Séquence d’appel des commandes de l’interface standard
Cette section présente la séquence d’appel et les relations entre les commandes de l’interface standard. Les séquences d’appel spécifiques des commandes pour le robot et pour le PLC sont présentées séparément.
Commandes appelées dans le programme du robot
Selon le type de projet, les commandes dans le programme du robot peuvent être divisées en deux catégories : commandes liées aux projets Mech-Vision et commandes liées aux projets Mech-Viz.
Commandes liées aux projets Mech-Vision
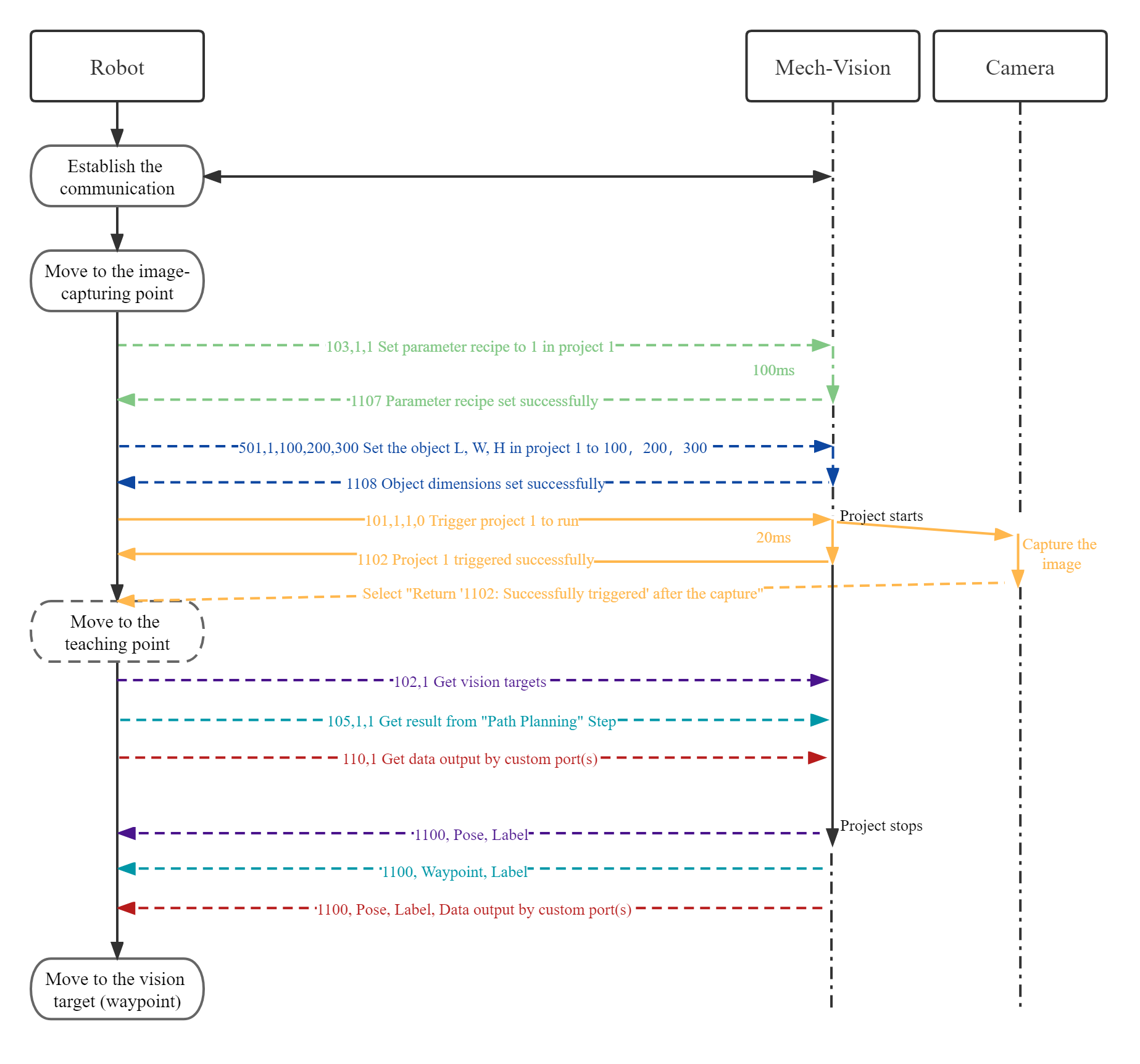
La séquence d’appel des commandes liées aux projets Mech-Vision est la suivante.
-
Commandes qui doivent être appelées AVANT la commande 101 (qui déclenche le projet Mech-Vision) :
-
Commande 103 : Basculer la recette de paramètres de Mech-Vision
-
Commande 501 : Entrer les dimensions de l’objet dans le projet Mech-Vision
-
-
Commande 101 : Déclencher le projet Mech-Vision
-
Commandes qui doivent être appelées APRÈS l’exécution duMech-Vision projet :
-
Commande 102 : Obtenir les résultats de vision
-
Commande 105 : Obtenir la trajectoire planifiée depuis Mech-Vision
-
Commande 110 : Obtenir des données de sortie personnalisées depuis Mech-Vision
Les commandes 102, 105 et 110 ne peuvent pas être utilisées simultanément.
-
Le diagramme de séquence temporelle des commandes liées au projet Mech-Vision est présenté ci-dessous. La ligne en pointillé indique que la commande est optionnelle et peut être appelée selon le besoin réel, tandis que la ligne pleine indique que la commande doit être appelée.
Commandes liées aux projets Mech-Viz
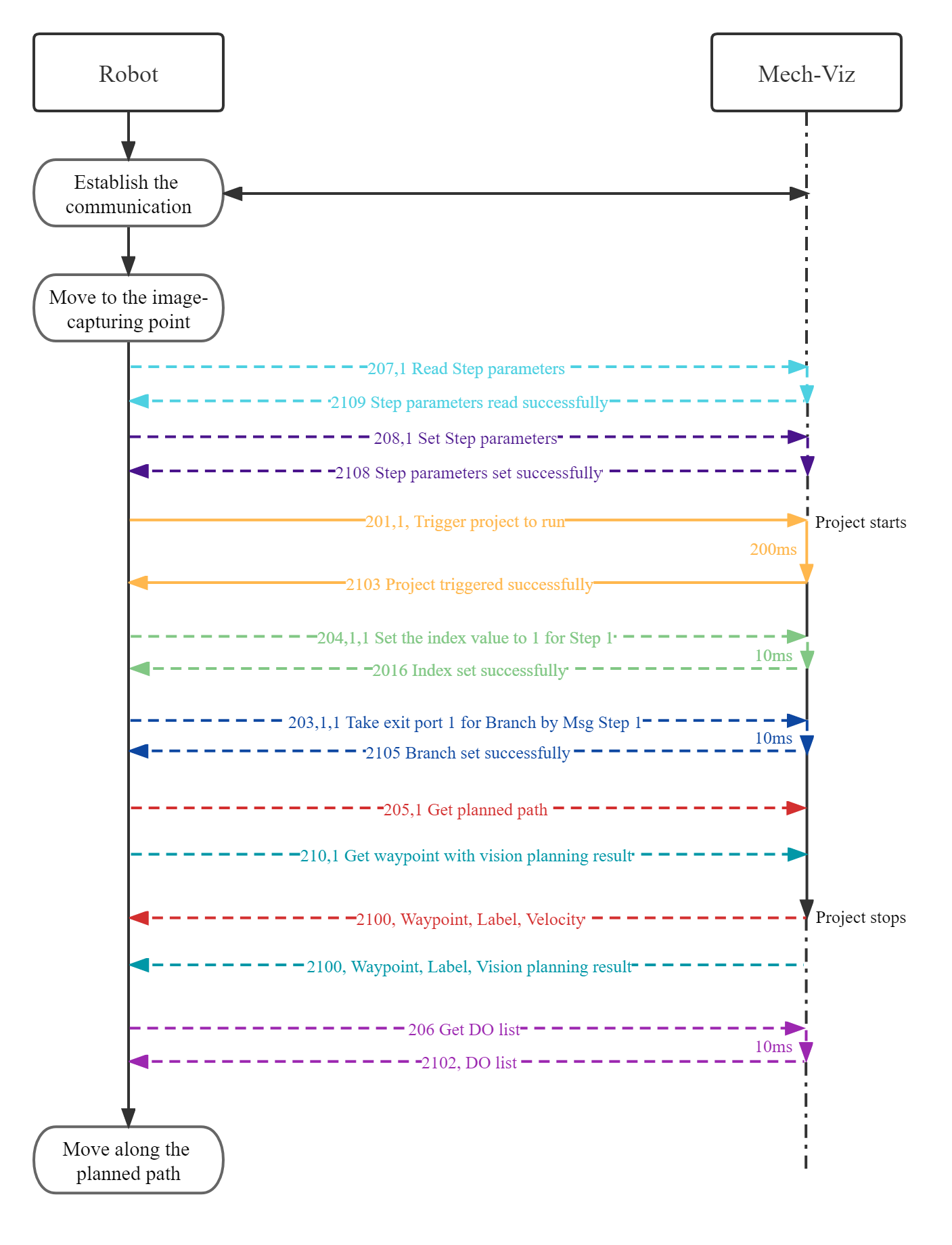
La séquence d’appel des commandes liées aux projets Mech-Viz est la suivante.
-
Commandes qui doivent être appelées AVANT que le projet Mech-Viz ne soit déclenché par la commande 201 :
-
Commande 207 : Lire le paramètre d’étape de Mech-Viz
-
Commande 208 : Définir le paramètre d’étape de Mech-Viz
-
-
Commande 201 : Déclencher le projet Mech-Viz
-
Commandes qui doivent être appelées PENDANT l’exécution du projet Mech-Viz :
-
Commande 204 : Définir l’index actuel pour Mech-Viz
-
Commande 203 : Définir le port de sortie pour l’étape Branch by Msg dans Mech-Viz
-
Commande 205 : Obtenir la trajectoire planifiée depuis Mech-Viz
-
Commande 210 : Obtenir les données de mouvement de vision ou des données de sortie personnalisées depuis Mech-Viz
-
La commande 204 et la commande 203 devraient être appelées avant la commande 205 et la commande 210.
-
Les commandes 205 et 210 ne peuvent pas être utilisées simultanément.
-
-
Commandes qui doivent être appelées APRÈS l’arrêt du projet Mech-Viz :
-
Commande 206 : Obtenir la liste des DO du préhenseur
-
Le diagramme de séquence temporelle des commandes liées au projet Mech-Viz est présenté ci-dessous. La ligne en pointillé indique que la commande est optionnelle et peut être appelée selon le besoin réel, tandis que la ligne pleine indique que la commande doit être appelée.
Commandes appelées dans le programme PLC
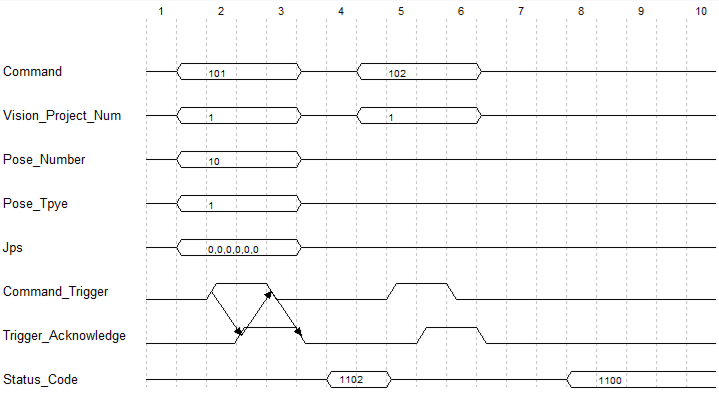
Le flux de travail du programme PLC pour appeler des commandes est illustré dans la figure ci-dessous.
Remarques:
-
Selon les exigences de chaque commande, le numéro de commande et les paramètres de commande seront écrits dans les registres correspondants. Par exemple, 101 sera écrit dans Command, et 1 (l’ID du projet) sera écrit dans Vision_Project_Num.
-
Lorsqu’une commande est déclenchée, le PLC définira la valeur de Command_Trigger à 1, et le système de vision lira le numéro de commande et les paramètres.
-
Après que le système de vision lit que Command_Trigger vaut 1, Trigger_Acknowledge sera réglé à 1.
-
Après que le PLC aura lu que Trigger_Acknowledge vaut 1, Command_Trigger sera réglé à 0, puis le numéro et les paramètres de la prochaine commande seront écrits dans les registres correspondants.
-
Après que le système de vision aura lu que Command_Trigger vaut 0, Trigger_Acknowledge sera réglé à 0.
Veuillez vous référer à Commandes liées aux projets Mech-Vision et Commandes liées aux projets Mech-Viz pour la séquence d’appel des commandes spécifiques.