Codes d’état et dépannage
Aperçu
Les codes d’état dans les commandes de l’Interface standard renvoyées par le système de vision sont des nombres à 4 chiffres qui représentent l’état de l’exécution des commandes. Les codes d’état sont divisés en codes d’état normaux et codes d’erreur. Les codes d’état normaux indiquent que la commande s’est exécutée avec succès, tandis que les codes d’erreur indiquent qu’une erreur s’est produite pendant l’exécution de la commande. Vous pouvez résoudre les erreurs en vous référant aux descriptions des codes d’erreur dans ce guide. Le tableau suivant classe les codes d’état en différentes catégories.
| Code d’état | Description |
|---|---|
1001-1099 |
|
1100-1199 |
|
2001-2099 |
|
2100-2199 |
|
3001-3099 |
|
3100-3199 |
|
4001-4099 |
|
4100-4199 |
Codes d’état normaux du robot |
7001-7099 |
|
6001~6199 |
Codes d’état personnalisables dans Mech-Vision |
7100-7199 |
Mech-Vision
Codes d’erreur de Mech-Vision
| Code d’erreur | Description |
|---|---|
Mech-Vision: Projet non enregistré présent dans la solution |
|
Mech-Vision: Aucun résultat de vision |
|
Mech-Vision: Aucun nuage de points dans la ROI |
|
Mech-Vision: Paramètre de commande invalide pour démarrer le projet Mech-Vision |
|
Mech-Vision: Données de pose invalides |
|
Mech-Vision: Le projet est en cours d’exécution |
|
Mech-Vision: Liste des signaux de sortie numérique non fournie |
|
Mech-Vision: Le nombre de poses et le nombre d’étiquettes ne correspondent pas |
|
Mech-Vision: ID de projet inexistant |
|
Mech-Vision: ID de recette de paramètres inexistant |
|
Mech-Vision: Recette de paramètres non configurée |
|
Mech-Vision: Échec du changement de recette de paramètres |
|
Mech-Vision: Erreur d’exécution du projet |
|
Mech-Vision: Les données obtenues par la commande ne correspondent pas à la valeur Port Type de l’Output Step. Veuillez sélectionner une commande appropriée ou modifier la valeur Port Type |
|
Mech-Vision: Échec du mappage de la chaîne d’étiquettes vers des nombres |
|
Mech-Vision: Nombre de poses en entrée invalide |
|
Mech-Vision: Dépassement de délai d’exécution |
|
Mech-Vision: Projet non démarré |
|
Mech-Vision: Échec de la définition des dimensions de l’objet |
|
Mech-Vision: Paramètres de dimensions de l’objet invalides |
|
Mech-Vision: Échec de la connexion à la caméra |
|
Mech-Vision: Le nombre de poses et la taille de la liste des données du port personnalisé ne correspondent pas |
|
Mech-Vision: Données d’image visuelle en cours d’utilisation. L’exécution ne peut pas continuer |
|
Mech-Vision: Type de pose invalide |
|
Mech-Vision: Erreur d’exécution à l’étape Path Planning |
|
Mech-Vision: Le robot ne peut pas atteindre le point de passage |
|
Mech-Vision: Erreur de singularité de mouvement |
|
Mech-Vision: Point de prise invalide |
|
Mech-Vision: Collision du robot détectée |
|
Mech-Vision: Aucune position de dépose disponible pour la palettisation |
|
Mech-Vision: Aucun point de vision pour l’étape Vision Move |
|
Mech-Vision: Outil invalide |
|
Mech-Vision: Dépassement de délai lors de l’attente de la fin de la capture |
|
Mech-Vision: Erreur de reconnaissance du masque de boîte |
|
Mech-Vision: Erreur de vérification des dimensions de la boîte |
|
Mech-Vision: Échec de la définition de la pose |
Codes d’état normaux de Mech-Vision
| Code d’état normal | Description |
|---|---|
1100 |
Mech-Vision: Obtention du résultat de vision réussie |
1101 |
Mech-Vision: Prêt à exécuter |
1102 |
Mech-Vision: Projet déclenché avec succès |
1103 |
Mech-Vision: Trajectoire planifiée obtenue avec succès |
1106 |
Mech-Vision: Liste des signaux DO obtenue avec succès |
1107 |
Mech-Vision: Recette de paramètres changée avec succès |
1108 |
Mech-Vision: Dimensions de l’objet saisies dans le projet avec succès |
1110 |
Mech-Vision: Pose définie avec succès |
Mech-Viz
Codes d’erreur de Mech-Viz
| Code d’erreur | Description |
|---|---|
Mech-Viz: Logiciel non enregistré |
|
Mech-Viz: Le projet est en cours d’exécution |
|
Mech-Viz: Le robot ne peut pas atteindre le point de passage |
|
Mech-Viz: Paramètre de commande invalide pour démarrer Mech-Viz // |
|
Mech-Viz: Erreur d’exécution |
|
Mech-Viz: Liste des signaux de sortie numérique non fournie |
|
Mech-Viz: Type de pose invalide |
|
Mech-Viz: Données de pose invalides |
|
Mech-Viz: Aucun projet défini pour le chargement automatique |
|
Mech-Viz: Échec de la définition de la valeur du paramètre de l’étape |
|
Mech-Viz: Échec de l’arrêt de l’exécution |
|
Mech-Viz: Numéro de port de sortie de branche invalide |
|
Mech-Viz: Échec de la définition de la branche |
|
Mech-Viz: Erreur de singularité de mouvement |
|
Mech-Viz: Le projet n’a pas été exécuté ou n’a aucun résultat après exécution |
|
Mech-Viz: ID d’étape de branche invalide |
|
Mech-Viz: Dépassement de délai d’exécution |
|
Mech-Viz: ID d’étape invalide pour les étapes de type index |
|
Mech-Viz: Valeur de Current Index invalide |
|
Mech-Viz: Échec de la définition de l’index |
|
Mech-Viz: Point de prise invalide |
|
Mech-Viz: Collision du robot détectée |
|
Mech-Viz: Aucune position de dépose disponible pour la palettisation |
|
Mech-Viz: Étape de reconnaissance visuelle non appelée |
|
Mech-Viz: Aucun résultat de vision reçu du service de vision |
|
Mech-Viz: Aucun nuage de points dans la ROI |
|
Mech-Viz: Aucun point de vision pour l’étape Vision Move |
|
Mech-Viz: Échec de l’obtention du paramètre de l’étape |
|
Mech-Viz: Échec de l’obtention du résultat de planification dans Vision Move |
|
Mech-Viz: Échec de l’obtention des données personnalisées |
|
Mech-Viz: Service de vision non enregistré |
|
Mech-Viz: Outil invalide |
Codes d’état normaux de Mech-Viz
| Code d’état normal | Description |
|---|---|
2100 |
Mech-Viz: Exécution terminée avec succès |
2102 |
Mech-Viz: Liste des signaux DO obtenue avec succès |
2103 |
Mech-Viz: Démarré avec succès |
2104 |
Mech-Viz: Arrêté avec succès |
2105 |
Mech-Viz: Définition de la branche réussie |
2106 |
Mech-Viz: Définition de l’index réussie |
2107 |
Mech-Viz: Définition du point de mouvement pour l’étape External Move réussie |
2108 |
Mech-Viz: Définition de la valeur du paramètre de l’étape réussie |
2109 |
Mech-Viz: Lecture de la valeur du paramètre de l’étape réussie |
Composant de communication
Codes d’erreur du composant de communication
| Code d’erreur | Description |
|---|---|
Composant de communication: Commande invalide |
|
Composant de communication: Longueur de données ou format invalide pour le paramètre de commande |
|
Composant de communication: Mech-Vision a dépassé le délai |
|
Composant de communication: Erreur inconnue |
|
Composant de communication: Dépassement de délai du signal d’accusé de réception des données |
|
Composant de communication: L’ID de configuration n’existe pas |
Étalonnage
Dépannage de Mech-Vision
1001
Mech-Vision: Projet non enregistré présent dans la solution
Cause:
-
Mech-Vision n’a pas été démarré.
Solution:
-
Assurez-vous que le logiciel Mech-Vision est démarré.
1002
Mech-Vision: Aucun résultat de vision
Cause:
-
Le projet Mech-Vision s’est exécuté avec succès, mais les ports de l’Output Step n’ont pas réussi à émettre des données. Les raisons possibles incluent un seuil de confiance excessivement élevé pour la segmentation d’instance, aucun objet correspondant dans la scène, des paramètres de ROI inappropriés, une faible qualité du nuage de points, des paramètres de filtrage inadaptés, etc.
Solution:
-
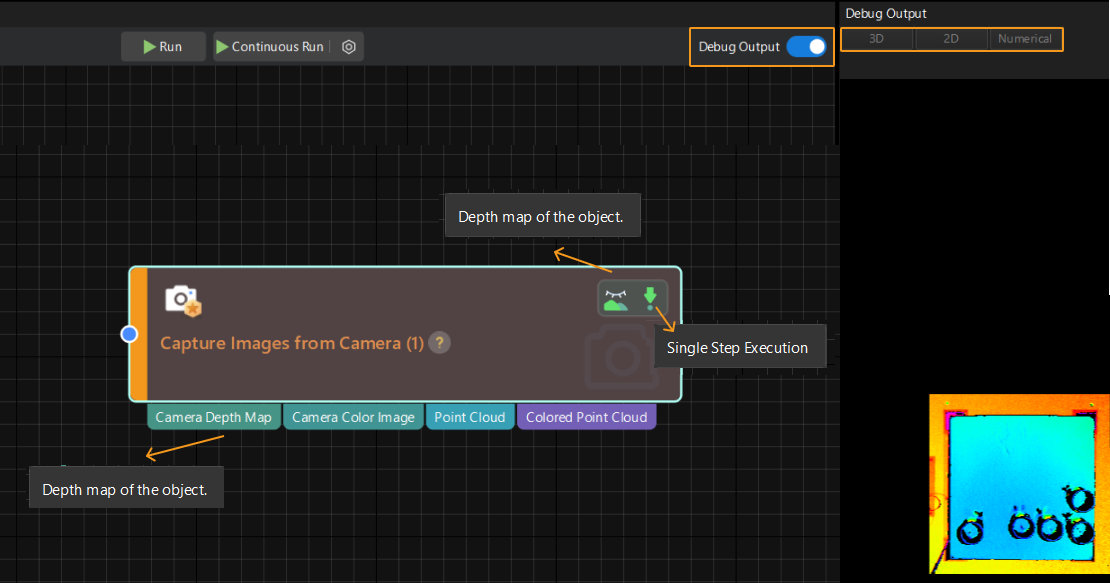
Activer la sortie de débogage: Ouvrez Mech-Vision, activez l’interrupteur Sortie de débogage, cliquez sur Exécuter ou Exécution pas à pas, double-cliquez pour connecter les étapes, puis consultez la sortie détaillée dans la fenêtre de Sortie de débogage à droite.
-
Localiser l’étape problématique: Commencez par la première étape et vérifiez séquentiellement le flux de données de chaque port de l’étape de haut en bas. Si le flux de données d’une étape est anormal, l’étape est problématique.
-
Vérifier les paramètres de l’étape problématique: Assurez-vous que toutes les étapes nécessaires sont correctement configurées et que les données peuvent s’écouler naturellement.
Les paramètres des étapes suivantes sont essentiels pour la sortie. Si le projet contient les étapes suivantes, prêtez attention aux valeurs des paramètres des étapes.
-
Extract 3D Points in 3D ROI: Dans la section Paramètres de ROI 3D, cliquez sur Ouvrir l’éditeur et assurez-vous que le nuage de points de l’objet cible se trouve dans la boîte verte.
-
3D Matching: Ajustez la valeur Seuil de confiance en vous basant sur le résultat d’appariement dans la sortie visualisée et la situation réelle.
-
Si le seuil de confiance est défini sur une valeur élevée, telle que 0,9 ou plus, l’objet détecté ne sera marqué comme une correspondance valide que lorsque le modèle est très précis dans ses résultats de détection. Dans ce cas, il est conseillé d’abaisser le seuil de confiance à un niveau plus approprié, tel que 0,5 ou 0,6, pour équilibrer le risque de détections manquées.
-
Si l’ajustement du seuil de confiance ne donne pas de résultats satisfaisants, il est nécessaire d’utiliser un jeu de données plus diversifié et plus difficile lors de l’entraînement du modèle pour rendre la segmentation d’instance applicable à davantage de scénarios.
-
-
1003
Mech-Vision: Aucun nuage de points dans la ROI
Cause:
-
Il n’y avait aucun nuage de points dans la ROI 3D.
| Cette erreur peut indiquer que le bac est vide ou mal positionné. Ce n’est donc pas nécessairement une erreur d’exécution de projet qui doit être corrigée. |
Solution:
-
Vérifiez le réglage de la ROI dans le projet et assurez-vous que le paramétrage est approprié.
1005
Mech-Vision: Paramètre de commande invalide pour démarrer le projet Mech-Vision
Cause:
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Vision, la valeur du paramètre du type de pose du robot était invalide. La plage de valeurs du paramètre de type de pose du robot est de 0 à 3.
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Vision et obtenir des résultats, la valeur du paramètre de format des données renvoyées était invalide. La plage de valeurs du format des données renvoyées est de 1 à 4.
Solution:
-
Assurez-vous que les valeurs des paramètres dans la commande envoyée par le côté robot se trouvent dans la plage valide.
1006
Mech-Vision: Données de pose invalides
Cause:
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Vision, la valeur du paramètre de pose du robot était invalide. Les scénarios possibles sont les suivants:
-
Les positions articulaires contenaient moins de 6 champs.
-
La pose de bride contenait moins de 6 champs.
-
La pose de bride était entièrement composée de 0.
-
| Par défaut, un robot à 6 axes est utilisé et donc la valeur du paramètre « pose du robot » occupe six champs. Si un robot à 4 ou 5 axes est utilisé, remplissez les champs vides avec 0. |
Solution:
-
Assurez-vous que le paramètre de pose du robot est correctement défini, c’est-à-dire assurez-vous que les positions articulaires ou la pose de bride sont correctement définies.
1007
Mech-Vision: Le projet est en cours d’exécution
Cause:
-
Pendant l’exécution du projet Mech-Vision, le côté robot a envoyé à nouveau la commande pour le démarrer.
| Mech-Vision permet l’exécution simultanée de plusieurs projets, mais un même projet Mech-Vision ne peut pas être relancé alors qu’il est déjà en cours d’exécution. |
Solution:
-
Assurez-vous que l’ID du projet Mech-Vision défini dans le programme du robot est correct.
-
Assurez-vous que le programme du robot ne contient pas de code qui déclenche le même projet Mech-Vision dans un court laps de temps. Lors de l’exécution du même projet, le client doit attendre la fin du projet avant de le relancer afin d’éviter cette erreur. Si le projet a fini de s’exécuter, un message indiquant que l’exécution du projet a été arrêtée s’affichera dans l’onglet Vision du panneau Log dans Mech-Vision.
1008
Mech-Vision: Liste des signaux de sortie numérique non fournie
Cause:
-
La liste des signaux DO pour la pince à vide obtenue de Mech-Vision était vide.
Solution:
-
Assurez-vous que le type d’outil dans l’outil de planification de trajectoire est une pince à vide de dépalettisation et que les signaux DO sont configurés correctement dans l’interface de configuration de la pince à vide.
1010
Mech-Vision: Le nombre de poses et le nombre d’étiquettes ne correspondent pas
Cause:
-
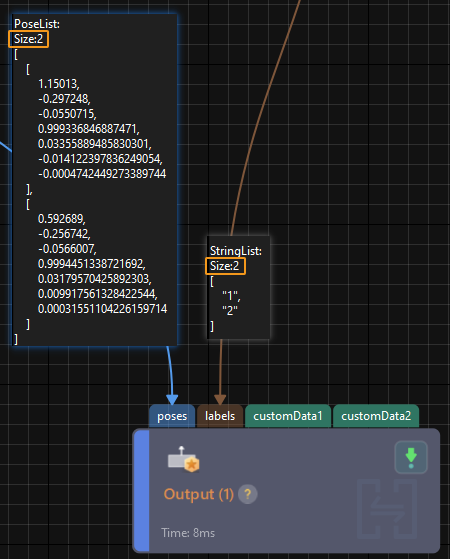
Dans l’Output Step du projet Mech-Vision, le nombre de poses émises par le port poses n’était pas égal au nombre d’étiquettes émises par le port labels.
Solution:
-
Vérifiez le flux de données du projet Mech-Vision pour vous assurer que le nombre de poses et le nombre d’étiquettes sont identiques. Par exemple, dans la figure suivante, le paramètre Size du port poses et celui du port labels sont tous deux définis sur 2, ce qui signifie que le nombre de poses et le nombre d’étiquettes sont identiques. Si le paramètre Size du port poses est défini sur 3 et celui du port labels sur 2, le nombre de poses et le nombre d’étiquettes ne sont pas identiques. Le problème ci-dessus se produira.
1011
Mech-Vision: ID de projet inexistant
Cause:
-
L’ID de projet spécifié dans la commande envoyée par le côté robot n’existait pas dans la liste de projets de Mech-Vision. Par exemple, lorsqu’il n’y a qu’un projet avec un ID de 1 dans la liste de projets, et que l’ID de projet spécifié dans la commande est 2, cette erreur apparaîtra.
Solution:
-
Assurez-vous que Chargement automatique du projet est sélectionné.
-
Assurez-vous que l’ID de projet spécifié dans la commande envoyée par le côté robot existe dans la liste de projets de Mech-Vision.
1012
Mech-Vision: ID de recette de paramètres inexistant
Cause:
-
L’ID de recette de paramètres spécifié dans la commande envoyée par le côté robot n’existait pas dans l’éditeur de recettes de paramètres. Par exemple, lorsqu’il n’y a qu’une recette de paramètres avec un ID de 1 dans l’éditeur et que l’ID de recette de paramètres spécifié dans la commande est 2, cette erreur se produira.
Solution:
-
Assurez-vous que l’ID de recette de paramètres spécifié dans la commande envoyée par le côté robot existe dans l’éditeur de recettes de paramètres.
1013
Mech-Vision: Recette de paramètres non configurée
Cause:
-
Le côté robot a envoyé la commande de basculer la recette de paramètres de Mech-Vision, mais le projet Mech-Vision n’avait aucune recette de paramètres.
Solution:
-
Vérifiez les paramètres de recette dans le projet Mech-Vision et assurez-vous que la recette et son ID sont corrects.
-
Le robot n’a pas nécessairement besoin d’envoyer la commande de changement de paramètres si Mech-Vision n’en a pas besoin.
1014
Mech-Vision: Échec du changement de recette de paramètres
Cause:
-
Le projet Mech-Vision est en cours d’exécution; modifier la recette de paramètres à ce moment entraînera cette erreur.
-
La communication entre Mech-Vision et le composant de communication est anormale.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
1015
Mech-Vision: Erreur d’exécution du projet
Cause:
-
Une erreur d’exécution s’est produite dans le projet Mech-Vision.
| Ce code d’état indique seulement qu’une erreur s’est produite lors du fonctionnement du projet Mech-Vision. Les raisons spécifiques de l’erreur ne sont pas fournies. |
Solution:
-
Vérifiez le message d’erreur dans le panneau de journal de Mech-Vision et modifiez le projet si nécessaire.
1016
Mech-Vision: Les données obtenues par la commande ne correspondent pas à la valeur Port Type de l’Output Step. Veuillez sélectionner une commande appropriée ou modifier la valeur Port Type
Cause:
-
Lorsque le client appelle la commande Get Vision Result, le paramètre Type de port de l’Output Step dans le projet Mech-Vision n’est pas défini sur Prédéfini (résultat de vision).
-
Lorsque le client appelle la commande Get Mech-Vision Custom Data, le paramètre Type de port de l’Output Step dans le projet Mech-Vision n’est pas défini sur Personnalisé.
-
Lorsque le client appelle la commande Get Mech-Vision Planned Path, le paramètre Type de port de l’Output Step dans le projet Mech-Vision n’est pas défini sur Prédéfini (trajectoire robot).
Solution:
-
Vérifiez la valeur du paramètre Type de port de l’Output Step dans le projet Mech-Vision.
-
Si le client appelle la commande Get Vision Result, le paramètre Type de port de l’Output Step dans le projet Mech-Vision doit être défini sur Prédéfini (résultat de vision).
-
Si le client appelle la commande Get Mech-Vision Custom Data, le paramètre Type de port de l’Output Step dans le projet Mech-Vision doit être défini sur Personnalisé.
-
Si le client appelle la commande Get Mech-Vision Planned Path, le paramètre Type de port de l’Output Step dans le projet Mech-Vision doit être défini sur Prédéfini (trajectoire robot).
-
1017
Mech-Vision: Échec du mappage de la chaîne d’étiquettes vers des nombres
Cause:
-
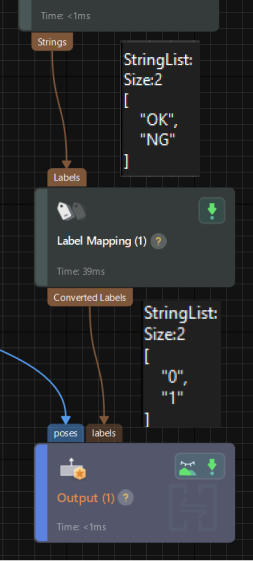
Les données émises par le port labels de l’Output Step dans Mech-Vision n’étaient pas une chaîne au format entier.
Solution:
-
Vérifiez les données émises par le port labels de l’Output Step. Si les données ne sont pas une chaîne au format entier, ajoutez une Label Mapping Step avant l’Output Step pour transformer la sortie du port labels en une chaîne au format entier. Par exemple, dans la figure ci-dessous, la Label Mapping Step mappe l’étiquette de chaîne OK à la chaîne au format entier 0 et l’étiquette de chaîne NG à la chaîne au format entier 1.
1018
Mech-Vision: Nombre de poses en entrée invalide
Cause:
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Vision, la valeur du paramètre du nombre attendu de points de vision ou de points de passage dépassait le nombre maximal de poses pouvant être envoyées à chaque fois.
| À partir de la barre d’outils de Mech-Vision, allez à . Modifiez la valeur de nombre maximal de poses à envoyer par envoi. La limite est de 30. |
Solution:
-
Assurez-vous que la valeur du paramètre du nombre attendu de points de vision ou de points de passage n’est pas supérieure au nombre maximal de poses pouvant être envoyées à chaque fois.
1019
Mech-Vision: Dépassement de délai d’exécution
Cause:
-
Depuis l’envoi par le côté robot de la commande d’obtention des résultats de vision, le projet Mech-Vision n’avait pas fini de s’exécuter dans la période de délai. La période de délai par défaut est de 10 s.
| À partir de la barre d’outils de Mech-Vision, allez à . Modifiez la valeur de Délai pour l’obtention des données Mech-Vision (s) pour changer le paramètre de délai. |
Solution:
-
Vous pouvez ajouter une commande de temporisation dans le programme du robot avant la commande qui obtient les résultats de vision.
-
Pour les projets Mech-Vision qui prennent un temps relativement long à s’exécuter, les utilisateurs peuvent modifier la période de délai selon leurs besoins.
1020
Mech-Vision: Projet non démarré
Cause:
-
Le côté robot a envoyé la commande d’obtention des résultats de vision avant d’envoyer la commande pour déclencher le projet Mech-Vision. Par exemple, il y a deux projets avec les IDs 1 et 2 dans la liste de projets de Mech-Vision. Si le côté robot déclenche le projet 1 mais demande d’obtenir les résultats de vision de l’objet 2, cette erreur se produira.
-
Le côté robot avait obtenu tous les résultats de vision mais envoyait encore la commande pour obtenir davantage de résultats de vision.
Solution:
-
Vérifiez le programme du robot et assurez-vous que l’ID du projet Mech-Vision dans la commande envoyée par le côté robot pour obtenir les résultats de vision est correct.
-
Lorsque le paramètre d’état de transmission des points de vision dans les données renvoyées est défini sur 1, cela indique que tous les points de vision ont été obtenus. Dans ce cas, le robot doit arrêter d’envoyer la commande qui obtient les résultats de vision.
1021
Mech-Vision: Échec de la définition des dimensions de l’objet
Cause:
-
Le projet Mech-Vision ne contenait pas de Read Object Dimensions Step.
Solution:
-
Assurez-vous qu’il y a une Read Object Dimensions Step dans le projet Mech-Vision.
1022
Mech-Vision: Paramètres de dimensions de l’objet invalides
Cause:
-
Les dimensions de l’objet envoyées au projet Mech-Vision étaient égales à 0 ou négatives.
Solution:
-
Assurez-vous que les dimensions de l’objet (longueur, largeur, hauteur) sont toutes des entiers positifs.
1023
Mech-Vision: Échec de la connexion à la caméra
Cause:
-
La Capture Images from Camera Step dans le projet Mech-Vision n’a pas réussi à se connecter à une caméra.
Solution:
-
Vérifiez l’alimentation de la caméra et les paramètres réseau pour vous assurer que l’alimentation de la caméra et le réseau sont correctement connectés.
-
Assurez-vous que l’adresse IP et le port définis dans la Capture Images from Camera Step sont corrects.
1024
Mech-Vision: Le nombre de poses et la taille de la liste des données du port personnalisé ne correspondent pas
Cause:
-
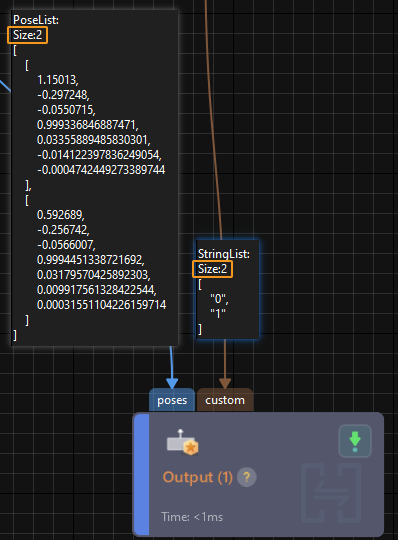
La longueur de la liste du port poses et la longueur de la liste du port personnalisé de l’Output Step du projet Mech-Vision ne correspondaient pas. Par exemple, considérez la liste de poses comme [[1,1,1,0,1,0,0]],[1,1,1,0,0,0,0]]. Si la liste de données émise par le port personnalisé est [[1,1]] ou [], les longueurs des deux listes ne sont pas égales; tandis que si la liste de données émise par le port personnalisé est [1,1], les longueurs des deux listes sont identiques.
Solution:
-
Vérifiez les poses et les données du port personnalisé dans le flux de données du projet Mech-Vision pour vous assurer que les longueurs des deux listes correspondent. Par exemple, dans la figure suivante, le paramètre Size du port poses et celui du port personnalisé sont tous deux définis sur 2, ce qui signifie que les longueurs des deux listes correspondent. Si le paramètre Size du port poses est défini sur 3 et celui du port personnalisé sur 2, les longueurs des deux listes ne correspondent pas. Le problème ci-dessus se produira.
1025
Mech-Vision: Données d’image visuelle en cours d’utilisation. L’exécution ne peut pas continuer
Cause:
-
L’image utilisée par la Capture Images from Camera Step dans le projet Mech-Vision est une image virtuelle provenant de votre ordinateur et non une image capturée par la caméra réelle.
Solution:
-
Dans la section Paramètres de la caméra de la Capture Images from Camera Step, vérifiez que le Mode virtuel est désactivé.
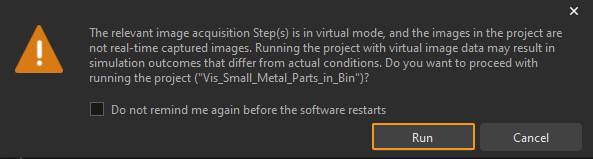
-
Si le mode virtuel est nécessaire, cliquez sur Exécuter dans la boîte de dialogue suivante. Ainsi, les données seront envoyées. De plus, nous vous recommandons de sélectionner Ne plus me le rappeler avant le redémarrage du logiciel.
1026
Mech-Vision: Type de pose invalide
Cause:
-
Dans la commande envoyée par le côté robot pour obtenir la trajectoire planifiée de Mech-Vision, la valeur du paramètre de type de pose de point de passage était invalide. La valeur du paramètre de type de pose de point de passage ne peut être que 1 ou 2.
Solution:
-
Assurez-vous que les valeurs des paramètres dans la commande envoyée par le côté robot se trouvent dans la plage valide.
1027
Mech-Vision: Erreur d’exécution à l’étape Path Planning
Cause:
-
Une erreur s’est produite lorsque le projet Mech-Vision exécutait la Path Planning Step.
| Ce code d’état indique seulement qu’une erreur s’est produite dans la Path Planning Step. Les raisons spécifiques de l’erreur ne sont pas encore fournies. |
Solution:
-
Ouvrez l’outil de planification de trajectoire et vérifiez le journal pour identifier la cause racine.
/* [id="interf-ec-1028"] */
/* === 1028 */
/* Mech-Vision:路径规划失败 */
/* 错误原因: */
/* * 如果项目中存在料筐,失败的原因可能是料筐内无视觉点。 / / * 如果项目为混码,失败的原因可能是路径规划工具未计算出工件将要放置的位置。 / / * 路径规划工具内部发生错误。 */
/* 排查思路: */
/* * 联系Mech-Mind技术支持获取帮助。 */
1030
Mech-Vision: Le robot ne peut pas atteindre le point de passage
L’étape Path Planning a signalé l’erreur. Les causes possibles sont les suivantes:
-
Le point de passage était hors de portée pour le robot.
-
Échec de la résolution de la cinématique inverse du robot.
Solution:
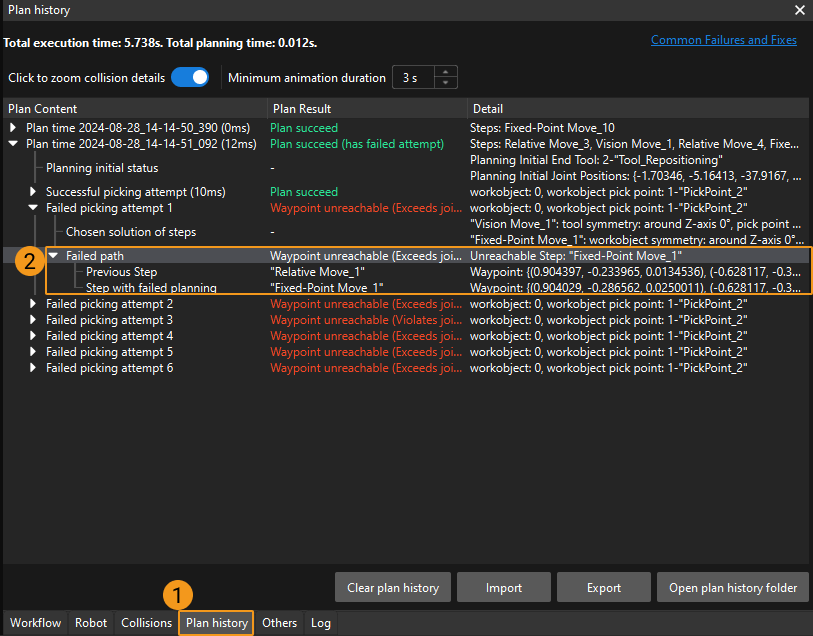
-
Ouvrez l’assistant de configuration de la Path Planning Step, consultez l’historique de planification pour localiser le contenu en rouge, puis localisez l’étape spécifique où le problème s’est produit.
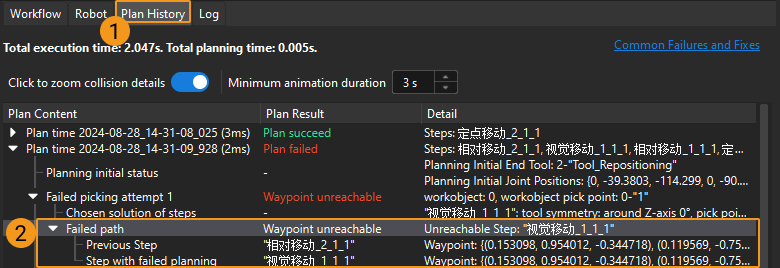
-
Pour résoudre l’erreur Waypoint unreachable, effectuez les opérations suivantes:
-
Vérifiez la pose du point de passage: assurez-vous que la pose est correctement orientée et atteignable. Notez la différence entre la pose de l’objet et le TCP.
-
Vérifiez le TCP: assurez-vous que le TCP dans la Path Planning Step est le même que le TCP réel du robot.
-
1033
Mech-Vision: Erreur de singularité de mouvement
L’étape Path Planning a signalé l’erreur. Les causes possibles sont les suivantes:
-
Le robot a détecté une erreur de singularité lors de la planification de trajectoire. La vitesse articulaire ou l’accélération articulaire du robot réel a dépassé les valeurs seuils de détection de singularité définies dans le logiciel.
-
Le robot ne pouvait pas atteindre le point en se déplaçant selon la ligne droite planifiée.
Solution:
-
Si le seuil de détection de singularité est trop strict, les utilisateurs peuvent envisager de réduire les valeurs de Max velocity ou de Reduction ratio. Pour modifier le seuil de détection de singularité, contactez l’assistance technique de Mech-Mind.
-
Si le robot ne peut pas atteindre le point en se déplaçant en ligne droite, les utilisateurs peuvent envisager de changer le type de mouvement en mouvement articulaire ou d’ajouter des points de passage intermédiaires.
1035
Mech-Vision: Point de prise invalide
Cause:
-
Aucun des points de prise n’est à l’intérieur du bac.
-
L’outil défini pour le point de prise dans la bibliothèque d’objets (workobject) ne correspond pas à l’outil sélectionné dans l’outil de planification de trajectoire.
Solution:
-
Pour la première cause:
-
Assurez-vous que les paramètres extrinsèques de la caméra sont correctement définis.
-
Dans l’Output Step du projet Mech-Vision, assurez-vous que la pose du point de prise de l’objet de travail est identique à la pose réelle de l’objet de travail.
-
Dans la Path Planning Step du projet Mech-Vision, cliquez sur Config Wizard pour accéder à l’outil de planification de trajectoire et assurez-vous que l’emplacement spécifié du bac est identique à l’emplacement réel du bac.
-
-
Pour la deuxième cause:
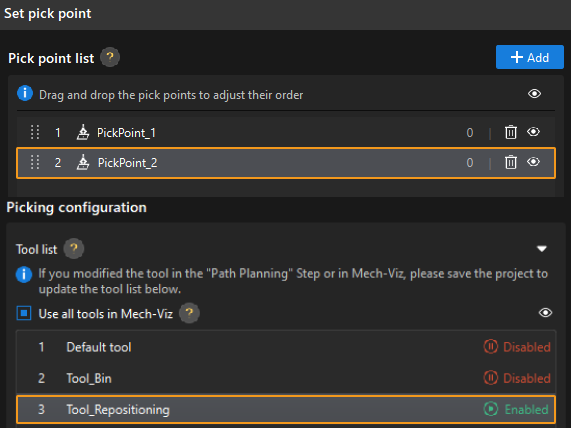
-
Dans la bibliothèque d’objets (workobject), vérifiez qu’un outil valide est configuré pour un point de prise. Par exemple, l’outil valide pour PickPoint_2 est Tool_Repositioning dans la figure ci-dessous.
-
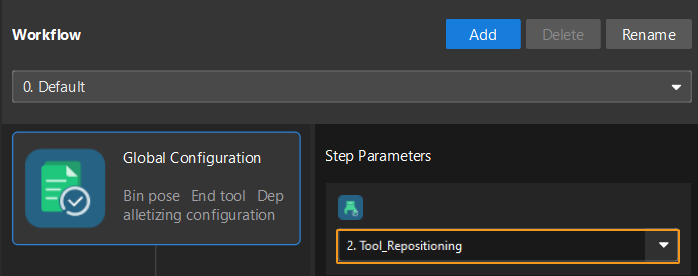
Dans Configuration globale de l’outil de planification de trajectoire, vérifiez que l’outil sélectionné est un outil valide de la liste d’outils pour le point de prise.
-
1036
Mech-Vision: Collision du robot détectée
L’étape Path Planning a signalé l’erreur. Les causes possibles sont les suivantes:
-
Le robot risquait d’entrer en collision avec des objets de la scène.
-
Le robot risquait d’entrer en collision avec le nuage de points de l’objet.
Solution:
-
Si le robot risque d’entrer en collision avec des objets de la scène, les utilisateurs peuvent envisager d’ajouter des points de passage intermédiaires pour que le robot évite ces objets.
-
Si le robot risque d’entrer en collision avec le nuage de points de l’objet, les utilisateurs peuvent envisager d’ajuster le seuil de détection de collision avec le nuage de points.
-
Si une erreur se produit à la position initiale (home) de la trajectoire planifiée, les utilisateurs peuvent envisager de définir la position HOME.
1037
Mech-Vision: Aucune position de dépose disponible pour la palettisation
Cause:
-
Le plateau est plein. Aucune position n’est disponible pour la palettisation.
Solution:
-
Ajoutez la logique de traitement appropriée au port de sortie d’échec de planification des étapes de type palettisation.
1044
Mech-Vision: Aucun point de vision pour l’étape Vision Move
L’étape Path Planning a signalé l’erreur. Les causes possibles sont les suivantes:
-
Le port d’entrée de la Path Planning Step n’a pas reçu de données de pose des points de vision.
Solution:
-
Vérifiez le port Vision Points de la Path Planning Step et assurez-vous que le port a reçu des poses.
1046
Mech-Vision: Outil invalide
L’étape Path Planning a signalé l’erreur. Les causes possibles sont les suivantes:
-
L’outil était invalide.
Solution:
-
Dans l’interface de l’outil de planification de trajectoire, vérifiez et assurez-vous que les paramètres d’outil et les paramètres de Configuration globale sont corrects.
1047
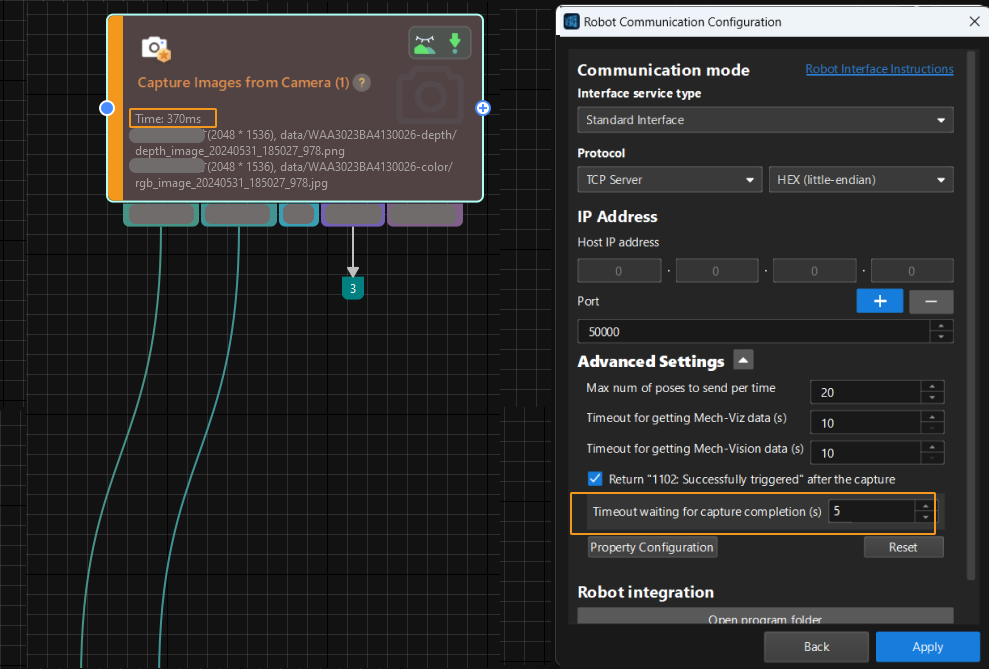
Mech-Vision: Dépassement de délai lors de l’attente de la fin de la capture
Cause:
-
La Capture Images from Camera Step n’a pas terminé son exécution dans la période de délai définie par Timeout waiting for capture completion(s).
Solution:
-
Sélectionnez Robot Communication Configuration dans la barre d’outils. Cliquez sur Suivant puis sur Paramètres avancés. Cochez Timeout waiting for capture completion(s) (disponible uniquement lorsque Return ‘1102: visible after the Successfully triggered est coché).
-
Comparez la valeur de “Timeout waiting for capture completion(s)” et le temps d’exécution de la “Capture Images from Camera” Step. Si la valeur de “Timeout waiting for capture completion(s)” est inférieure au temps d’exécution de la “Capture Images from Camera” Step, ajustez la valeur de “Timeout waiting for capture completion(s)” pour qu’elle soit supérieure au temps d’exécution de la “Capture Images from Camera” Step. Par exemple, dans la figure ci-dessous, la valeur de “Timeout waiting for capture completion(s)” est supérieure au temps d’exécution de la “Capture Images from Camera” Step, ce qui signifie que ce paramétrage est valide.
1048
Mech-Vision: Erreur de reconnaissance du masque de boîte
Cause:
-
Le projet Mech-Vision a validé les masques des objets de type boîte avec la Validate Box Object Masks Step. Cependant, la validation a échoué parce que les objets boîte ne satisfaisaient pas aux critères définis dans le panneau Step Parameters, notamment All Boxes Must Be Same Dimension, All Boxes Must Be Detected et Rectangularity Validation.
Solution:
-
Vérifiez la Validate Box Object Masks Step et assurez-vous que les données d’entrée et les valeurs des paramètres sont correctes.
1049
Mech-Vision: Erreur de vérification des dimensions de la boîte
Cause:
-
Le projet Mech-Vision a validé les masques des objets de type boîte avec la Validate Box Dimensions Step. Cependant, la validation a échoué parce que les dimensions calculées à partir des masques ne correspondaient pas aux données définies dans Box Dimension Information dans le panneau Step Parameters.
Solution:
-
Vérifiez la Validate Box Dimensions Step et assurez-vous que les données d’entrée et les valeurs des paramètres sont correctes.
1051
Mech-Vision: Échec de la définition de la pose
Cause:
-
Lorsque le client appelle la commande pour saisir des poses dans le projet Mech-Vision, le Step name n’est pas un nombre ou l’étape correspondant au Step name n’est pas Easy Create Poses.
Solution:
-
Vérifiez la Easy Create Poses Step dans le projet Mech-Vision pour vous assurer que le Nom de l’étape est un nombre.
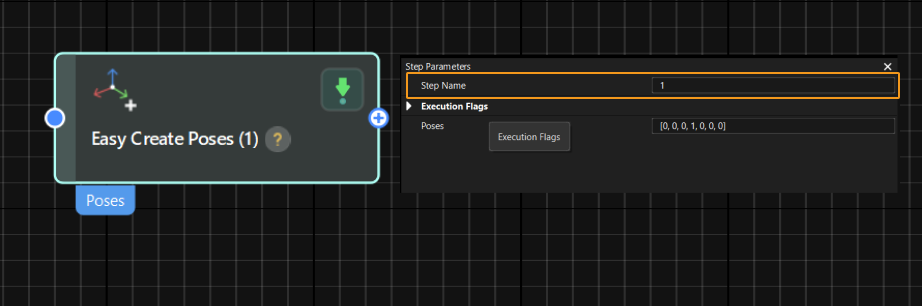
-
Vérifiez la commande pour saisir des poses dans le projet Mech-Vision afin de vous assurer que le Step name défini dans la commande correspond au Nom de l’étape dans la figure ci-dessus.
Dépannage de Mech-Viz
2001
Mech-Viz: Logiciel non enregistré
Cause:
-
Mech-Viz n’a pas été démarré.
-
Plusieurs fenêtres Mech-Viz ont été ouvertes en mode développeur.
Solution:
-
Assurez-vous que le logiciel Mech-Viz est démarré.
-
Quittez le mode développeur et redémarrez Mech-Viz.
2002
Mech-Viz: Le projet est en cours d’exécution
Cause:
-
Pendant l’exécution du projet Mech-Viz, le côté robot a envoyé à nouveau la commande pour le démarrer.
Solution:
-
Assurez-vous que le programme du robot ne contient pas de code qui déclenche le même projet Mech-Viz dans un court laps de temps.
2004
Mech-Viz: Le robot ne peut pas atteindre le point de passage
Cause:
-
Le point de passage était hors de portée pour le robot.
-
Si le projet Mech-Viz contient une Change Tool Step et que le TCP change avant et après le changement d’outil, le robot peut ne pas atteindre le point de passage.
Solution:
-
Ouvrez le logiciel Mech-Viz, consultez l’historique de planification pour localiser le contenu en rouge, puis localisez l’étape spécifique où le problème s’est produit.
-
Pour résoudre l’erreur Waypoint unreachable, effectuez les opérations suivantes:
-
Vérifiez la pose du point de passage: assurez-vous que la pose est correctement orientée et atteignable. Notez la différence entre la pose de l’objet et le TCP.
-
Vérifiez le TCP: assurez-vous que le TCP dans Mech-Viz est le même que le TCP réel du robot.
-
Vérifiez les limites logicielles: vérifiez si les limites logicielles sont correctement définies. Pour vérifier les limites logicielles, sélectionnez dans le coin inférieur droit de Mech-Viz.
-
2006
Mech-Viz: Paramètre de commande invalide pour démarrer Mech-Viz
Cause:
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Viz, la valeur du paramètre de type de pose du robot était invalide. La plage de valeurs du type de pose du robot est de 0 à 2.
Solution:
-
Assurez-vous que les valeurs des paramètres dans la commande envoyée par le côté robot se trouvent dans la plage valide.
2008
Mech-Viz: Erreur d’exécution
Cause:
-
Une erreur s’est produite lors de l’exécution du projet Mech-Viz.
Solution:
-
Ouvrez Mech-Viz et vérifiez le journal pour identifier la cause racine.
2011
Mech-Viz: Liste des signaux de sortie numérique non fournie
Cause:
-
La liste des signaux DO pour la pince à vide obtenue de Mech-Viz était vide.
Solution:
-
Assurez-vous qu’il y a une Set DO Step après la Vision Move Step, et que Receiver est défini sur Standard Interface dans le panneau de paramètres de l’étape Set DO.
-
Assurez-vous que le type d’outil est défini sur pince à vide de dépalettisation et que les signaux DO sont correctement configurés dans l’interface de configuration de la pince à vide.
2012
Mech-Viz: Type de pose invalide
Cause:
-
Dans la commande envoyée par le côté robot pour obtenir la trajectoire planifiée depuis Mech-Viz, la valeur du paramètre de type de pose de point de passage était invalide. La valeur du paramètre de type de pose de point de passage ne peut être que 1 ou 2.
-
Lorsque vous appelez la commande « exécuter le projet Mech-Viz et obtenir la trajectoire planifiée », la valeur du paramètre de type de pose de point de passage était invalide. La valeur du paramètre de type de pose de point de passage ne peut être que 1 ou 2.
Solution:
-
Assurez-vous que les valeurs des paramètres dans la commande envoyée par le côté robot se trouvent dans la plage valide.
2013
Mech-Viz: Données de pose invalides
Cause:
-
Dans la commande envoyée par le côté robot pour déclencher le projet Mech-Viz, la valeur du paramètre de pose du robot était invalide. Les scénarios possibles sont les suivants:
-
Les positions articulaires contenaient moins de 6 champs.
-
La pose de bride contenait moins de 6 champs.
-
La pose de bride était entièrement composée de 0.
-
| Par défaut, un robot à 6 axes est utilisé et donc la valeur du paramètre de pose du robot occupe six champs. Si un robot à 4 ou 5 axes est utilisé, remplissez les champs vides avec 0. |
Solution:
-
Assurez-vous que la valeur du paramètre de pose du robot est appropriée.
2014
Mech-Viz: Aucun projet défini pour le chargement automatique
Cause:
-
Le projet Mech-Viz n’était pas en cours d’exécution.
-
Le projet Mech-Viz n’était pas configuré pour le chargement automatique.
Solution:
-
Assurez-vous que le projet utilisé par le côté robot est ouvert dans Mech-Viz et que l’option Autoload Project est cochée.
2016
Mech-Viz: Échec de la définition de la valeur du paramètre de l’étape
Cause:
-
Une erreur s’est produite lorsque le côté robot a envoyé la commande pour définir la valeur du paramètre d’une étape Mech-Viz.
Solution:
-
Assurez-vous que l’ID d’étape et le nom de clé de paramètre dans le fichier property_config sont corrects.
| À partir de la barre d’outils de Mech-Vision, allez à . Cliquez sur Property Configuration pour ouvrir le fichier property_config. |
2017
Mech-Viz: Échec de l’arrêt de l’exécution
Cause:
-
Depuis l’envoi par le côté robot de la commande d’arrêt du projet Mech-Viz, le projet ne s’est pas arrêté dans les 5 s.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
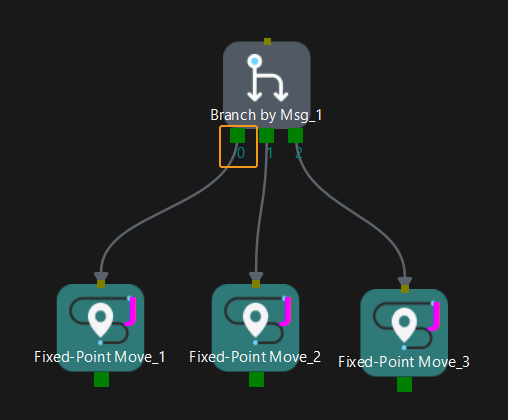
2018
Mech-Viz: Numéro de port de sortie de branche invalide
Cause:
-
Dans la commande envoyée par le côté robot pour définir le port de sortie pour la Branch by Msg Step dans Mech-Viz, la valeur du paramètre de port de sortie était inférieure ou égale à 0, ou la valeur était supérieure au nombre de ports de la Branch by Msg Step.
Solution:
-
Ouvrez le projet Mech-Viz, trouvez la Branch by Msg Step dans l’onglet Workflow, puis assurez-vous que le numéro de port de sortie défini dans la commande correspond au port de sortie de la Branch by Msg Step. Par exemple, si le numéro du port de sortie est défini sur 1 dans la commande, le projet Mech-Viz emprunte le port de sortie 0 de la Branch by Msg Step.
2019
Mech-Viz: Échec de la définition de la branche
Cause:
-
Le paramètre Step ID dans la commande envoyée par le côté robot pour définir le port de sortie de la Branch by Msg Step dans Mech-Viz ne correspondait à aucune Branch by Msg Step dans le projet Mech-Viz.
Solution:
-
Assurez-vous que le Step ID dans la commande envoyée par le côté robot correspond à une étape dans le projet Mech-Viz.
2020
Mech-Viz: Erreur de singularité de mouvement
Cause:
-
Le robot a détecté une erreur de singularité lors de la planification de trajectoire. La vitesse articulaire ou l’accélération articulaire du robot réel a dépassé les valeurs seuils de détection de singularité définies dans Mech-Viz.
-
Le robot ne pouvait pas atteindre le point en se déplaçant selon la ligne droite planifiée.
Solution:
-
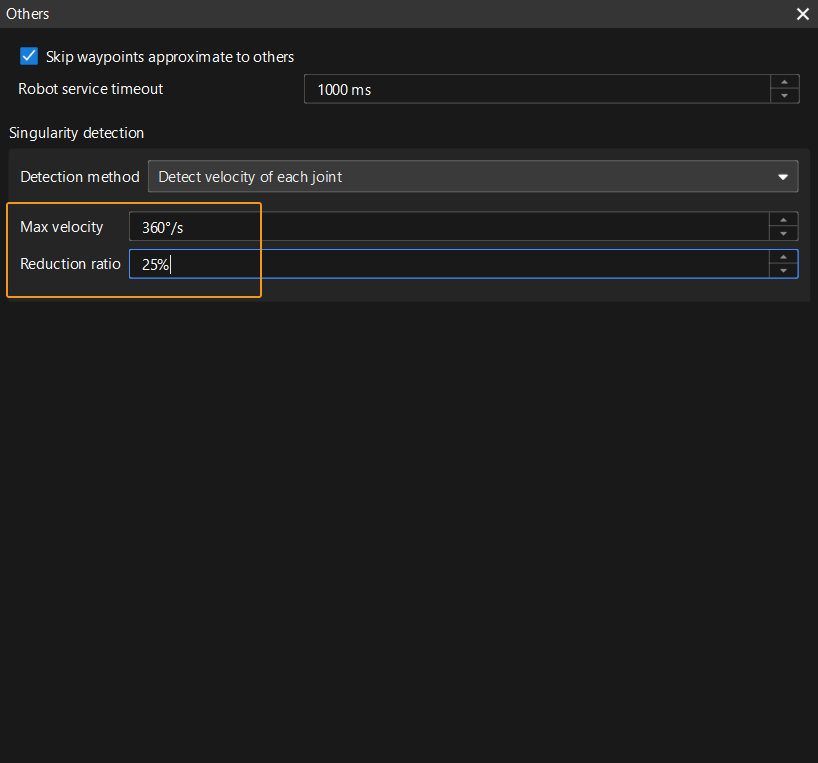
Si le seuil de détection de singularité dans Mech-Viz est trop strict, modifiez la valeur de Max velocity ou Reduction ratio dans l’onglet Others de Mech-Viz.
-
Max velocity: La vitesse angulaire maximale autorisée pour chaque articulation du robot.
-
Reduction ratio: Lorsque la vitesse détectée de n’importe quelle articulation dépasse la valeur Max velocity spécifiée, la vitesse définie dans l’étape de type mouvement dans Mech-Viz sera réduite selon la valeur de Reduction ratio (nouvelle vitesse = vitesse d’origine × taux de réduction), et la détection de singularité sera effectuée à nouveau. Si la vitesse réduite est inférieure à la Max velocity définie, le robot se déplacera à la vitesse réduite dans l’étape correspondante. Si la vitesse réduite dépasse toujours la Max velocity définie, le logiciel Mech-Viz déterminera qu’une singularité se produira en raison de la trajectoire planifiée. Cela signifie que la trajectoire planifiée ne peut pas passer la détection de singularité.
-
-
Si le robot ne peut pas se déplacer linéairement, essayez d’abord la Méthode 1. Si le problème persiste, essayez l’une des méthodes restantes.
-
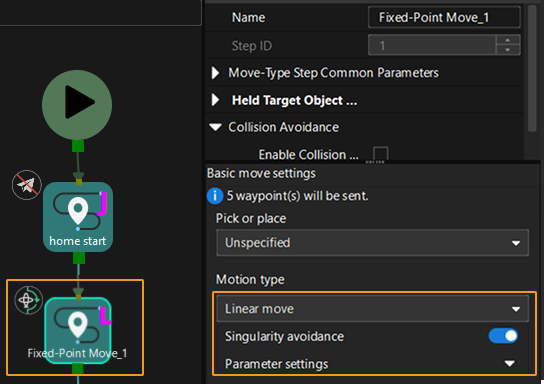
Méthode 1: Dans Mech-Viz, sélectionnez l’étape de type mouvement qui provoque l’erreur, définissez Motion type sur Linear move, activez Singularity avoidance, puis définissez les paramètres selon les conditions réelles.
-
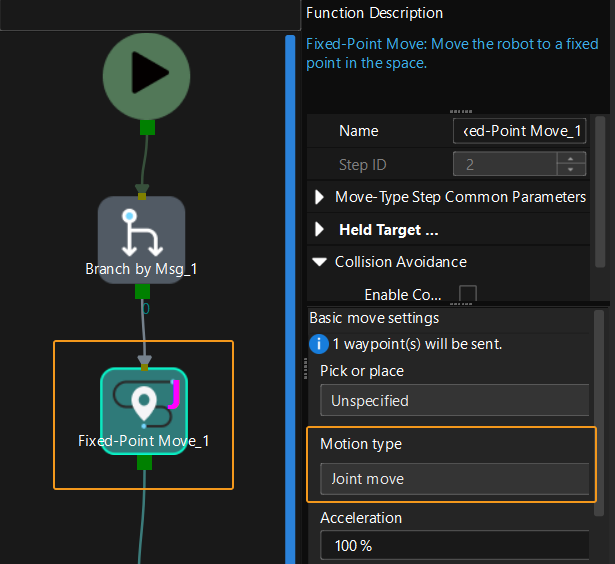
Méthode 2: Dans Mech-Viz, sélectionnez l’étape de type mouvement qui provoque l’erreur et définissez Motion type sur Joint move.
-
Méthode 3: Dans Mech-Viz, ajoutez une ou plusieurs étapes de type mouvement avant l’étape qui provoque l’erreur. Cela revient à ajouter des points de passage intermédiaires. Par exemple, dans la figure ci-dessous, Fixed-Point Move_3 est ajouté entre Fixed-Point Move_1 et home. Cela signifie qu’un point de passage intermédiaire est ajouté.

-
2022
Mech-Viz: Le projet n’a pas été exécuté ou n’a aucun résultat après exécution
Cause:
-
Lorsque le côté robot a envoyé la commande pour définir le port de sortie de la Branch by Msg Step dans Mech-Viz, le projet Mech-Viz n’était pas en cours d’exécution.
-
Avant d’envoyer la commande pour obtenir la trajectoire planifiée, le côté robot n’a pas envoyé la commande pour déclencher le projet Mech-Viz.
-
Lorsque le côté robot a envoyé la commande pour obtenir la trajectoire planifiée de Mech-Viz, Mech-Viz n’avait pas encore émis le résultat de planification.
-
Le côté robot avait obtenu tous les points de passage mais envoyait encore la commande pour obtenir la trajectoire planifiée de Mech-Viz.
Solution:
-
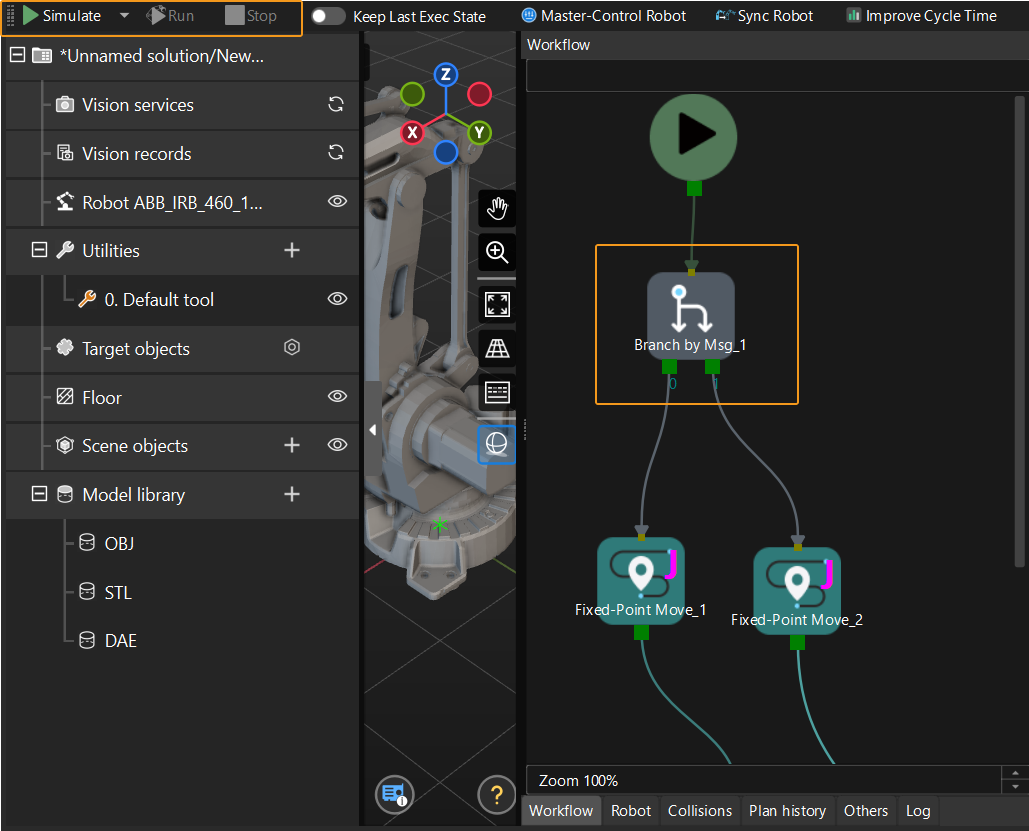
Assurez-vous que le projet Mech-Viz est en cours d’exécution lorsque le côté robot envoie la commande pour définir le port de sortie de la Branch by Msg Step. Après avoir appelé la commande pour exécuter le projet Mech-Viz, assurez-vous que le projet Mech-Viz est en cours d’exécution, comme illustré dans la figure ci-dessous, puis appelez la commande pour définir le port de sortie de la Branch by Msg Step dans Mech-Viz.
-
Assurez-vous que le côté robot envoie la commande pour déclencher le projet Mech-Viz AVANT d’envoyer la commande pour obtenir la trajectoire planifiée.
-
Lorsque le paramètre d’état de transmission des points de passage dans les données renvoyées est défini sur 1, cela indique que tous les points de passage ont été obtenus. Dans ce cas, le côté robot doit arrêter d’envoyer la commande pour obtenir la trajectoire planifiée de Mech-Viz.
2024
Mech-Viz: ID d’étape de branche invalide
Cause:
-
Dans la commande envoyée par le côté robot pour définir le port de sortie de la Branch by Msg Step dans Mech-Viz, la valeur du paramètre Step ID n’était pas un entier positif.
Solution:
-
Assurez-vous que le Step ID dans la commande envoyée par le côté robot est un entier positif.
2025
Mech-Viz: Dépassement de délai d’exécution
Cause:
-
Depuis l’envoi par le côté robot de la commande pour obtenir la trajectoire planifiée, le projet Mech-Viz n’avait pas fini de s’exécuter dans la période de délai. La période de délai par défaut est de 10 s.
| À partir de la barre d’outils de Mech-Vision, allez à . Modifiez la valeur de Délai pour l’obtention des données Mech-Viz (s) pour changer le paramètre de délai. |
Solution:
-
Vous pouvez ajouter une commande de temporisation dans le programme du robot avant la commande qui obtient la trajectoire planifiée depuis Mech-Viz.
-
Pour les projets Mech-Viz qui prennent un temps relativement long à s’exécuter, les utilisateurs peuvent modifier la période de délai selon leurs besoins.
2026
Mech-Viz: ID d’étape invalide pour les étapes de type index
Cause:
-
Dans la commande envoyée par le côté robot pour définir le Current Index pour Mech-Viz, la valeur du paramètre Step ID n’était pas un entier positif.
Solution:
-
Assurez-vous que le Step ID dans la commande envoyée par le côté robot est un entier positif.
2027
Mech-Viz: Valeur de Current Index invalide
Cause:
-
Dans la commande envoyée par le côté robot pour définir le Current Index pour Mech-Viz, la valeur du paramètre Current Index n’était pas un entier positif.
Solution:
-
Assurez-vous que la valeur du paramètre Current Index dans la commande envoyée par le robot est un entier positif.
2028
Mech-Viz: Échec de la définition de l’index
Cause:
-
Le paramètre Step ID dans la commande envoyée par le côté robot pour définir le Current Index pour Mech-Viz ne correspondait à aucune étape de type index dans le projet Mech-Viz.
Solution:
-
Assurez-vous que le Step ID dans la commande envoyée par le côté robot correspond à une étape dans le projet Mech-Viz.
2030
Mech-Viz: Point de prise invalide
Cause:
-
Aucun des points de prise n’est dans le bac spécifié.
-
L’outil valide défini pour le point de prise dans la bibliothèque d’objets (workobject) ne correspond pas à l’outil sélectionné dans la Change Tool Step du projet Mech-Viz.
-
Après utilisation de la fonction Filter Vision Result de la Vision Move Step, Mech-Viz considérera les résultats de vision qui tombent en dehors de la plage spécifiée comme des points de prise invalides.
Solution:
-
Pour la première cause:
-
Assurez-vous que les paramètres extrinsèques de la caméra sont correctement définis.
-
Dans l’Output Step du projet Mech-Vision, assurez-vous que la pose du point de prise de l’objet de travail est identique à la pose réelle de l’objet de travail.
-
Dans la Vision Move Step du projet Mech-Viz, vérifiez .
-
Si Update Bin with Vision n’est pas sélectionné, assurez-vous que l’emplacement du bac spécifié dans le projet Mech-Viz est identique à l’emplacement réel du bac.
-
Si Update Bin with Vision est sélectionné, assurez-vous que l’emplacement du bac reconnu dans le projet Mech-Vision est identique à l’emplacement réel du bac.
-
-
-
Pour la deuxième cause:
-
Dans la bibliothèque d’objets (workobject), vérifiez qu’un outil valide est configuré pour un point de prise. Par exemple, l’outil valide pour PickPoint_2 est Tool_Repositioning dans la figure ci-dessous.
-
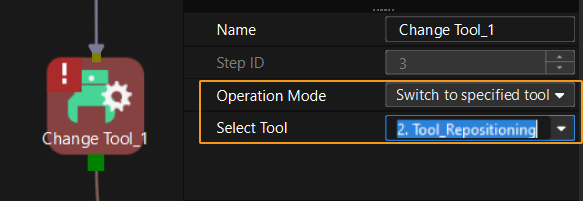
Vérifiez les paramètres en fonction du mode de fonctionnement sélectionné pour la Change Tool Step dans le projet Mech-Viz.
-
Si le paramètre Mode de fonctionnement de la Change Tool Step est défini sur Basculer vers l’outil spécifié, assurez-vous que le paramètre Select Tool est défini sur un outil valide dans la liste des outils pour le point de prise.
-
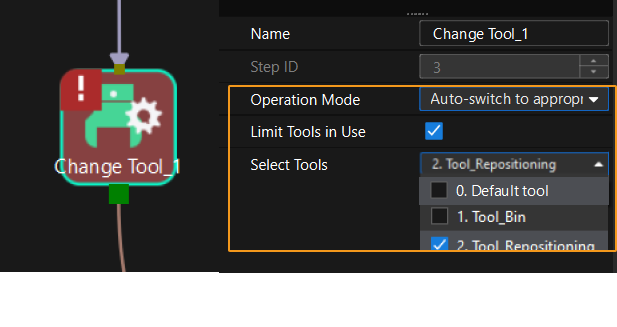
Dans le projet Mech-Viz, si le paramètre Mode de fonctionnement de la Change Tool Step est défini sur Basculement automatique vers l’outil approprié et que Limiter les outils utilisés est sélectionné, assurez-vous que le paramètre Select Tools est défini sur des outils valides dans la liste des outils pour le point de prise.
-
-
-
Pour la troisième cause:
-
Modifiez le projet Mech-Vision pour vous assurer que le résultat de vision répond aux exigences.
-
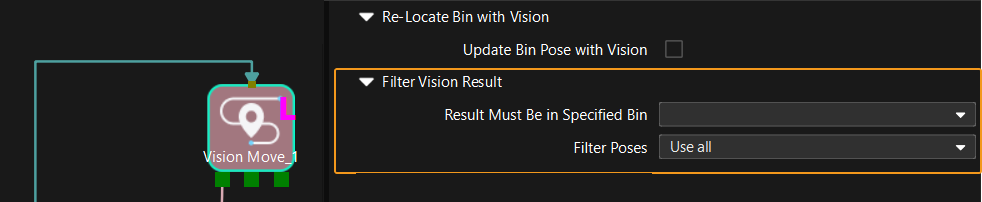
Dans la Vision Move Step, allez à et réinitialisez les deux paramètres sous Filter Vision Result pour vous assurer que les points de prise répondent aux exigences.
-
2031
Mech-Viz: Collision du robot détectée
Pour les causes d’erreur et les méthodes de dépannage, voir cette description.
2032
Mech-Viz: Aucune position de dépose disponible pour la palettisation
Cause:
-
Le plateau est plein. Aucune position n’est disponible pour la palettisation.
Solution:
-
Ajoutez la logique de traitement appropriée au port de sortie d’échec de planification des étapes de type palettisation.
2036
Mech-Viz: Étape de reconnaissance visuelle non appelée
Cause:
-
Le service de vision défini pour la Vision Move Step via le paramètre Vision Service Name n’a pas été appelé avec succès. D’autre part, le projet Mech-Viz était censé sortir par le port « Not called » de la Check Vision Result Step, mais ce port n’était connecté à aucune étape. Le projet Mech-Viz s’est donc arrêté.
Solution:
-
Vérifiez le workflow du projet Mech-Viz et assurez-vous que la Vision Move Step avant la Check Vision Result Step est appelée avec succès.
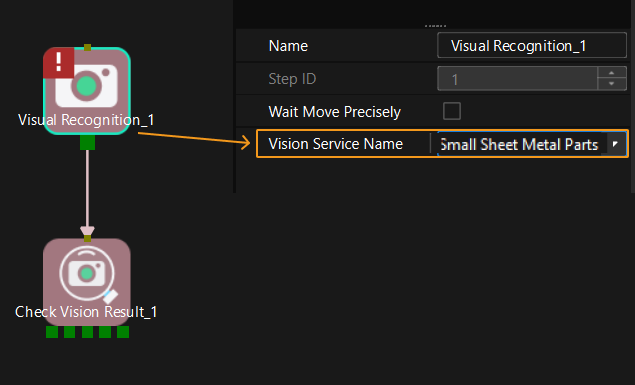
Vision Service indique le nom du projet Mech-Vision qui correspond au projet Mech-Viz. Vous pouvez trouver le nom du projet dans la liste de projets de Mech-Vision, comme illustré dans la figure suivante. 
2037
Mech-Viz: Aucun résultat de vision reçu du service de vision
Cause:
-
Le service de vision défini pour la Vision Move Step via le paramètre Vision Service Name n’a émis aucun résultat de vision. D’autre part, le projet Mech-Viz était censé sortir par le port No result de la Check Vision Result Step, mais ce port n’était connecté à aucune étape. Le projet Mech-Viz s’est donc arrêté.
Solution:
-
Lorsque le projet Mech-Viz est en cours d’exécution, dans le panneau Log de Mech-Vision, assurez-vous que l’Output Step contient des données, comme illustré dans la figure ci-dessous. Si l’étape ne contient pas de données, voir 1002 pour vérifier l’ensemble du flux de données.
-
Dans le projet Mech-Viz, assurez-vous que le port de sortie no result de la Check Vision Result Step est connecté à une étape suivante, telle que la Notify Step.
2038
Mech-Viz: Aucun nuage de points dans la ROI
Cause:
-
Le service de vision défini pour la Vision Move Step via le paramètre Vision Service Name n’a émis aucun résultat de vision. D’autre part, le projet Mech-Viz était censé sortir par le port No CloudInRoi de la Check Vision Result Step, mais ce port n’était connecté à aucune étape. Le projet Mech-Viz s’est donc arrêté.
Solution:
-
Reportez-vous à 1003 pour le dépannage.
2039
Mech-Viz: Aucun point de vision pour l’étape Vision Move Step
Cause:
-
Les causes possibles concernant la Vision Move Step sont les suivantes:
-
Le service de vision n’a pas fourni de résultats de vision.
-
Toutes les poses des résultats de vision ont été utilisées dans la planification de trajectoire.
-
Solution:
-
Reportez-vous à 1002 pour le dépannage.
-
Vérifiez si la Check Vision Result Step est utilisée correctement dans le projet Mech-Viz.
2041
Mech-Viz: Échec de l’obtention du paramètre de l’étape
Cause:
-
Une erreur s’est produite lorsque le côté robot a envoyé la commande pour lire la valeur du paramètre de l’étape Mech-Viz.
Solution:
-
Assurez-vous que l’ID d’étape et le nom de clé de paramètre dans le fichier property_config sont corrects.
| À partir de la barre d’outils de Mech-Vision, allez à . Cliquez sur Property Configuration pour ouvrir le fichier property_config. |
2042
Mech-Viz: Échec de l’obtention du résultat de planification dans Vision Move
Cause:
-
Une erreur s’est produite lorsque le côté robot a envoyé la commande pour obtenir les données Vision Move ou les données de sortie personnalisées depuis Mech-Viz.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
2043
Mech-Viz: Échec de l’obtention des données personnalisées
Cause:
-
Une erreur s’est produite lorsque le côté robot a envoyé la commande pour obtenir les données Vision Move ou les données de sortie personnalisées depuis Mech-Viz.
Solution:
-
Reportez-vous à 1024 pour le dépannage.
2044
Mech-Viz: Service de vision non enregistré
Cause:
-
Les utilisateurs n’ont pas défini une valeur appropriée pour le paramètre Vision Service Name de la Visual Recognition Step dans le projet Mech-Viz.
Solution:
-
Assurez-vous que le service de vision défini pour la Visual Recognition Step est correct.
2045
Mech-Viz: Outil invalide
Cause:
-
La Check Tool Step ou la Change Tool Step n’a pas trouvé l’outil à vérifier ou à changer.
Solution:
-
Assurez-vous que le paramètre Tool défini pour la Check Tool Step ou la Change Tool Step est valide.
2047
Mech-Viz: Erreur de vérification des dimensions de la boîte
-
Le projet Mech-Vision a validé les masques des objets de type boîte avec la Validate Box Dimensions Step. Cependant, la validation a échoué parce que les dimensions calculées à partir des masques ne correspondaient pas aux données définies dans Box Dimension Information dans le panneau Step Parameters.
Solution:
-
Vérifiez la Validate Box Dimensions Step et assurez-vous que les données d’entrée et les valeurs des paramètres sont correctes.
Dépannage du composant de communication
3001
Composant de communication: Commande invalide
Cause:
-
Le système de vision ne prend pas en charge la commande envoyée par le côté robot.
Solution:
-
Vérifiez le protocole dans la boîte de dialogue Robot Communication Configuration pour vous assurer que le format est correct. Vérifiez également le protocole dans le programme client pour vous assurer qu’il correspond au format défini dans la boîte de dialogue.
-
Vérifiez le programme du robot pour vous assurer que les commandes envoyées sont correctes.
3002
Composant de communication: Longueur de données ou format invalide pour le paramètre de commande
Cause:
-
Dans la commande envoyée par le côté robot, la longueur des données était anormale. Par exemple, la pose du robot occupait moins de 6 champs.
-
Dans la commande envoyée par le côté robot, le format des données était anormal. Par exemple, la virgule chinoise était utilisée comme délimiteur.
Solution:
-
Vérifiez le programme du robot pour vous assurer que les commandes envoyées sont correctes.
3005
Composant de communication: Mech-Vision a dépassé le délai
Cause:
-
Le système de vision a dépassé le délai lors de l’appel du service gRPC.
Solution:
-
Essayez de redémarrer Mech-Vision.
3006
Composant de communication: Erreur inconnue
Cause:
-
Une erreur inconnue s’est produite dans le système de vision.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
3007
Composant de communication: Dépassement de délai du signal d’accusé de réception des données
Lorsque le protocole de communication est PROFINET ou Ethernet/IP, l’erreur peut apparaître dans les scénarios suivants:
-
Avant que le système de vision n’envoie de nouvelles données de pose au côté robot, le côté robot n’a pas réinitialisé la valeur du signal Data_Acknowledge à 0 dans la période de délai (la valeur est de 10 s par défaut).
-
Après que le système de vision a envoyé de nouvelles données de pose au côté robot, le côté robot n’a pas réinitialisé la valeur du signal Data_Acknowledge à 1 dans la période de délai (la valeur est de 10 s par défaut).
Solution:
-
Vérifiez le programme du robot et assurez-vous que la valeur du signal Data_Acknowledge est définie sur 0 avant que le côté robot n’envoie la commande pour obtenir les résultats de vision ou obtenir la trajectoire planifiée de Mech-Viz.
-
Vérifiez le programme du robot et assurez-vous que le signal Data_Acknowledge est défini sur 1 immédiatement après que le programme lit les données de pose envoyées par le système de vision.
3008
Composant de communication: L’ID de configuration n’existe pas
Cause:
-
Dans le fichier property_config, le Config ID ou le nom de clé de paramètre, utilisé dans la commande envoyée par le côté robot pour lire ou définir la valeur d’un paramètre d’étape Mech-Viz, était erroné.
| À partir de la barre d’outils de Mech-Vision, allez à . Cliquez sur Property Configuration pour ouvrir le fichier property_config. |
Solution:
-
Assurez-vous que le Config ID et le nom de clé de paramètre dans le fichier property_config sont corrects.
Dépannage d’étalonnage
7001
Étalonnage: Erreur de paramètre
Cause:
-
Une erreur s’est produite dans les données de pose du robot dans la commande envoyée par le côté robot au système de vision pendant l’étalonnage. Les scénarios possibles sont les suivants:
-
Les positions articulaires contenaient moins de 6 champs.
-
La pose de bride contenait moins de 6 champs.
-
La pose de bride était entièrement composée de 0.
-
| Par défaut, un robot à 6 axes est utilisé et donc la valeur du paramètre de pose du robot occupe six champs. Si un robot à 4 ou 5 axes est utilisé, remplissez les champs vides avec 0. |
Solution:
-
Assurez-vous que les données de pose du robot envoyées par le côté robot sont correctes.
7002
Étalonnage: Aucune pose de bride d’étalonnage fournie par Mech-Vision
Cause:
-
Pendant l’étalonnage, Mech-Vision n’a pas envoyé la pose de bride du prochain point d’étalonnage au robot.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
7003
Étalonnage: Positions articulaires d’étalonnage non fournies par Mech-Vision
Cause:
-
Pendant l’étalonnage, Mech-Vision n’a pas envoyé les positions articulaires du prochain point d’étalonnage au robot.
Solution:
-
Contactez l’assistance technique de Mech-Mind.
7004
Étalonnage: Le robot n’a pas pu atteindre le point d’étalonnage
Cause:
-
Pendant l’étalonnage, le robot n’a pas pu atteindre le point d’étalonnage précédent. Par conséquent, la valeur du paramètre de code d’état dans la commande d’étalonnage envoyée par le côté robot au système de vision était 2. Et le système de vision n’a renvoyé aucune donnée au côté robot.
Solution:
-
Contactez l’assistance technique de Mech-Mind.