Configuration de la communication et utilisation du programme d’exemple
Ce sujet fournit des instructions pour configurer la communication Standard Interface basée sur le protocole PROFINET entre un API Siemens SIMATIC S7 utilisant le logiciel TIA Portal et le système de vision Mech-Mind.
Exigences matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
-
API Siemens SIMATIC S7 :
-
S7-300 (avec interface PROFINET ou CP 343-1 intégré pour fonctionner comme contrôleur PROFINET IO)
-
S7-400 (avec interface PROFINET ou CP 443-1 intégré pour fonctionner comme contrôleur PROFINET IO)
-
S7-1200
-
S7-1500
-
-
Adaptateur d’alimentation 220 V CA vers 24 V CC
-
Carte d’interface esclave PCIe HMS Ixxat INpact PIR installée sur l’IPC du système de vision Mech-Mind
-
Commutateur réseau et câbles Ethernet
| Cet exemple utilise S7-1200, CPU 1211C, V4.2. |
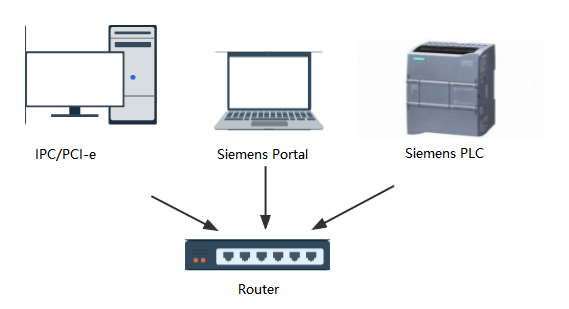
La connexion matérielle est la suivante. Chaque appareil possède une adresse IP unique, mais toutes doivent se trouver sur le même sous-réseau et ne pas être utilisées par d’autres appareils. Pour les paramètres d’adresse IP de l’API et de la carte de communication, reportez-vous à la section ci-dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur sur lequel TIA Portal est installé, voir ce lien.
Logiciel
-
Logiciel de programmation d’API Siemens TIA Portal V15.1
-
VCI V4 (logiciel pilote pour la carte d’interface esclave INpact PIR PCIe)
-
Fichier de description d’appareil GSD : GSDML-V2.35-MM-PIR-20220315.xml. Si la version du fichier GSD est mise à niveau, la version ou la date peut différer. Le fichier GSD se trouve dans
Communication Component/Robot_Interface/PROFINETdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. -
Fichiers de programme d’exemple pour l’API :
-
Camera_IO.scl (module de communication PROFINET IO fondamental)
-
MM Profinet Interface Program.scl (utilisé pour implémenter les fonctionnalités de diverses fonctions d’interface)
-
PLCTags.xlsx (Table des variables du système Mech-Mind).
Les fichiers d’exemple sont stockés dans
Communication Component/Robot_Interface/PROFINET/Programming Samples/Siemens TIA Portal S7-1200 PLC PROFINETdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. -
Configurer l’IPC et initier la communication
Vérifier la carte PCI-e et le pilote
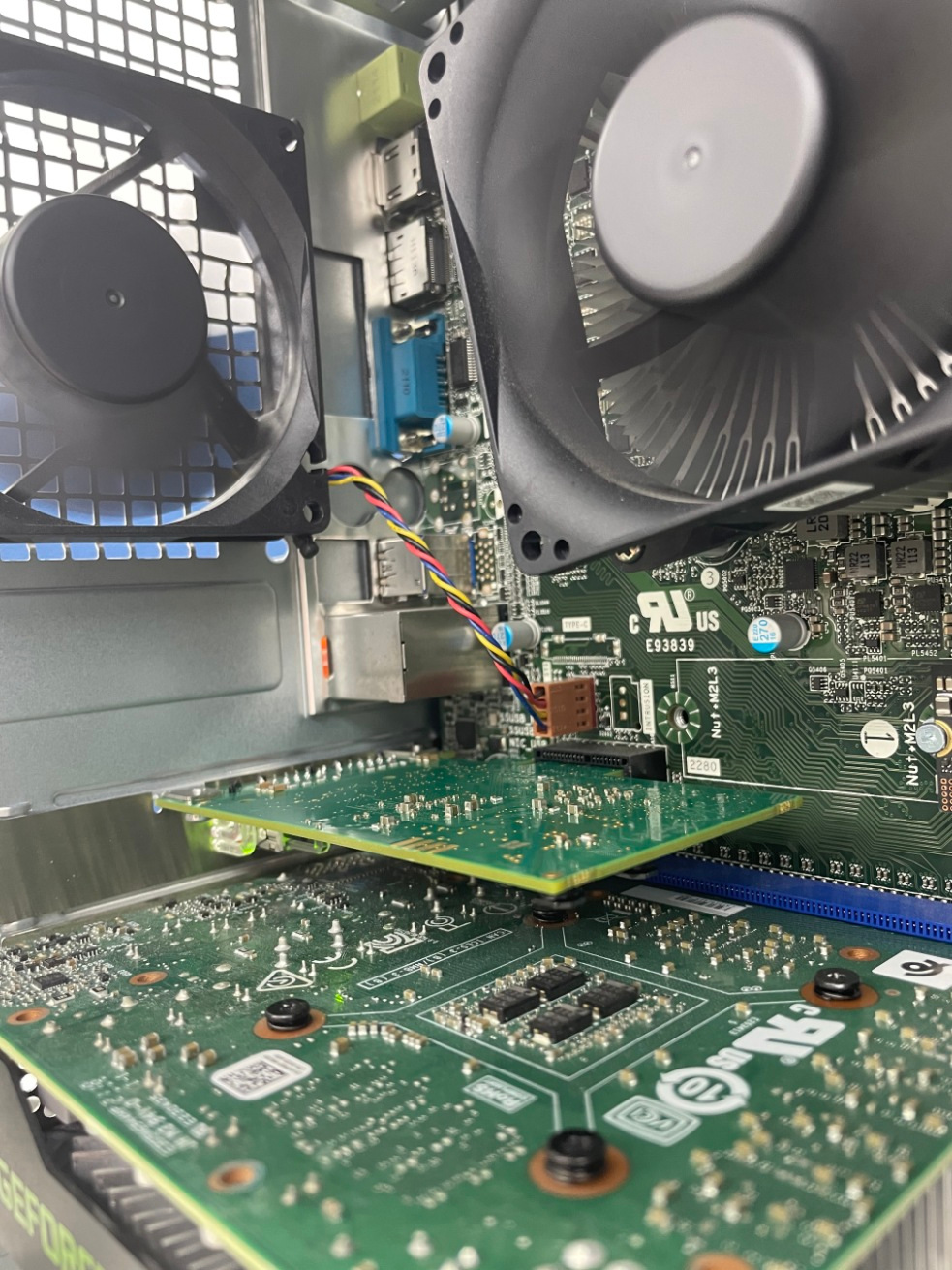
-
Vérifiez le slot PCI-e de l’IPC et assurez-vous que la carte d’interface esclave INpact PIR PCIe est installée.
-
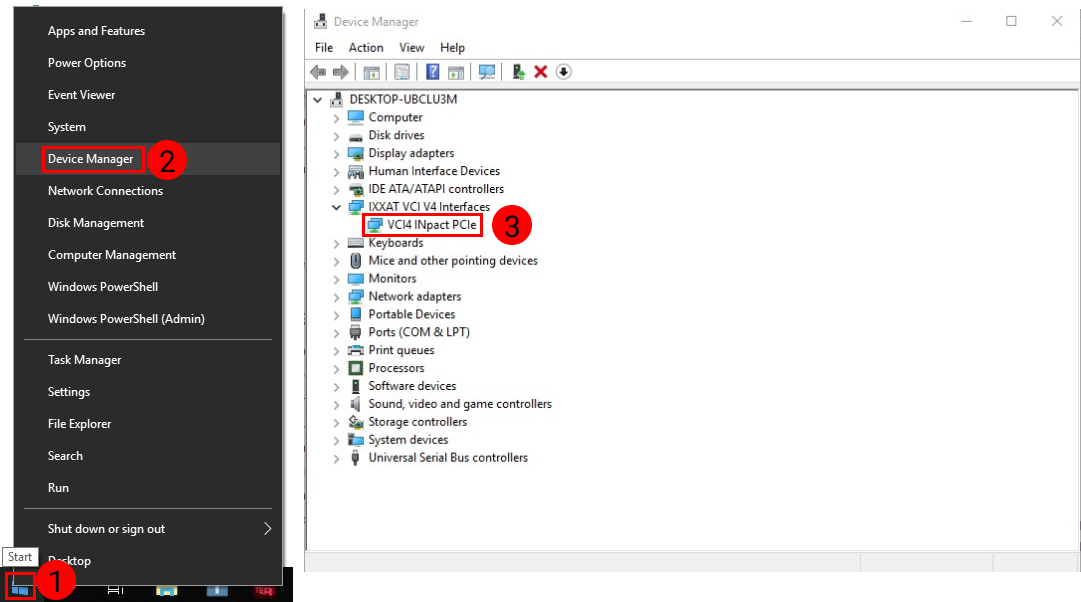
Assurez-vous que le pilote est installé sur l’IPC : faites un clic droit sur l’icône Windows et cliquez sur Gestionnaire de périphériques pour l’ouvrir. Trouvez VCI4 INpact PCIe sous IXXAT VCI V4 Interfaces.
Configurer la communication côté robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
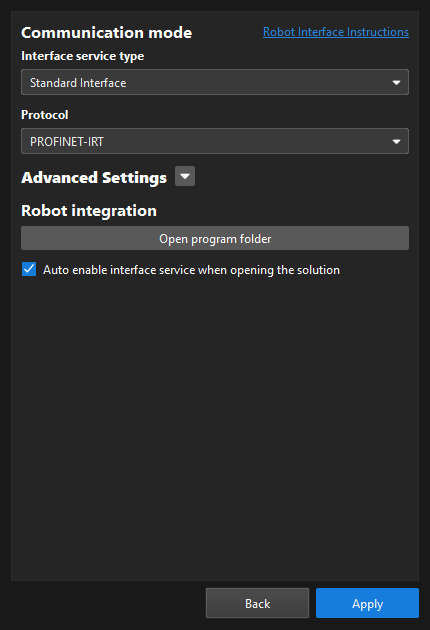
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface et sélectionnez PROFINET-IRT pour Protocole.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication robot dans la barre d’outils est basculé et devient bleu.

Créer et configurer le projet API
Créer un projet API
-
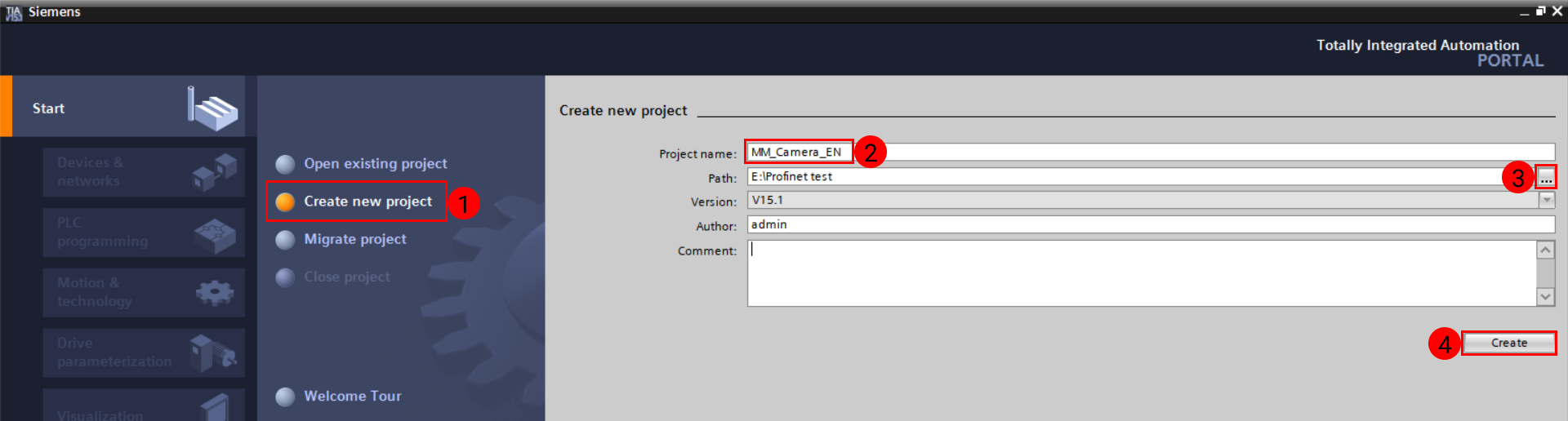
Ouvrez TIA Portal et cliquez sur Create new project. Saisissez le nom du projet et le chemin, puis cliquez sur Create. Cliquez sur Open the project view dans la page contextuelle.
-
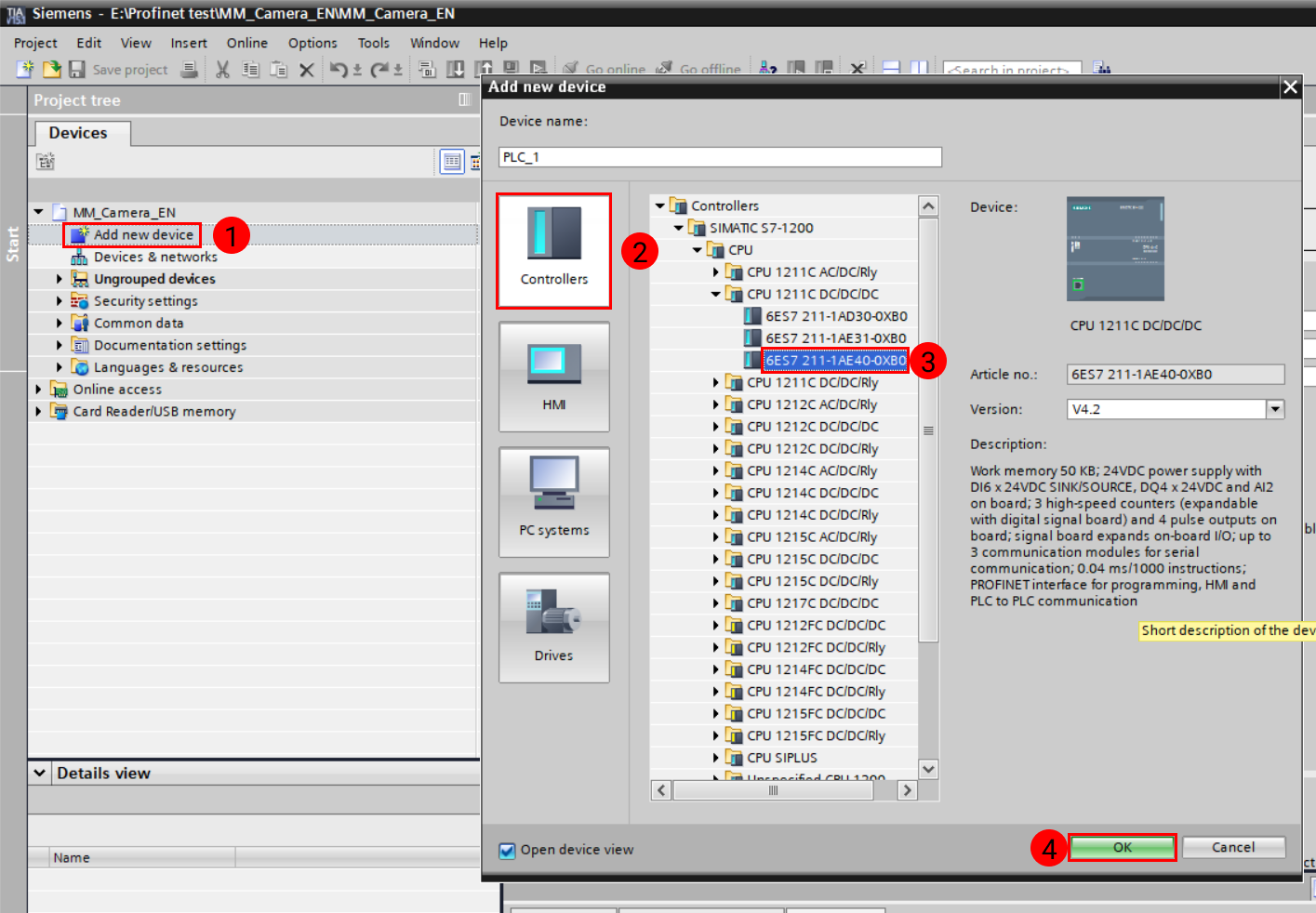
Dans le panneau Arborescence du projet, double-cliquez sur Add new device. Dans la nouvelle fenêtre, cliquez sur Controllers, trouvez le module CPU que vous utilisez et saisissez le nom dans le champ sous « Nom de l’appareil ». Cliquez sur OK pour confirmer l’ajout de l’appareil. Ici, l’appareil est nommé PLC_1.
-
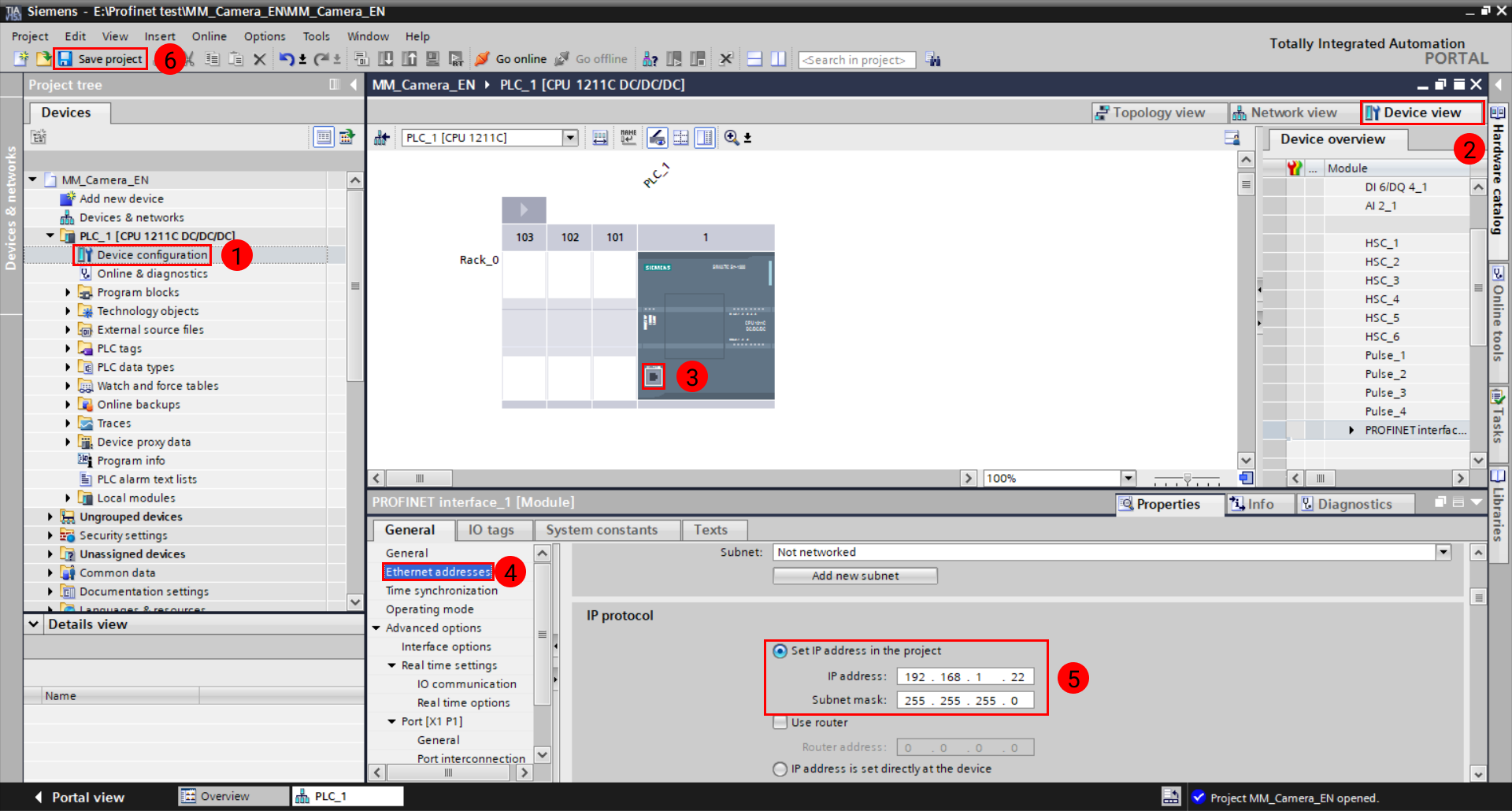
Dans le panneau Arborescence du projet, double-cliquez sur Device configuration, cliquez sur Device view, puis double-cliquez sur l’icône Ethernet dans PLC_1. Dans l’onglet Propriétés/Général, cliquez sur Ethernet addresses pour définir l’adresse IP de l’API et conservez le masque de sous-réseau par défaut. Enfin, cliquez sur Save project.
Installer le fichier GSD et configurer le réseau
-
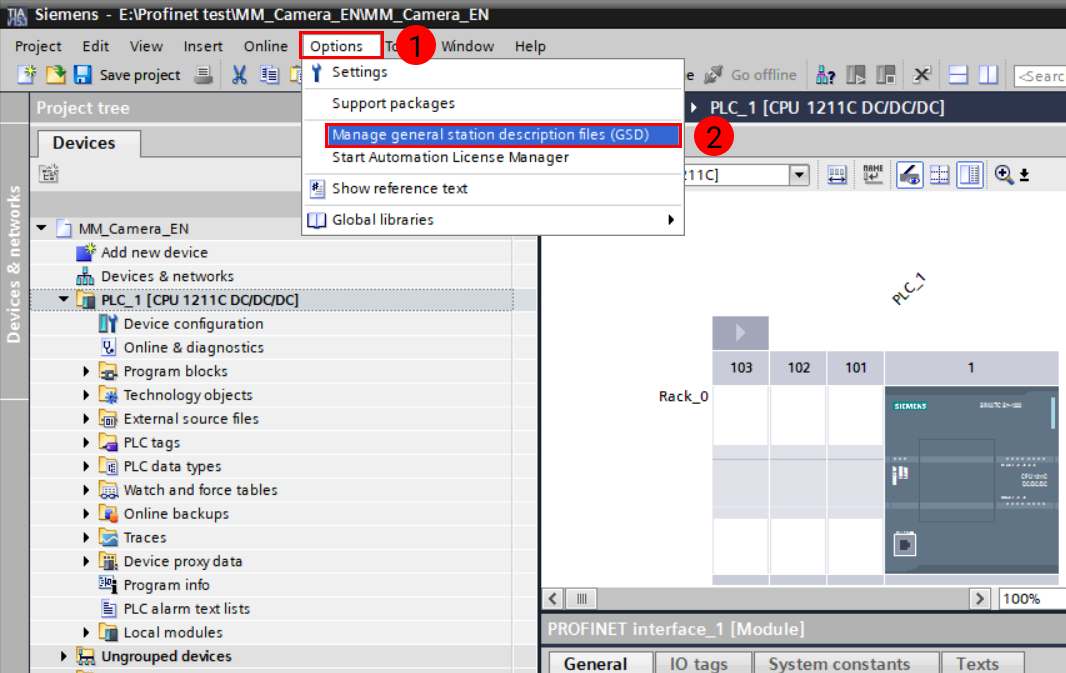
Dans la barre de menu, sélectionnez .
-
Dans la fenêtre contextuelle, cliquez sur Installed GSDs, puis cliquez sur … à droite de Chemin source. Localisez le chemin où est stocké le fichier GSD. Cochez ce fichier dans Contenu du chemin importé, puis cliquez sur Install. Fermez la fenêtre une fois l’installation terminée.
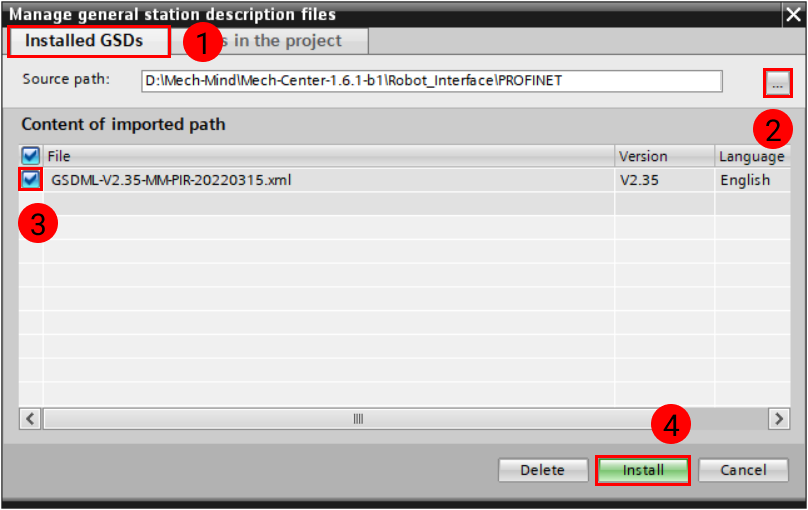
Le fichier GSD se trouve dans l’IPC. Le fichier GSD est situé dans Communication Component/Robot_Interface/PROFINETdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez le fichier depuis l’IPC vers l’ordinateur sur lequel TIA Portal est installé à l’avance, puis cliquez sur … pour localiser ce dossier. -
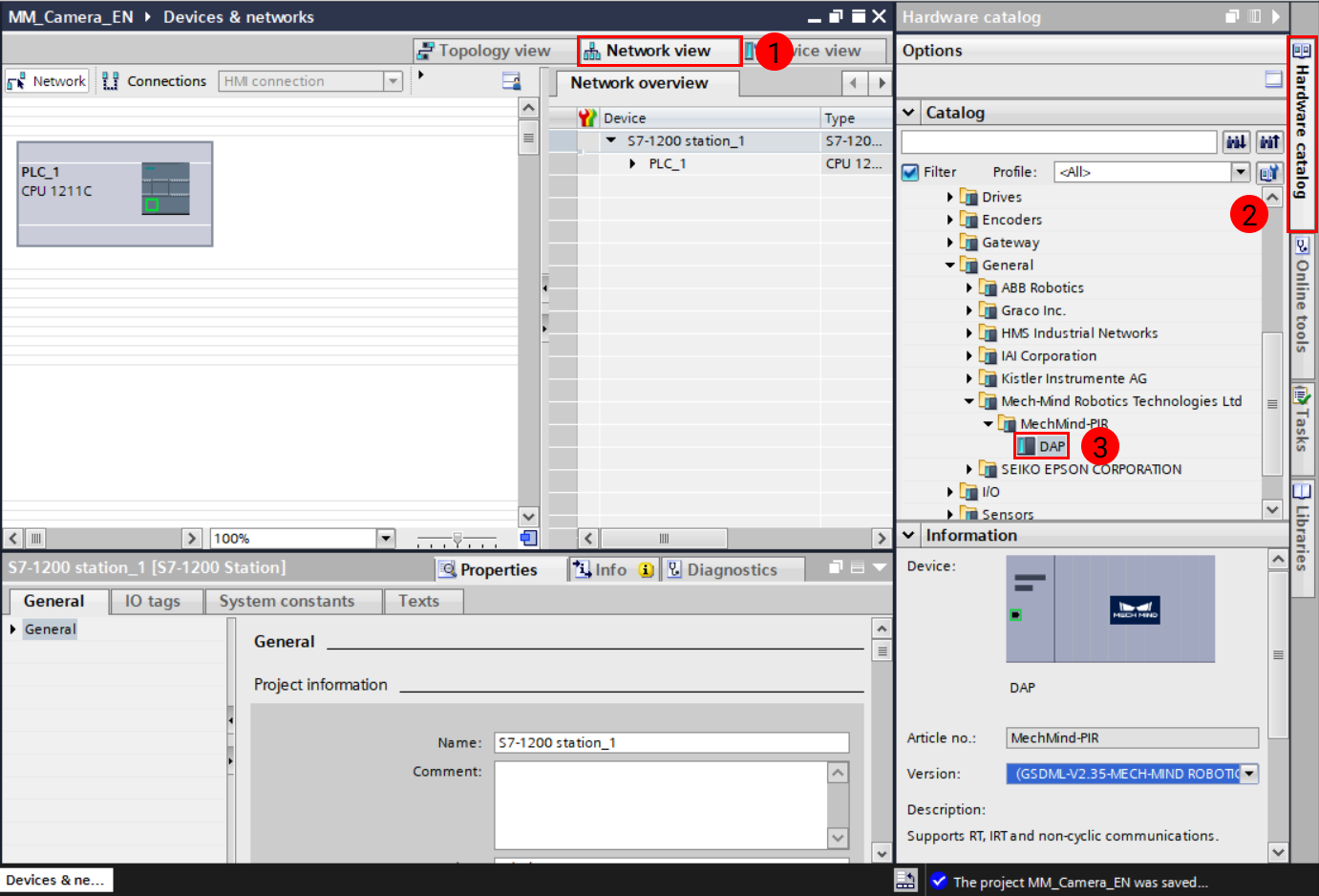
Dans le panneau Arborescence du projet, double-cliquez sur Device configuration pour entrer dans l’interface suivante. Cliquez sur Network view, ouvrez le Catalogue matériel, puis double-cliquez sur DAP sous General/Mech-Mind Robotics Technologies Ltd/MechMind-PIR pour afficher mechmind-pir dans la Vue réseau.
-
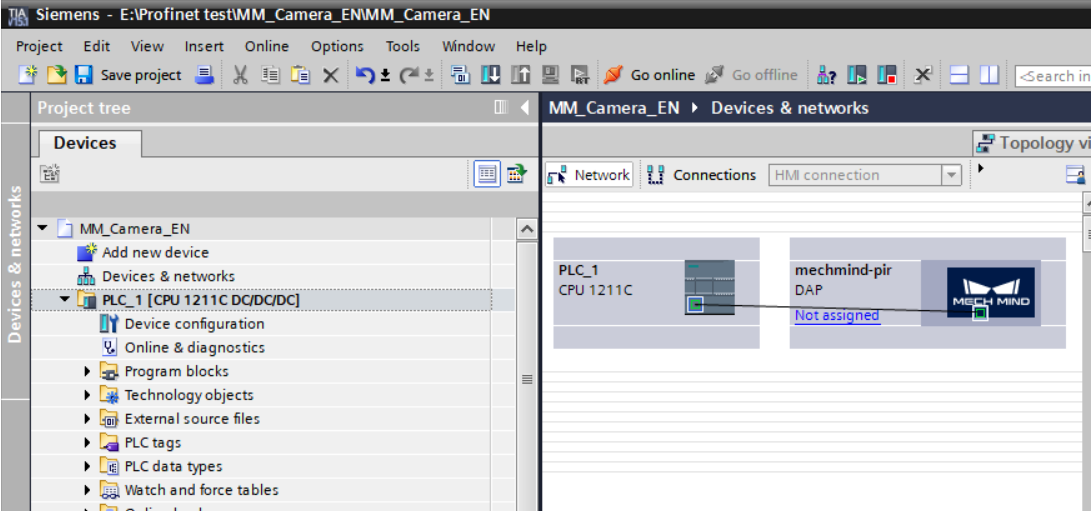
Dans la Vue réseau, cliquez sur l’icône Ethernet de PLC_1 et faites-la glisser vers l’icône Ethernet de mechmind-pir, puis relâchez le bouton lorsqu’une ligne de connexion noire apparaît.
-
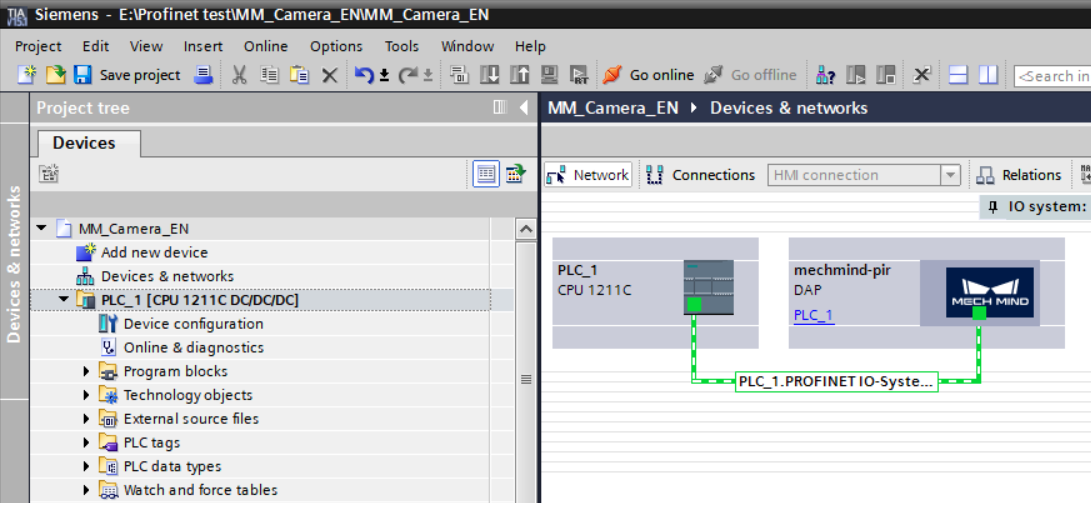
Une connexion réussie devrait ressembler à ceci :
-
Cliquez sur l’icône Ethernet de mechmind-pir. Dans l’onglet Général de l’onglet Propriétés, cliquez sur Adresses Ethernet pour définir l’adresse IP. Assurez-vous que Générer automatiquement le nom de l’appareil PROFINET est coché et conservez les autres paramètres par défaut.
Cette adresse IP doit être sur le même sous-réseau que celle de l’API et ne pas être utilisée par d’autres appareils. 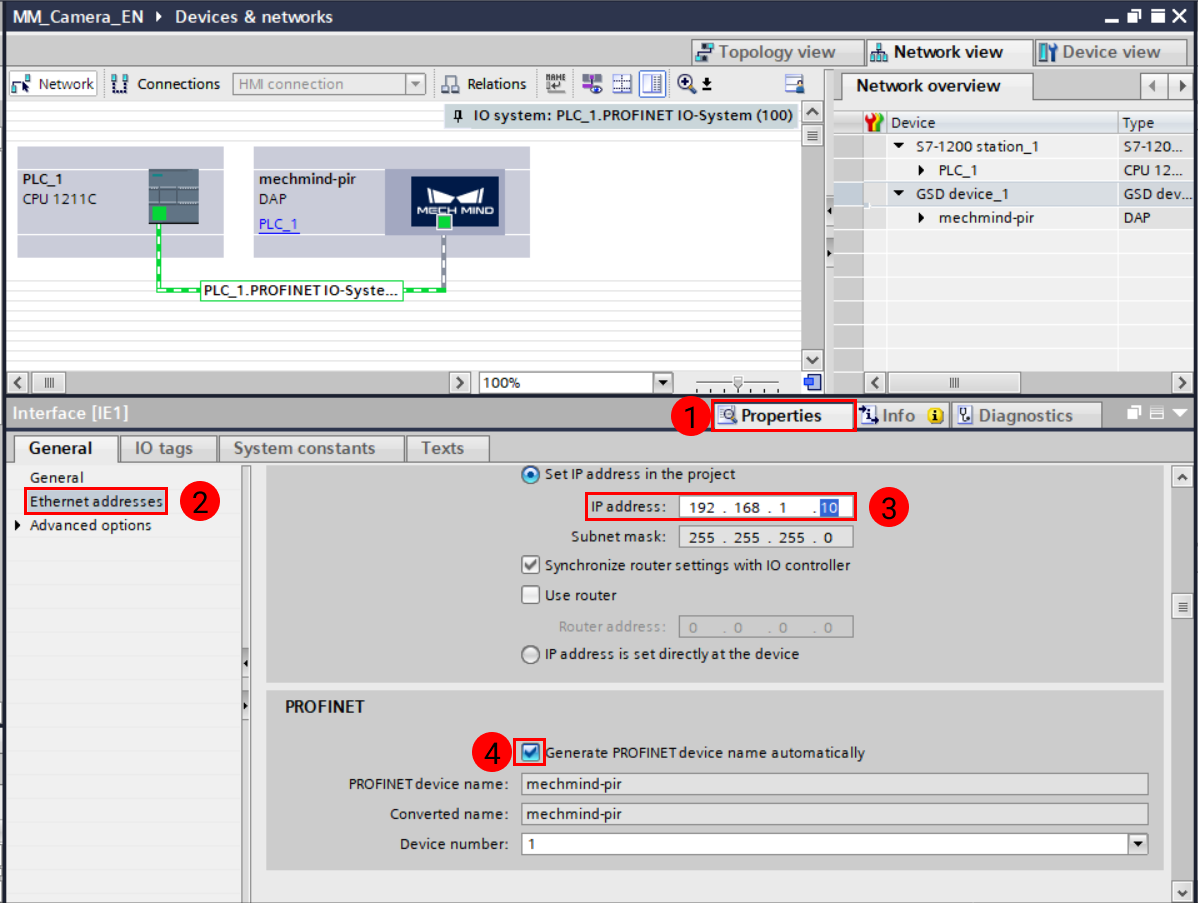
-
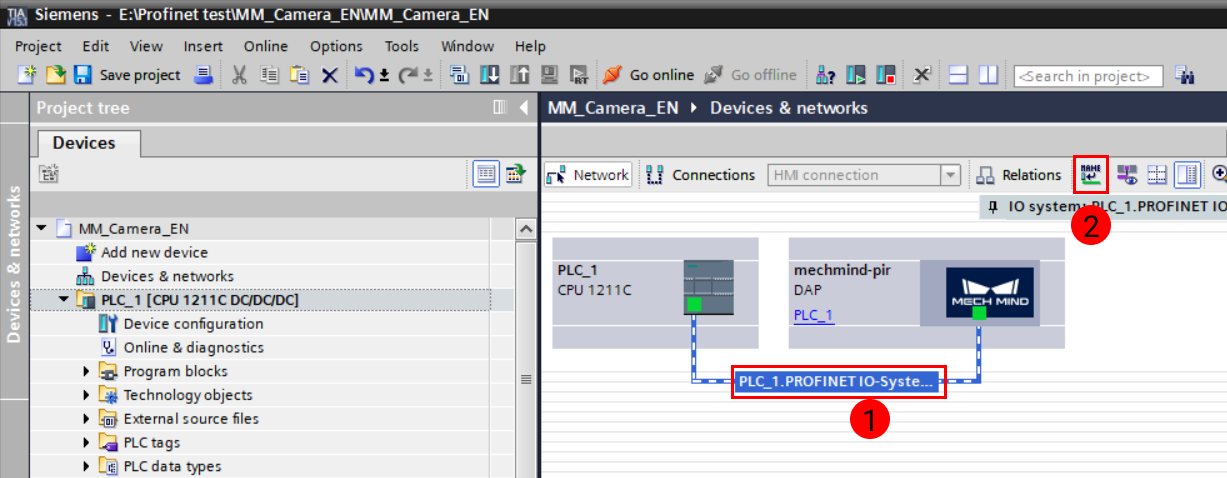
Dans le panneau Réseau, cliquez sur la ligne de connexion verte, puis cliquez sur l’icône assign.
-
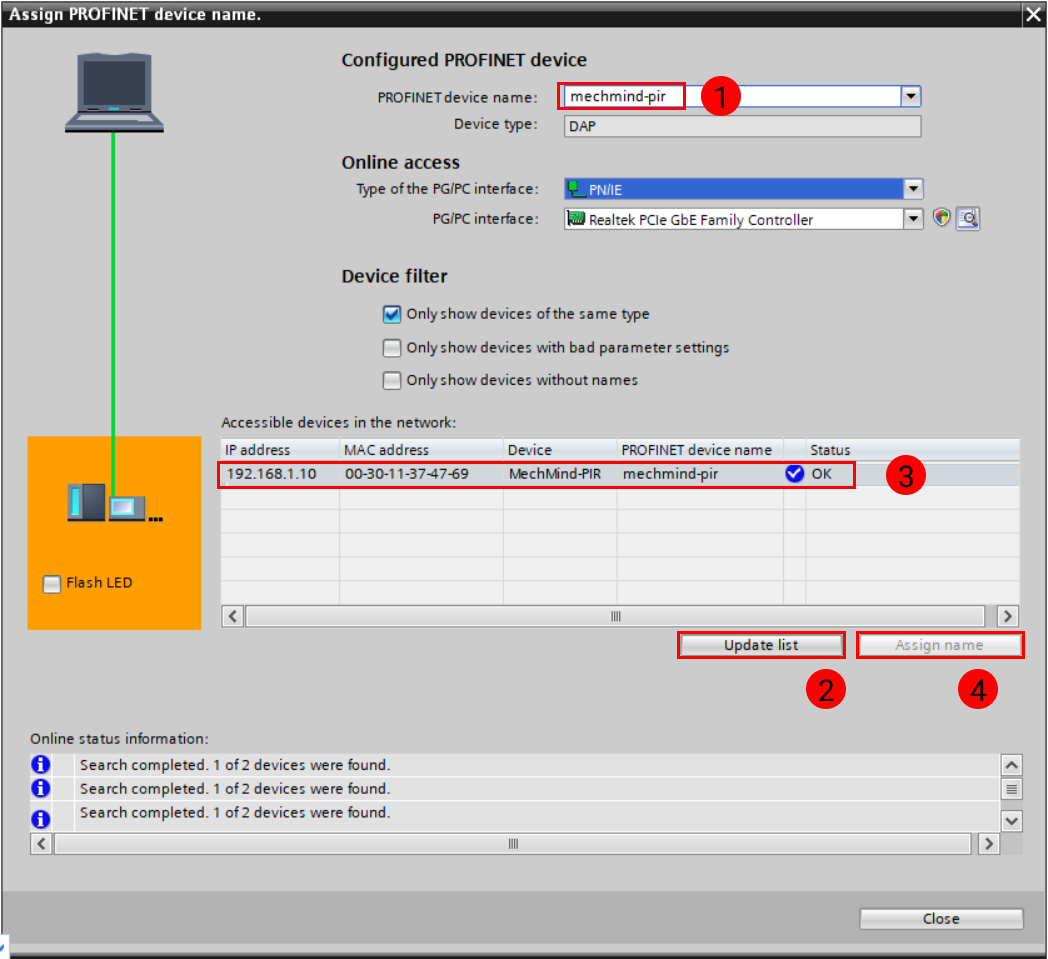
Dans la fenêtre contextuelle, sélectionnez mechmind-pir pour le nom d’appareil PROFINET, puis cliquez sur Update list. Lorsque l’appareil apparaît dans la liste, vérifiez si le nom d’appareil PROFINET est mechmind-pir. Sinon, cliquez sur Assign name. Une fois que le Statut est OK, cliquez sur Close pour fermer la fenêtre.
-
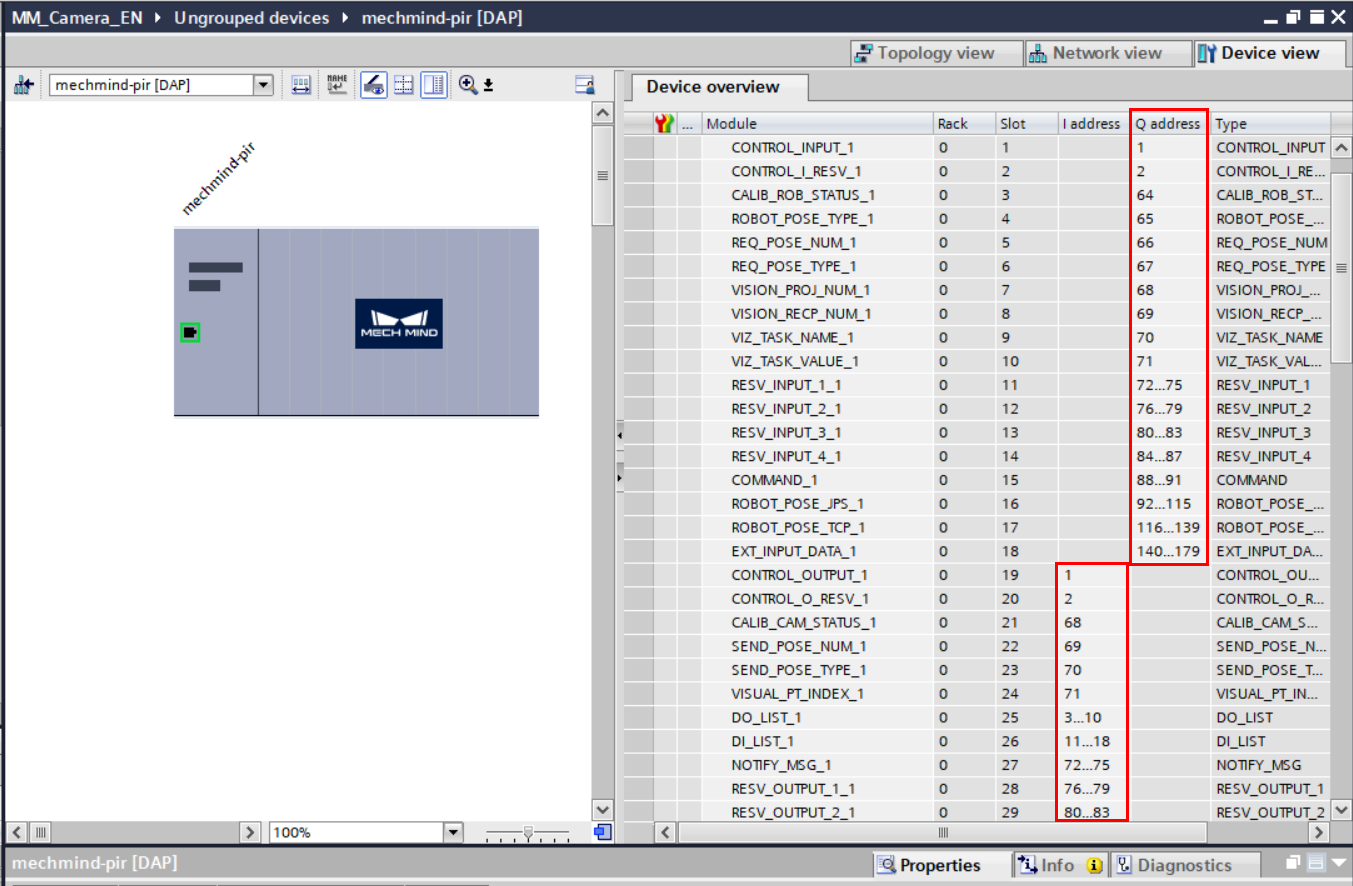
Double-cliquez sur mechmind-pir pour entrer dans la Vue appareil. Vous pouvez voir tous les modules disponibles listés.
Télécharger la configuration matérielle vers l’API
-
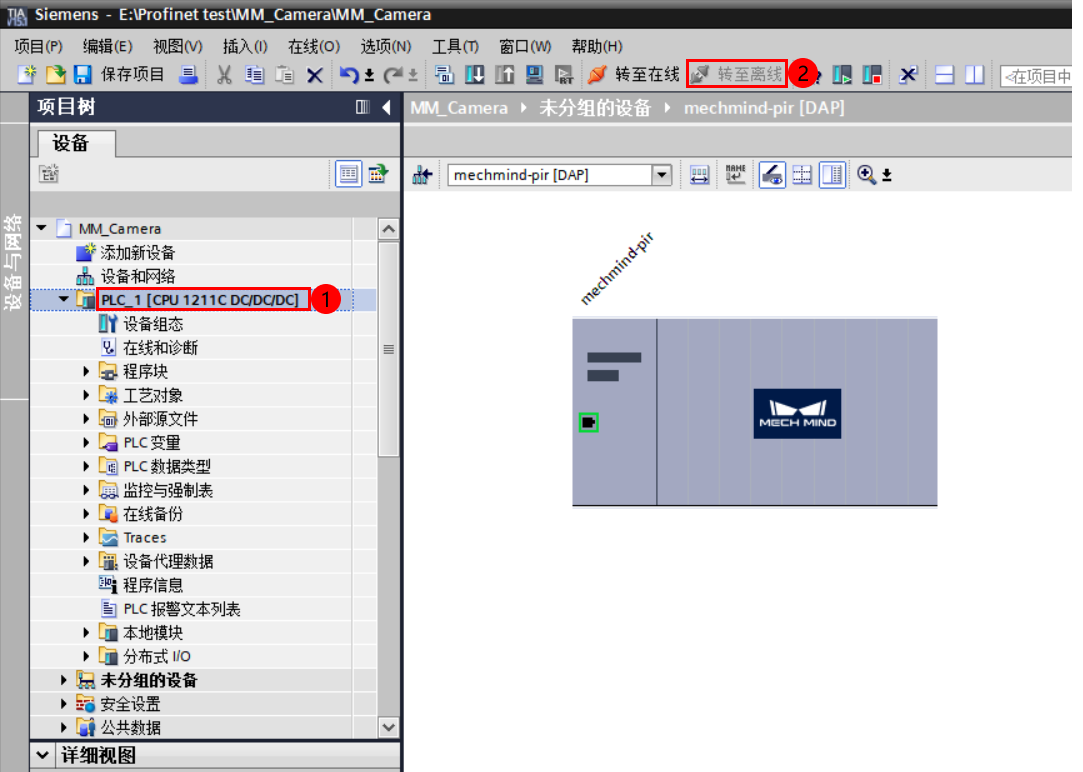
Dans le panneau Arborescence du projet, faites un clic droit sur PLC_1[CPU 1211C DC/DC/DC] et sélectionnez . La fenêtre Extended download to device apparaît.
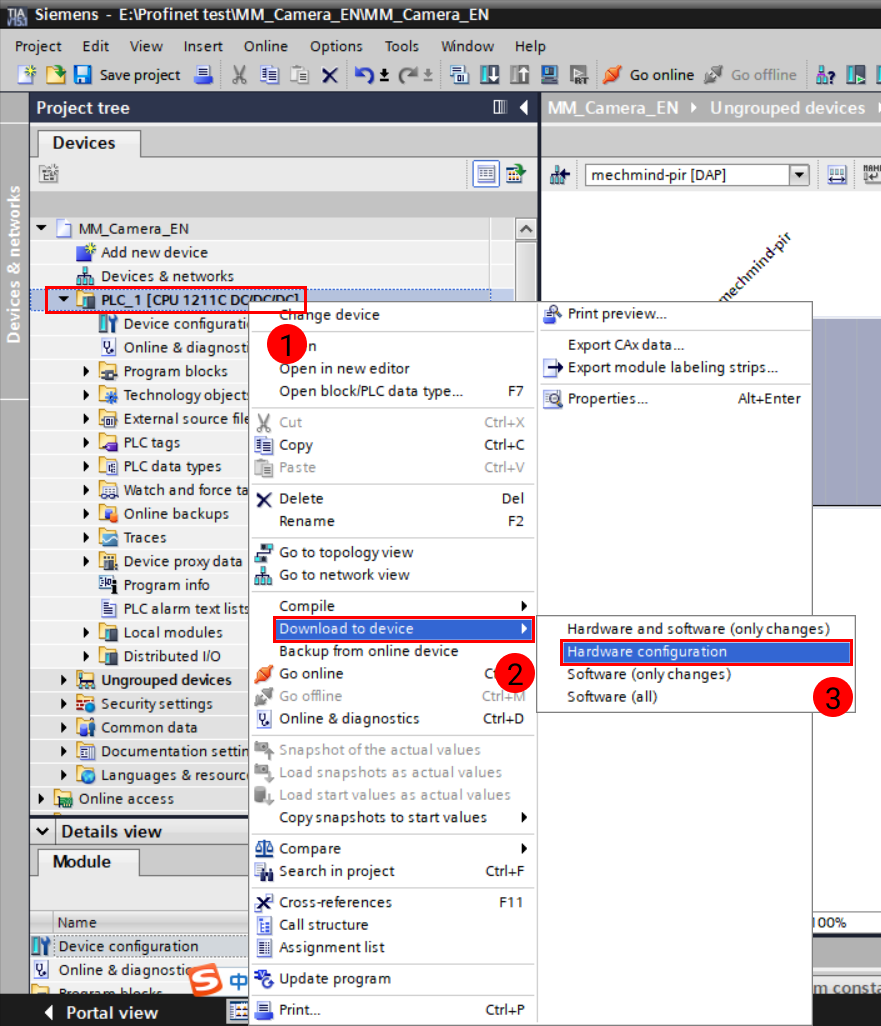
-
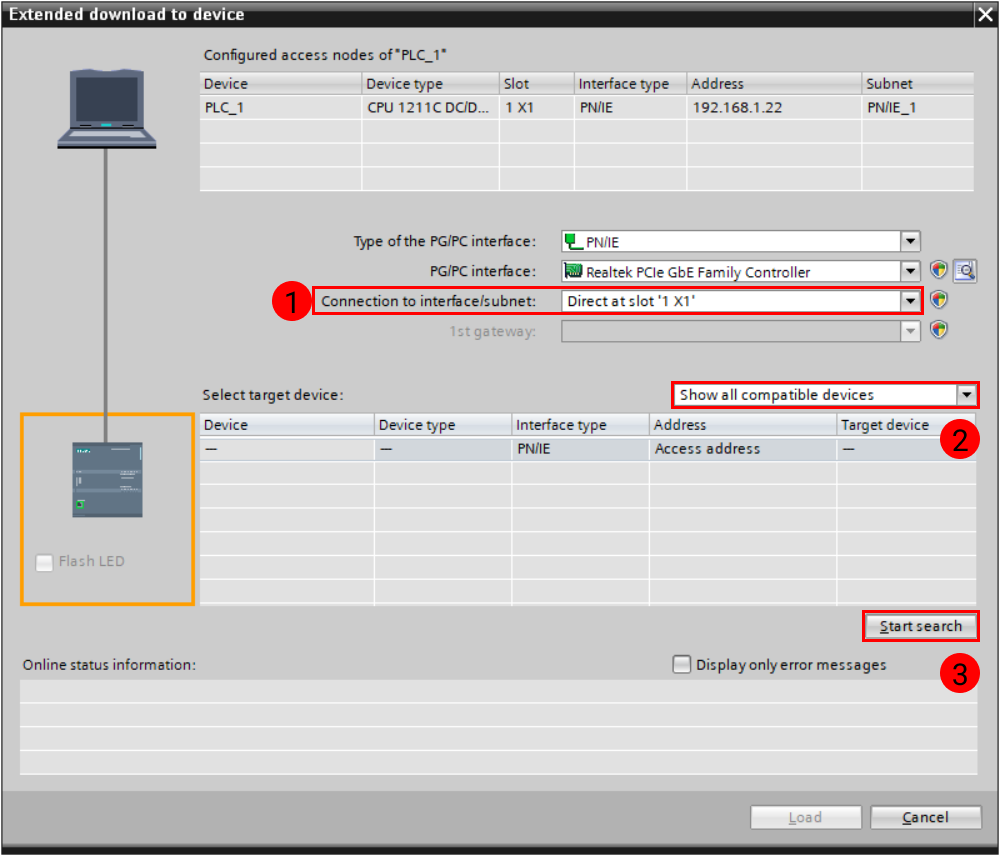
Définissez Connection to interface/subnet sur Direct at slot ‘1×1’, et Select target device sur Show all compatible devices, puis cliquez sur Start search.
-
Sélectionnez l’appareil correspondant dans le résultat de recherche, puis cliquez sur Load. Dans la fenêtre d’aperçu de téléchargement qui apparaît, cliquez sur Load pour télécharger la configuration matérielle du projet vers l’API.
Si le bouton Load est désactivé, suivez les instructions dans l’interface pour résoudre les erreurs correspondantes. Une fois résolues, vous pouvez poursuivre l’opération. 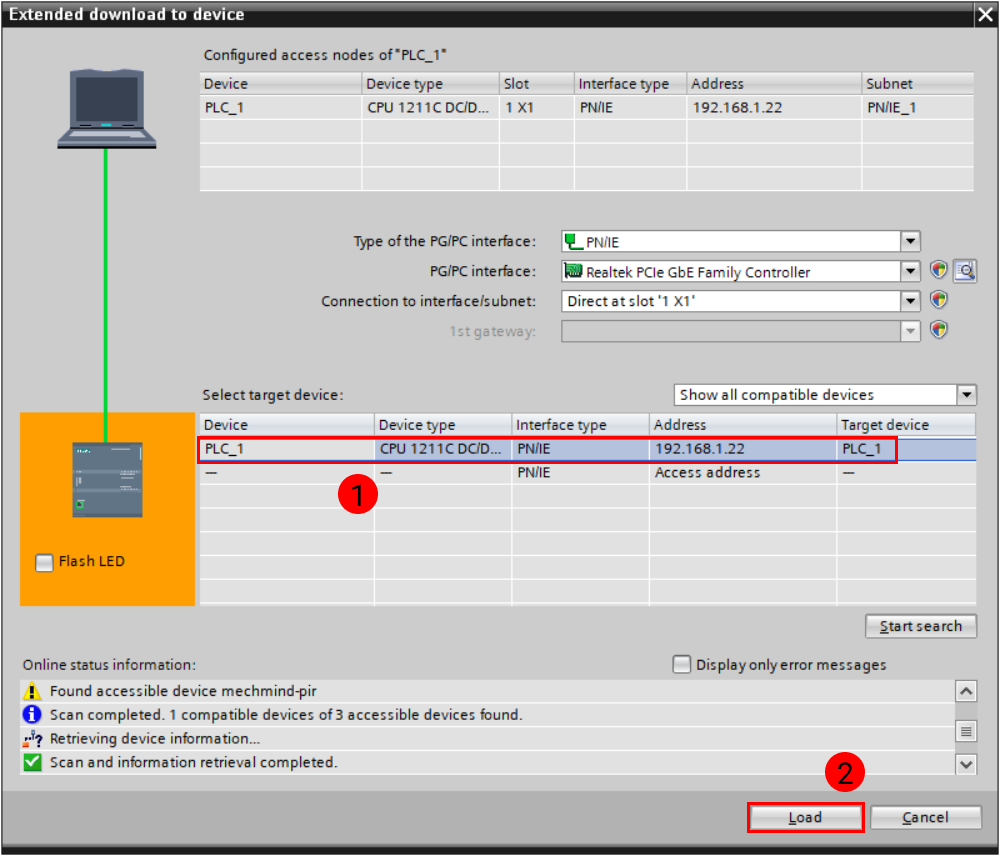
Vérifier la communication
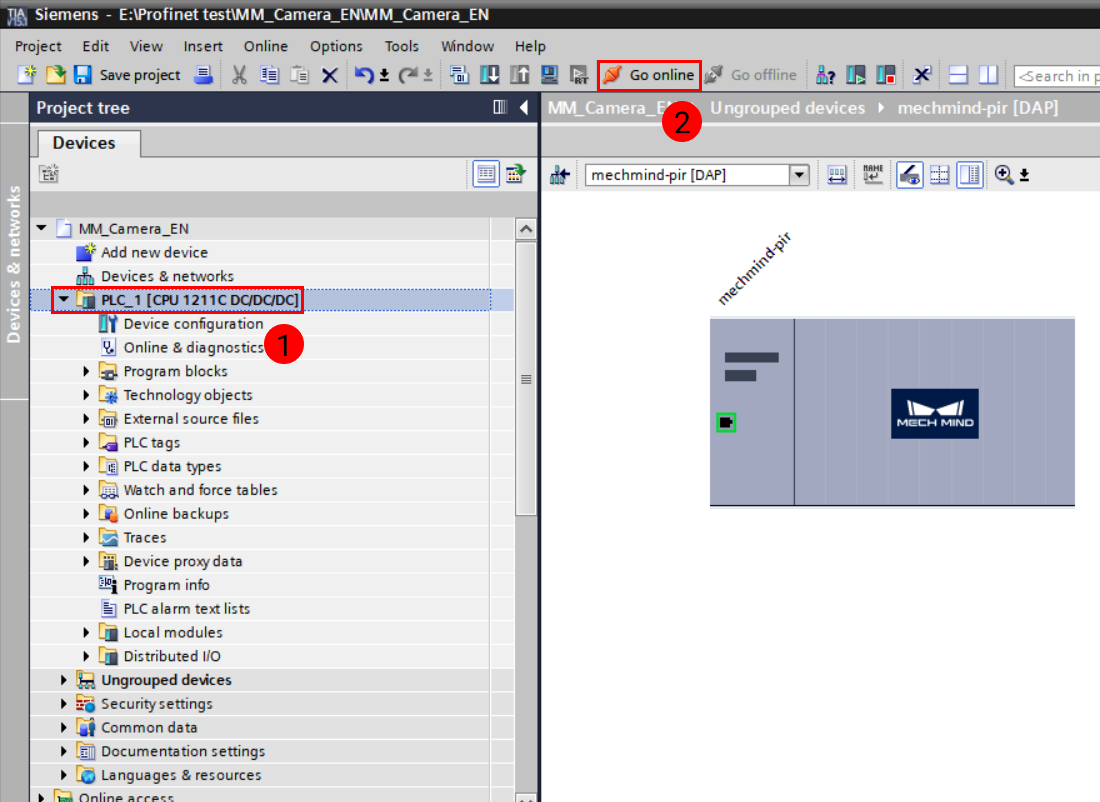
-
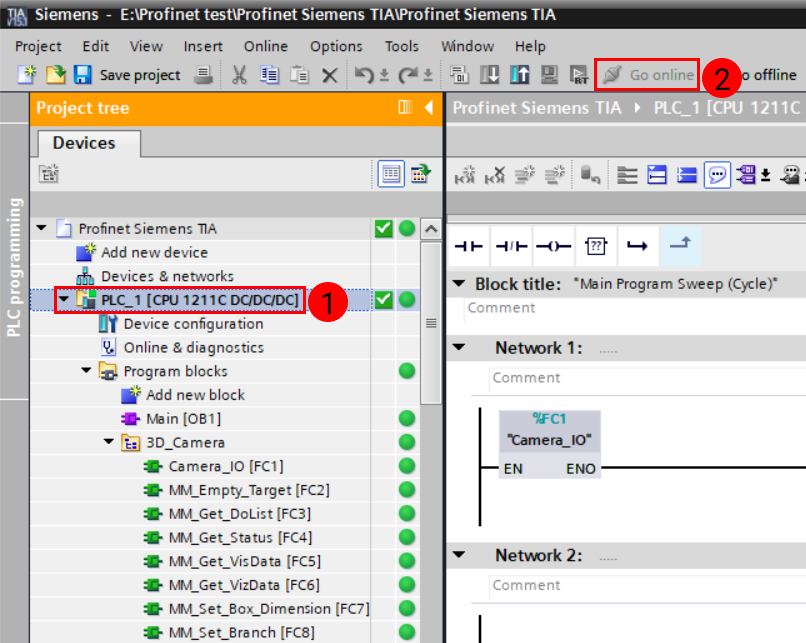
Revenez au projet et cliquez sur PLC_1 dans le panneau Arborescence du projet. Ensuite, cliquez sur Go online dans la barre d’outils.
-
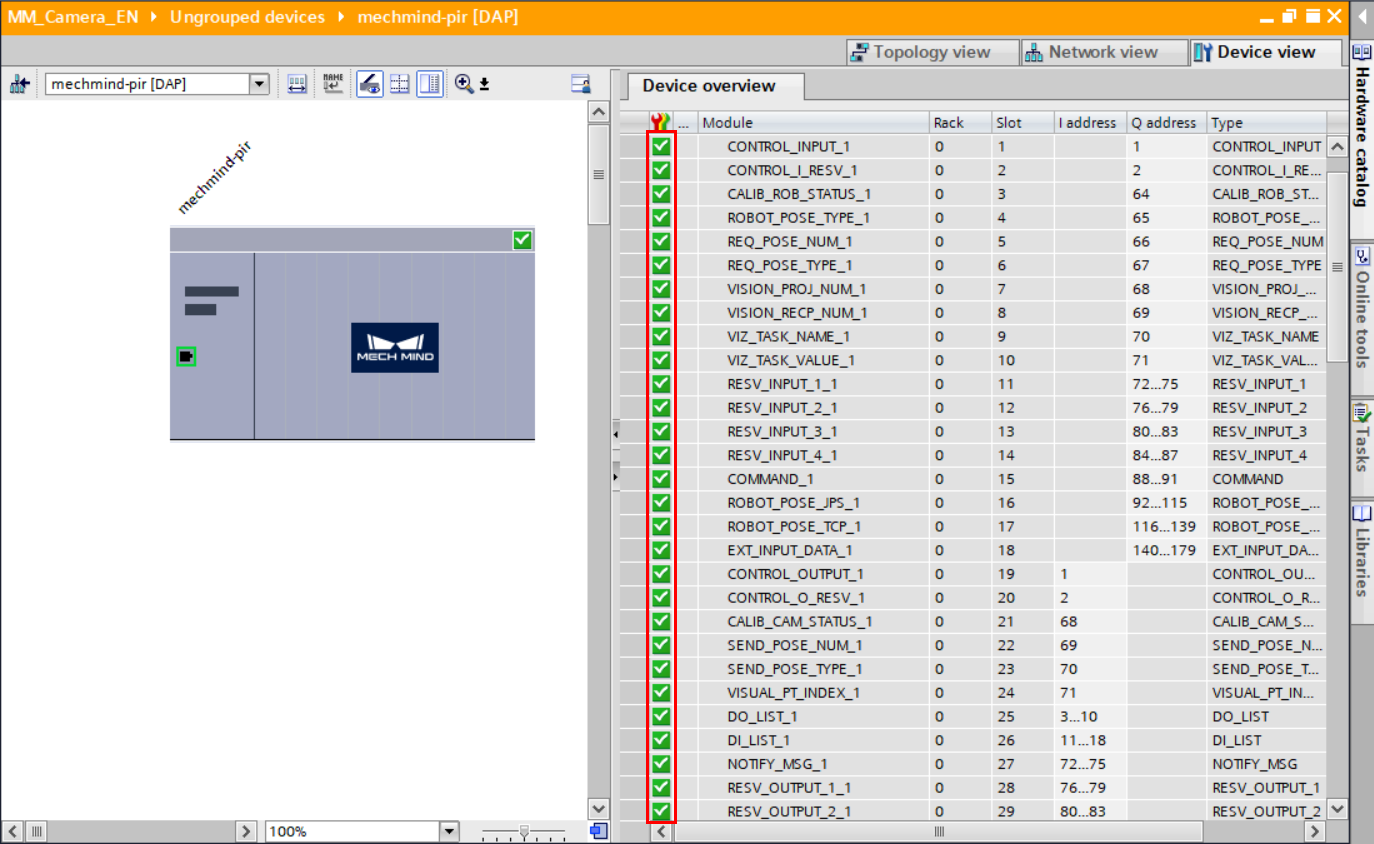
Dans le panneau Arborescence du projet, cliquez sur Device configuration, puis cliquez sur l’onglet Device view à droite. Sélectionnez mechmind-pir. Dans la Vue d’ensemble de l’appareil, des coches sur fond vert devant les noms de modules indiquent une connexion normale.
-
L’API est connectée avec succès si le message suivant s’affiche dans l’onglet Console du panneau Log de Mech-Vision : Connect to PROFINET-IRT controller successfully. Si vous ne voyez pas ce message de log, veuillez vérifier :
-
Si le matériel est correctement connecté ;
-
Si le service d’interface a été activé avec succès dans Mech-Vision ;
-
Si la configuration matérielle a été téléchargée vers l’API.
-
Importer le programme d’exemple et le télécharger vers l’API
| Avant d’ajouter le programme d’exemple Mech-Mind à un projet déjà utilisé, il est recommandé de l’importer dans un nouveau projet et de le tester d’abord. Dans les étapes suivantes, le projet créé précédemment est utilisé pour importer et tester le programme d’exemple. |
Importer les programmes d’exemple Mech-Mind
-
Sélectionnez PLC_1 dans le panneau Arborescence du projet, puis cliquez sur Go offline dans la barre d’outils.
-
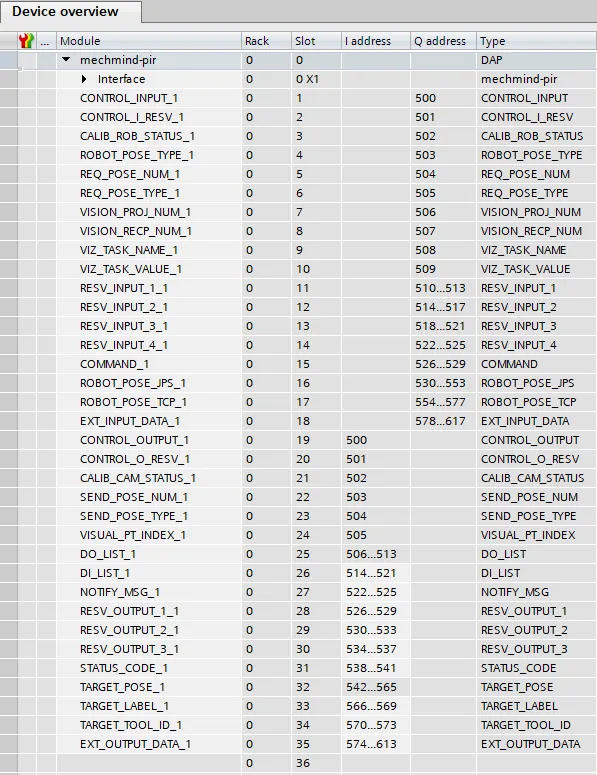
Dans la Vue réseau, double-cliquez sur mechmind-pir pour entrer dans la Vue appareil. Modifiez les adresses I et adresses Q en fonction du besoin réel. Ici, 500 est utilisé comme adresse de départ la plus basse du module.
-
Pour un module occupant plusieurs octets, les adresses attribuées doivent être continues et l’adresse de départ du module doit être un nombre pair.
-
Assurez-vous que les adresses I/Q n’entrent pas en conflit avec d’autres adresses dans l’API.
-
-
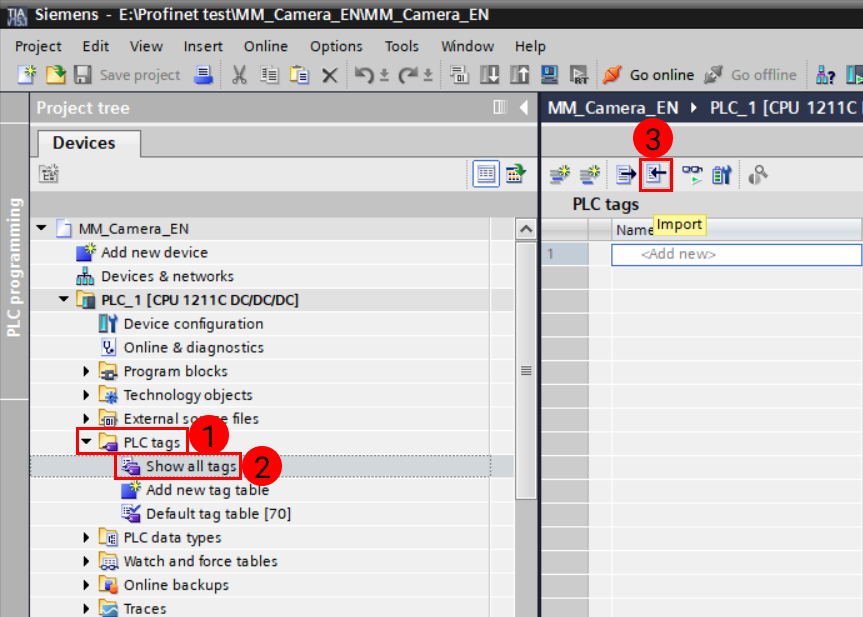
Dans le panneau Arborescence du projet, double-cliquez sur pour ouvrir la fenêtre PLC tags. Ensuite, cliquez sur l’icône import pour ouvrir la fenêtre Import.
-
Dans la fenêtre contextuelle, cliquez sur … à droite du champ de saisie et localisez le fichier
PLCTags.xlsx. Cliquez sur OK pour importer la table d’étiquettes CameraIO.Le fichier PLCTags.xlsxest stocké dansCommunication Component/Robot_Interface/PROFINET/Programming Samples/Siemens TIA Portal S7-1200 PLC PROFINETdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez le fichier depuis l’IPC vers l’ordinateur sur lequel TIA Portal est installé à l’avance.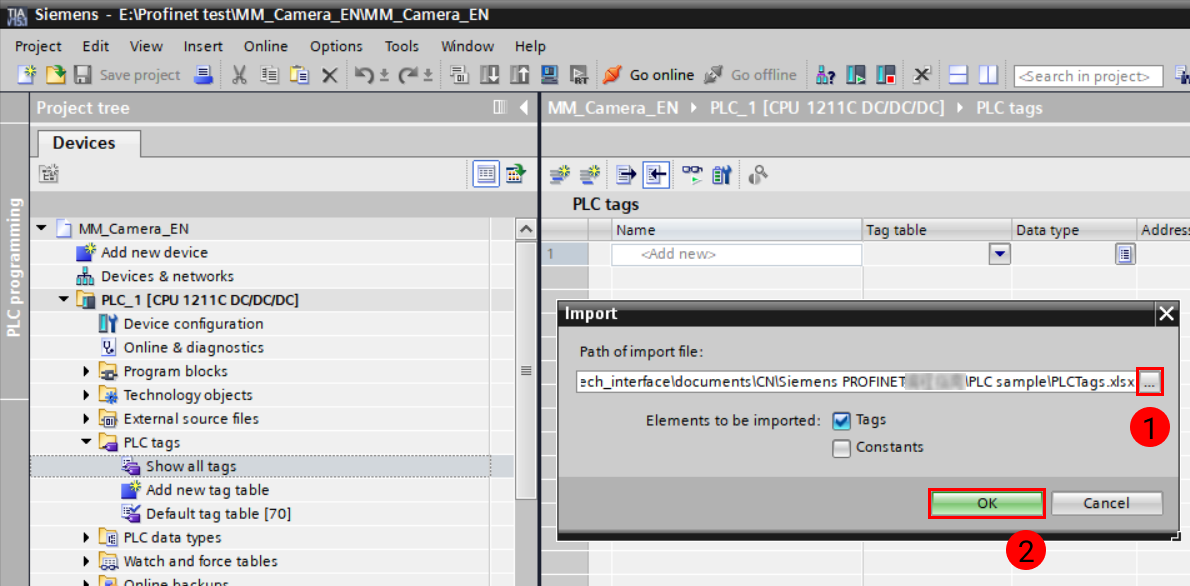
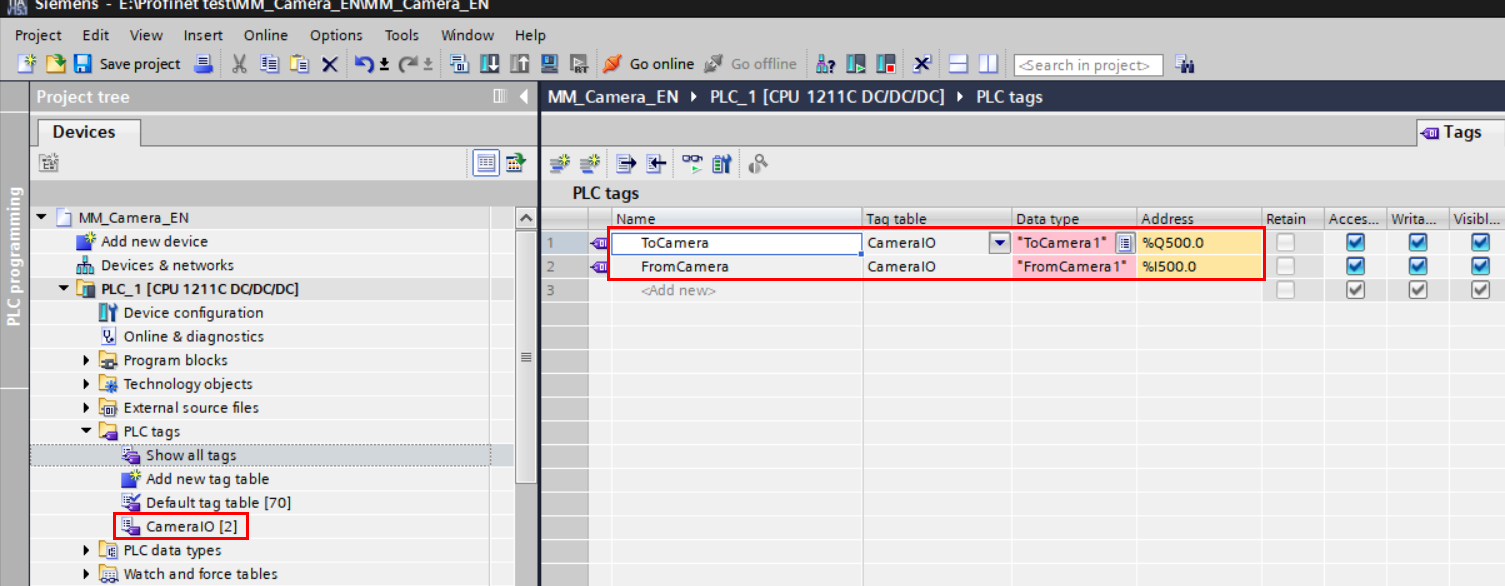
La fenêtre doit ressembler à la figure ci-dessous si les étiquettes sont importées avec succès.
-
Dans le panneau Arborescence du projet, double-cliquez sur External source files, puis double-cliquez sur Add new external file. Dans la fenêtre contextuelle, localisez et sélectionnez les fichiers
Camera_IO.scletMM Profinet Interface Program.scl. Cliquez sur Open pour importer ces fichiers.Les fichiers Camera_IO.scletMM Profinet Interface Program.sclsont stockés dansCommunication Component/Robot_Interface/PROFINET/Programming Samples/Siemens TIA Portal S7-1200 PLC PROFINETdans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez ces deux fichiers depuis l’IPC vers l’ordinateur sur lequel TIA Portal est installé à l’avance.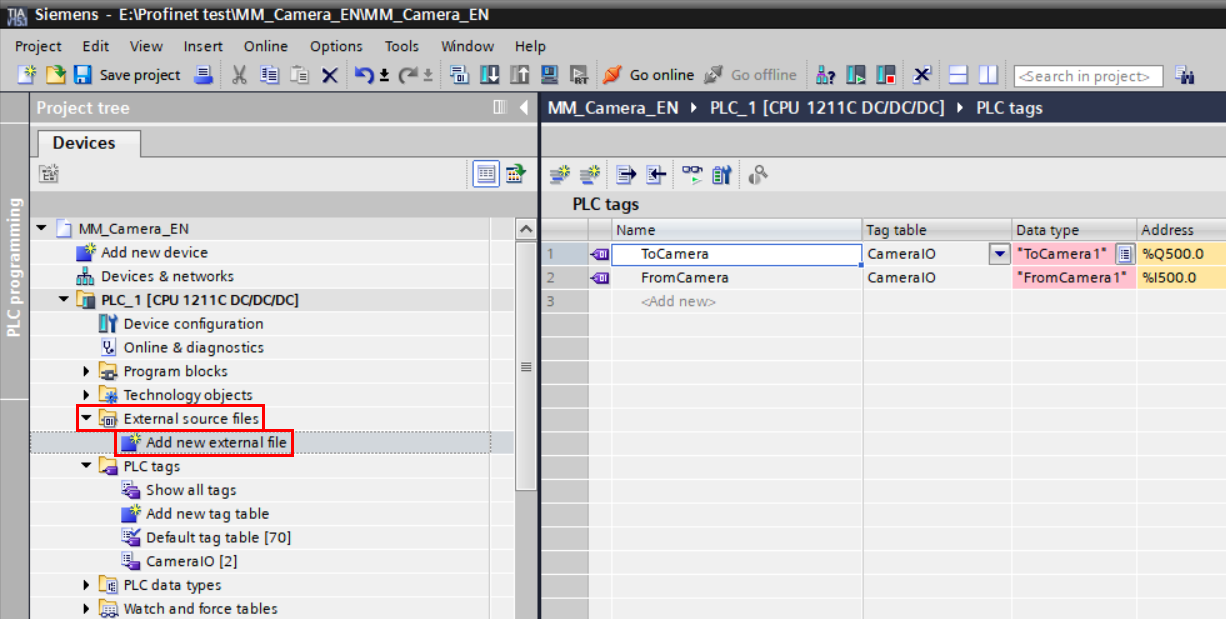
-
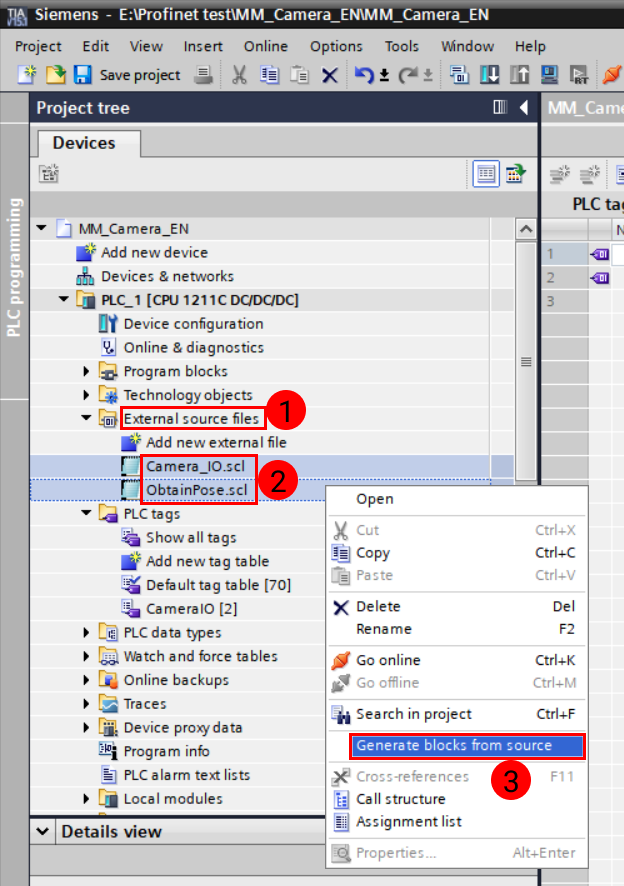
Sélectionnez les deux fichiers sources externes importés puis faites un clic droit sur ces fichiers. Dans le menu contextuel, sélectionnez Generate blocks from source.
-
Un message indiquant que « blocks can be overwritten » apparaîtra. Sélectionnez OK dans la fenêtre contextuelle.
-
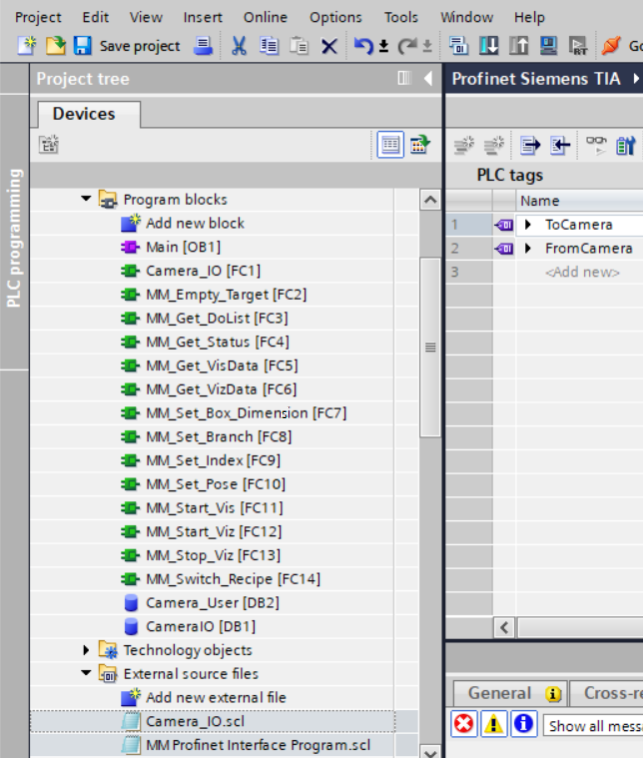
Les fonctions et blocs de données générés à partir des fichiers sources externes sont illustrés ci-dessous. Camera_User[DB2] stocke les données utilisateur. L’adresse de variable de CameraIO [2] dans la table des variables doit être cohérente avec l’adresse de départ modifiée dans la configuration de l’appareil.
-
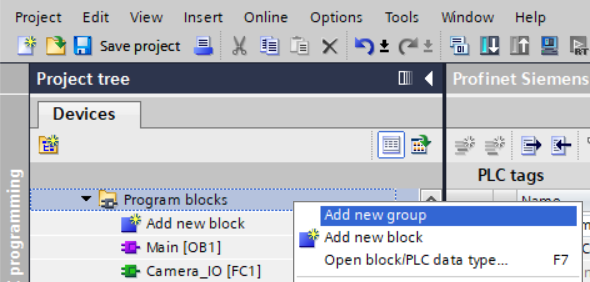
Dans le projet, pour faciliter la maintenance des fonctions et des blocs de données, sélectionnez Program blocks, faites un clic droit et sélectionnez Add new group, puis nommez-le 3D_Camera.
-
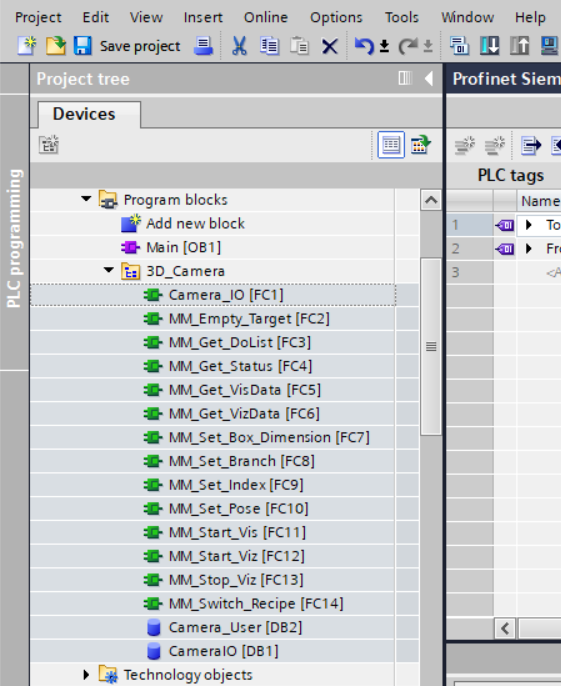
Sélectionnez toutes les fonctions et tous les blocs de données nouvellement générés, puis déplacez-les dans le groupe 3D_Camera.
Compiler le programme et le télécharger vers l’API
-
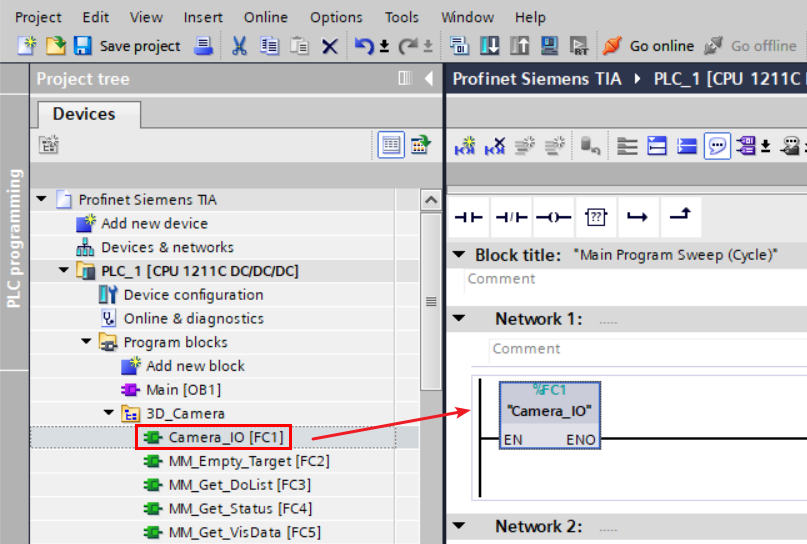
Dans le panneau Arborescence du projet, double-cliquez sur Main[OB1] dans Program blocks pour l’ouvrir. Ensuite, sélectionnez Camera_IO et faites-le glisser vers Network 1.
-
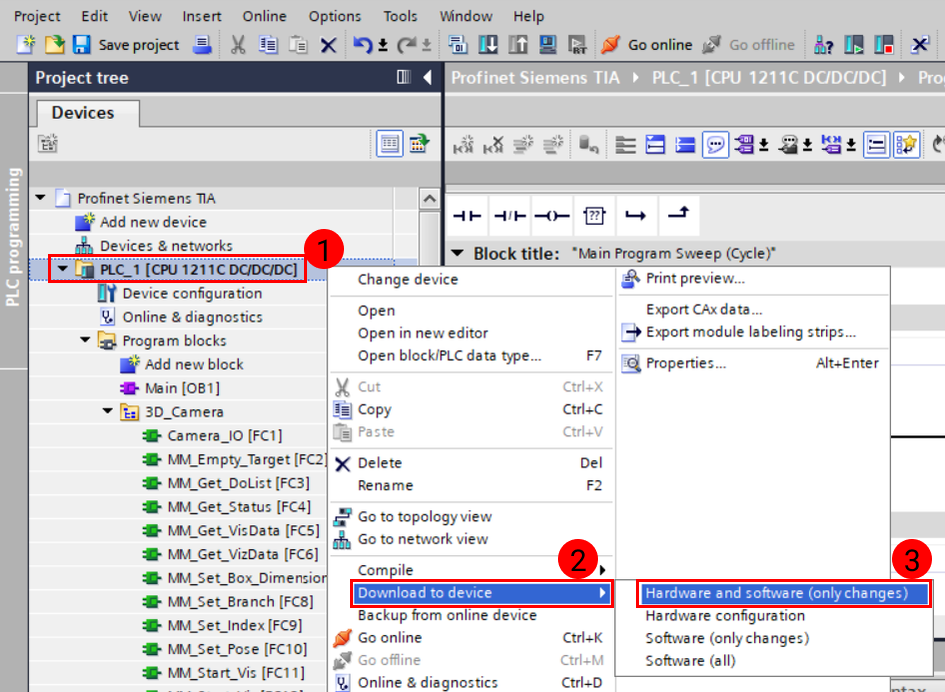
Dans le panneau Arborescence du projet, faites un clic droit sur PLC_1[CPU 1211C DC/DC/DC] et sélectionnez . La fenêtre Extended download to device apparaît. Dans la fenêtre contextuelle, sélectionnez Show all compatible devices pour Select target device, puis cliquez sur Start search pour télécharger le programme vers l’API. Sélectionnez l’appareil correspondant dans le résultat de recherche et cliquez sur Load.
-
Une fois le programme téléchargé avec succès, sélectionnez PLC_1[CPU 1211C DC/DC/DC] dans le panneau Arborescence du projet, puis cliquez sur Go online.
-
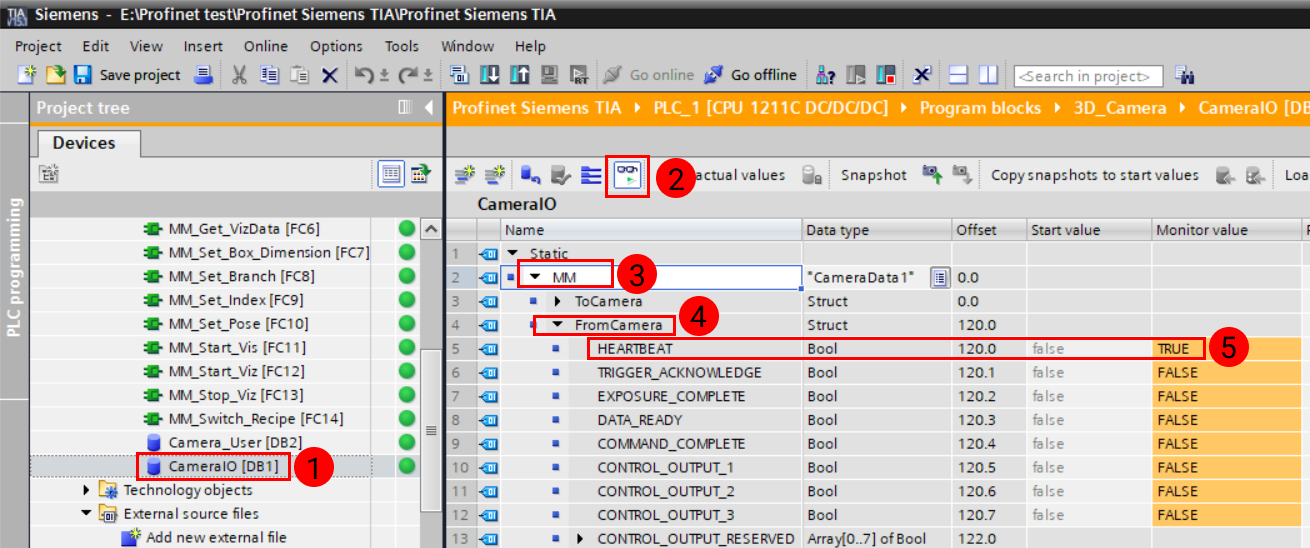
Dans le panneau Arborescence du projet, double-cliquez sur Program blocks ‣ CameraIO[DB1] puis cliquez sur l’icône monitor. Double-cliquez pour développer FromCamera. Si la valeur de surveillance de HEARTBEAT change en continu, alors les adresses I/Q des modules dans mechmind-pir ont bien été transférées vers le FB CameraIO.
Test avec des projets de vision
Cette section présente comment utiliser le bloc de fonctions du programme d’exemple pour déclencher le projet Mech-Vision afin d’obtenir des points de vision et déclencher le projet Mech-Viz afin d’obtenir le chemin planifié. Pour plus d’informations sur les modules IO, veuillez vous référer à Communications PROFINET entre un API Siemens SIMATIC S7 Series et le système Mech-Mind.
Prérequis
-
Revenez à Mech-Vision et créez un projet Mech-Vision. Faites un clic droit sur la solution et sélectionnez Autoload Solution. Les projets de la solution sont également chargés automatiquement. En même temps, le numéro du projet s’affiche devant chaque nom de projet.
-
Créez un projet Mech-Viz. Faites un clic droit sur le nom du projet dans Resources de Mech-Viz et sélectionnez Autoload Project.
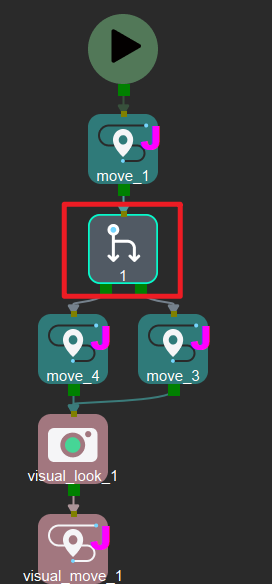
Le projet Mech-Viz utilisé pour les tests doit contenir une étape “Branch by Msg” qui a été renommée en 1, comme illustré ci-dessous.
Exécuter le projet Mech-Vision et obtenir des points de vision
Configurer les programmes
-
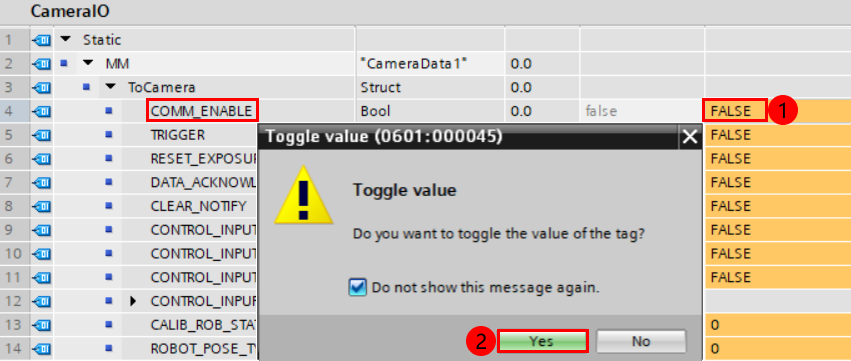
Établir la communication : dans le DB CameraIO, double-cliquez sur la valeur de surveillance de COMM_ENABLE dans ToCamera. Si un message d’avertissement apparaît, cliquez sur Yes pour confirmer la modification de la valeur de surveillance.
-
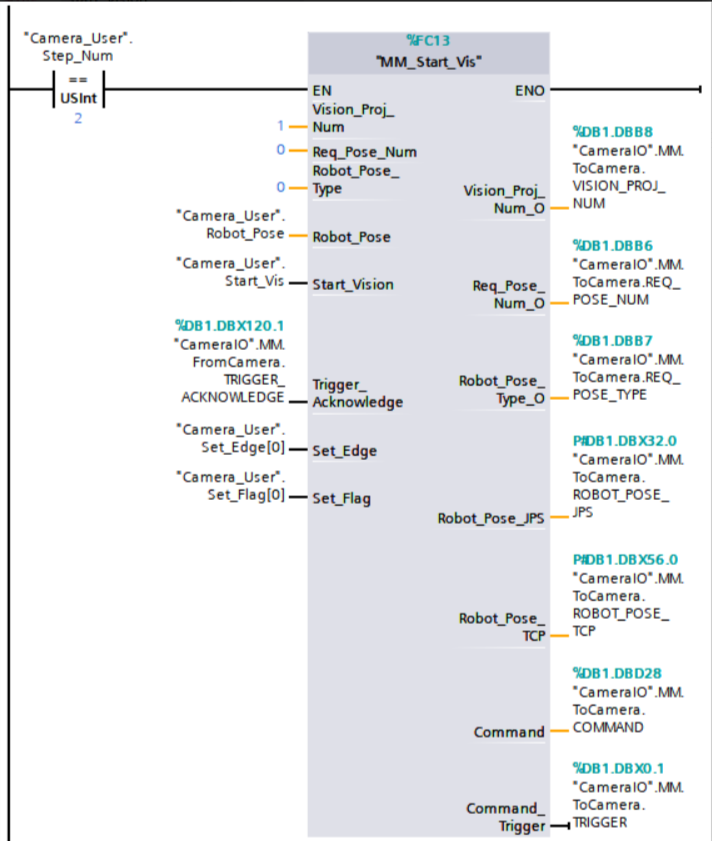
Dans le panneau Arborescence du projet, accédez à Program blocks et double-cliquez sur Main (OB1) pour ouvrir le programme principal. Ensuite, faites glisser MM_Start_Vis vers Network 2 du programme principal et connectez MM_Start_Vis après "Camera_User".Step_Num==2.
Assurez-vous que l’instruction de comparaison dans la fenêtre d’instruction est glissée manuellement et que "Camera_User".Step_Num==2 est défini. 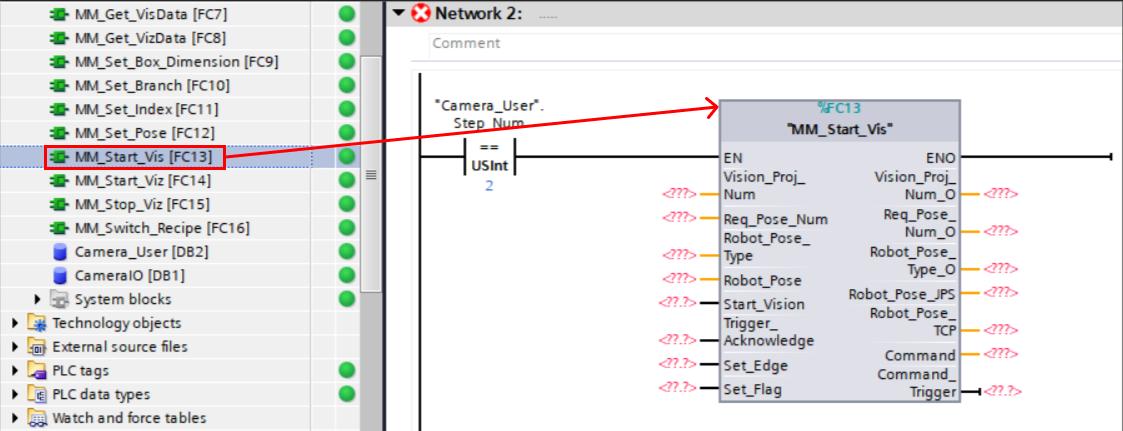
-
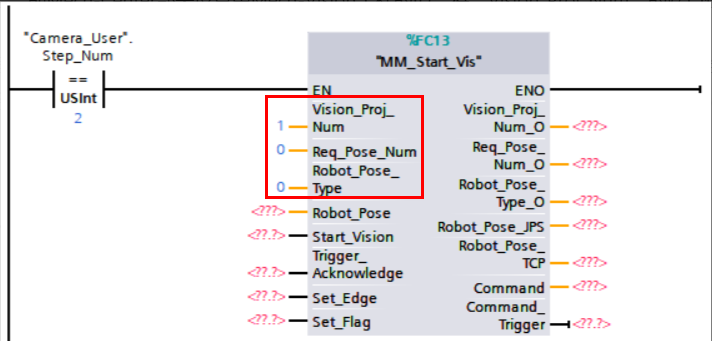
Définissez l’ID du projet Mech-Vision selon le numéro affiché dans le panneau Project List de Mech-Vision. Par exemple, si la valeur est changée à 1, alors le projet n° 1 dans Mech-Vision sera démarré.
-
Définissez le nombre de poses renvoyées par le projet Mech-Vision : définissez la valeur du port Req_Pose_Num sur 0, indiquant que Mech-Vision renvoie tous les résultats de pose.
-
Définissez le type de pose envoyée par le robot. Définissez la valeur du port Robot_Pose_Type sur 0, indiquant que le projet est en mode Eye-to-Hand et qu’il n’est pas nécessaire d’envoyer la pose de prise d’image. Si le projet est en mode Eye-in-Hand, veuillez définir la valeur du port Robot_Pose_Type sur 1 et définir la pose actuelle de la bride du robot sur le port Robot_Pose.
-
Dans le panneau Arborescence du projet, accédez à Program blocks, cliquez sur les DB Camera_User et CameraIO dans l’ordre. Depuis le panneau Vue détaillée, faites glisser les paramètres vers les ports d’entrée correspondants du FC MM_Start_Vis.
-
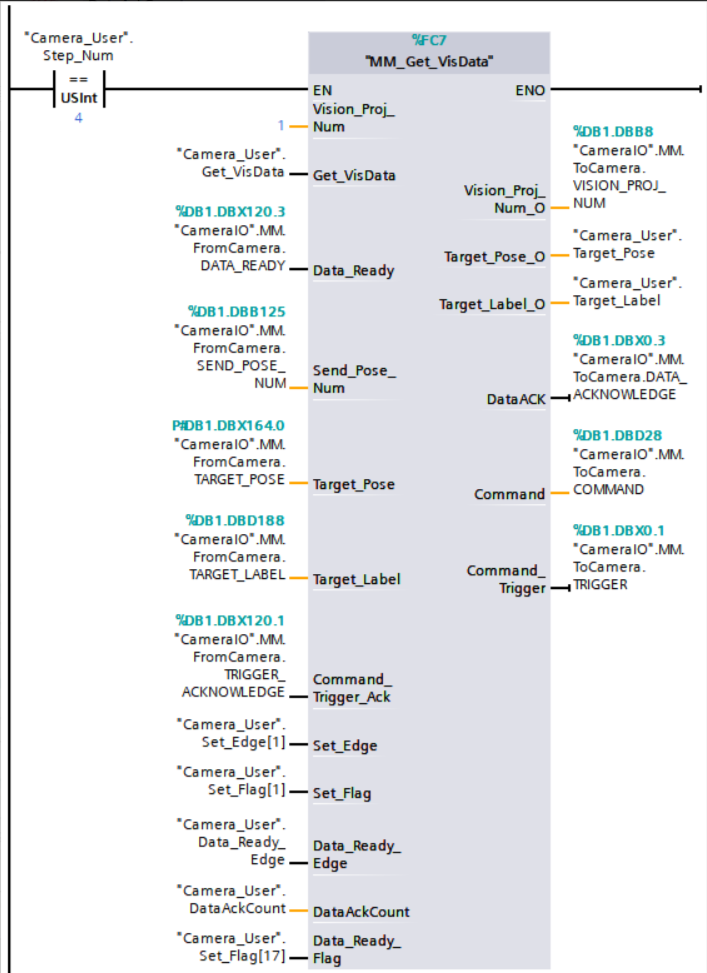
Faites glisser MM_Get_VisData vers Network 3 du programme principal et connectez MM_Get_VisData après "Camera_User".Step_Num==4.
Assurez-vous que l’instruction de comparaison dans la fenêtre d’instruction est glissée manuellement et que "Camera_User".Step_Num==4 est défini. 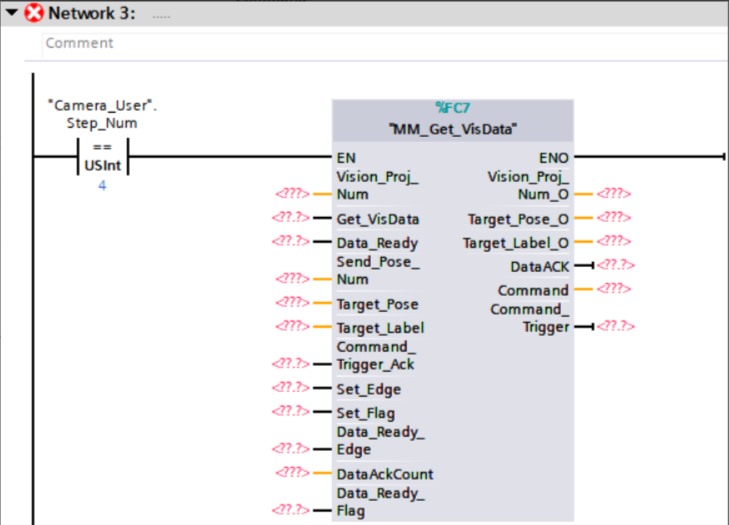
-
Définissez l’ID du projet Mech-Vision selon le numéro affiché dans le panneau Project List de Mech-Vision. Définissez la valeur du port Vision_Proj_Num sur 1, et le résultat de reconnaissance de vision du projet n° 1 dans Mech-Vision sera obtenu.
-
Dans le panneau Arborescence du projet, accédez à Program blocks et cliquez sur les DB Camera_User et CameraIO. Depuis le panneau Vue détaillée, faites glisser les paramètres vers les ports correspondants de MM_Get_VisData.
-
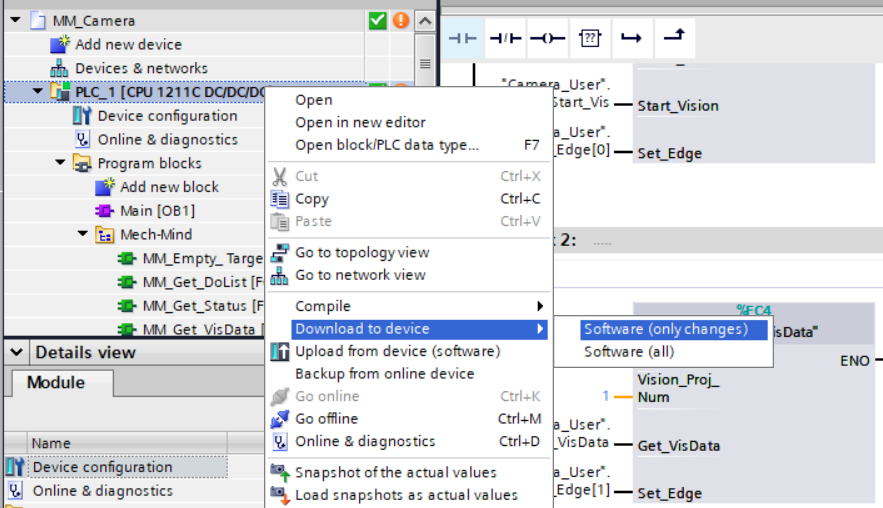
Dans le panneau Arborescence du projet, faites un clic droit sur PLC_1 et sélectionnez Download to device ‣ Software (only changes).
-
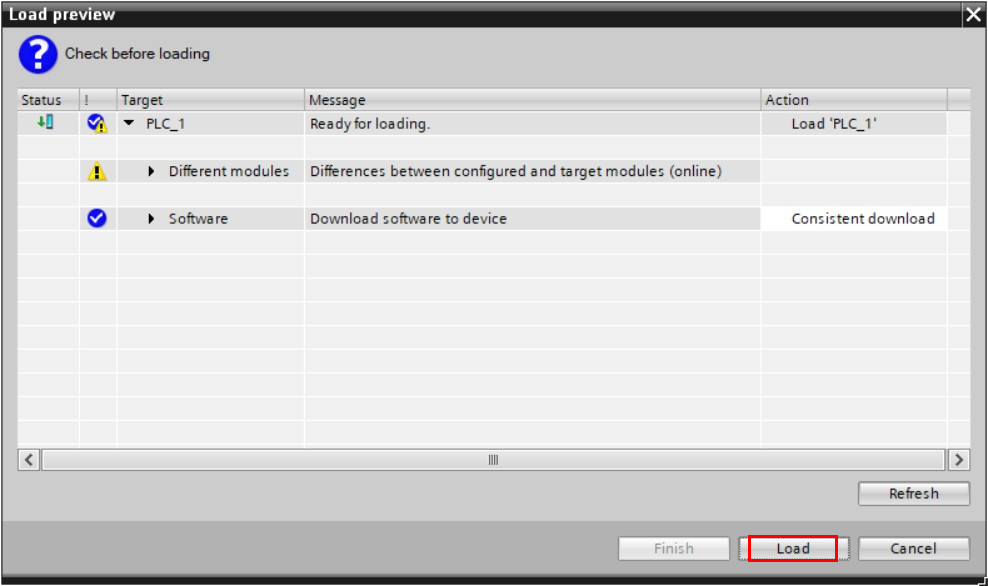
Dans la fenêtre contextuelle Load preview, cliquez sur Load pour télécharger les modifications vers l’API.
Déclencher l’exécution du projet Mech-Vision
-
Dans la fenêtre Main OB, cliquez sur l’icône Monitoring on/off.

-
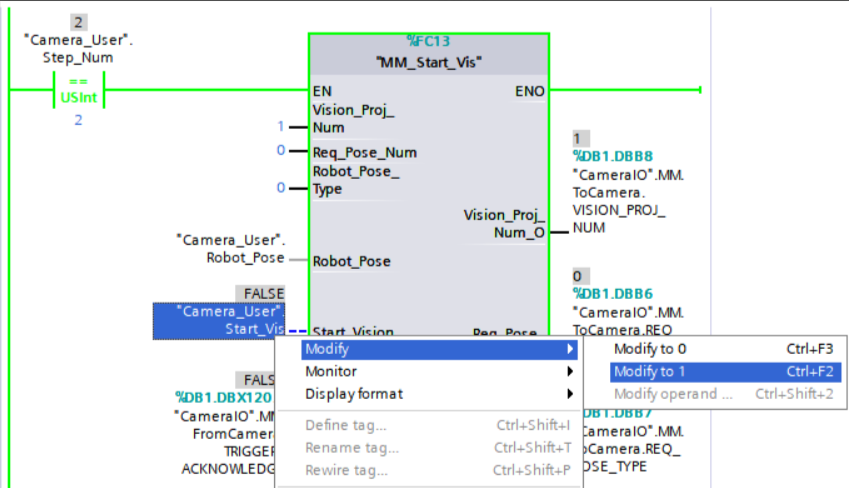
Activez MM_Start_Vis (en définissant "Camera_User".Step_Num == 2), faites un clic droit sur la variable côté entrée "Camera_User".Start_Vis de MM_Start_Vis, puis sélectionnez pour déclencher l’exécution du projet Mech-Vision. Ensuite, réinitialisez cette variable.
-
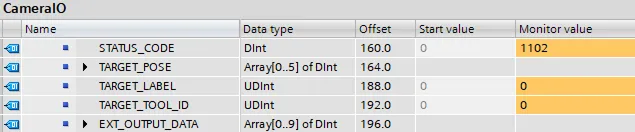
Vérifiez la valeur de retour de la variable STATUS_CODE dans le bloc de données CameraIO. 1102 signifie que le projet a démarré avec succès. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
Obtenir des points de vision depuis Mech-Vision
-
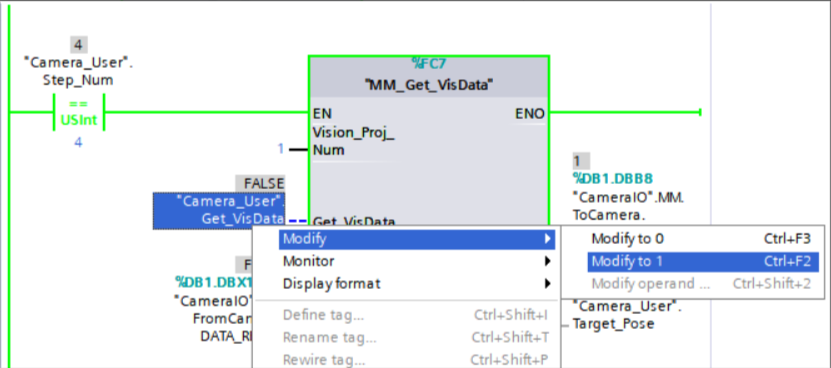
Activez MM_Get_VisData (en définissant "Camera_User".Step_Num==4), faites un clic droit sur la variable côté entrée “Camera_User”.Get_VisData de MM_Get_VisData, puis sélectionnez pour obtenir la position de vision. Ensuite, réinitialisez cette variable.
-
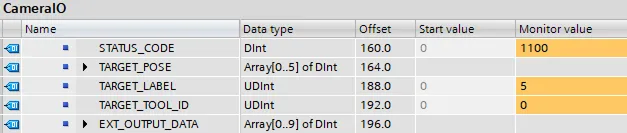
Double-cliquez sur MM Modbus TCP Interface DB pour l’ouvrir et vérifiez la valeur de surveillance de Status Code. 1100 signifie que les points de vision ont été obtenus avec succès. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
-
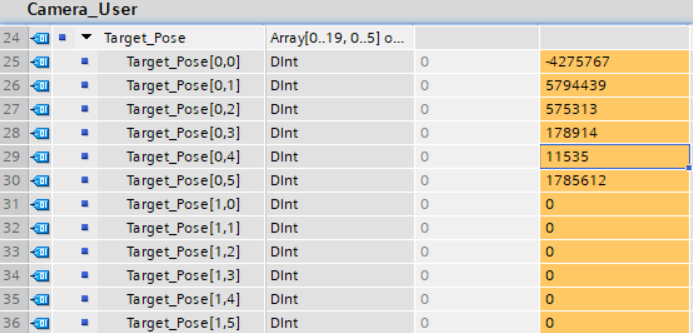
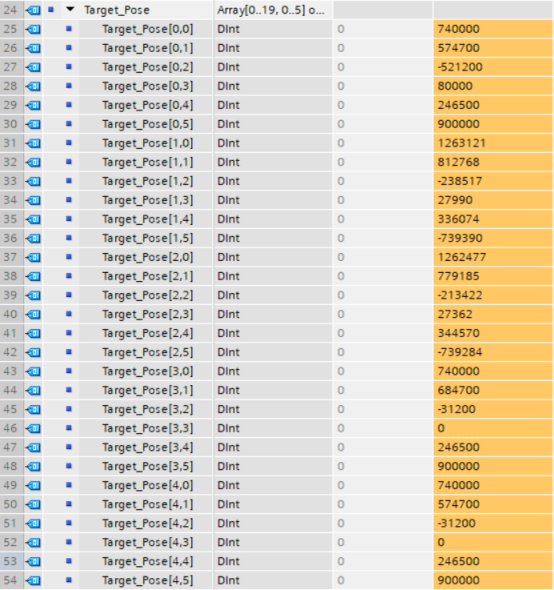
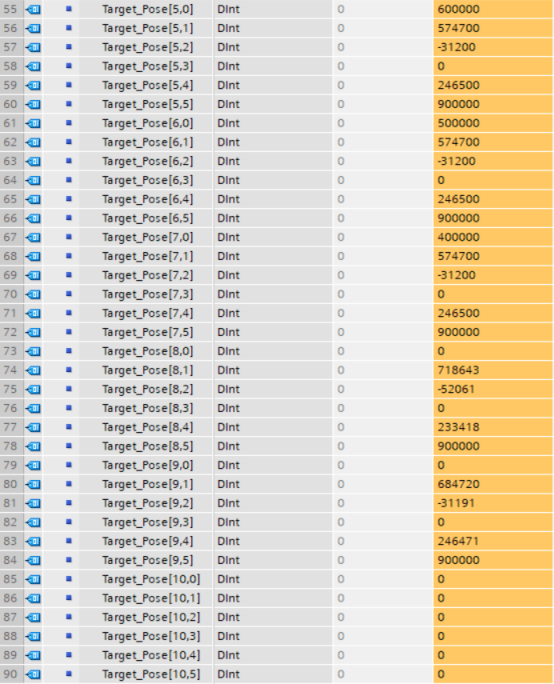
Les données renvoyées par le DB Camera_User sont illustrées ci-dessous. Les données de pose sont stockées dans TargetPose.
Automatiser le processus d’obtention du résultat de vision depuis Mech-Vision
Exemple de logique de contrôle automatique de Mech-Vision. Pour plus d’informations, voir MM_S1_Vis_Basic.
Exécuter le projet Mech-Viz et obtenir le chemin planifié
Configurer les programmes
-
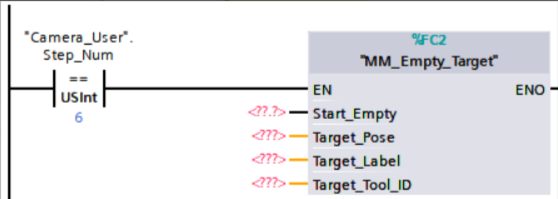
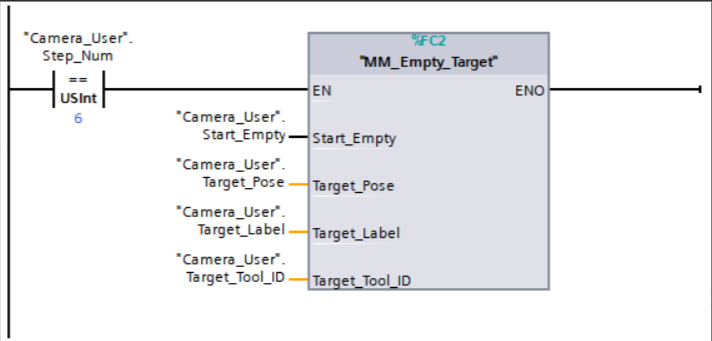
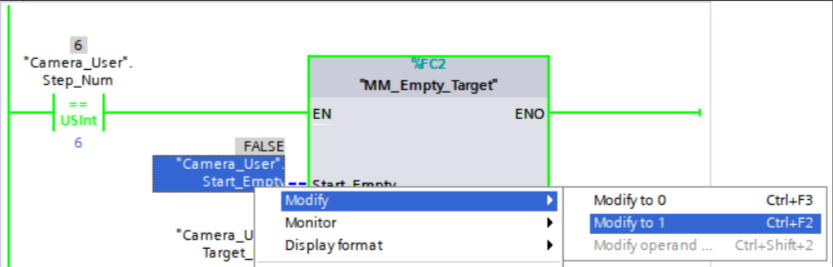
Faites glisser MM_Empty_Target vers Network 4 du programme principal et connectez MM_Empty_Target après "Camera_User".Step_Num==6.
-
Cliquez sur le DB Camera_User. Depuis le panneau Vue détaillée, faites glisser les paramètres vers les ports correspondants du FC “MM_Empty_Target”.
-
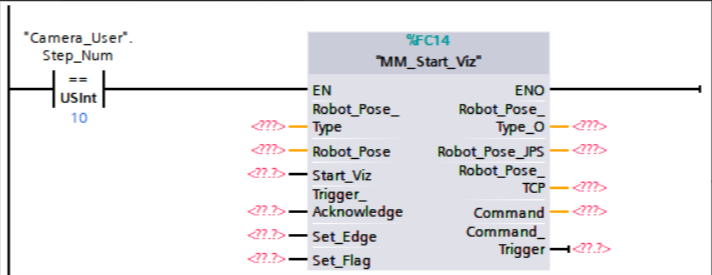
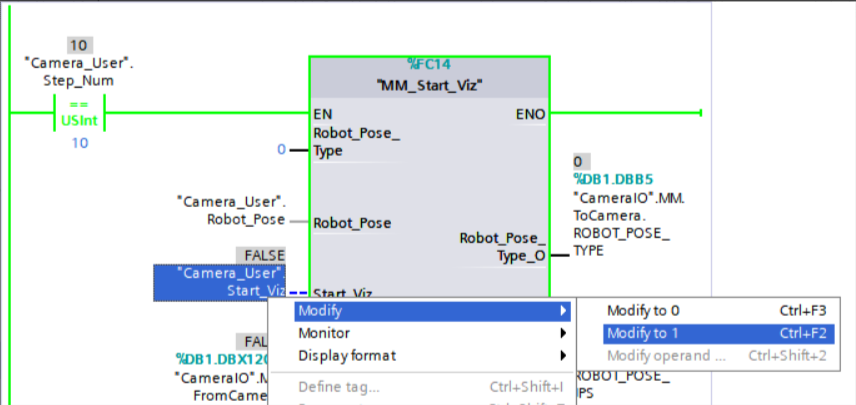
Faites glisser MM_Start_Viz vers Network 5 du programme principal et connectez MM_Start_Viz après "Camera_User".Step_Num==10.
-
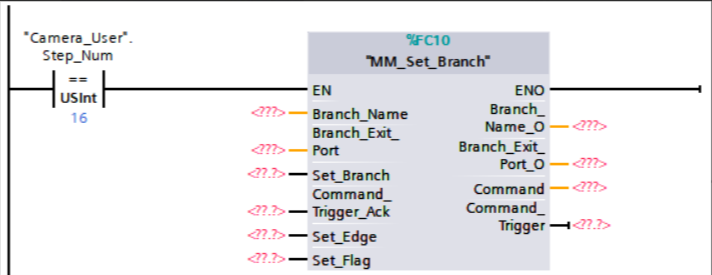
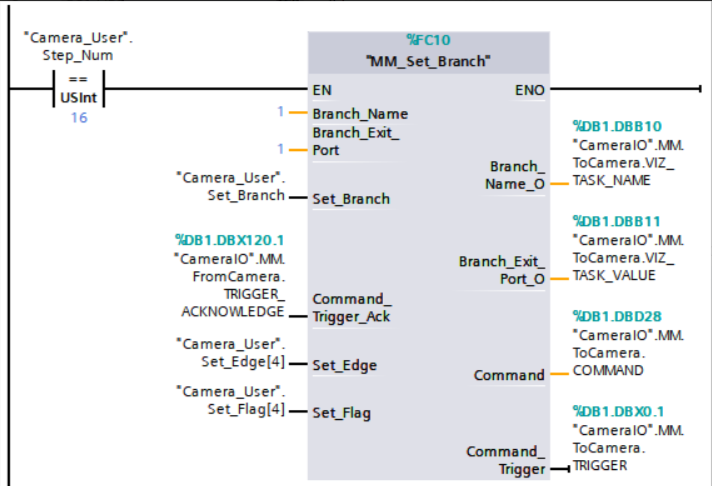
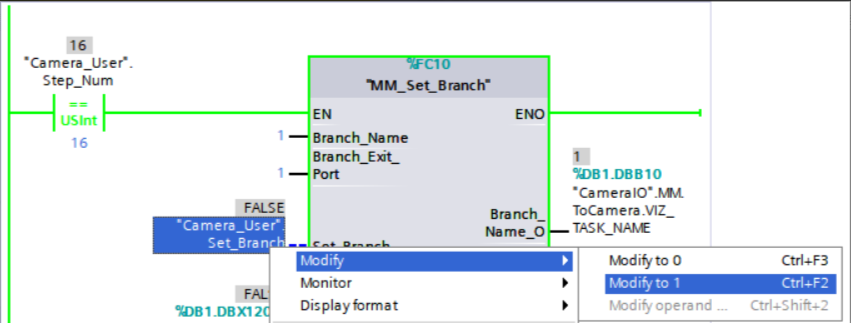
Faites glisser MM_Set_Branch vers Network 6 du programme principal et connectez MM_Set_Branch après "Camera_User".Step_Num==16.
-
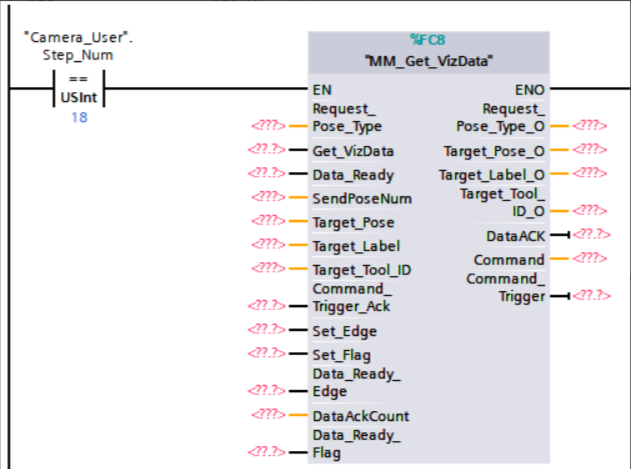
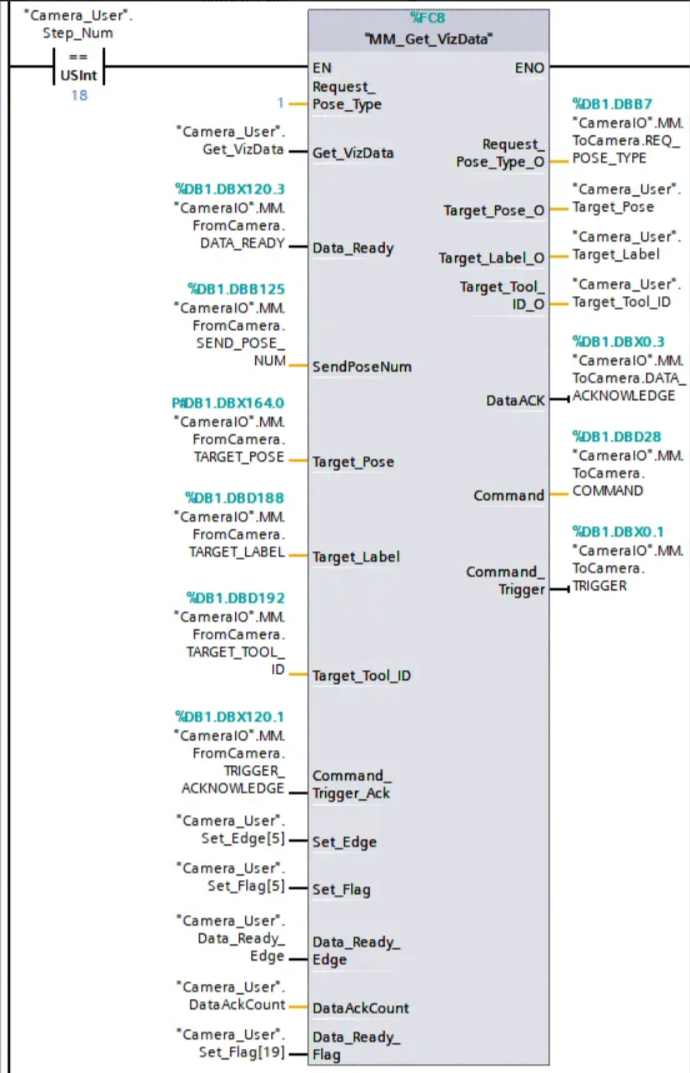
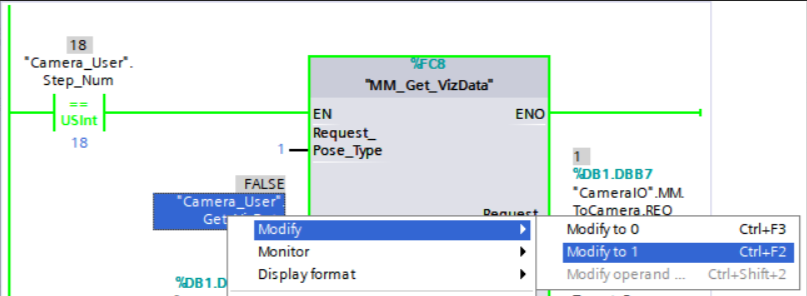
Faites glisser MM_Get_VizData vers Network 7 du programme principal et connectez MM_Get_VizData après "Camera_User".Step_Num==18.
-
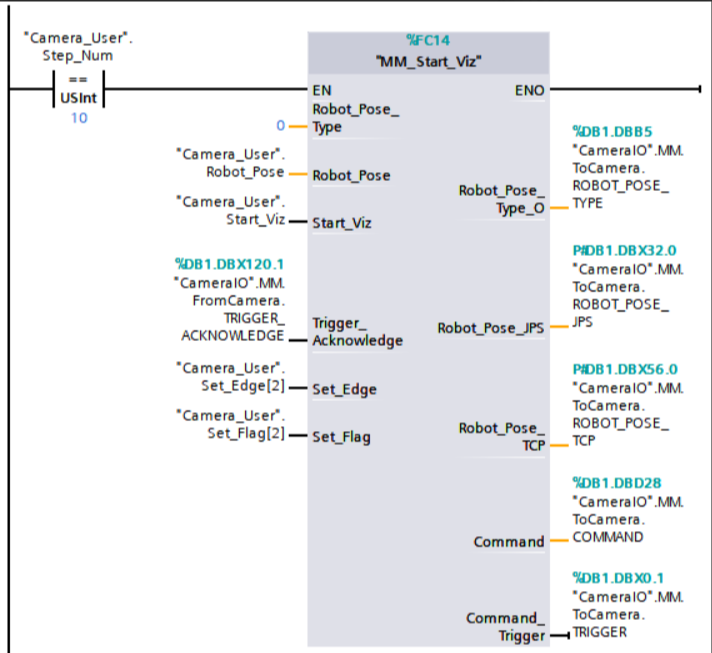
Définissez le type de pose envoyée par le robot. Modifiez la valeur du port Robot_Pose_Type. Si la valeur est définie sur 0, aucune pose de prise d’image ne sera envoyée (pour l’installation Eye-to-Hand). Si le projet est en mode Eye-in-Hand, veuillez définir la valeur du port Robot_Pose_Type sur 1 et définir la pose actuelle de la bride du robot sur le port Robot_Pose. Cliquez sur les DB Camera_User et CameraIO et faites glisser les paramètres dans la vue détaillée vers les ports correspondants de “MM_Start_Viz”.
-
Définissez les paramètres de branche dans le projet Mech-Viz. Définissez la valeur de Branch_Name et Branch_Exit_Port sur 1, et Mech-Viz prendra le port de sortie 1 pour l’étape “Branch by Msg” dont l’ID d’étape est 1. Cliquez sur les DB Camera_User et CameraIO et faites glisser les paramètres dans la vue détaillée vers les ports correspondants de “MM_Set_Branch”.
-
Définissez le type attendu de points de passage sur le chemin planifié. Modifiez la valeur de “Request_Pose_Type” à 1, et Mech-Viz renverra des données au format positions articulaires (au lieu du TCP). Cliquez sur les DB Camera_User et CameraIO et faites glisser les paramètres dans la vue détaillée vers les ports correspondants de “MM_Get_VizData”.
-
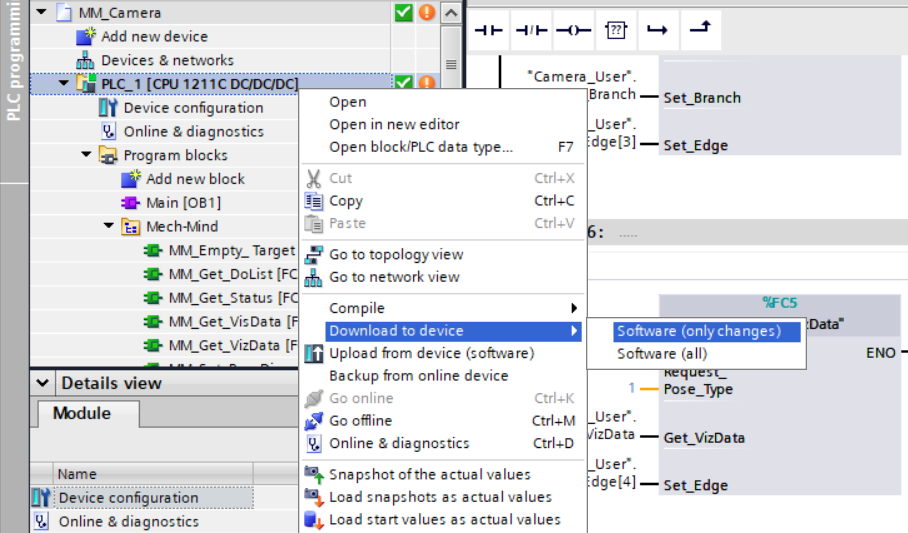
Dans le panneau Arborescence du projet, faites un clic droit sur PLC_1 et sélectionnez Download to device ‣ Software (only changes).
-
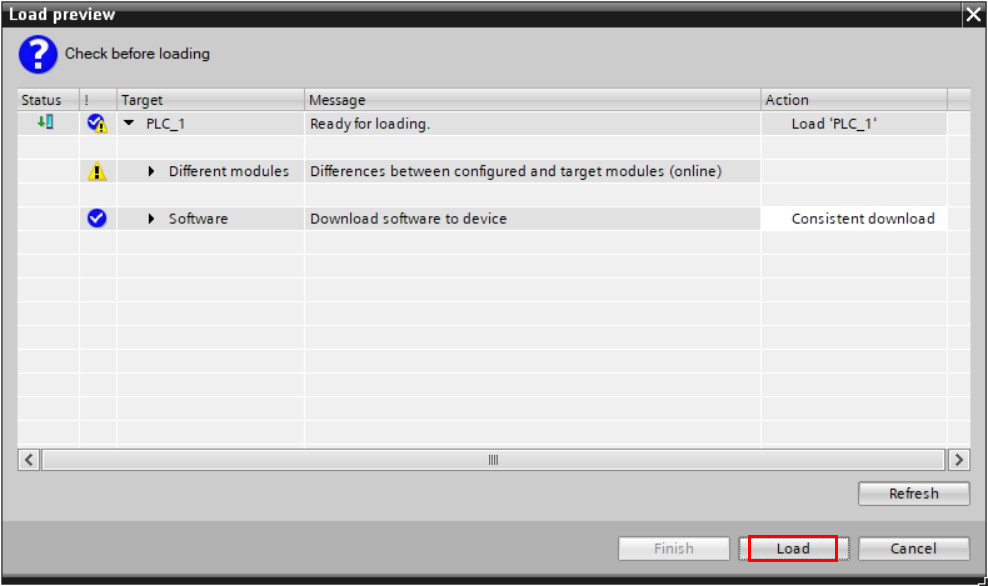
Dans la fenêtre contextuelle Load preview, cliquez sur Load pour télécharger les modifications vers l’API.
Déclencher l’exécution du projet Mech-Viz
-
Dans la fenêtre Main OB, cliquez sur l’icône Monitoring on/off.

-
Activez MM_Empty_Target (en définissant "Camera_User".Step_Num==6), faites un clic droit sur la variable côté entrée “Camera_User”.Start_Empty de MM_Empty_Target, puis sélectionnez pour obtenir le dernier résultat de vision. Ensuite, réinitialisez cette variable.
-
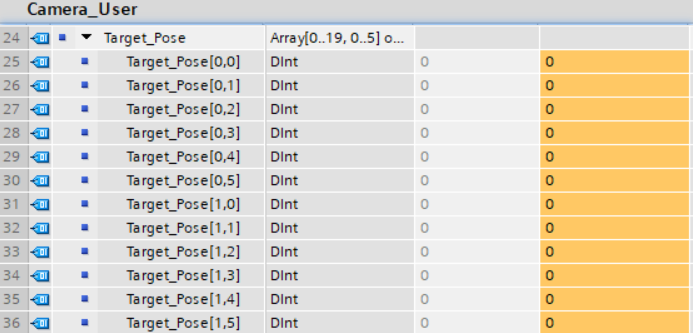
Dans le DB Camera_User, la valeur de Target Pose est effacée.
-
Activez MM_Start_Viz (en définissant "Camera_User".Step_Num==10), faites un clic droit sur la variable côté entrée “Camera_User”.Start_Viz de MM_Start_Viz, puis sélectionnez pour déclencher l’exécution du projet Mech-Viz. Ensuite, réinitialisez cette variable.
-
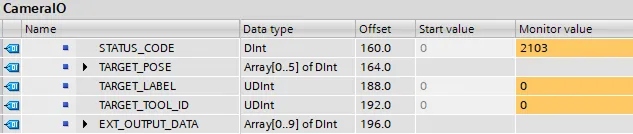
Vérifiez la valeur de retour de la variable STATUS_CODE dans le bloc de données CameraIO. 2103 signifie que le projet a démarré avec succès. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
Définir le port de sortie de la branche Mech-Viz
-
Activez MM_Set_Branch (en définissant "Camera_User".Step_Num==16), faites un clic droit sur la variable côté entrée “Camera_User”.Set_Branch de MM_Set_Branch, puis sélectionnez pour sélectionner le port de sortie du projet Mech-Viz. Ensuite, réinitialisez cette variable.
-
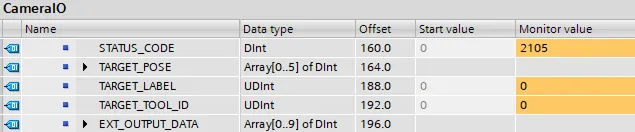
Vérifiez la valeur de retour de la variable STATUS_CODE dans le bloc de données CameraIO. 2105 signifie que la branche a été définie avec succès. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
Obtenir le chemin planifié depuis Mech-Viz
-
Activez MM_Get_VizData (en définissant "Camera_User".Step_Num==18), faites un clic droit sur la variable côté entrée “Camera_User”.Get_VizData de MM_Get_VizData, puis sélectionnez pour obtenir le chemin planifié par Mech-Viz. Ensuite, réinitialisez cette variable.
-
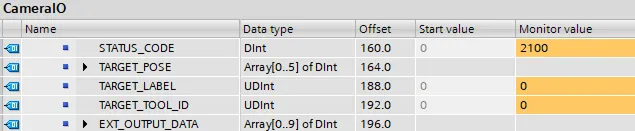
Vérifiez la valeur de retour de la variable STATUS_CODE dans le bloc de données CameraIO. 2100 signifie que le chemin planifié a été obtenu avec succès. Sinon, le code d’erreur correspondant sera renvoyé. Veuillez vous référer à Codes d’état et dépannage pour le dépannage.
-
Les données renvoyées par la variable TargetPose dans le DB Camera_User sont illustrées ci-dessous.
Automatiser le processus d’obtention du chemin planifié depuis Mech-Viz
Exemple de logique de contrôle automatique de Mech-Viz. Pour plus d’informations, voir MM_S5_Viz_SetBranch.