Comment configurer l’adresse IP et le numéro de port dans la configuration de communication du robot ?
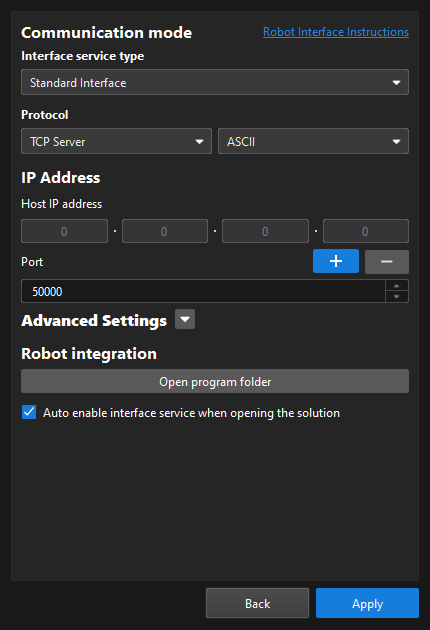
De nombreux utilisateurs ne sont pas familiers avec les adresses IP et les ports dans la configuration de communication du robot et ne savent pas quelle adresse IP de quel appareil saisir ni quel port utiliser. Ces paramètres sont illustrés dans la figure ci-dessous. Ce guide décrit les adresses IP et les ports dans la configuration de communication du robot. Le tableau suivant fournit les détails.
| Protocole | Rôle du système de vision | Adresse IP | Port |
|---|---|---|---|
Serveur TCP |
Serveur |
0.0.0.0 |
Un numéro personnalisé utilisé pour se connecter à des appareils externes tels que des robots ou des API. Le programme d’interface standard sur l’appareil externe nécessite l’adresse IP de l’IPC dans lequel le système de vision est installé et le numéro de port défini ici. |
Client API Siemens |
Client |
Adresse IP de l’API |
Aucun |
ETHERNET IP |
Serveur |
Aucune |
Aucun |
Esclave MODBUS TCP |
Serveur |
0.0.0.0 |
Un numéro personnalisé utilisé pour se connecter à des appareils externes tels que des robots ou des API. Le programme d’interface standard sur l’appareil externe nécessite l’adresse IP de l’IPC dans lequel le système de vision est installé et le numéro de port défini ici. |
Serveur UDP |
Pas besoin d’utiliser un rôle |
0.0.0.0 |
Un numéro personnalisé utilisé pour se connecter à des appareils externes tels que des robots ou des API. Le programme d’interface standard sur l’appareil externe nécessite l’adresse IP de l’IPC dans lequel le système de vision est installé et le numéro de port défini ici. |
Client Mitsubishi MC |
Client |
Adresse IP de l’API |
Port de l’API |
| Guide connexe : Pourquoi définir l’adresse IP de l’hôte sur 0.0.0.0 lorsque le système de vision agit en tant que serveur ? |