sauvegarde, puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi s’affiche dans la section Journal.
Si des erreurs surviennent lors du processus de chargement ultérieur, ces fichiers peuvent être utilisés pour réinitialiser le système du robot. 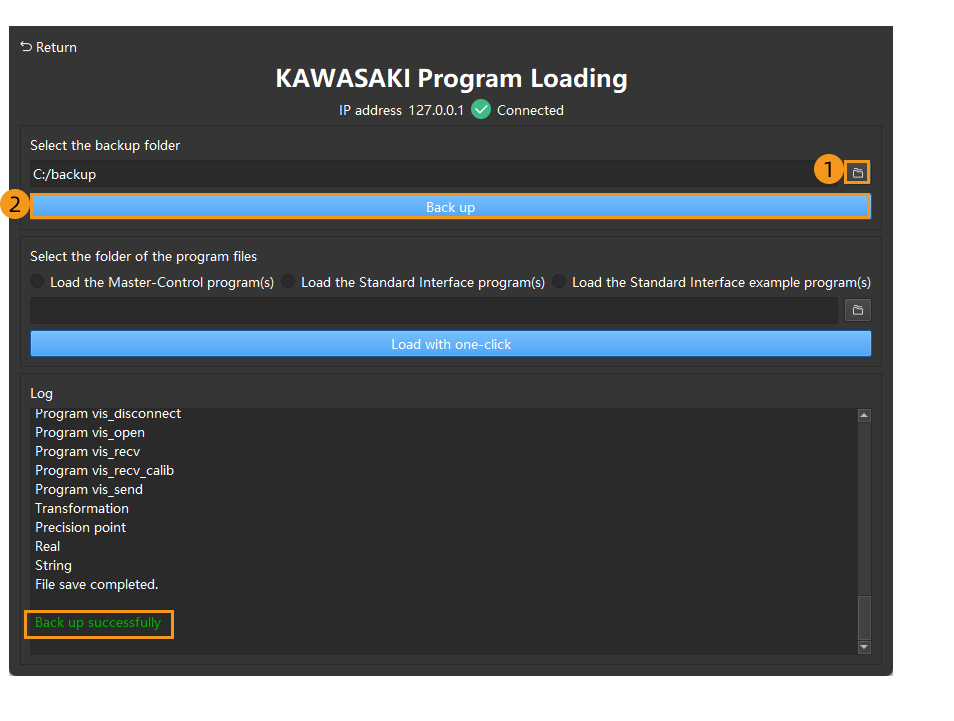
-
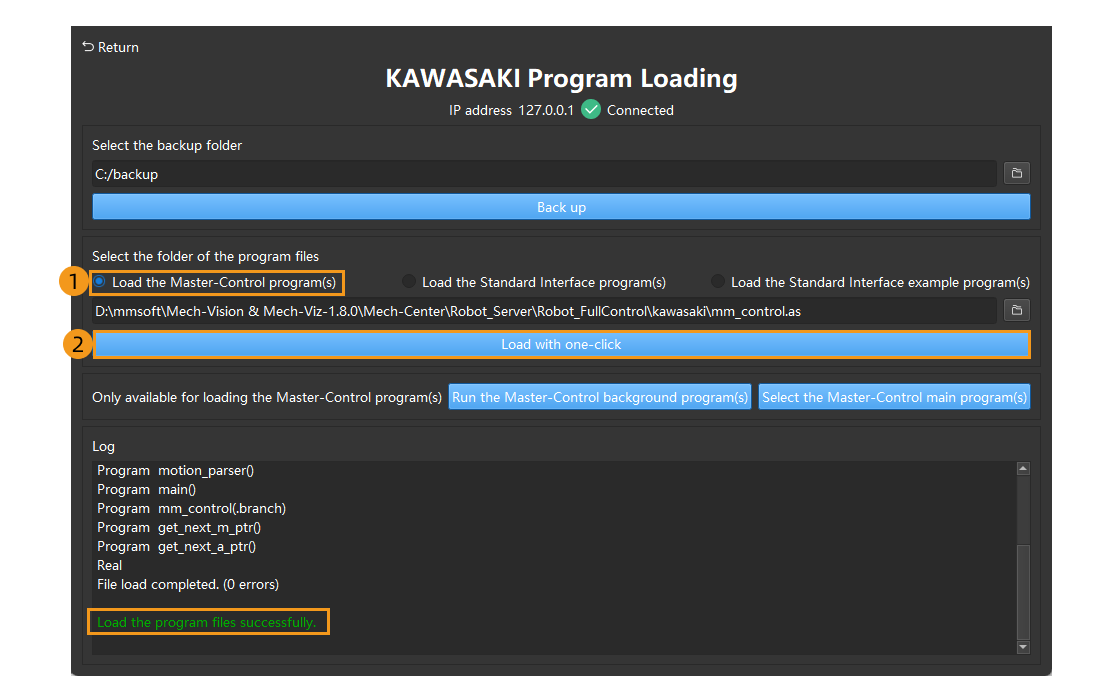
Sélectionnez Charger le(s) programme(s) de commande maître puis cliquez sur Charger en un clic. Si les fichiers sont chargés sur le robot, un message indiquant que les fichiers de programme ont été chargés avec succès apparaît dans la section Journal.
-
Sélectionnez . Si les opérations sont terminées avec succès, un message indiquant que les programmes de commande maître s’exécutent avec succès et un message indiquant que les programmes de commande maître ont été sélectionnés avec succès s’affichent.
-
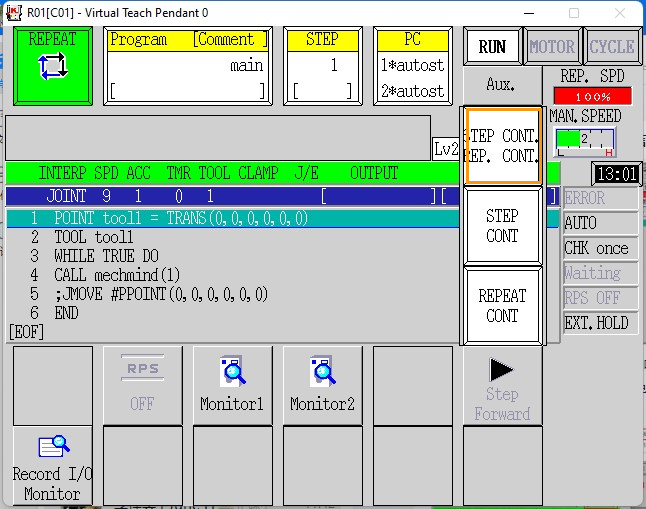
Basculez Teach/Repeat sur le contrôleur vers REPEAT, et mettez le verrou d’enseignement sur le boîtier de commande sur OFF. Après ces opérations, le robot doit être en mode REPEAT.

-
Basculez le mode d’exécution du programme sur STEP CONT and REPEAT CONT sur le boîtier de commande.
Une fois les opérations ci-dessus terminées, passez à Tester la communication maître-contrôle.
Charger les fichiers de programme sur le robot (Manuel)
| Si vous avez effectué les opérations de Charger les fichiers de programme sur le robot (Auto), passez cette section. |
Préparer les fichiers
Les fichiers de programme sont stockés dans Communication Component/Robot_Server/Robot_FullControl/kawasaki dans le répertoire où Mech-Vision et Mech-Viz sont installés.
Copiez le fichier mm_control.as à la racine de la clé USB.
Précautions pour le chargement des fichiers
-
Sauvegarder les programmes utilisateur.
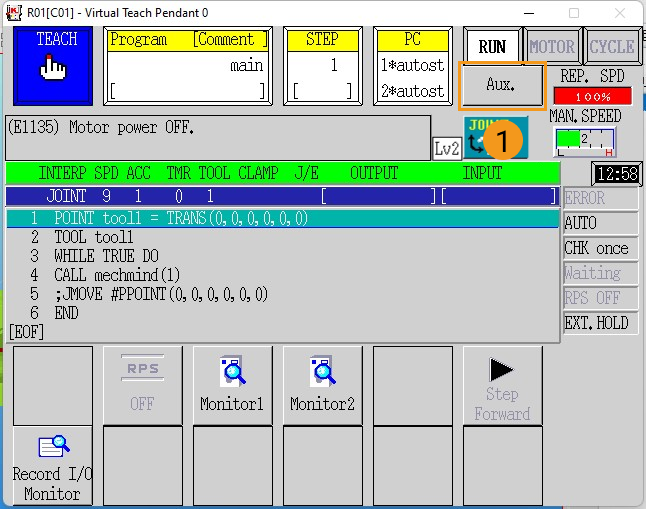
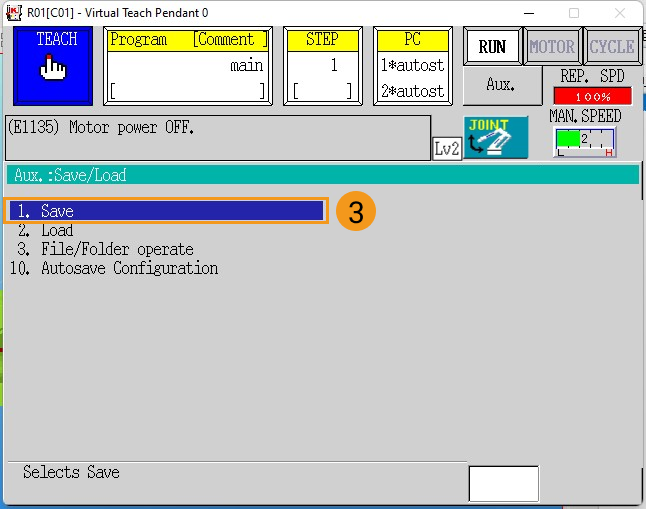
S’il existe des programmes utilisateur dans la liste des programmes sur le boîtier de commande, sauvegardez-les avant de charger les fichiers de programme. S’il n’y a aucun programme utilisateur sur le boîtier de commande, passez cette étape. Appuyez sur le bouton Aux., puis sélectionnez .
Sur la page Enregistrer, appuyez sur Saisir le nom de fichier pour saisir le nom du fichier, puis appuyez sur le bouton Enregistrer. Une fois le fichier enregistré, appuyez sur la touche
Rdu boîtier de commande pour revenir à la page principale.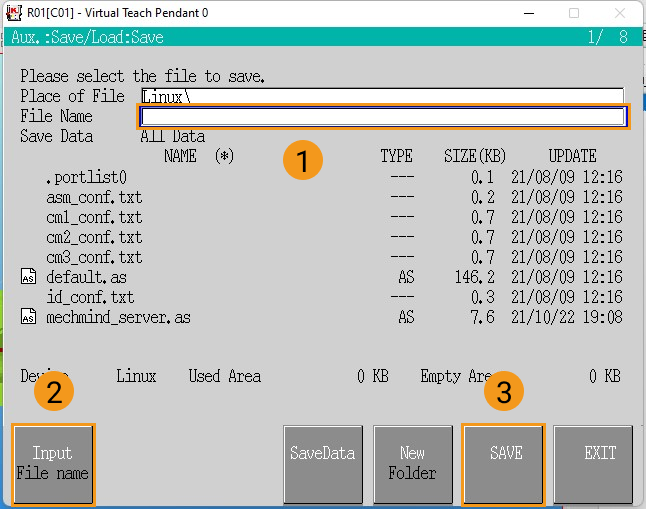
-
Arrêter les programmes frontend et PC du robot.
Avant de charger des fichiers de programme sur le robot, assurez-vous que tous les programmes frontend et PC du robot sont arrêtés. Vérifiez les zones Program et PC sur le boîtier de commande pour vous assurer qu’aucun programme n’est listé. Si un programme existe, arrêtez-le.
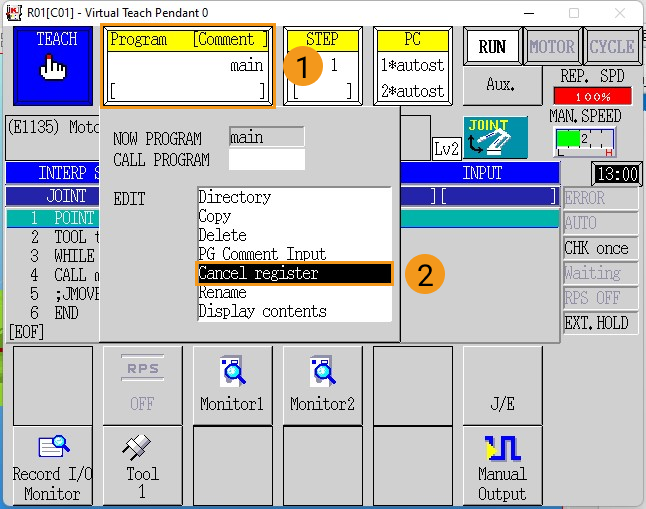
Pour arrêter un programme frontend, appuyez sur la zone Program, puis appuyez sur Annuler l’enregistrement dans le menu déroulant.
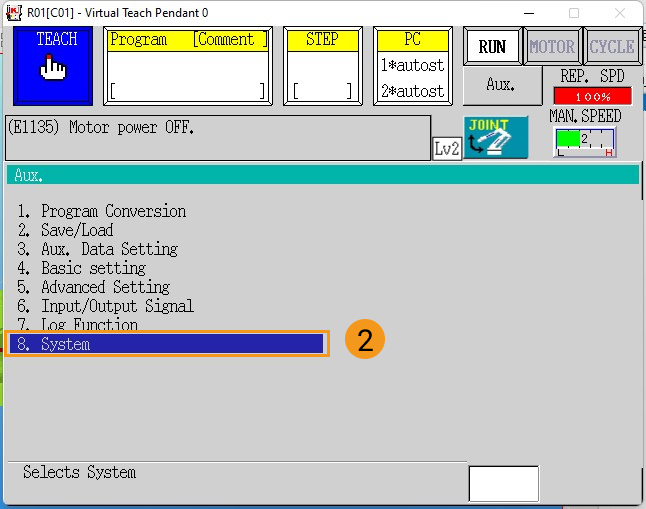
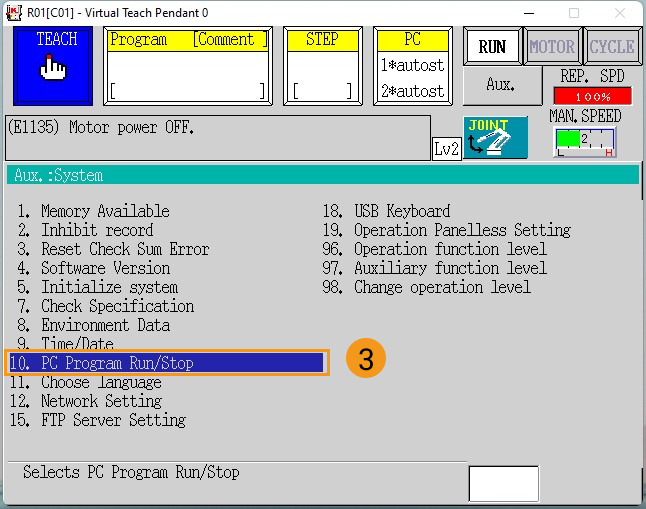
Pour arrêter un programme PC, sur le boîtier de commande, appuyez sur le bouton Aux., puis sélectionnez .
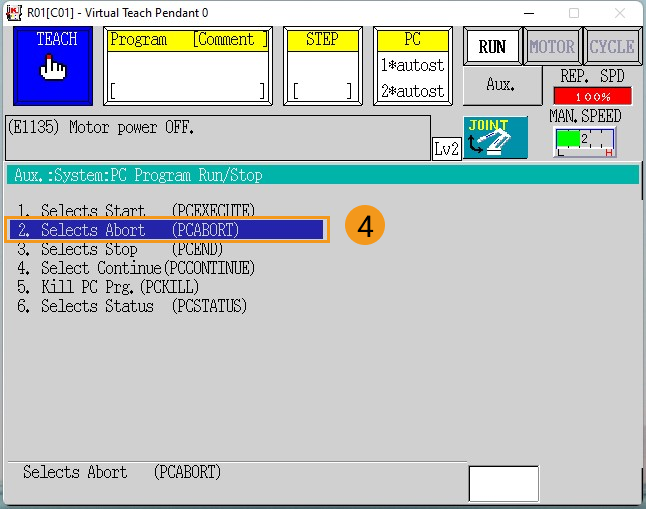
Appuyez sur la touche
ENTERpour interrompre le programme PC 1. Puis appuyez sur 2 pour changer le numéro du programme à 2, et appuyez sur la toucheENTERpour interrompre le programme PC 2. Enfin, appuyez surRpour revenir à la page précédente.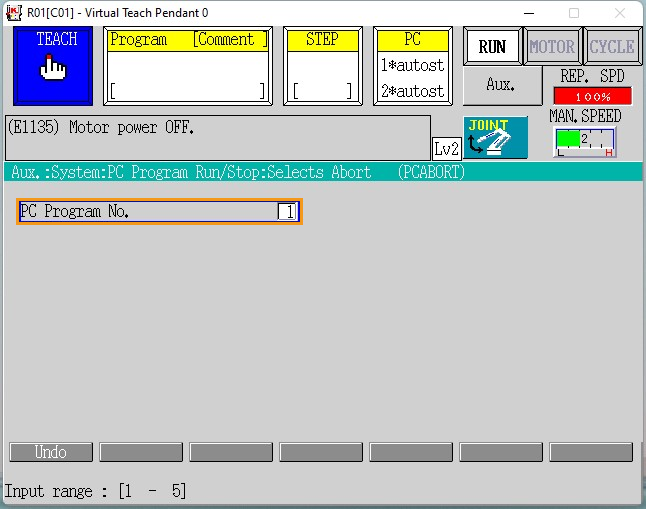
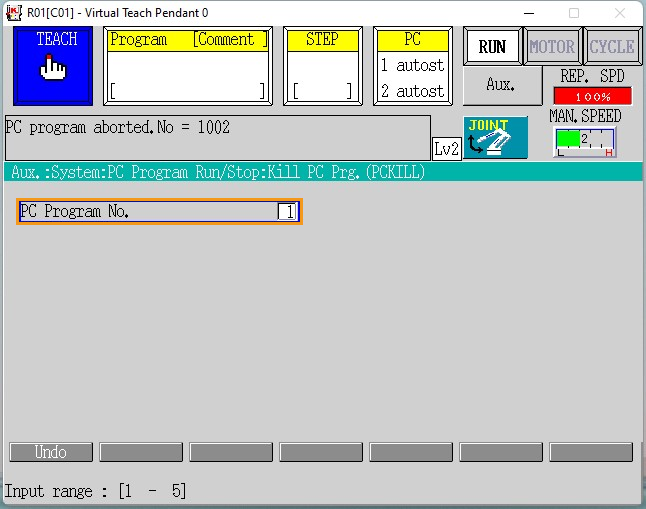
Sélectionnez 5. Kill PC Prog., puis appuyez sur la touche
ENTERpour arrêter le programme PC 1. Ensuite, appuyez sur 2 pour changer le numéro du programme PC à 2, et appuyez sur la toucheENTERpour arrêter le programme PC 2. Enfin, appuyez surRpour revenir à la page précédente.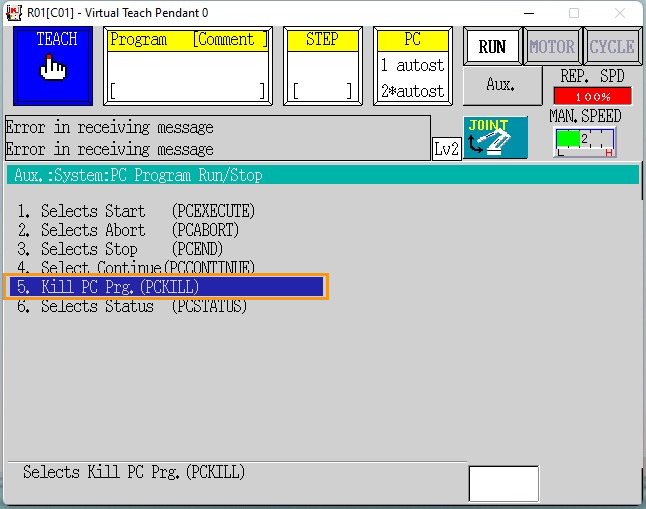
-
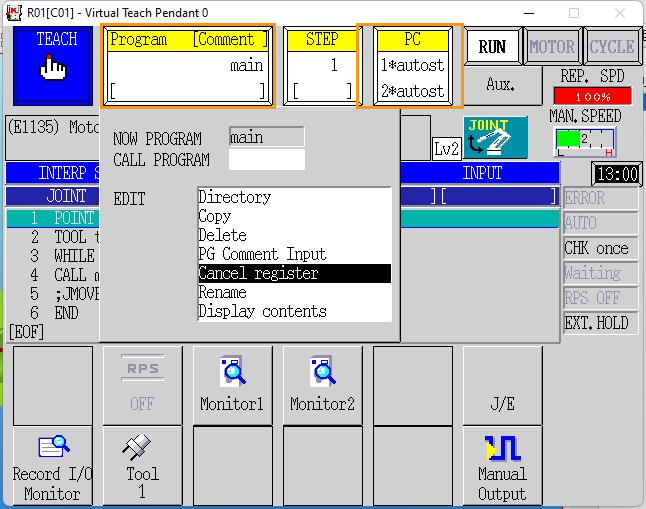
Assurez-vous que le robot est en mode teach, et que les zones Program et PC ne listent rien, comme ci-dessous.
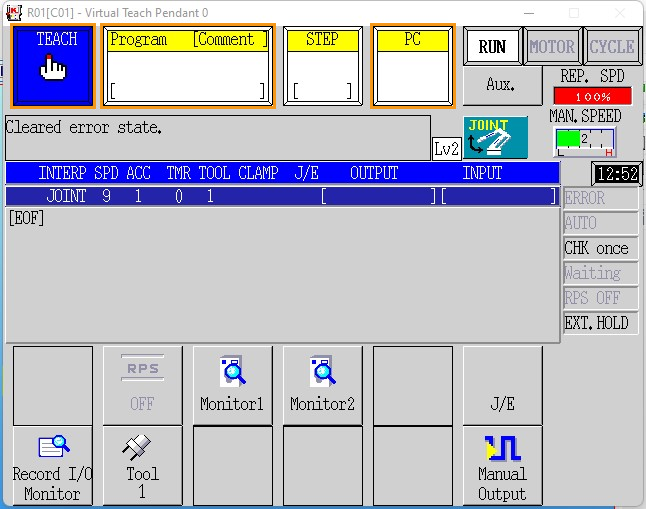
Si des programmes existent dans la zone PC, répétez les opérations précédentes pour les arrêter jusqu’à ce qu’il n’y ait plus de programme dans la zone PC.
Charger les fichiers de programme sur le robot
-
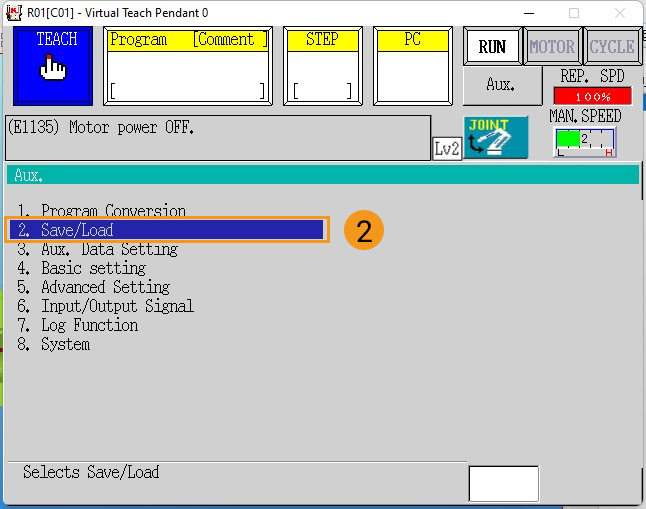
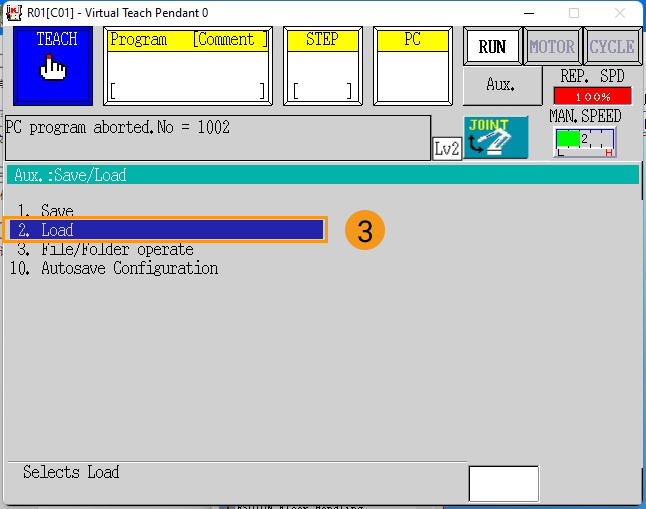
Insérez la clé USB contenant les fichiers de programme dans le port USB à l’intérieur du panneau accessoire sur le contrôleur. Puis, sur le boîtier de commande, appuyez sur Aux., et sélectionnez .
-
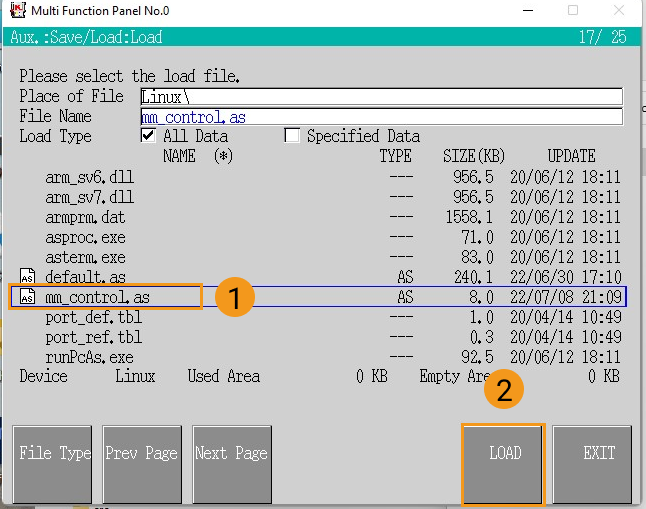
Appuyez deux fois sur mm_control.as dans la liste des fichiers pour le sélectionner (mm_control.as affiché en tant que nom de fichier), puis appuyez sur le bouton CHARGER.
-
Après le chargement du fichier, assurez-vous qu’aucune erreur ne s’est produite pendant le chargement et appuyez sur la touche
Rdu boîtier de commande pour quitter.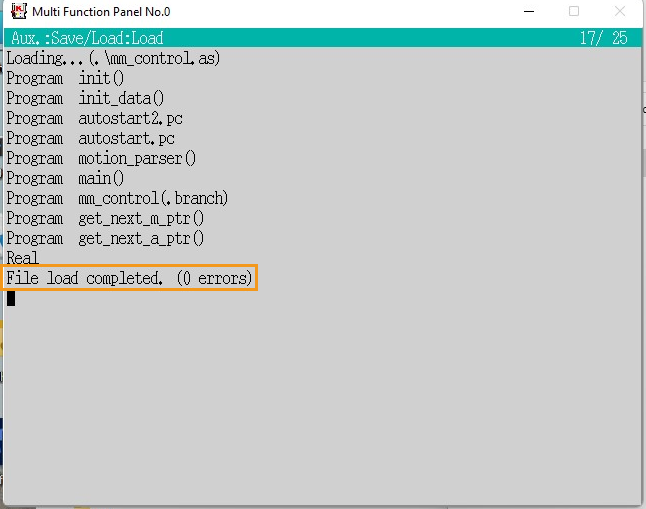
Configurations supplémentaires
-
Sélectionner le programme principal frontend.
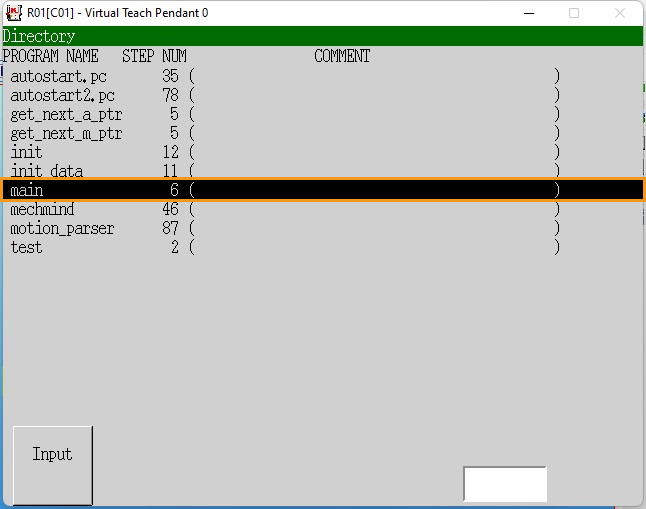
Appuyez sur la zone Program et sélectionnez Directory. Ensuite, sélectionnez main et appuyez sur la touche
ENTERdu boîtier de commande pour enregistrer les modifications. Assurez-vous qu’aucun autre programme n’est listé dans la zone PC.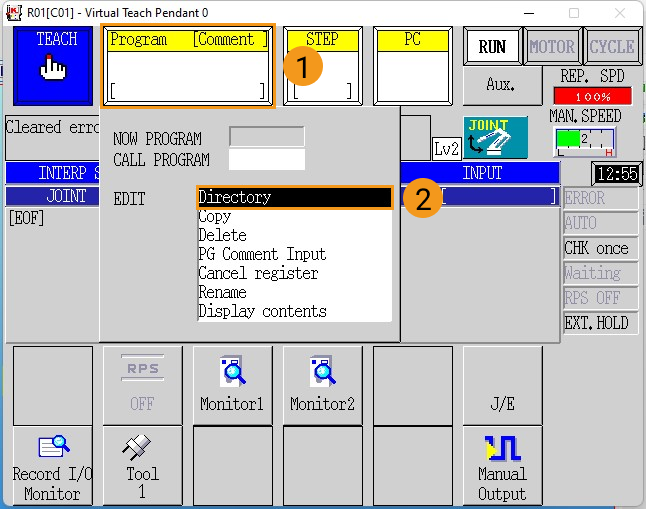
-
Basculer le robot en mode repeat.
Basculez Teach/Repeat sur le contrôleur vers REPEAT, et mettez le verrou d’enseignement sur le boîtier de commande sur OFF. Après ces opérations, le robot doit être en mode REPEAT.
Ensuite, basculez le mode d’exécution du programme sur STEP CONT and REPEAT CONT.
-
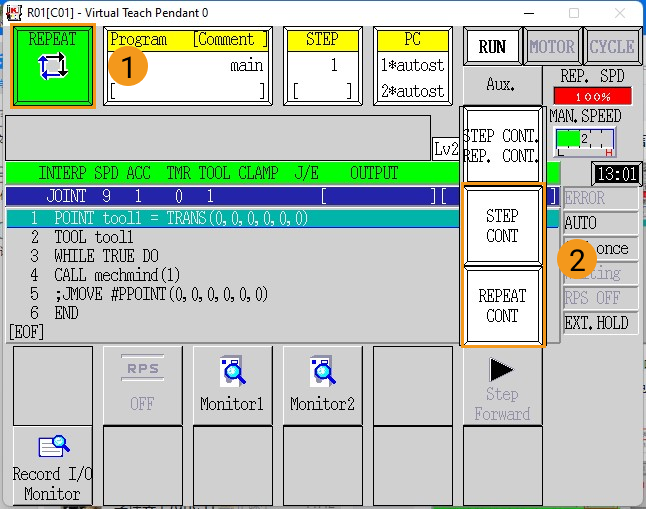
Redémarrer le contrôleur du robot.
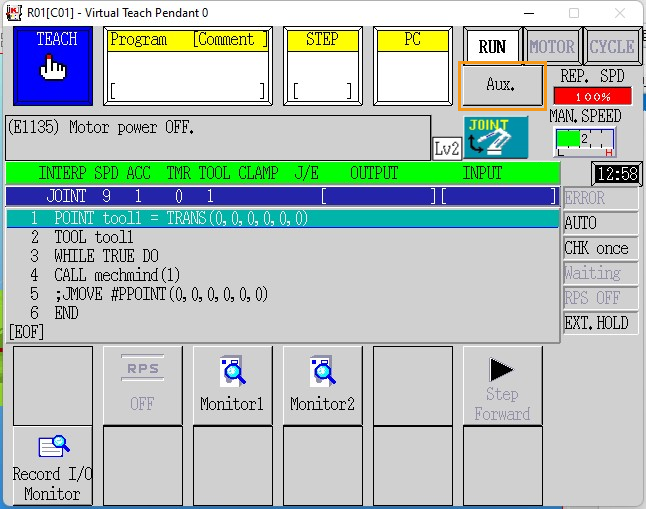
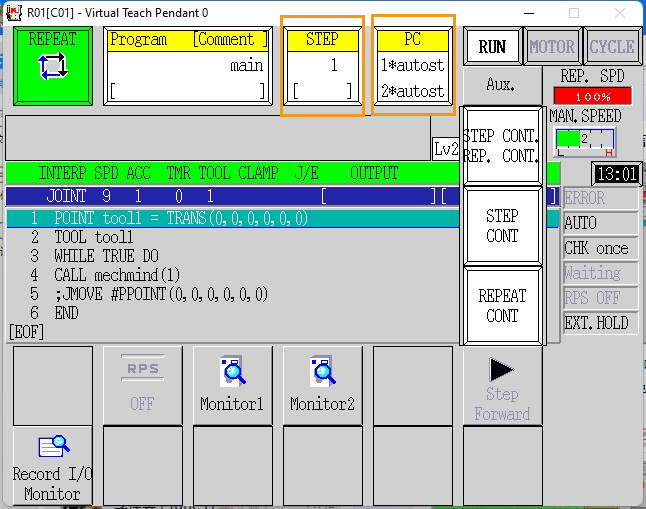
Après le redémarrage du contrôleur du robot, le boîtier de commande doit afficher l’interface suivante. Les programmes PC avec un astérisque (*) devant indiquent que les programmes sont en cours d’exécution. Si l’étape en cours n’est pas 1 dans la zone STEP, modifiez-la manuellement en appuyant sur la zone STEP et en saisissant 1.
Tester la communication maître-contrôle
Exécuter le programme
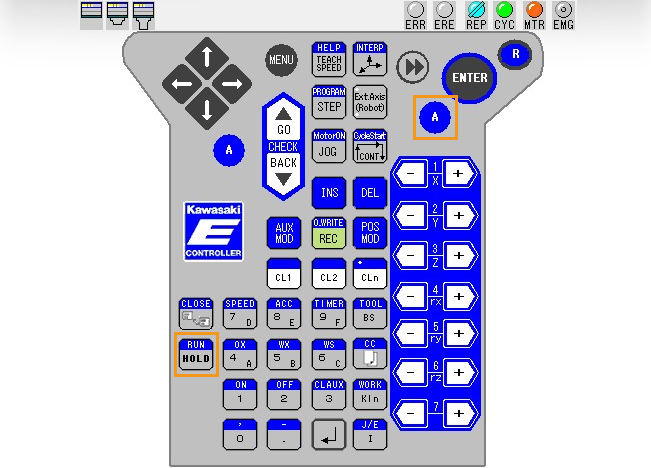
Maintenez la touche A et appuyez sur MOTOR pour alimenter le moteur.
Maintenez la touche A et appuyez sur CYCLE pour démarrer le robot.
Si RUN ne devient pas vert, maintenez la touche A et appuyez sur la touche RUN/HOLD sur le boîtier de commande.
|
Créer un projet Mech-Viz
-
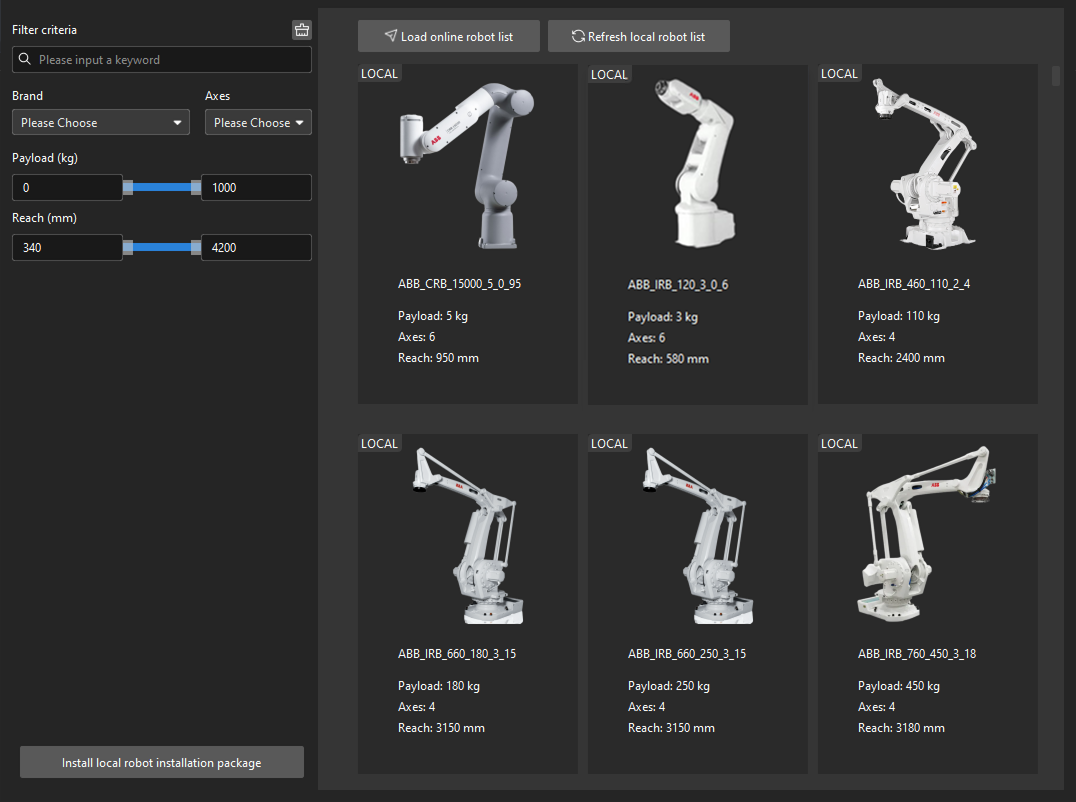
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
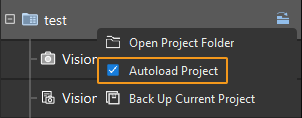
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
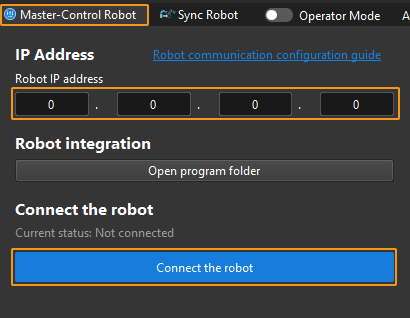
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
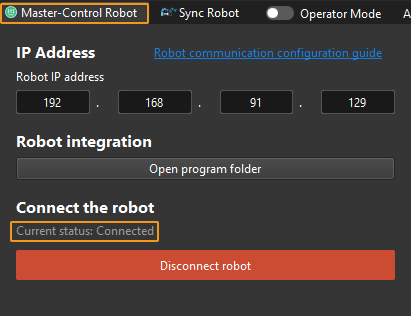
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
Déplacer le robot
-
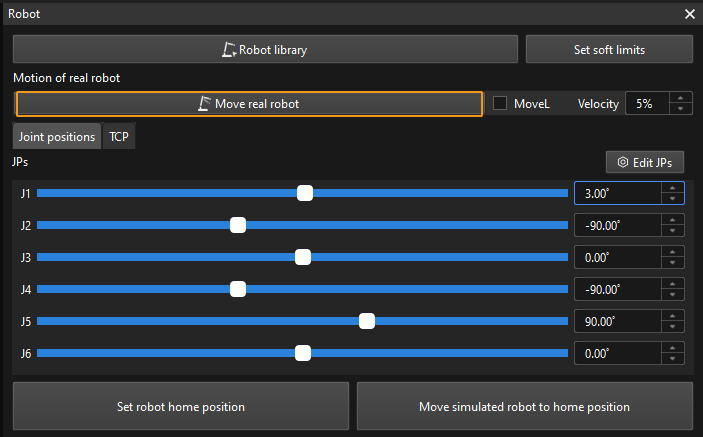
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
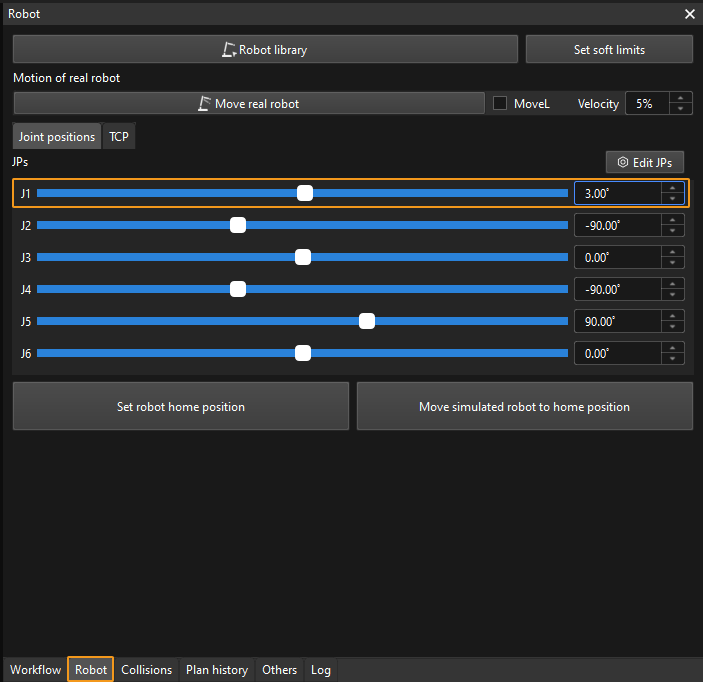
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !