ESTUN Étalonnage automatique
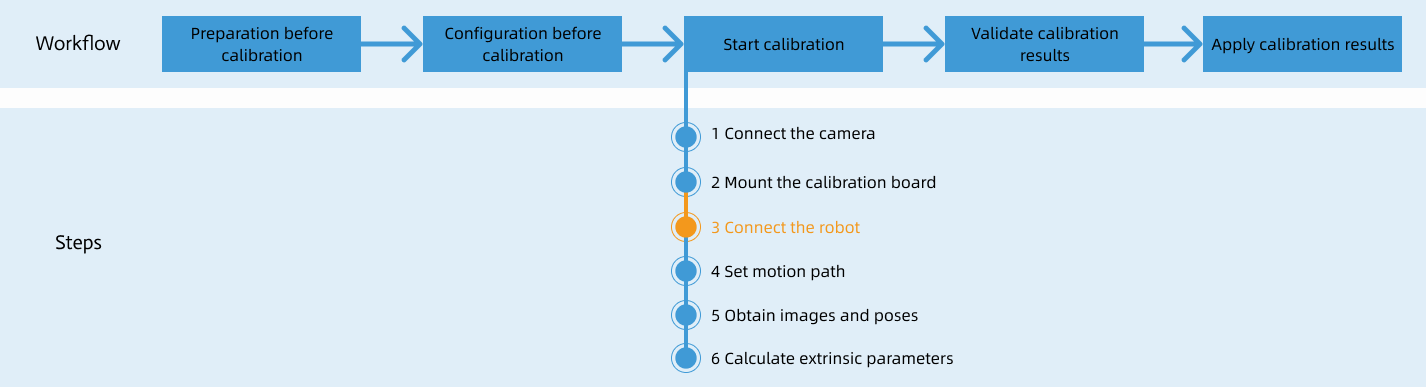
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner et modifier le programme d’étalonnage
-
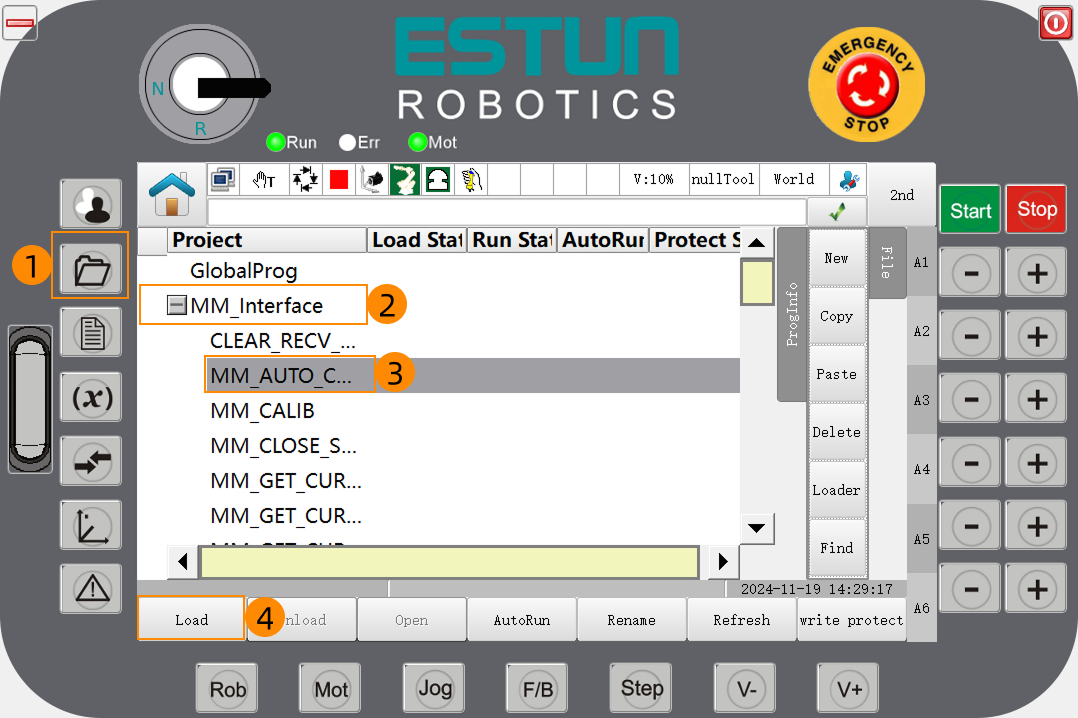
En mode apprentissage, appuyez sur le bouton Dossier du boîtier d’enseignement, développez MM_Interface, sélectionnez MM_AUTO_CALIBRATION, et touchez Charger pour ouvrir le fichier programme.
-
Dans le fichier programme ouvert, vérifiez la valeur de P:PORT.value (cette valeur doit correspondre au numéro de port hôte défini dans Mech-Vision). Ensuite, vérifiez les valeurs de P:IP.value[1]~P:IP.value[4] (ces quatre valeurs doivent correspondre aux quatre segments de l’adresse IP de l’IPC).
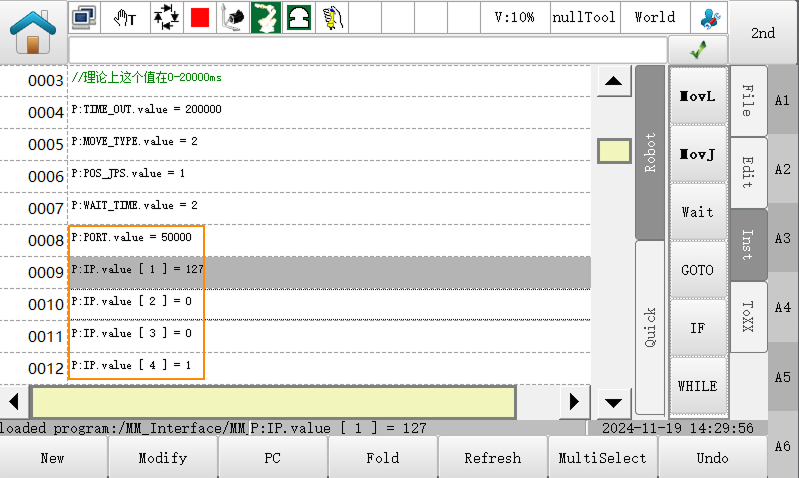
Si vous devez modifier ces valeurs, reportez-vous à l’exemple suivant. L’exemple ci-dessous montre comment changer 127 en 192 à la ligne 9.
-
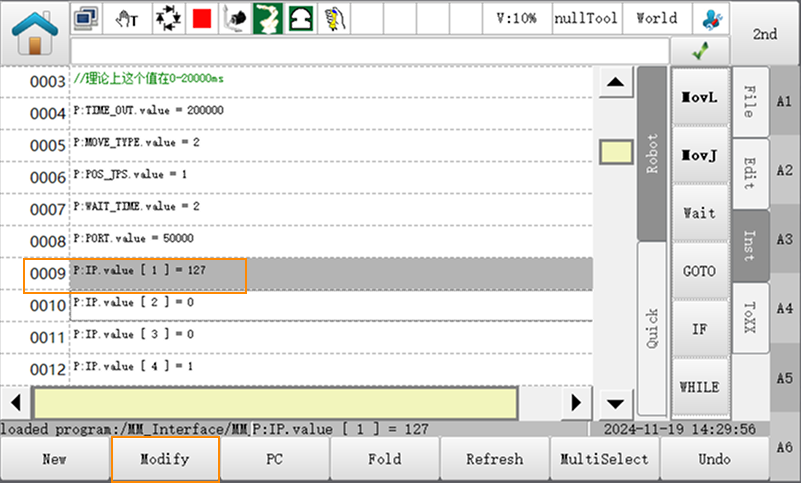
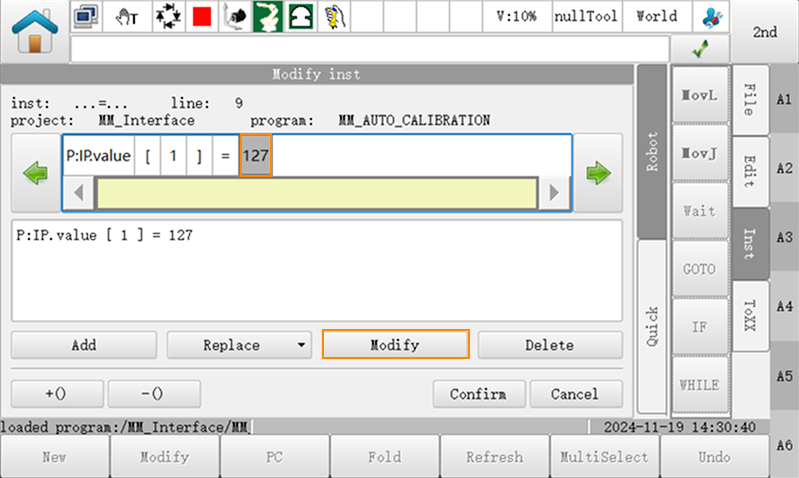
Sélectionnez la ligne 9 et touchez Modifier.
-
Placez le curseur sur 127 et touchez Modifier.
-
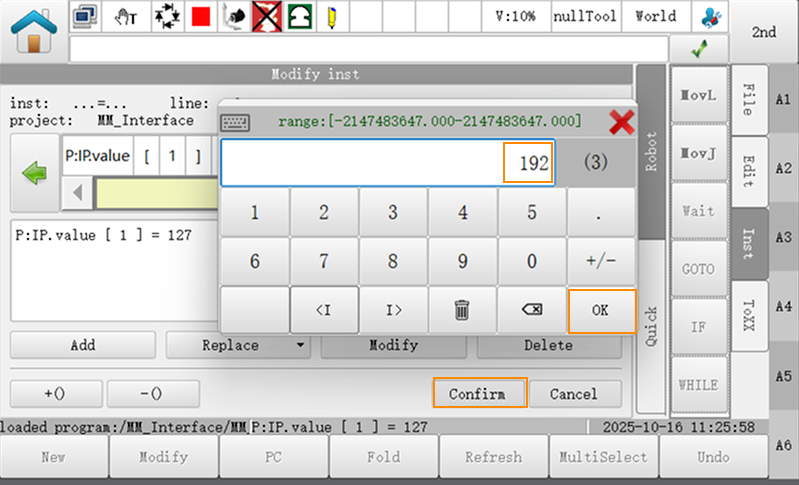
Saisissez 192, puis touchez dans l’ordre.
-
-
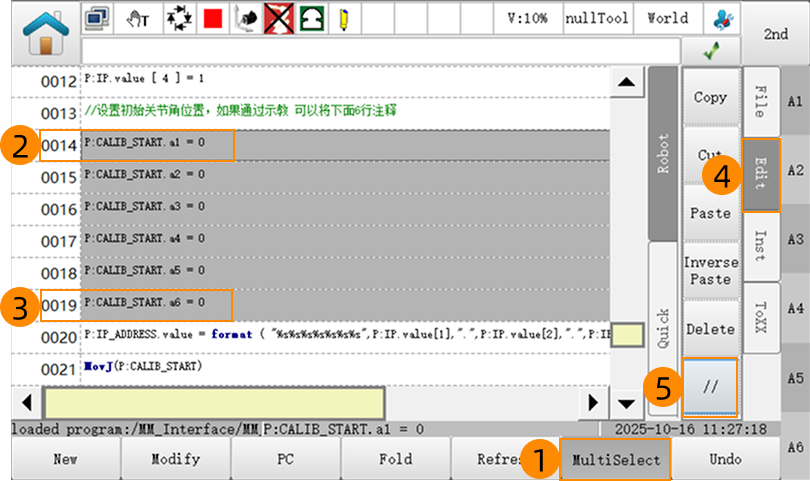
Commentez les lignes de code où les positions initiales des articulations sont définies. Procédez comme suit:
-
Touchez MultiSelect, puis touchez la ligne 14, et ensuite la ligne 19 pour sélectionner les lignes 14 à 19.
-
Touchez dans le panneau de droite pour commenter les lignes 14 à 19. Les lignes s’afficheront en police verte, indiquant que la mise en commentaire a réussi.
-
2. Apprendre le point de départ de l’étalonnage
-
En mode manuel, déplacez le robot jusqu’au point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
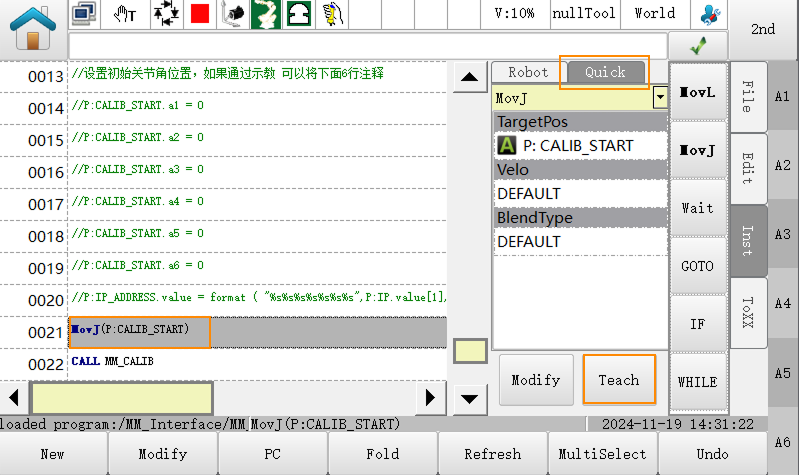
Sélectionnez la ligne MMovJ(P:CALIB_START), allez à l’onglet Rapide, touchez Apprendre, et confirmez pour poursuivre l’apprentissage.
3. Exécuter le programme d’étalonnage
-
Tournez l’interrupteur à clé sur le boîtier d’enseignement en position A pour passer en mode Auto.

-
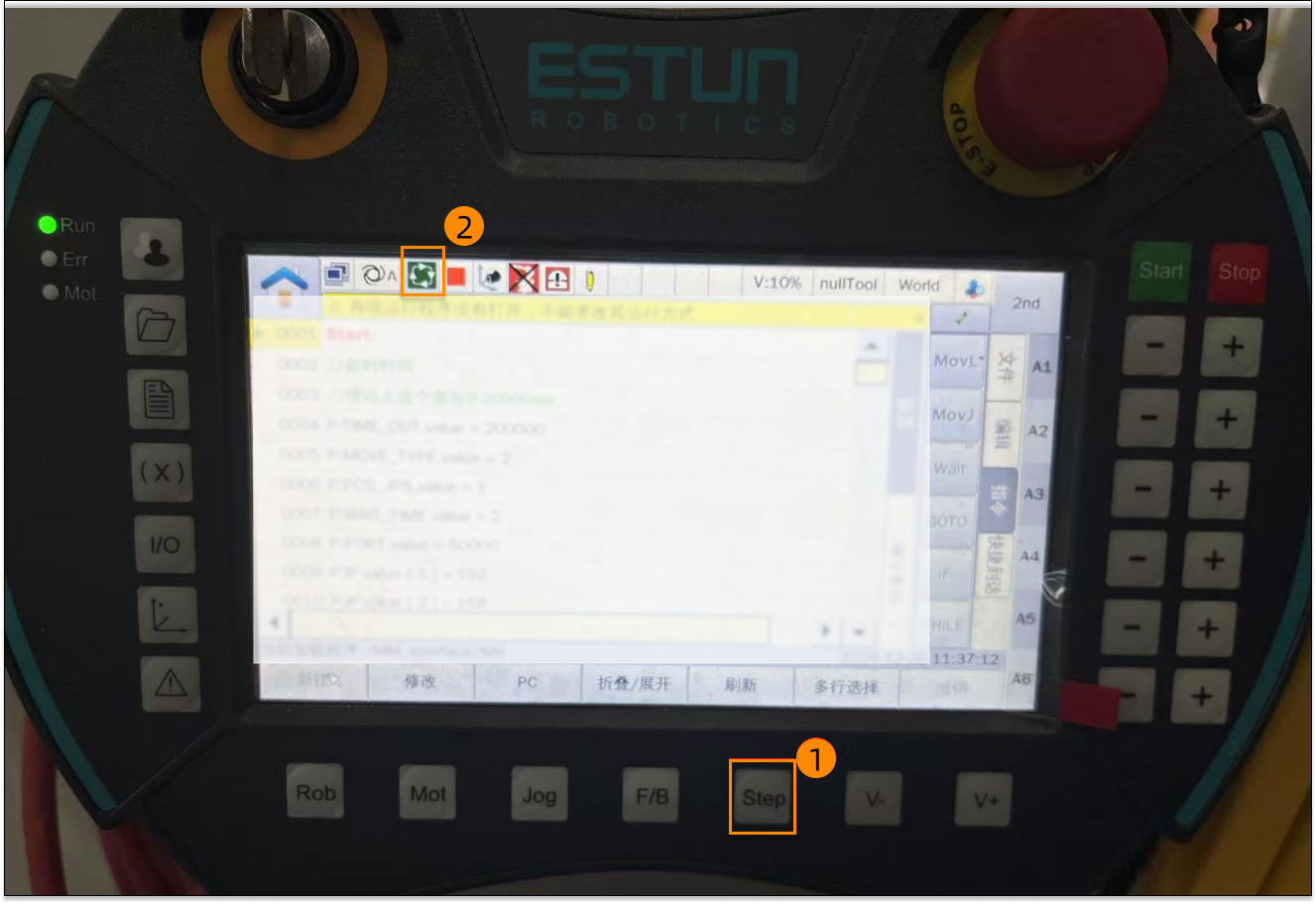
Appuyez sur le bouton Step (position 1 sur la figure) et confirmez que le programme est en mode d’exécution continue (position 2 sur la figure).
-
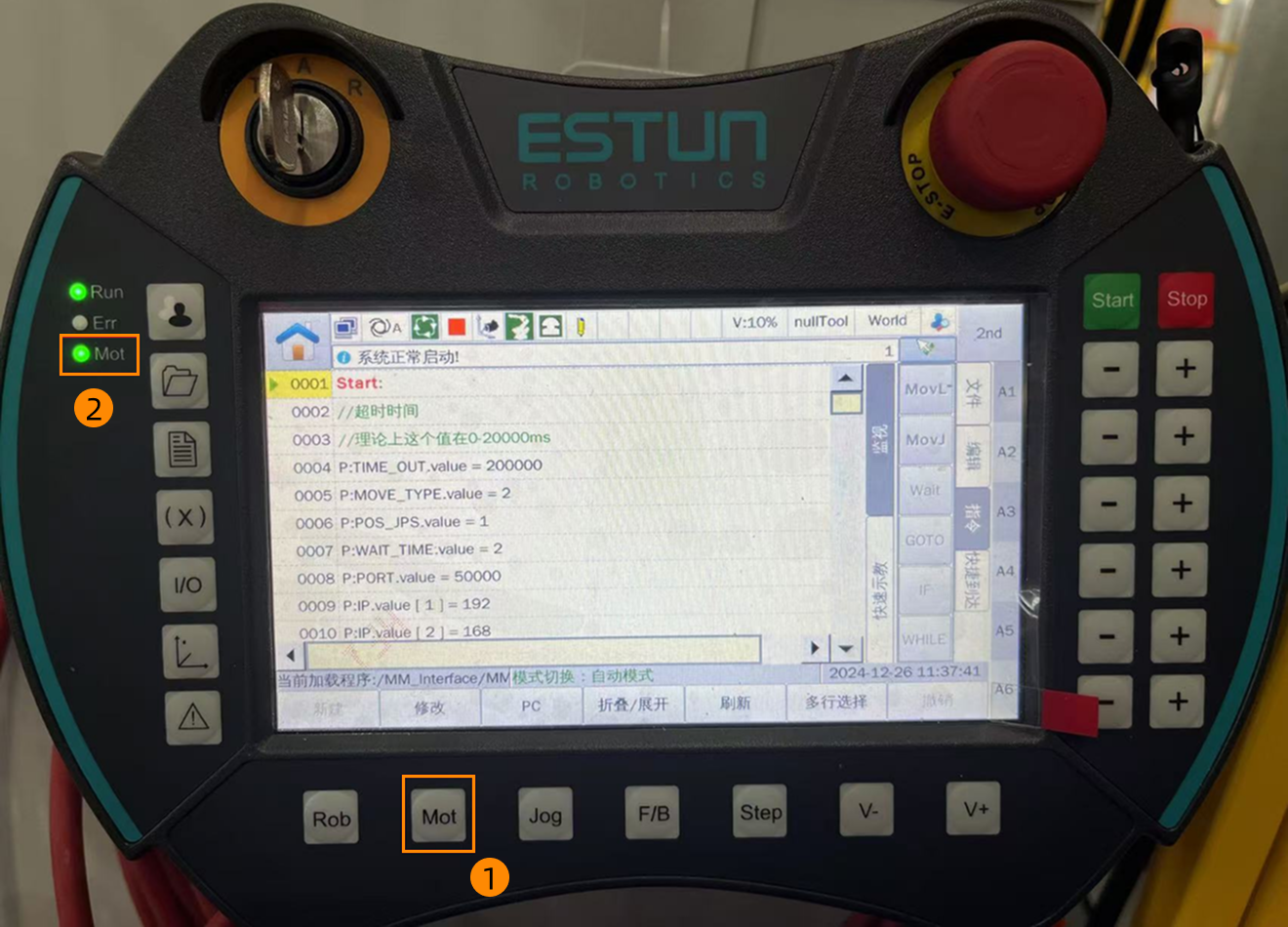
Appuyez sur le bouton Mot (position 1 sur la figure) et confirmez que le voyant d’activation (position 2 sur la figure) est allumé.
-
Appuyez sur le bouton Start pour exécuter le programme.

-
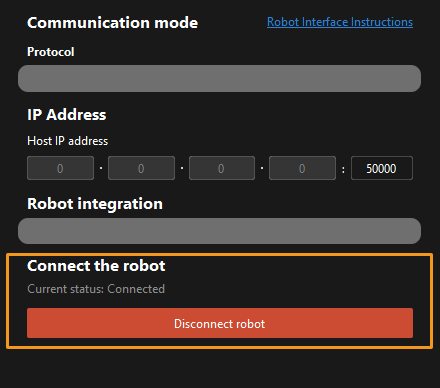
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-