Elite Étalonnage automatique
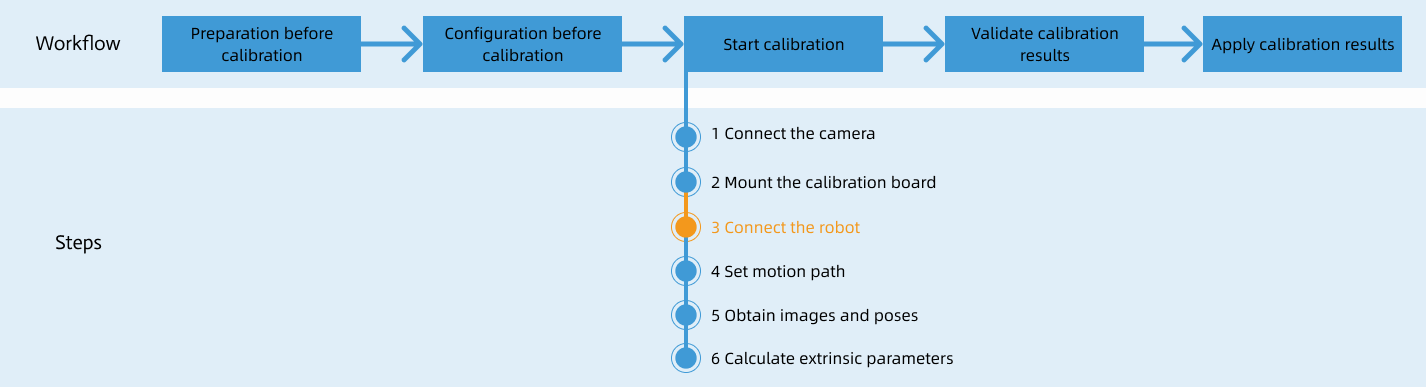
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
|
Avant de continuer, assurez-vous que :
|
1. Ouvrir les variables nécessaires
Le point central de l’outil (TCP) du point d’étalonnage est stocké dans la variable V099, et les positions articulaires correspondantes sont stockées dans P099. Ouvrez les variables V099 et P099 selon les étapes ci-dessous avant l’étalonnage.
-
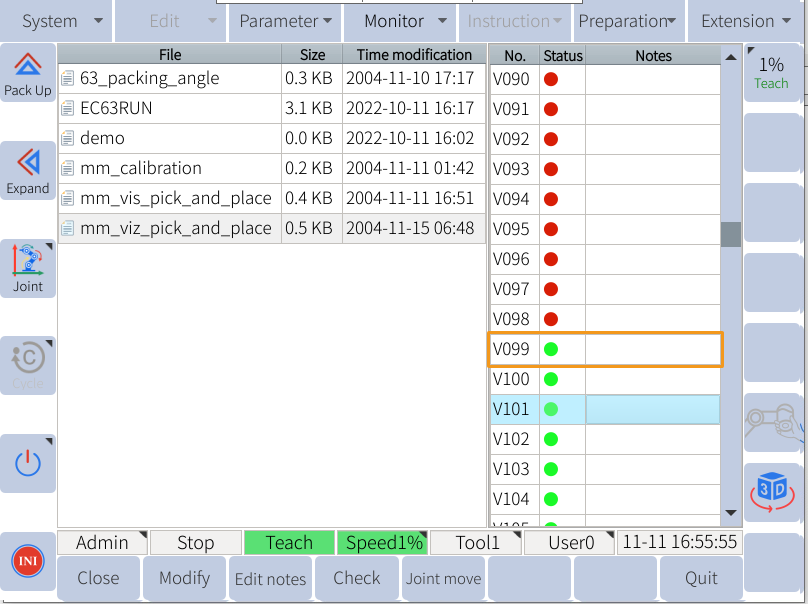
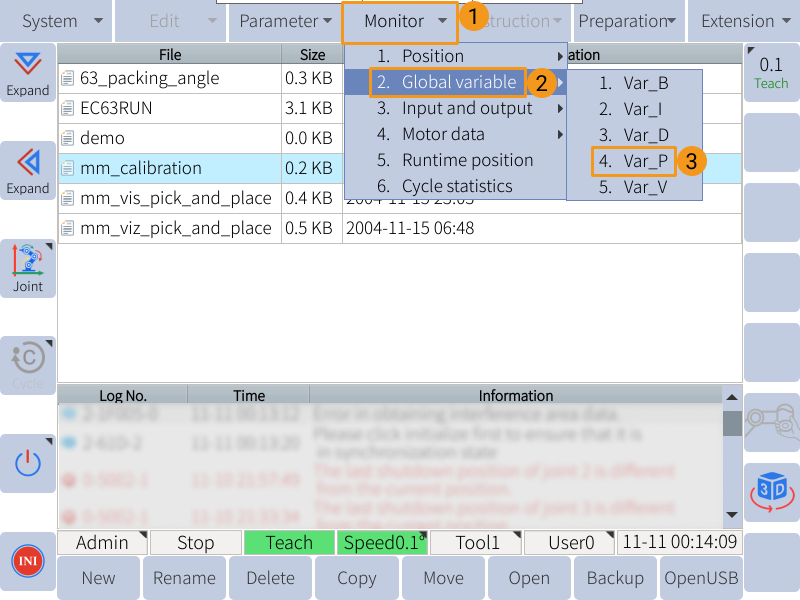
Sur le boîtier d’apprentissage, appuyez sur pour vérifier si la variable V099 est ouverte. Si le point dans la colonne Statut est rouge, la variable n’est pas ouverte.
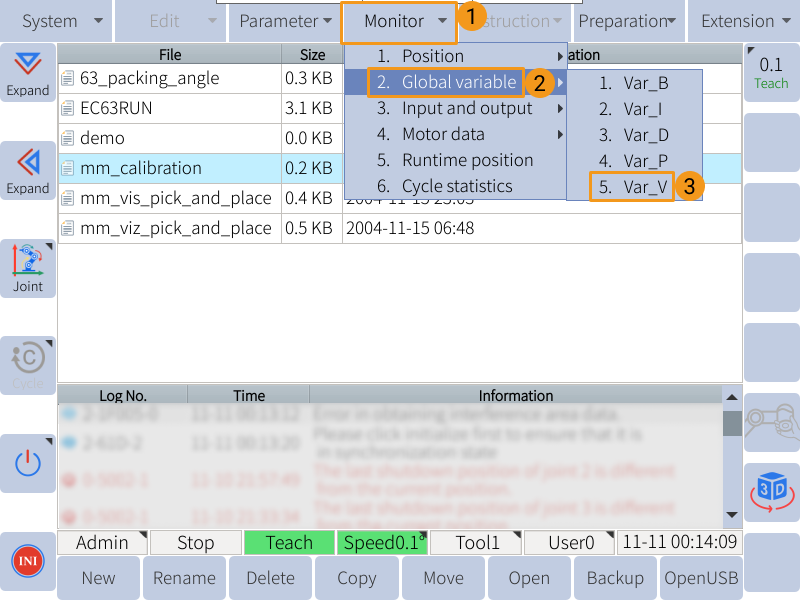
Sélectionnez une variable fermée, et appuyez sur Ouvrir en bas à gauche pour l’ouvrir.
-
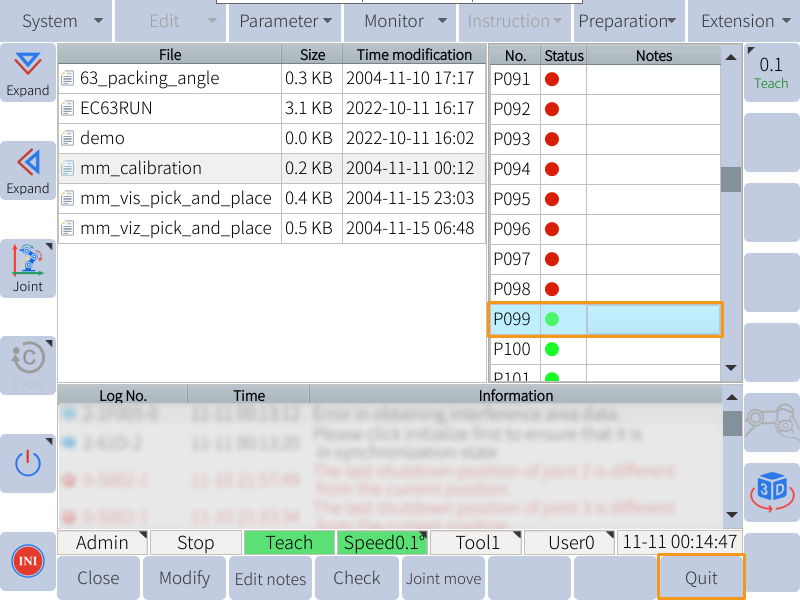
De même, appuyez sur et ouvrez la variable P099. Appuyez sur Quitter pour revenir à la page d’accueil.
2. Définir le point de départ de l’étalonnage
-
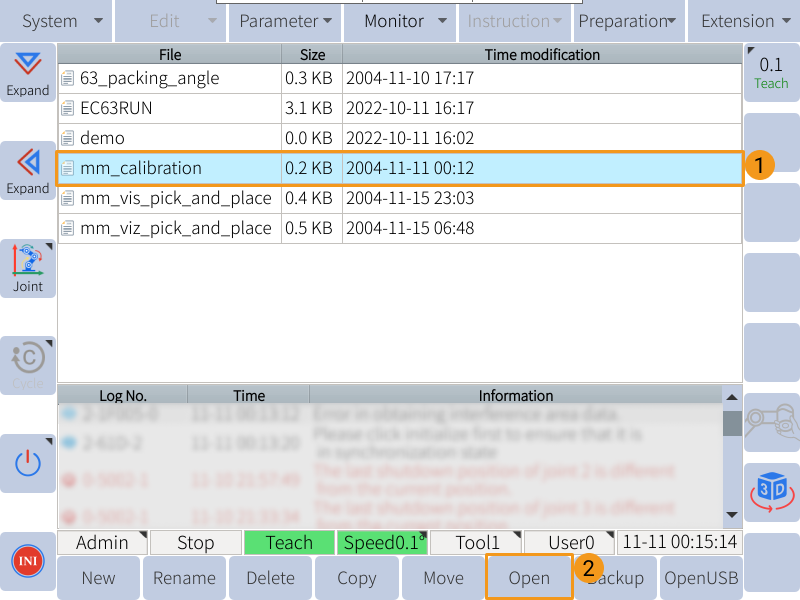
Sur la page d’accueil, sélectionnez le programme mm_calibration, et appuyez sur Ouvrir.
-
Déplacez manuellement le robot vers le point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
Sur le boîtier d’apprentissage, appuyez sur , et sélectionnez la variable pour enregistrer le point de départ de l’étalonnage (P004 est utilisé dans la figure suivante).
-
Si la variable est fermée, appuyez sur Ouvrir pour enregistrer le point de départ de l’étalonnage.
-
Si la variable est ouverte, appuyez d’abord sur Fermer puis sur Ouvrir pour enregistrer le point de départ de l’étalonnage.
-
-
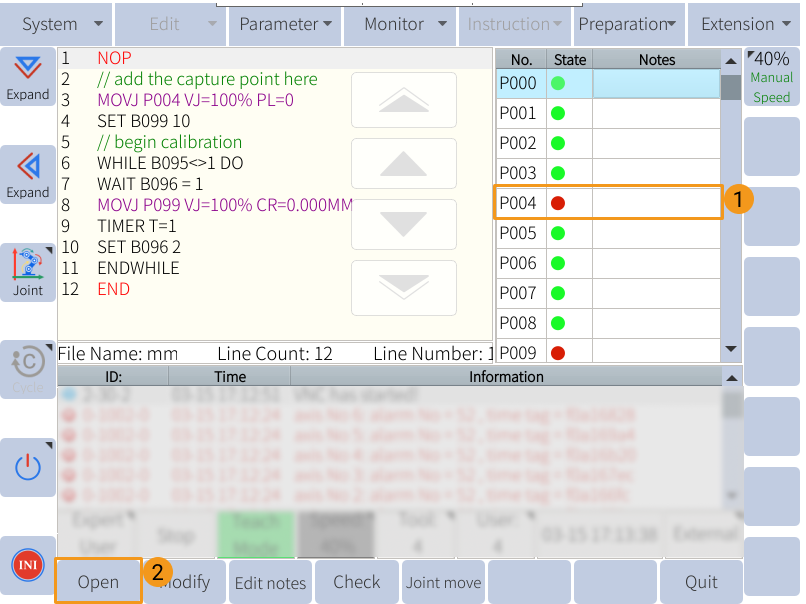
Sélectionnez la deuxième ligne dans le programme mm_calibration, et appuyez sur .
-
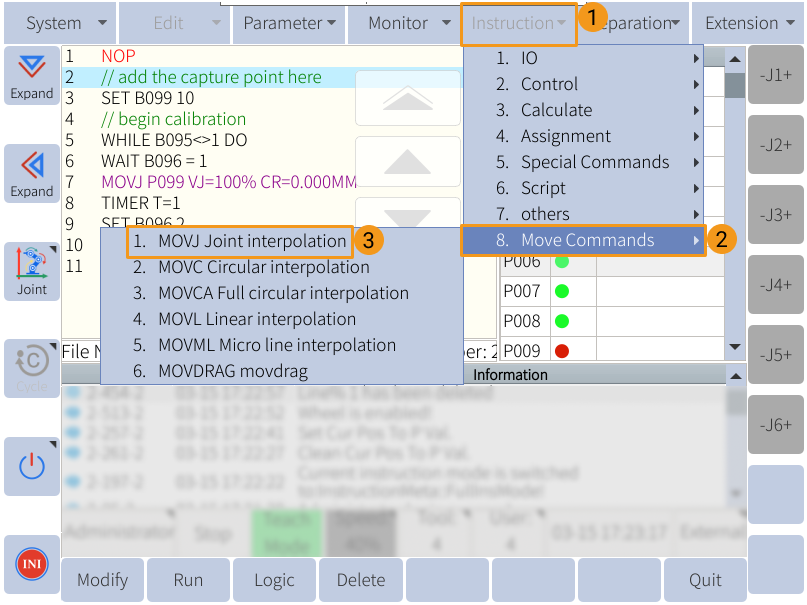
Sélectionnez la variable P qui stocke le point de départ de l’étalonnage, et appuyez sur Terminé. Appuyez sur l’interrupteur jaune SERVO ON à l’arrière du boîtier d’apprentissage, et appuyez sur OK en bas à gauche pour confirmer l’insertion de l’instruction de mouvement.
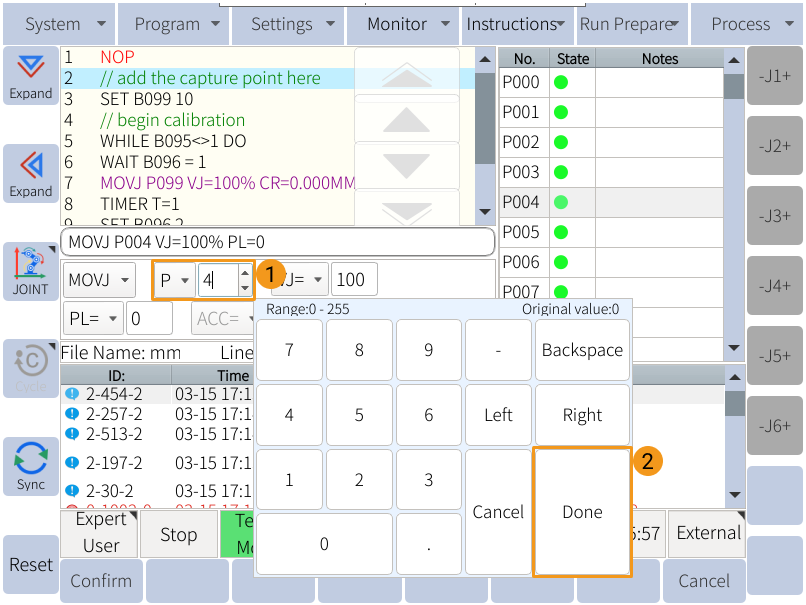

-
Si l’instruction MOVJ est insérée avec succès, vous pouvez voir la commande suivante à la ligne 3 du programme.
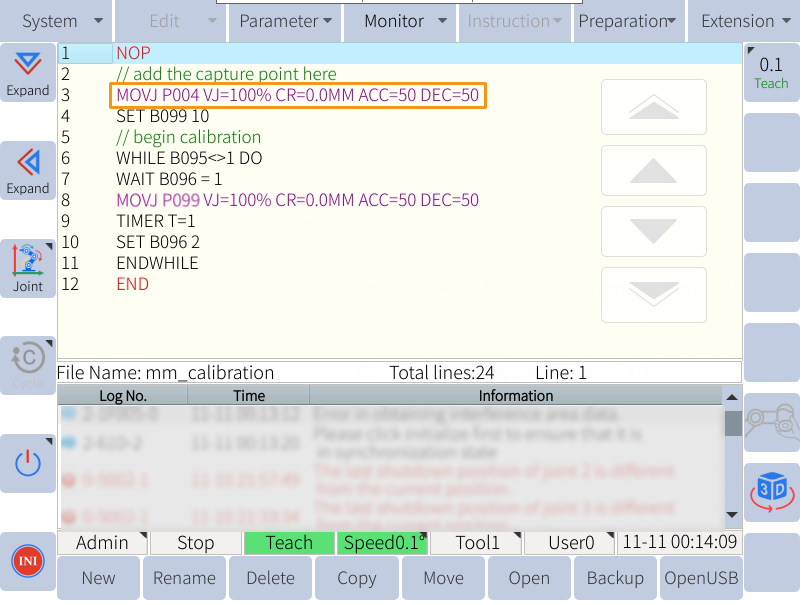
|
Choisissez le type d’instruction de mouvement (MOVJ ou MOVL) en fonction de la situation réelle. Si vous utilisez l’instruction MOVJ, stockez le point de départ de l’étalonnage dans une variable P sous forme de JPs; Si vous utilisez l’instruction MOVL, stockez le point de départ de l’étalonnage dans une* variable V* sous forme de TCP. |
3. Exécuter le programme d’étalonnage
-
Déplacez le curseur à la première ligne du programme, et tournez la clé sur PLAY.
-
Appuyez sur le bouton jaune en bas à droite du boîtier d’apprentissage pour démarrer les servomoteurs, puis appuyez sur le bouton vert pour exécuter automatiquement le programme.

-
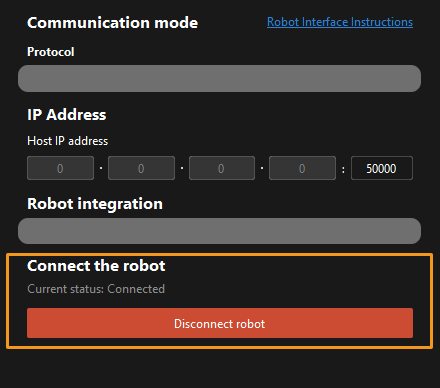
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-