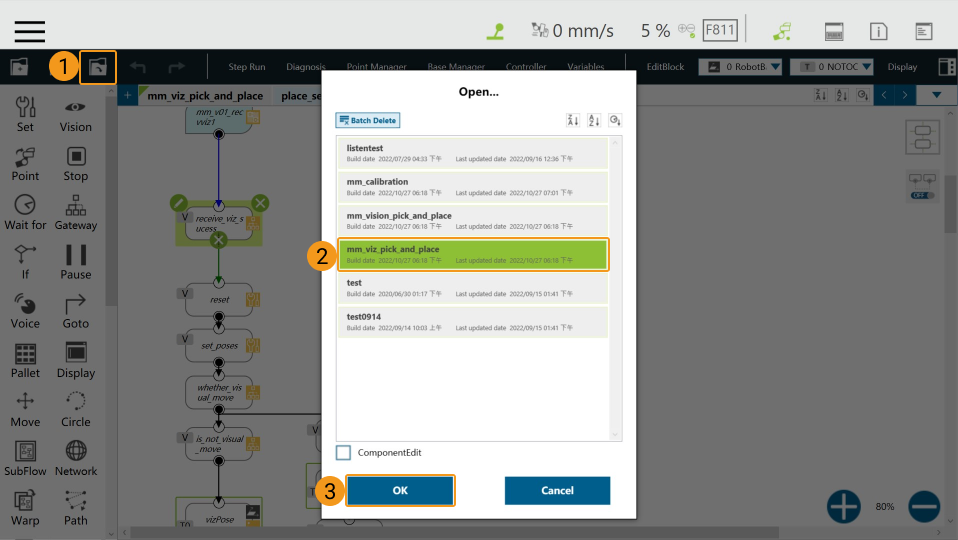
mm_viz_pick_and_place
Ce programme déclenche le démarrage de Mech-Viz et guide le robot pour accomplir une tâche simple de prise et dépose. Il s’applique aux scénarios où un résultat de vision guide la prise une ou plusieurs fois.
Configurations
Configuration des points
Vous pouvez définir les points dans Point Manager:
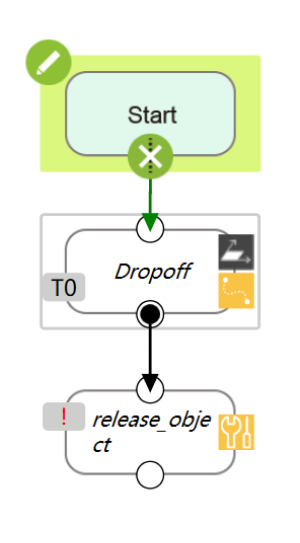
vizPose est le point calculé selon la trajectoire planifiée de Mech-Viz.
Dropoff est le point enseigné par l’utilisateur, où le robot dépose l’objet.
Configuration des paramètres
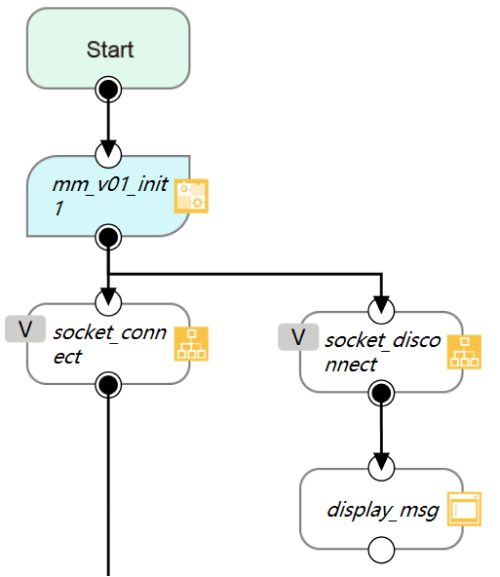
Composant MM init
Le paramétrage réseau dans le programme est défini par MM init. Vous pouvez configurer l’adresse IP, c’est‑à‑dire l’adresse IP de l’IPC, dans ce composant.
Veuillez vous référer à Configurer l’adresse IP de l’IPC pour modifier l’adresse IP de MM init.
Composant Run Viz
Vous devrez configurer manuellement le paramètre qui déclenche Mech-Viz à démarrer. Veuillez cliquer sur l’icône ![]() dans le coin supérieur gauche du composant Run Viz pour configurer.
dans le coin supérieur gauche du composant Run Viz pour configurer.
Pour des instructions détaillées sur la configuration des paramètres, veuillez vous référer à Démarrer le projet Mech-Viz (Run Viz).
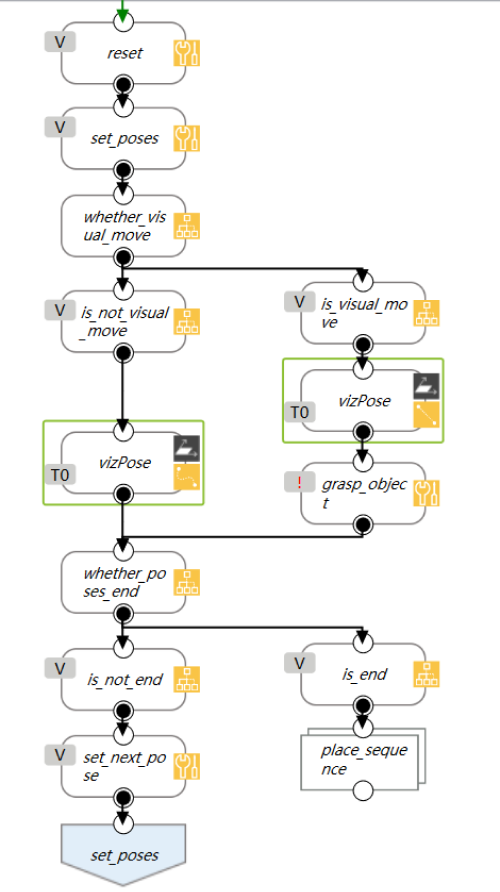
Programme principal
Tout d’abord, le composant MM init est ajouté après le nœud Start pour établir la communication. Vous pouvez modifier l’adresse IP dans le composant MM init. Veuillez vous assurer que le robot et l’IPC sont sur le même sous‑réseau.
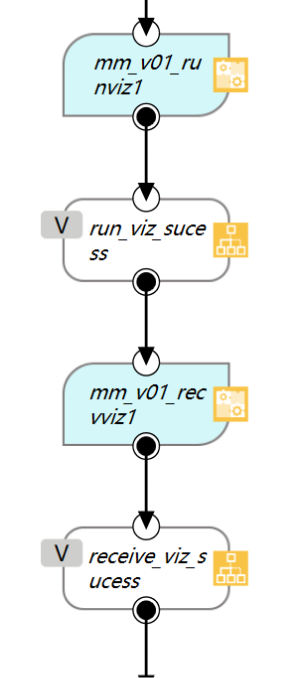
Ensuite, le composant Run Viz est ajouté pour démarrer Mech-Viz. Vous pouvez configurer des paramètres pour déclencher le démarrage de Mech-Viz, basculer la branche et définir le Current Index.
Ensuite, le composant Receive Viz est ajouté pour obtenir la trajectoire planifiée depuis Mech-Viz. Les résultats renvoyés par Mech-Viz seront stockés dans la variable globale g_mm_socket_recv_array sous forme de chaînes.
Les résultats reçus de Mech-Viz seront utilisés pour affecter des valeurs à vizPose. Le programme déterminera si le résultat reçu correspond à une « Étape de déplacement par vision ». S’il s’agit d’une « Étape de déplacement par vision », le robot se déplacera vers le point de passage en mode de mouvement linéaire ; sinon, le robot se déplacera vers le point de passage en type de mouvement Point to Point, puis commencera à saisir l’objet.
De même, le nœud grasp_object ne peut pas être exécuté directement. Vous devez en modifier les paramètres pour commander la fermeture de la pince.
Ensuite, le programme détermine si tous les points de passage fournis par Mech-Viz ont été atteints. Si le robot s’est déplacé vers tous les points de passage, il sera guidé par place_sequence et commencera à déposer l’objet. Dans cet exemple, vous devrez définir le point Dropoff dans place_sequence et Mech-Viz n’a pas besoin d’exporter des points pour la dépose.