Programme d’exemple 11 : MM_S11_Viz_Timer
Présentation du programme
Description |
Le robot utilise un minuteur pour calculer le temps nécessaire entre l’établissement de la communication et l’achèvement, à chaque cycle, des opérations de prise et de dépose. |
Chemin du fichier |
Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin |
Projet |
Projets Mech-Vision et Mech-Viz |
Prérequis |
|
| Ce programme d’exemple est fourni uniquement à titre de référence. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette partie décrit le programme d’exemple MM_S11_Viz_Timer.
| La seule différence entre le programme d’exemple MM_S11_Viz_Timer et le programme d’exemple MM_S2_Viz_Basic est que MM_S11_Viz_Timer peut utiliser un minuteur pour calculer le temps requis (le code de cette fonctionnalité est en gras). Par conséquent, les fonctionnalités du programme MM_S11_Viz_Timer similaires à celles de MM_S2_Viz_Basic ne sont pas décrites dans cette partie. Pour plus d’informations sur ces fonctionnalités, voir Programme d’exemple 2 : MM_S2_Viz_Basic. |
DEF MM_S11_Viz_Timer ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Viz project and get
; planned path, add a timer to record cycle time
; Mech-Mind, 2023-12-25
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
PTP HOME Vel=100 % DEFAULT
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
LOOP
;reset timer to 0
$TIMER[1] = 0
;start timer
$TIMER_STOP[1] = FALSE
;move to image-capturing position
LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0]
;trigger Mech-Viz project
MM_Start_Viz(2,init_jps)
;get planned path, 1st argument (1) means getting pose in JPs
MM_Get_VizData(1,pos_num,vis_pos_num,status)
;check whether planned path has been got from Mech-Viz successfully
IF status<> 2100 THEN
;add error handling logic here according to different error codes
;e.g.: status=2038 means no point cloud in ROI
halt
ENDIF
;save waypoints of the planned path to local variables one by one
MM_Get_Jps(1,Xpick_point1,label[1],toolid[1])
MM_Get_Jps(2,Xpick_point2,label[2],toolid[2])
MM_Get_Jps(3,Xpick_point3,label[3],toolid[3])
;follow the planned path to pick
;move to approach waypoint of picking
PTP pick_point1 Vel=50 % PDAT1 Tool[1] Base[0]
;move to picking waypoint
PTP pick_point2 Vel=10 % PDAT2 Tool[1] Base[0]
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
PTP pick_point3 Vel=50 % PDAT3 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
;move to approach waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move to placing waypoint
LIN drop Vel=0.3 m/s CPDAT4 Tool[1] Base[0]
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move back to robot home position
PTP HOME Vel=100 % DEFAULT
$TIMER_STOP[1] = TRUE
offset = 0
SWRITE(str_tmp[], state, offset,"time: %d ms", $TIMER[1])
MM_LOG(str_tmp[])
ENDLOOP
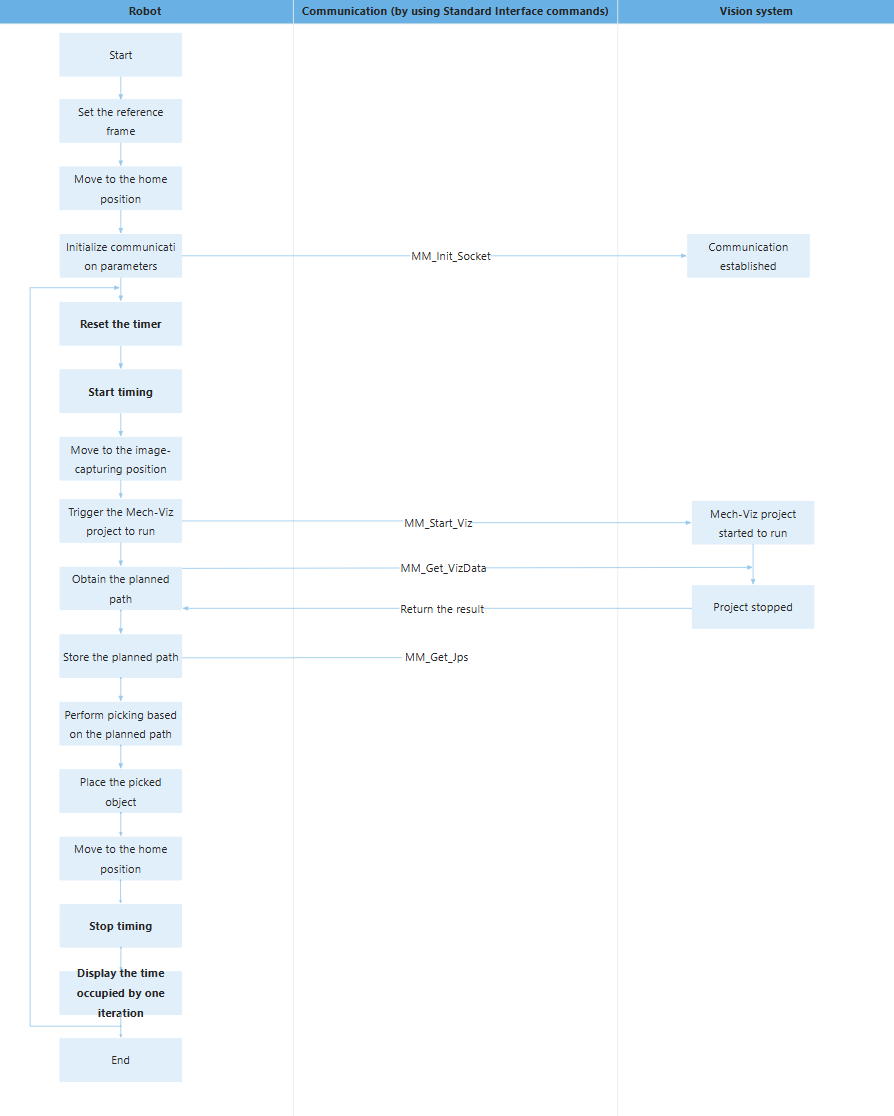
ENDLe flux de travail correspondant au code de programme d’exemple ci-dessus est illustré dans la figure ci-dessous.
Le tableau ci-dessous décrit la fonctionnalité d’utilisation d’un minuteur pour calculer le temps requis.
| Fonctionnalité | Code et description |
|---|---|
Calculer, par bouclage, le temps écoulé entre l’établissement de la communication et l’achèvement des opérations de prise et de dépose à chaque cycle |
Le code ci-dessus indique que le programme boucle sur les instructions comprises entre LOOP et ENDLOOP. Le code ci-dessus définit $TIMER[1] sur 0 ms. Le code ci-dessus lance l’exécution de $TIMER[1]. Le code ci-dessus arrête $TIMER[1].
Le code ci-dessus indique que la commande SWRITE écrit le temps calculé par le minuteur $TIMER[1] dans le tableau str_tmp[] au format « temps : %d ms ». Le code ci-dessus affiche le temps calculé sur l’écran du pupitre de commande. |