Commandes d’interface standard
Le système de vision Mech-Mind fournit six composants de commandes d’interface standard, comme illustré dans la figure suivante.

Précautions
Configurer les paramètres réseau
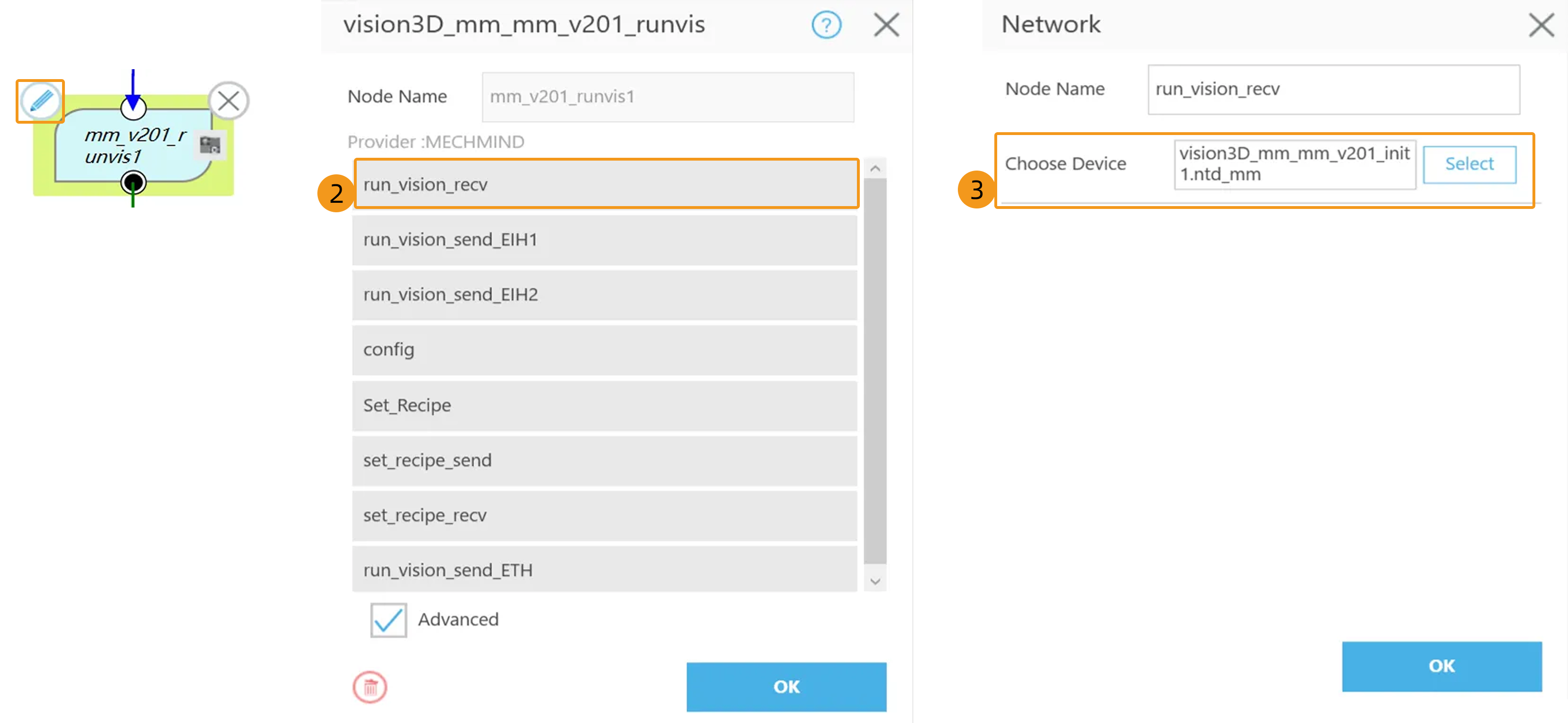
Pour les composants de commande glissés depuis Composants sur la gauche (à l’exception de MM init), cliquez sur l’icône d’édition dans le coin supérieur gauche du composant, cochez l’option Avancé, puis définissez tous les périphériques réseau avec les attributs send et recv sur les périphériques réseau générés par MM init. Cela garantit que tous les périphériques réseau des composants sont cohérents.
Dans la figure suivante, run_vision_recv de Run Vision est utilisé pour définir le périphérique réseau pour run_vision_recv.
Modifier la valeur du paramètre du composant
Si vous devez modifier la valeur d’un paramètre de composant, consultez les opérations suivantes.
La section suivante explique comment modifier la valeur du paramètre en utilisant le composant Run Vision → groupe de paramètres Set_Recipe → paramètre g_mm_whether_set_recipe.
-
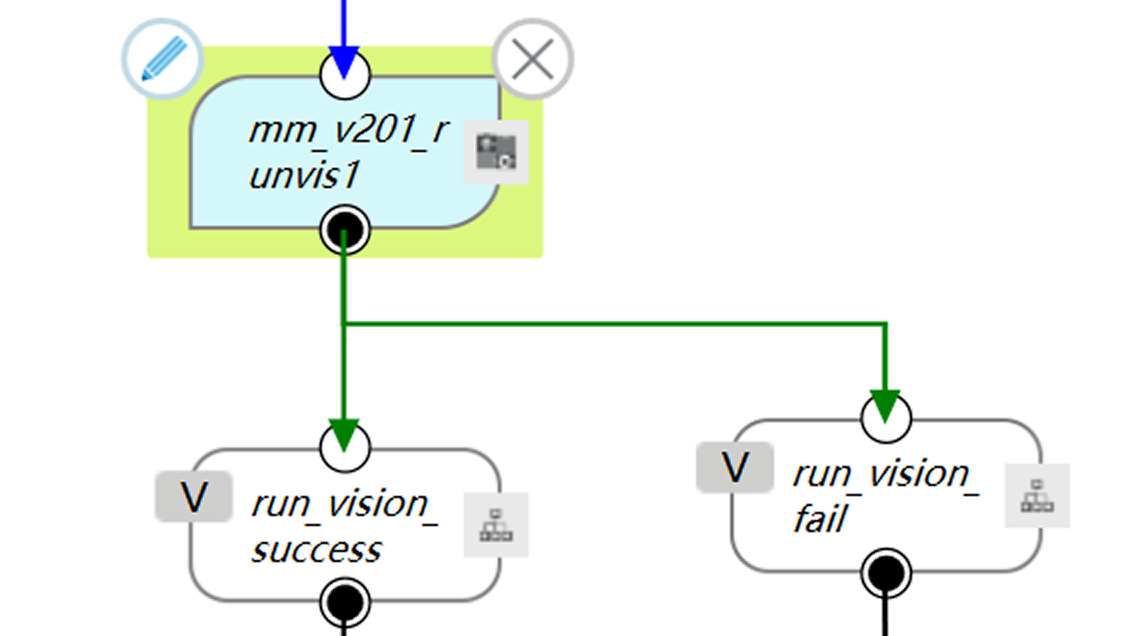
Sélectionnez mm_v201_runvis1 et cliquez sur l’icône d’édition dans le coin supérieur gauche.
-
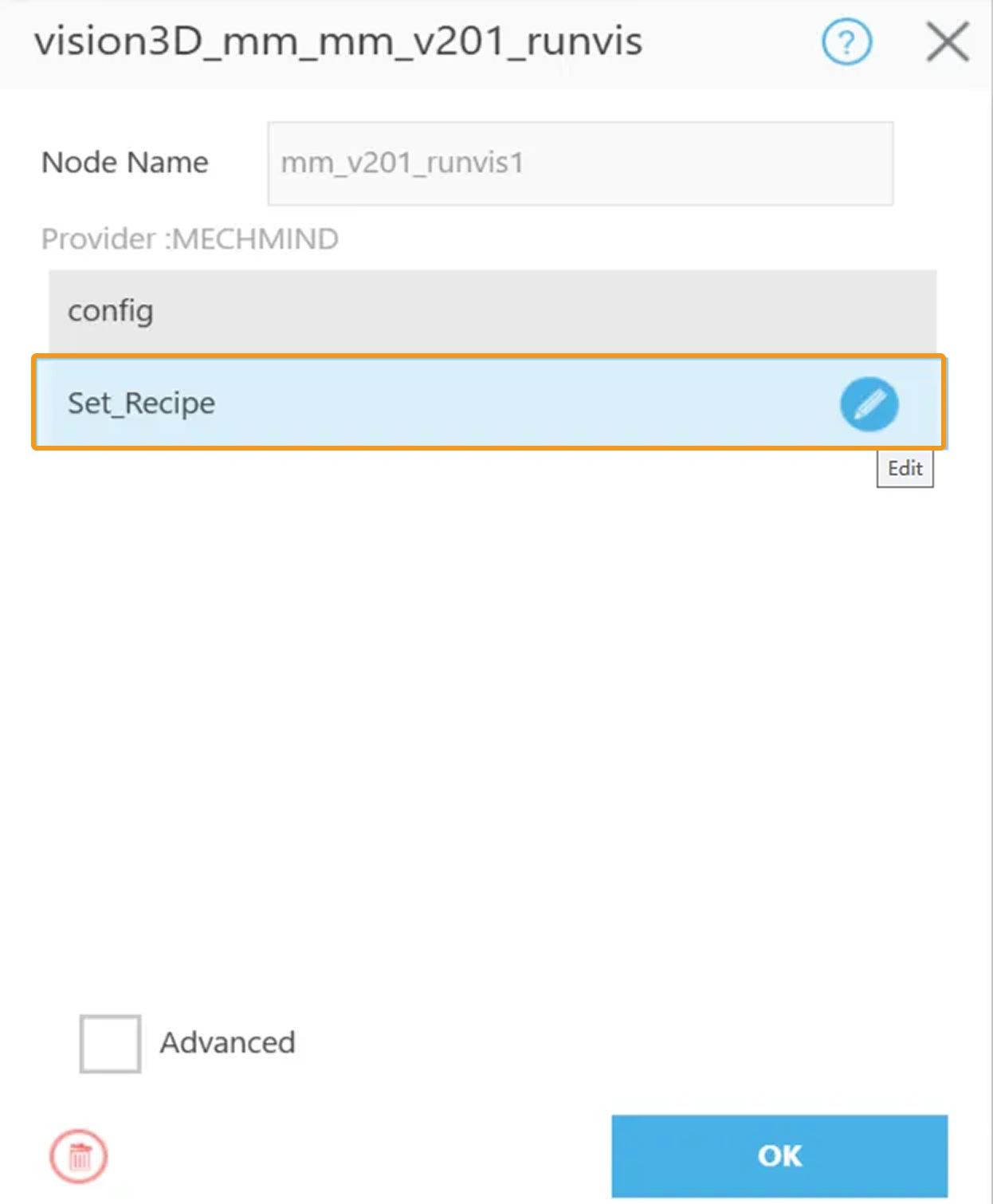
Sélectionnez Set_Recipe et cliquez sur l’icône d’édition.
-
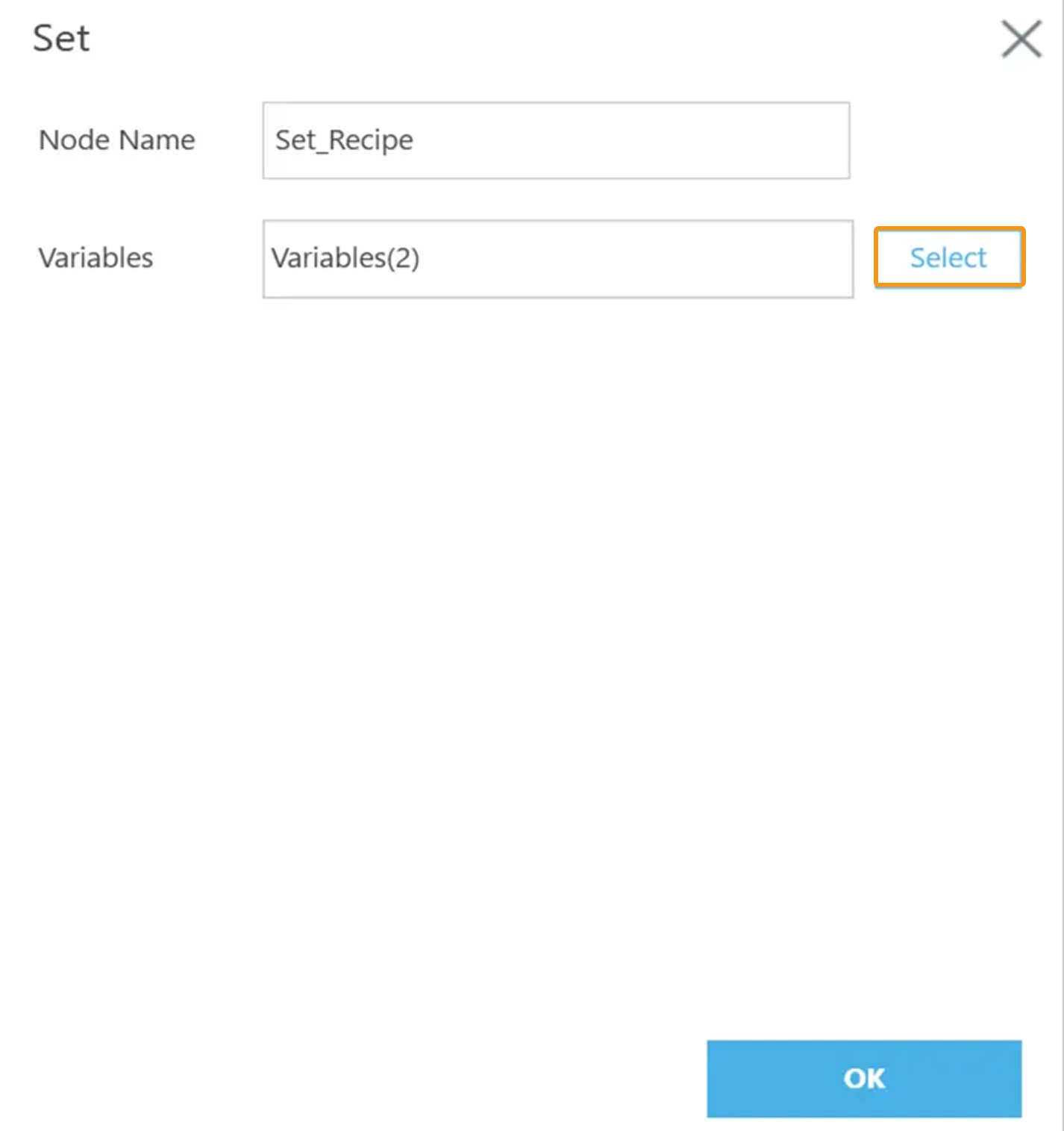
Cliquez sur Sélectionner.
-
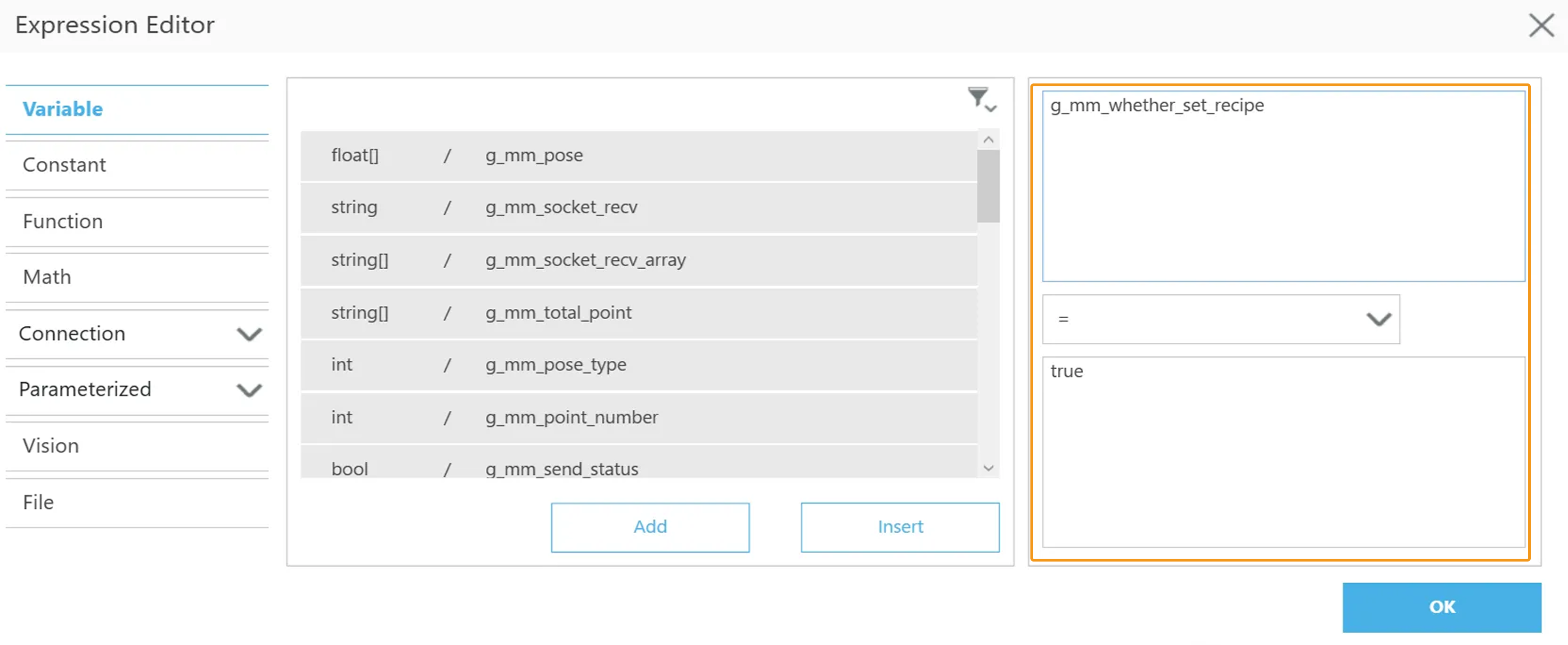
Sélectionnez g_mm_whether_set_recipe et cliquez sur l’icône d’édition.
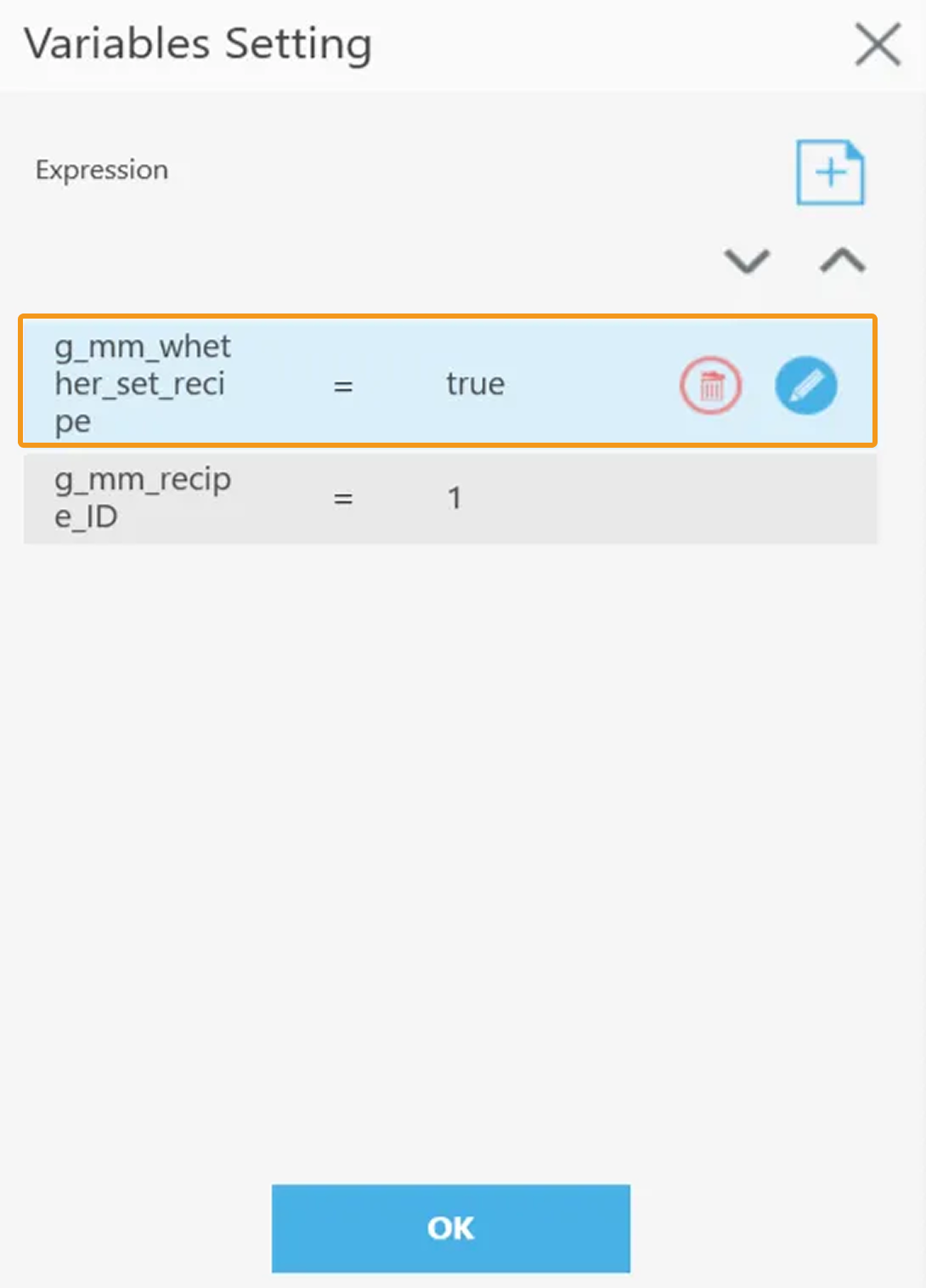
-
Modifiez la valeur du paramètre dans la section de droite et cliquez sur OK.
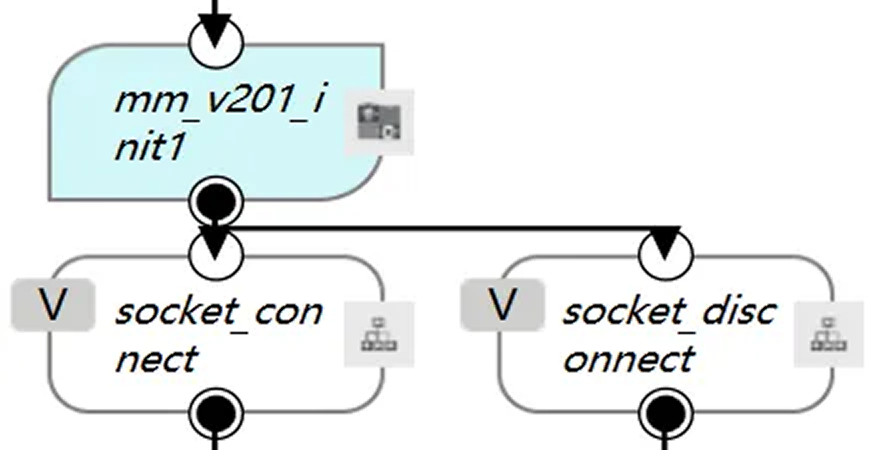
Initialiser la communication (MM init)
Ce composant sert à établir une connexion réseau avec l’IPC. Par conséquent, ce composant doit être placé au début du programme.
Paramètres
Pour savoir comment modifier l’adresse IP et le numéro de port d’un IPC, consultez ce document.
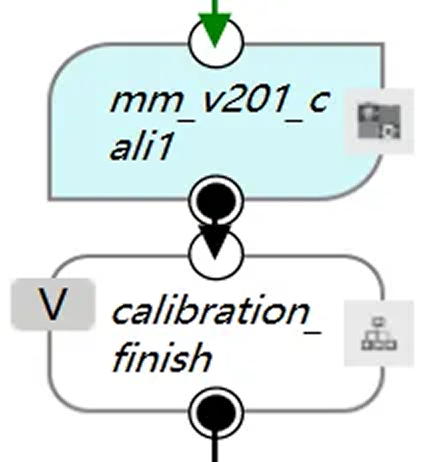
Calibration (MM calibration)
Ce composant est utilisé pour l’étalonnage de la caméra et comprend l’ensemble du processus d’étalonnage. Il ne comporte aucun paramètre configurable.
Exécuter le projet Mech-Vision (Run Vision)
Ce composant déclenche les opérations suivantes, dans l’ordre : définir la recette de paramètres à utiliser par le projet Mech-Vision (étape ignorée si le projet n’a pas de recette de paramètres), lancer l’exécution du projet Mech-Vision, et obtenir le résultat de vision (c’est-à-dire les points de vision) depuis le système de vision.
Paramètres
-
config
-
g_mm_pose_type: Ce paramètre spécifie la manière dont la pose réelle du robot est envoyée au projet Mech-Vision. Valeurs valides: 0, 1 et 2. Le tableau suivant décrit les détails.
g_mm_pose_type Description Scénario applicable 0
Le composant n’envoie pas la pose du robot au projet Mech-Vision.
Ce réglage est recommandé lorsque la caméra est montée en mode œil-vers-main.
1
Ce composant envoie les positions articulaires actuelles du robot au projet Mech-Vision.
Ce réglage doit être utilisé lorsque la caméra est montée en mode œil-dans-la-main.
Ce réglage est recommandé pour la plupart des scénarios sauf ceux impliquant des robots portiques.
2
Spécifie que la pose de la bride du robot doit être fournie au projet Mech-Vision.
Ce réglage est recommandé pour les scénarios impliquant des robots portiques.
-
g_mm_point_number: Le nombre de points de vision.
Par défaut, le système de vision envoie au maximum 20 points de vision à la fois. Par conséquent, la valeur par défaut maximale de ce paramètre est 20. Depuis la barre d’outils de Mech-Vision, allez à . Modifiez la valeur de max num of poses to send per time. La limite est de 30.
-
g_mm_project_ID: L’ID du projet Mech-Vision.
L’ID du projet Mech-Vision, qui est le numéro avant le nom du projet dans le panneau Liste des projets de Mech-Vision.
-
-
Set_Recipe
-
g_mm_whether_set_recipe: Indique s’il faut définir la recette de paramètres. true signifie que la recette de paramètres est définie, et false signifie qu’elle ne l’est pas.
-
g_mm_recipe_ID: L’ID de la recette de paramètres dans le projet Mech-Vision.
-
Exécuter le projet Mech-Viz (Run Viz)
Ce composant effectue les opérations suivantes, dans l’ordre : déclencher l’exécution du projet Mech-Viz, définir la valeur Current Index du Step de type index (si vous n’avez pas besoin de spécifier la valeur Current Index dans le projet, vous pouvez ignorer cette opération), spécifier le port de sortie du Step Branch by Msg (si aucun Step Branch by Msg n’existe dans le projet, vous pouvez ignorer cette opération), et renvoyer le chemin planifié par le projet Mech-Viz.
Paramètres
-
Config
-
g_mm_pose_type: Ce paramètre spécifie la manière dont la pose réelle du robot est envoyée au projet Mech-Viz. Valeurs valides: 0 et 1. Le tableau suivant décrit les détails.
g_mm_runviz_pose_type Description Scénario applicable 0
La pose du robot n’a pas besoin d’être envoyée au projet Mech-Viz. Le robot simulé dans le projet Mech-Viz se déplacera depuis la position d’origine définie vers le premier point de passage.
Ce réglage est recommandé lorsque la caméra est montée en mode œil-vers-main.
1
Ce composant envoie les positions articulaires actuelles et la pose de la bride du robot au projet Mech-Viz. Le robot simulé dans Mech-Viz se déplace depuis les positions articulaires saisies vers le premier point de passage.
Ce réglage est recommandé lorsque la caméra est montée en mode œil-dans-la-main.
-
g_whether_after_161: Indique si la version de Mech-Vision et Mech-Viz est ultérieure à 1.6.1. True signifie que oui, et false signifie que non.
-
-
Set_Branch
-
g_mm_whether_set_branch: Indique s’il faut définir le port de sortie du Step Branch by Msg. true indique qu’il faut définir le port de sortie, et false indique qu’il ne faut pas le définir.
-
g_mm_branch_task_ID: L’ID du Step Branch by Msg.
-
g_mm_branch_out_port: Le numéro du port de sortie du Step Branch by Msg à emprunter.
-
-
Set_Index
-
g_mm_whether_set_index: Indique s’il faut définir la valeur Current Index. true signifie que la valeur doit être définie, et false signifie qu’elle n’a pas besoin de l’être.
-
g_mm_index_task_ID: L’ID du Step avec le paramètre Current Index.
-
g_mm_index_value: La valeur du paramètre Current Index.
-
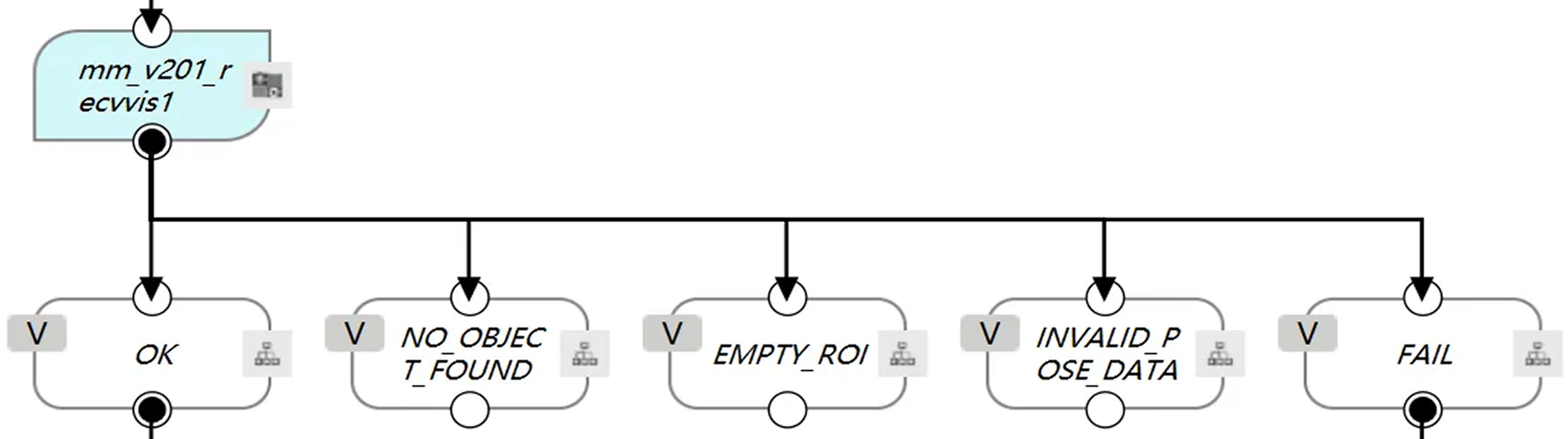
Obtenir le résultat de vision (Receive Vision)
Ce composant est utilisé pour obtenir le résultat de vision depuis le projet Mech-Vision correspondant. Le sous-nœud qu’il emprunte dépend du code d’état reçu.
Une fois l’exécution de ce composant terminée, le résultat de vision renvoyé par Mech-Vision sera stocké dans la variable globale g_mm_socket_recv_array sous forme de tableau de chaînes (string[]). Vous pouvez traiter les données dans la variable selon des exigences spécifiques.
Sous-nœuds et codes d’état correspondants:
Obtenir le chemin planifié (Receive Viz)
Ce composant obtient le chemin planifié par le projet Mech-Viz sous forme d’une série de points de passage.
Une fois l’exécution de ce composant terminée, le chemin planifié renvoyé par Mech-Viz sera stocké dans la variable globale g_mm_socket_recv_array sous forme de tableau de chaînes (string[]). Vous pouvez traiter les données dans la variable selon des exigences spécifiques.
Les poses des points de passage sont stockées dans la variable globale g_mm_total_point sous forme de tableau de chaînes (string[]). Les 6 premiers éléments du tableau représentent la pose du premier point de passage, les 7e à 12e éléments représentent la pose du deuxième point de passage, et ainsi de suite.
De plus, ce composant fournit également une variable entière g_mm_recv_viz_time, utilisée pour enregistrer le nombre de fois que le composant a été exécuté. Cette variable commence à compter à partir de 0 et correspond à l’exécution du composant Receive Viz une fois. Si le composant Receive Viz est exécuté deux fois, la valeur de la variable sera 1.