Configurer la communication de l’Interface standard avec ROKAE
Ce guide explique comment configurer la communication via l’Interface standard avec un robot ROKAE.
Vérifier les versions du matériel et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Le robot utilisé est un robot industriel ROKAE.
-
La série du contrôleur est XBC3, et la version est 3.6.
Démarrer le robot et le boîtier d’apprentissage
Allumez l’interrupteur d’alimentation du contrôleur, comme montré ci-dessous. Si le contrôleur démarre correctement, une interface de bienvenue apparaîtra sur le boîtier d’apprentissage.

Vérifier la version du contrôleur
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Aide pour vérifier la version.

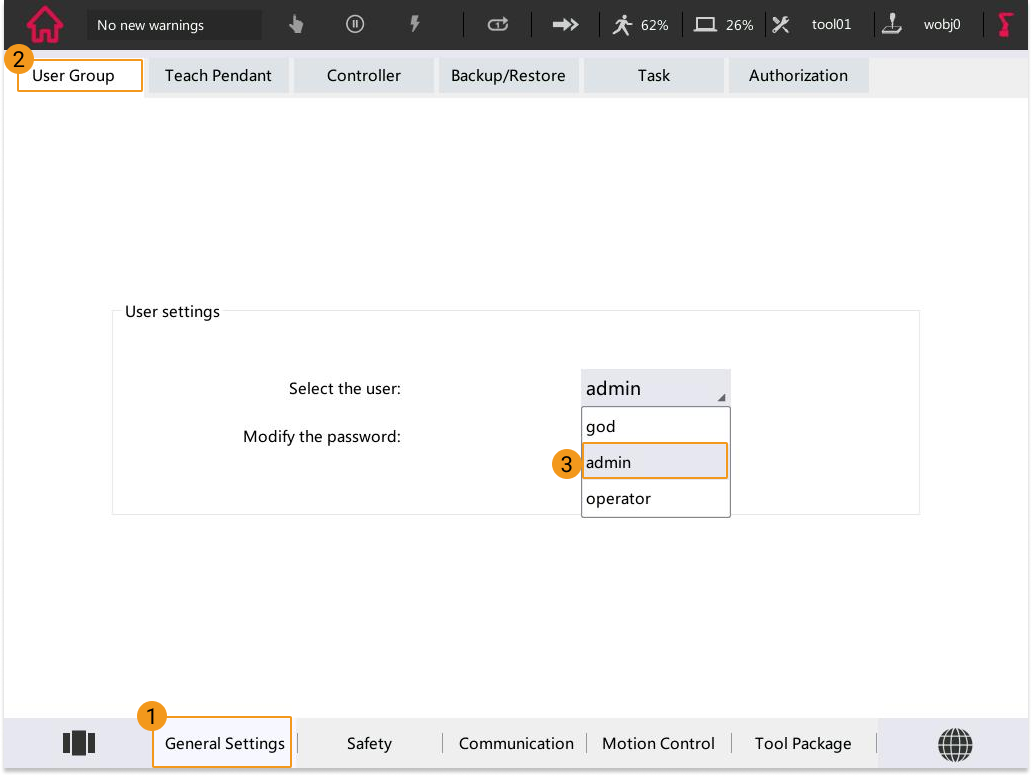
Passer le type d’utilisateur à Admin
Un utilisateur opérateur n’a pas le droit de gérer des fichiers ni d’opérer. Par conséquent, veuillez passer à l’utilisateur admin.
-
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur , et sélectionnez admin.
-
Saisissez le mot de passe 123456 dans la fenêtre contextuelle.
Configurer la connexion réseau
Connecter le matériel
Utilisez le câble Ethernet pour connecter les ports réseau de l’IPC et du contrôleur du robot.

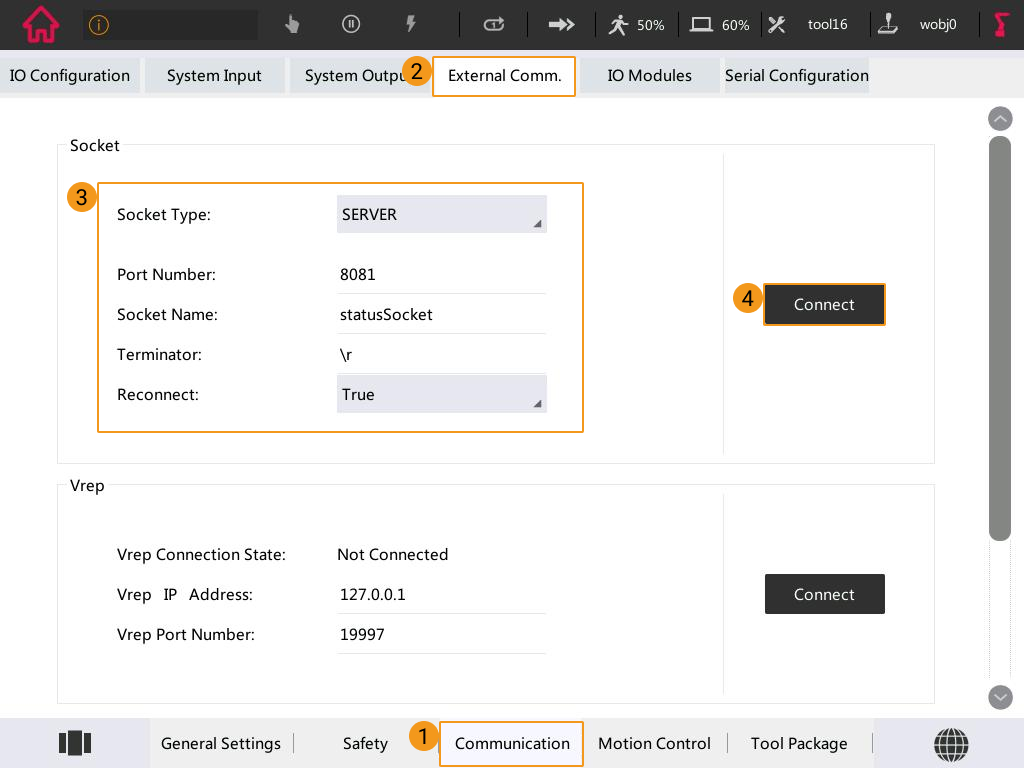
Configurer la communication externe
-
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur , configurez la communication Socket comme montré sur la figure ci-dessous, puis cliquez sur Connecter.
-
Redémarrez le contrôleur.
Définir l’adresse IP de l’IPC
L’adresse IP par défaut du robot ROKAE pour communiquer avec le système de vision est 192.168.2.160, qui ne peut pas être modifiée actuellement. Cependant, vous pouvez modifier l’adresse IP de l’IPC (192.168.2.222 est utilisée dans cet exemple) afin de vous assurer que leurs adresses IP sont sur le même sous-réseau. Veuillez vous référer à Définir l’adresse IP de l’IPC pour des instructions détaillées.
Après avoir modifié l’adresse IP sur l’IPC, ouvrez la fenêtre Invite de commandes de l’IPC, saisissez “ping 192.168.2.160”, et testez si la connexion entre l’IPC et le robot est réussie.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
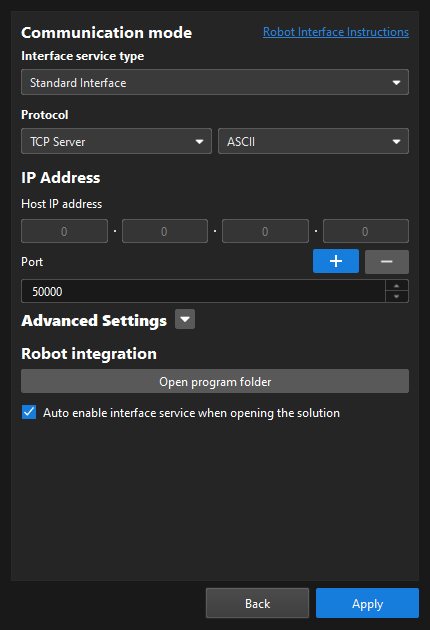
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme sur le robot
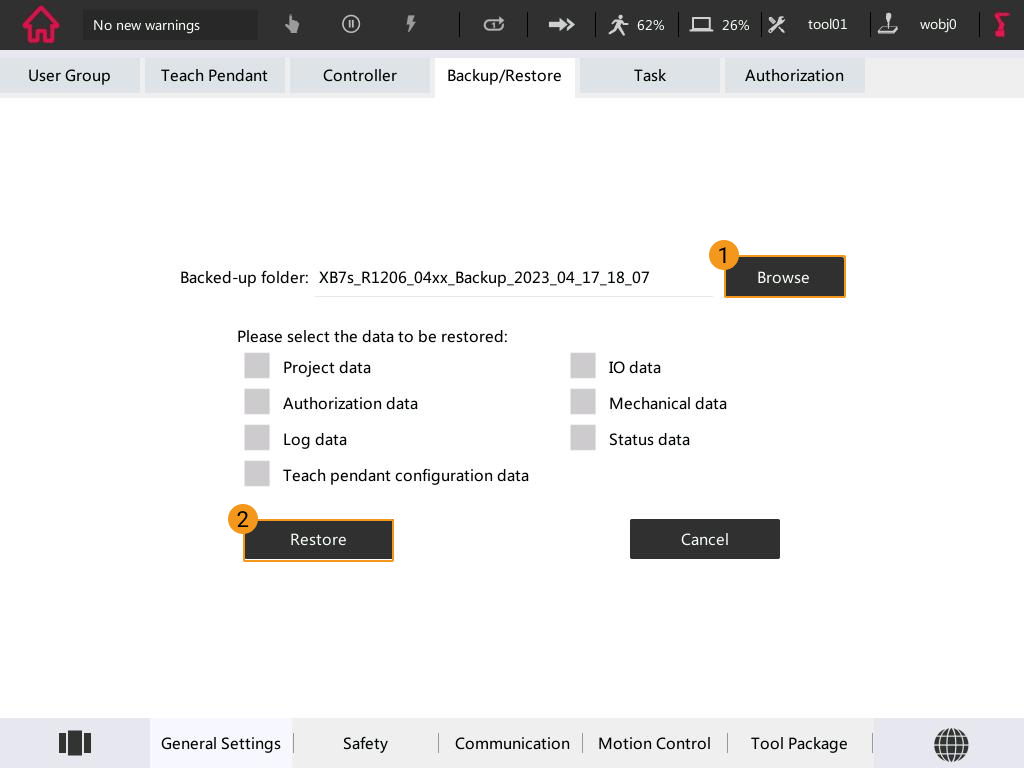
| Il est recommandé de sauvegarder les fichiers système du robot avant de charger les fichiers de programme Master-Control afin d’éviter toute corruption du système susceptible d’être causée par l’opération de chargement. En cas de problème, vous pouvez utiliser le fichier de sauvegarde pour restaurer le système du robot. Veuillez vous référer à Sauvegarder et restaurer les fichiers du robot pour des instructions détaillées. |
-
Branchez la clé USB sur le port USB de l’IPC. Créez un dossier
MM_Projectsur la clé USB. -
Sur l’IPC, copiez tous les fichiers du dossier de programme ouvert (le dossier
ROKAE) vers le dossierMM_Projectde la clé USB, puis débranchez la clé USB.Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/ROKAEdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Branchez la clé USB contenant les fichiers de programme dans le port USB sur le boîtier d’apprentissage.
-
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Projet.
-
Appuyez sur Gestionnaire de projet.
-
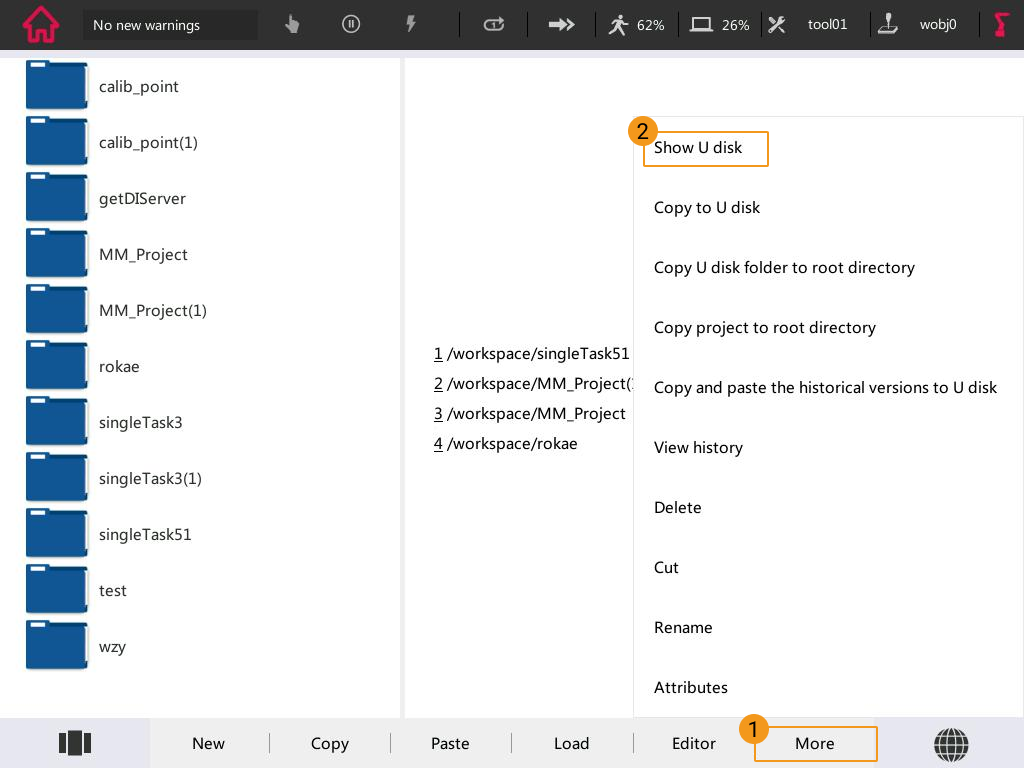
Appuyez sur Plus et sélectionnez Afficher le disque U.
-
Sélectionnez le dossier MM_Project sur la clé USB, appuyez sur Plus, et sélectionnez Copier le dossier du disque U vers le répertoire racine.
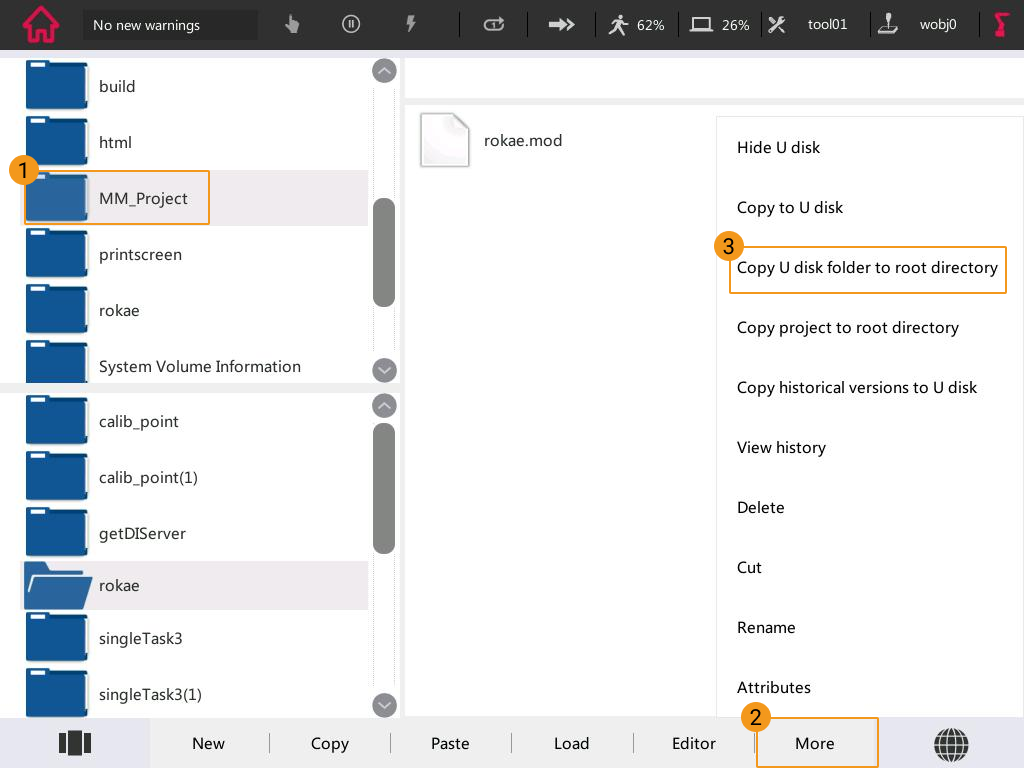
Une fois le collage réussi, le dossier MM_Project peut être trouvé dans le navigateur de fichiers en bas à gauche.
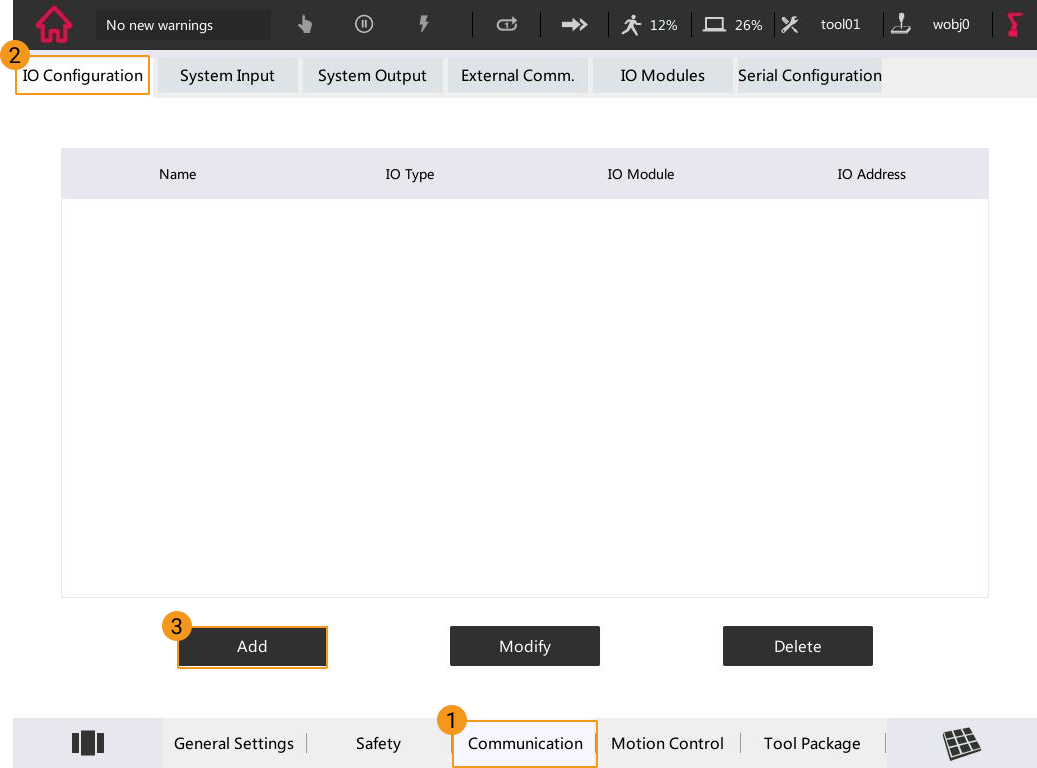
Configurer les E/S du robot
-
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez successivement sur .
-
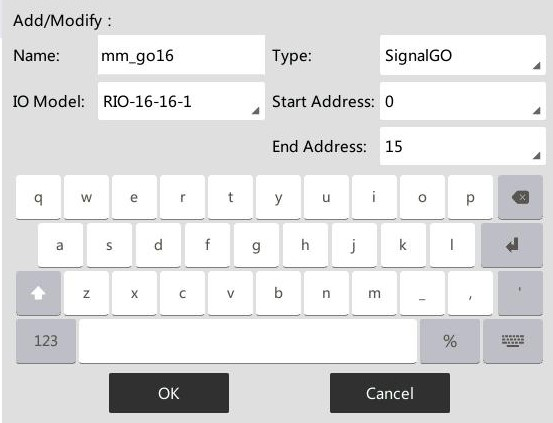
Configurez les options comme montré sur la figure ci-dessous, et appuyez sur OK.
Tester la communication de l’Interface standard
-
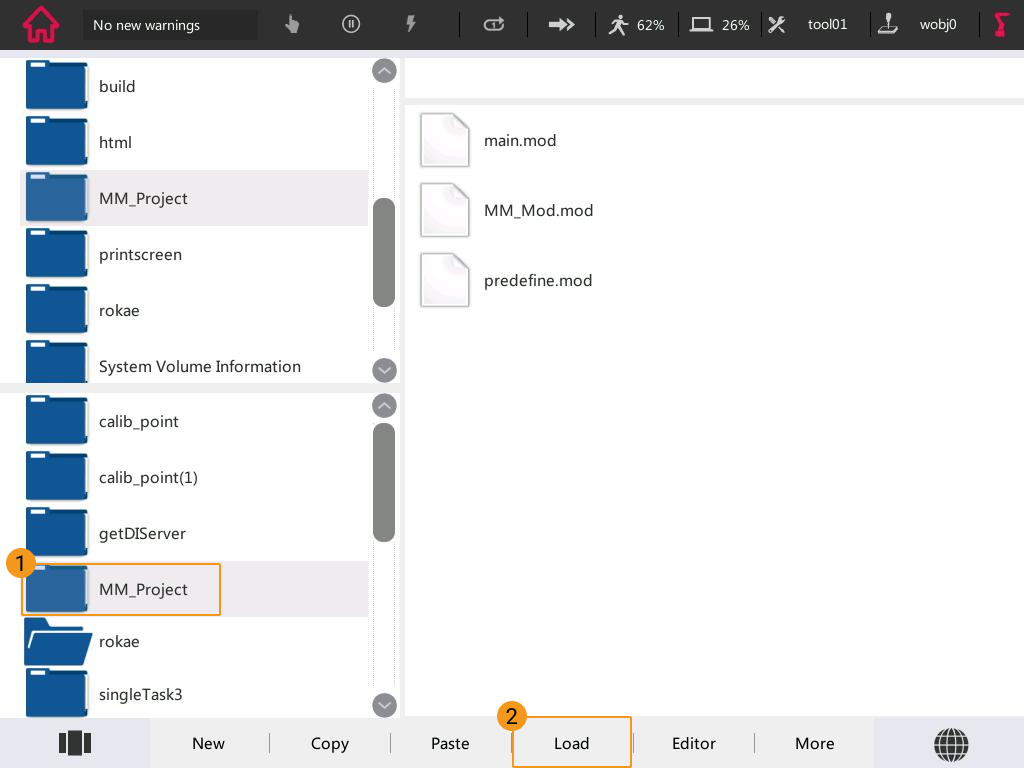
Dans la fenêtre Gestionnaire de projet sur le boîtier d’apprentissage, sélectionnez le dossier MM_Project et appuyez sur Charger.
-
Sélectionnez la ligne “// MM_Calibration()”, et appuyez sur .
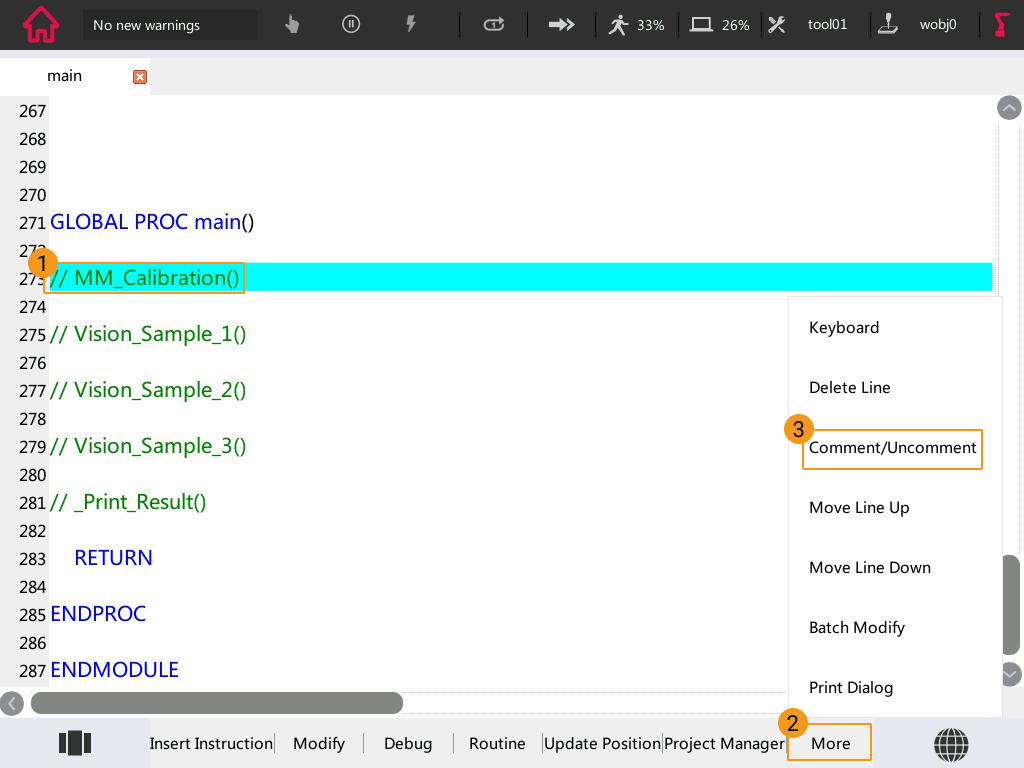
-
Puis appuyez sur .
-
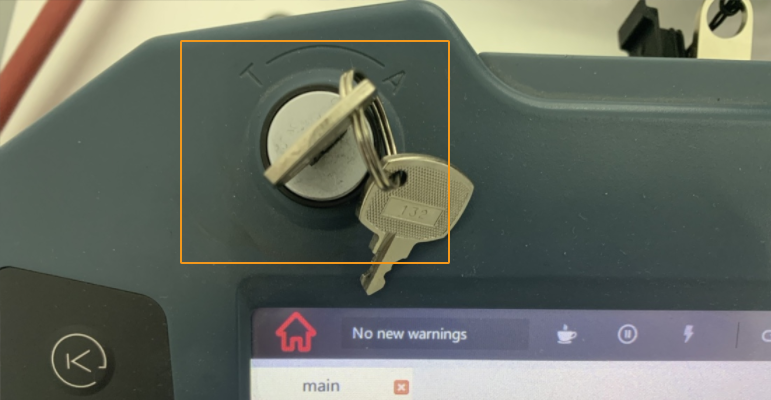
Passez du mode manuel au mode automatique. La figure ci-dessous montre le boîtier d’apprentissage en mode automatique.
Sélectionnez Ok dans la fenêtre contextuelle comme indiqué ci-dessous.
-
Appuyez sur le bouton du contrôleur comme montré sur la figure ci-dessous. Si le voyant, qui clignotait auparavant, devient fixe, le servo est activé avec succès en mode automatique.

-
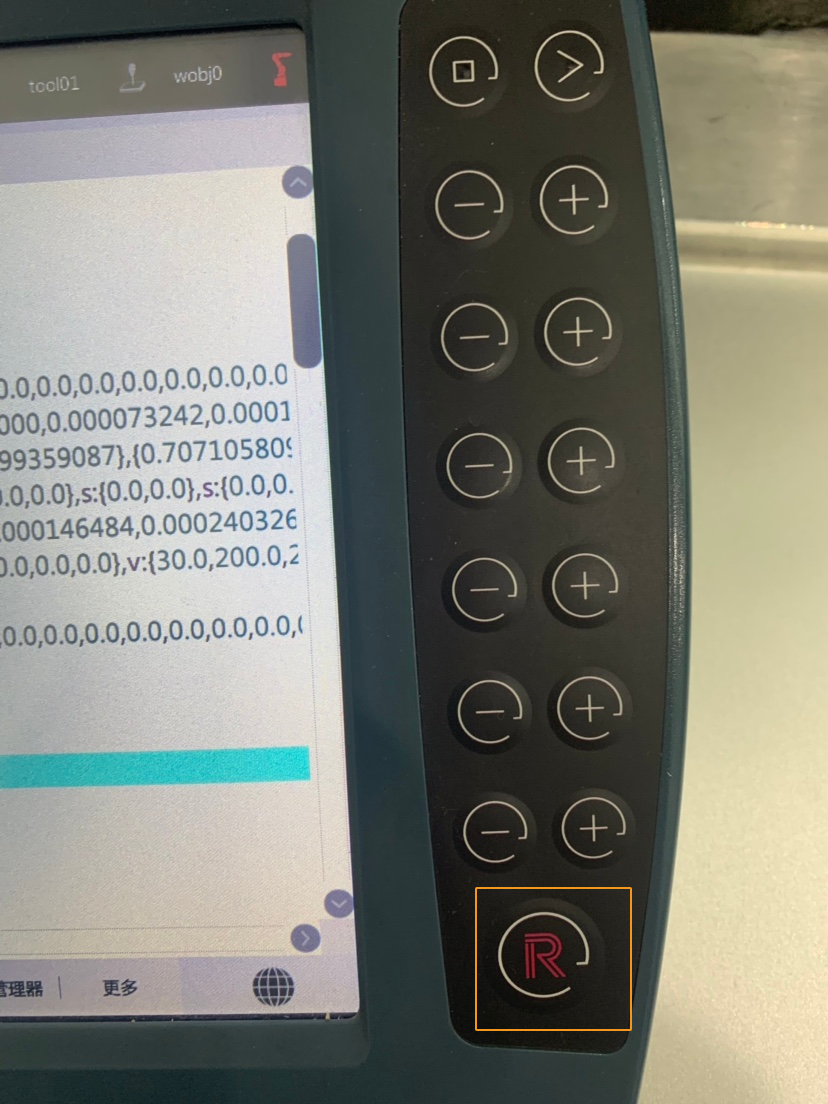
Appuyez sur le bouton R dans l’angle inférieur droit pour mettre le robot sous tension.
-
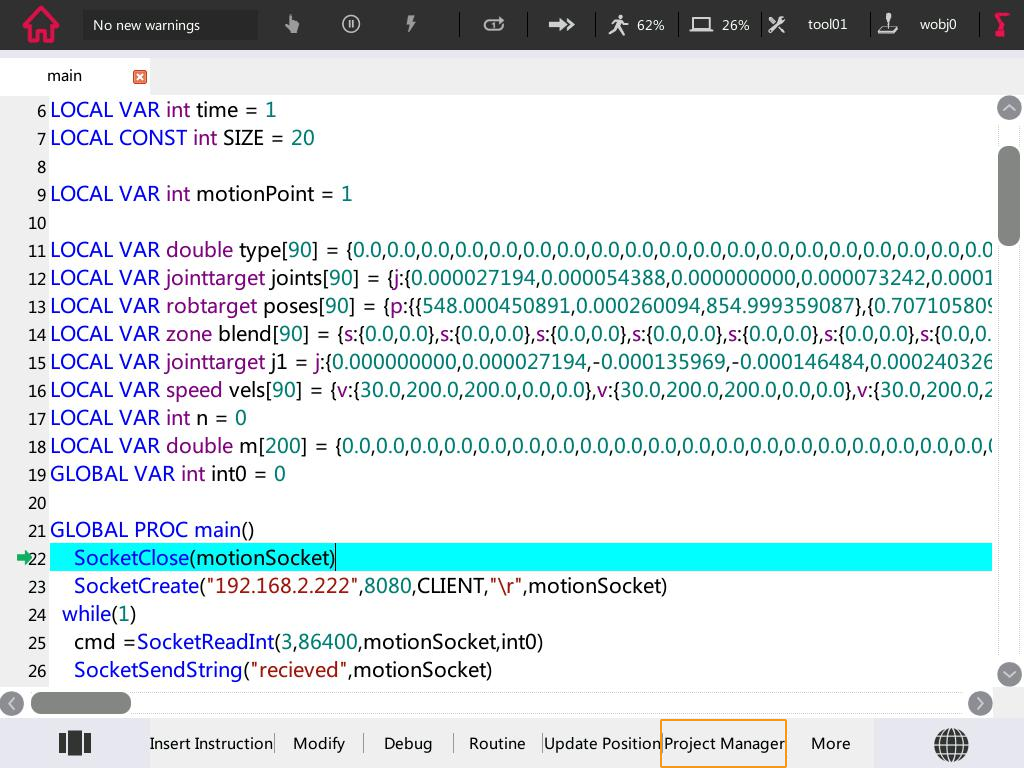
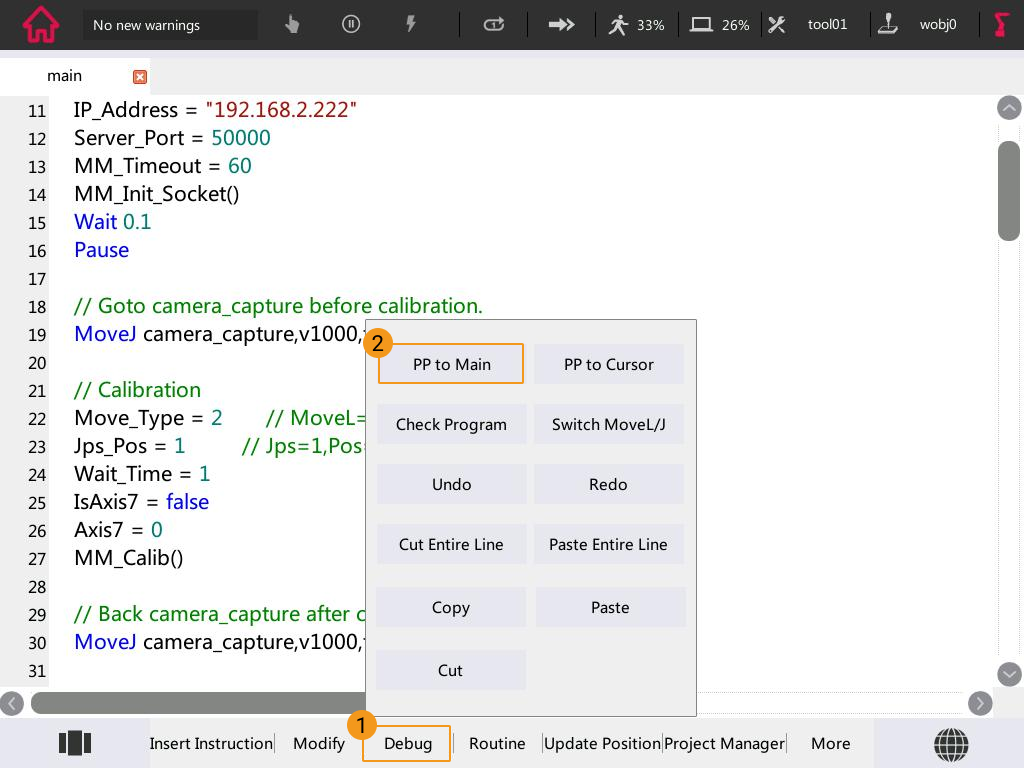
Appuyez sur Débogage et sélectionnez PP vers Main.
-
Cliquez sur l’icône comme montré ci-dessous pour ajuster la vitesse d’exécution du programme.

-
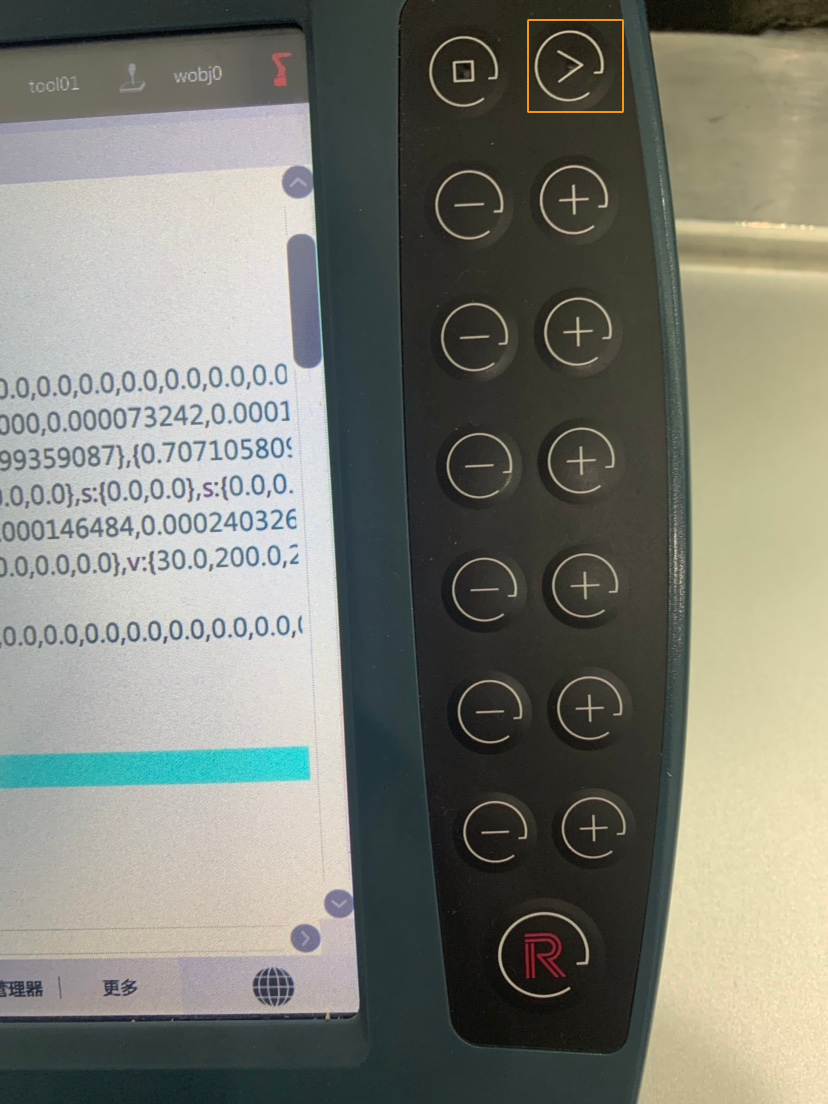
Appuyez sur le bouton comme montré ci-dessous pour exécuter le programme.
-
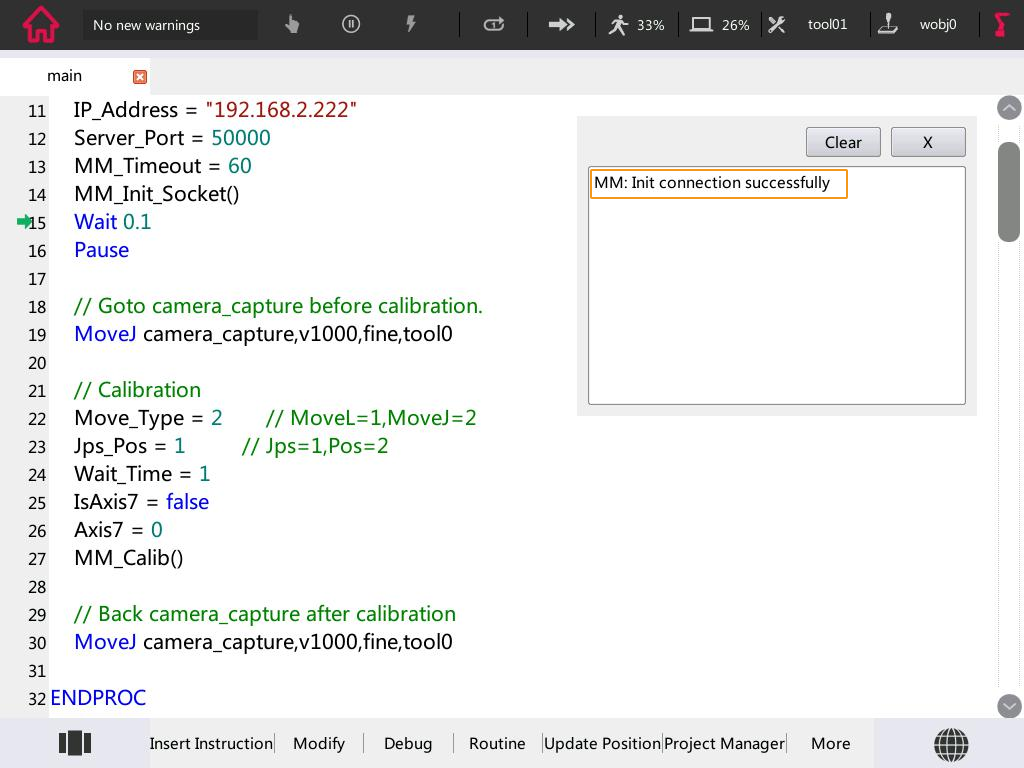
Vérifiez à nouveau si la connexion est établie. Lorsque le message suivant apparaît sur le boîtier d’apprentissage, le robot est connecté avec succès au système de vision.
Opérations courantes
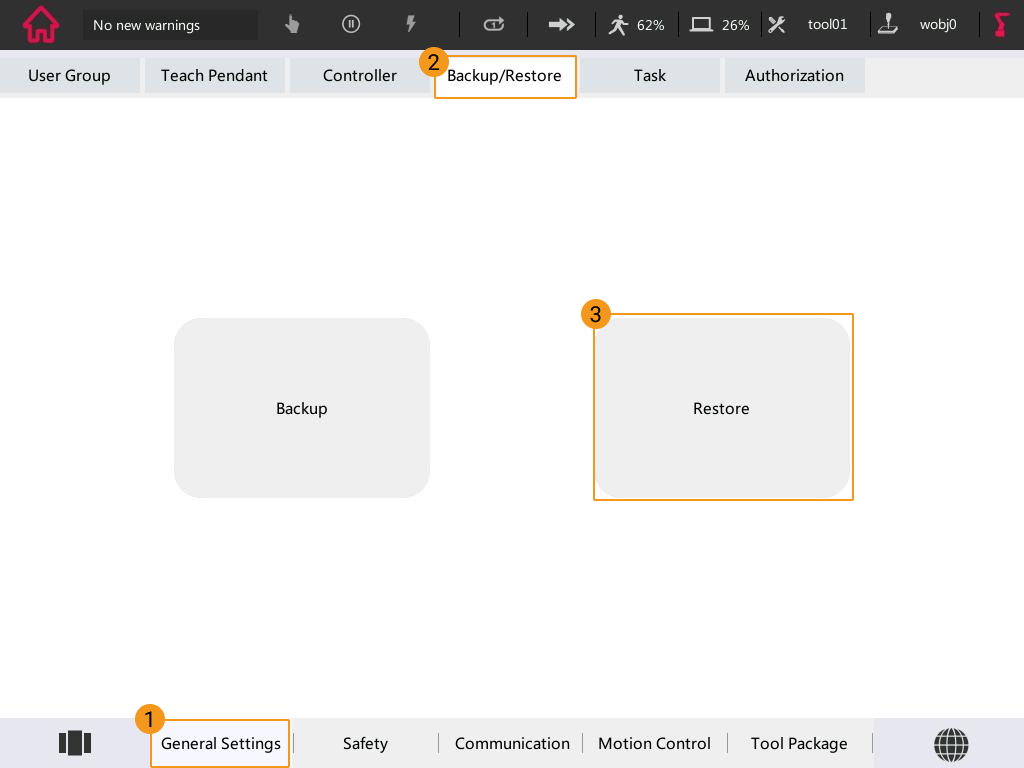
Sauvegarder et restaurer des fichiers du robot
Sauvegarde
-
Branchez la clé USB contenant les fichiers de programme dans le port USB sur le boîtier d’apprentissage.
-
Sur le boîtier d’apprentissage, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
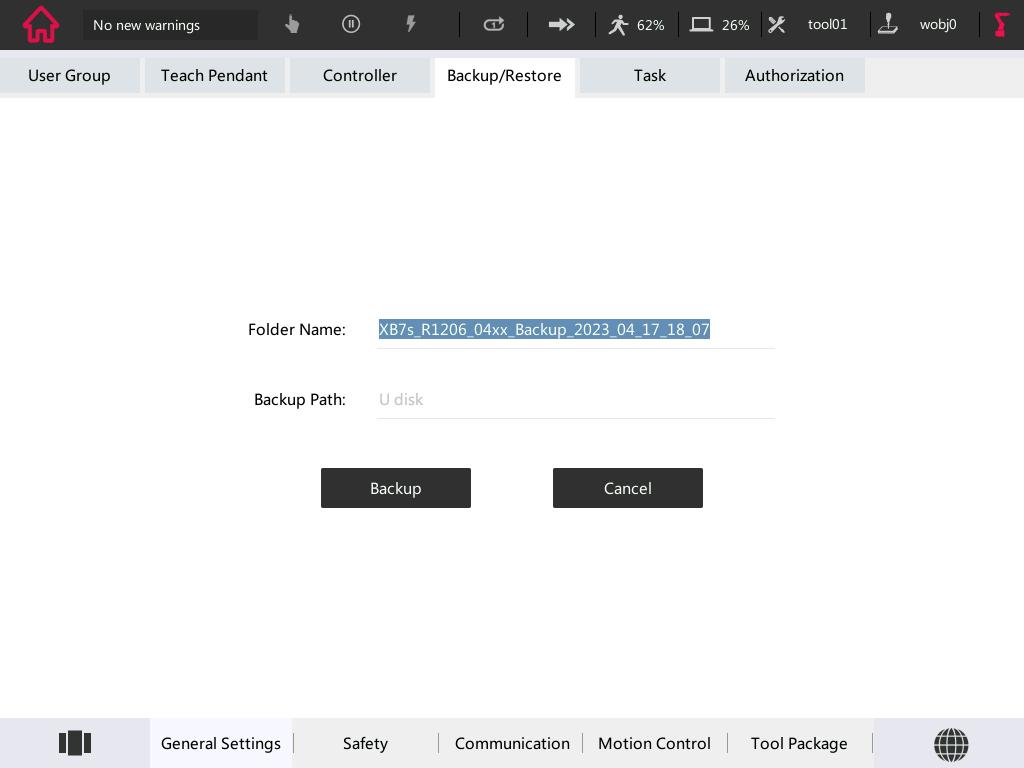
Appuyez sur , et sélectionnez Sauvegarde.
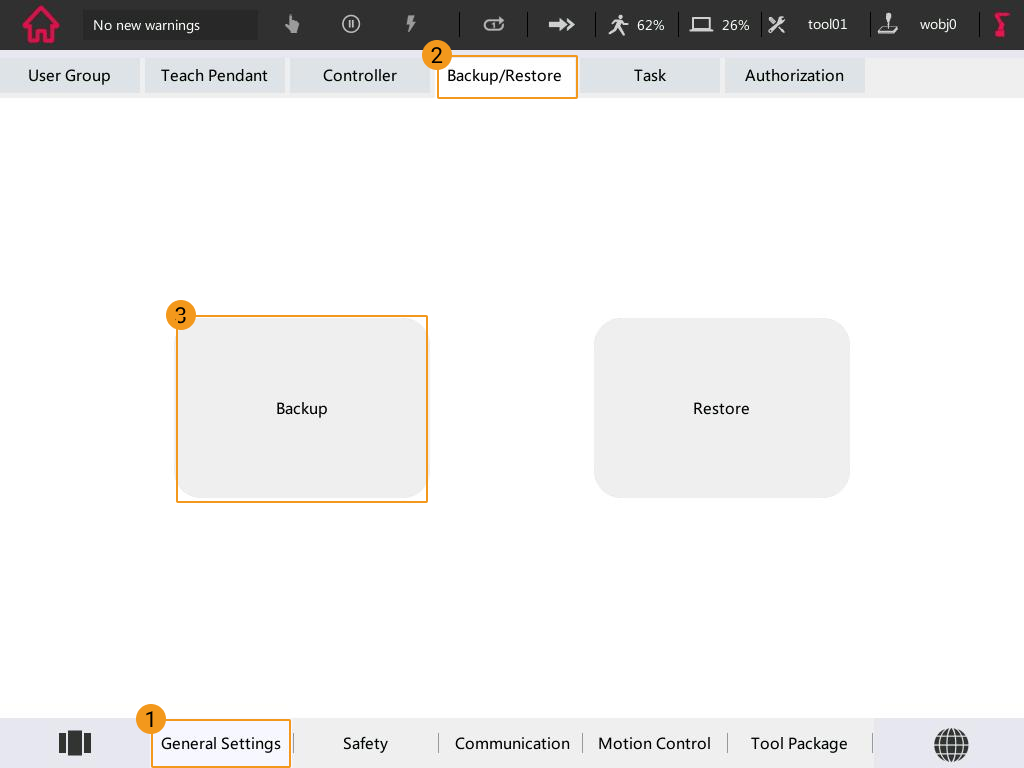
-
Sélectionnez Sauvegarde dans la fenêtre contextuelle.