Configurer la communication Standard Interface avec CGXi
Ce sujet présente le processus de configuration de la communication Standard Interface avec un robot CGXi.
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Modèle de robot: G6
-
Modèle de contrôleur: K20
-
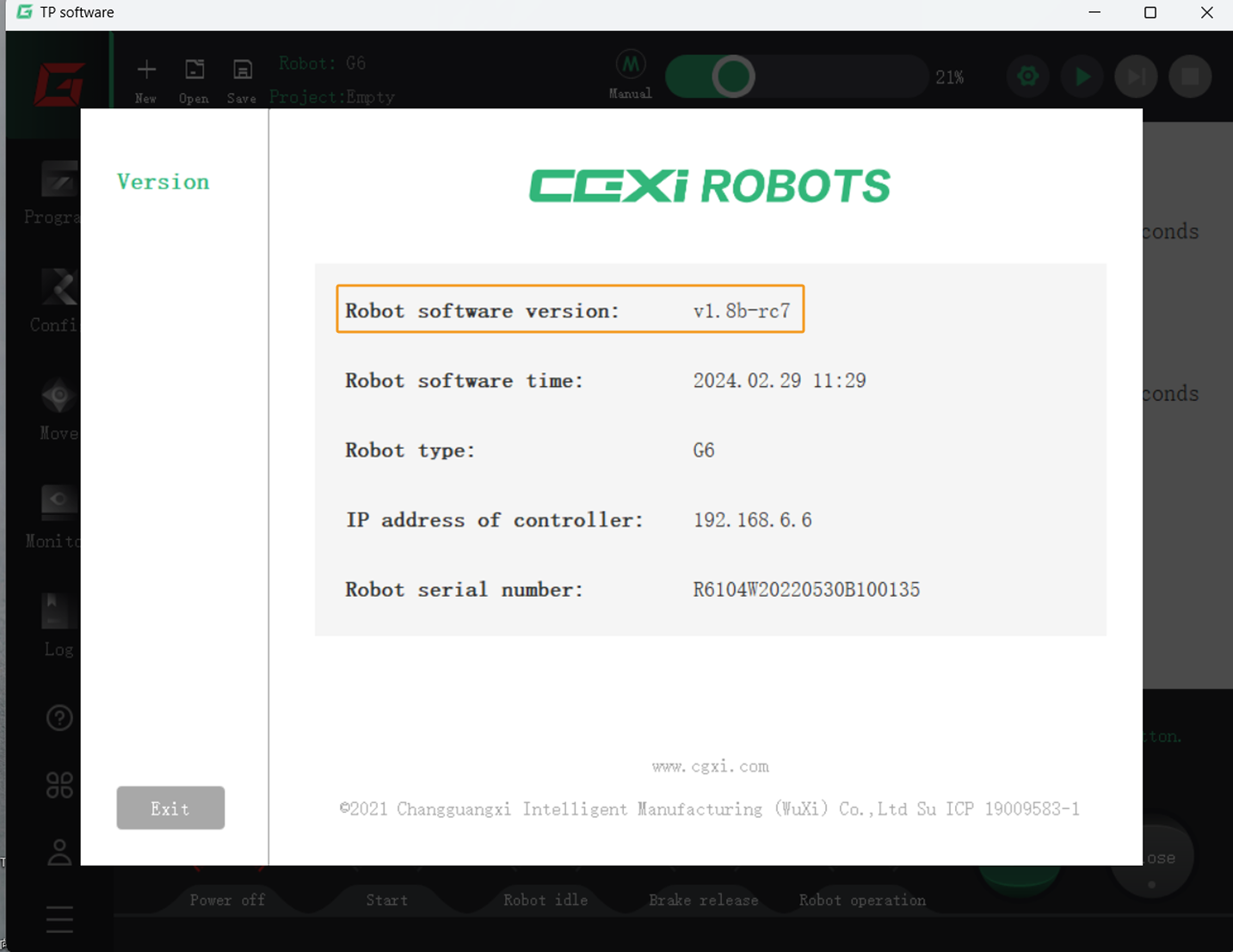
Version du logiciel du robot: v1.8b-rc7
Cliquez ici pour les instructions
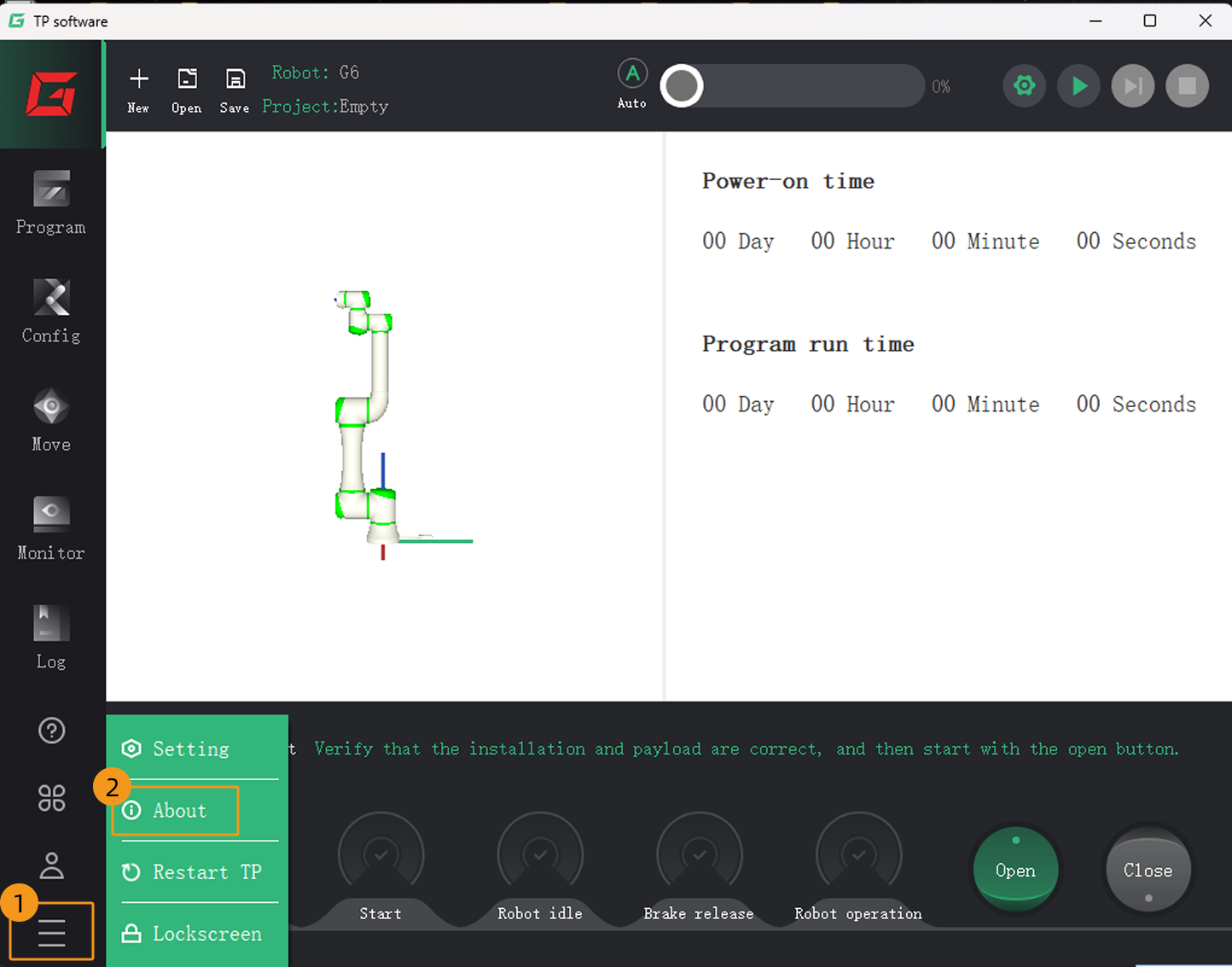
Dans l’interface du pupitre d’apprentissage, sélectionnez pour vérifier la version du logiciel du robot.
Connexion de l’utilisateur
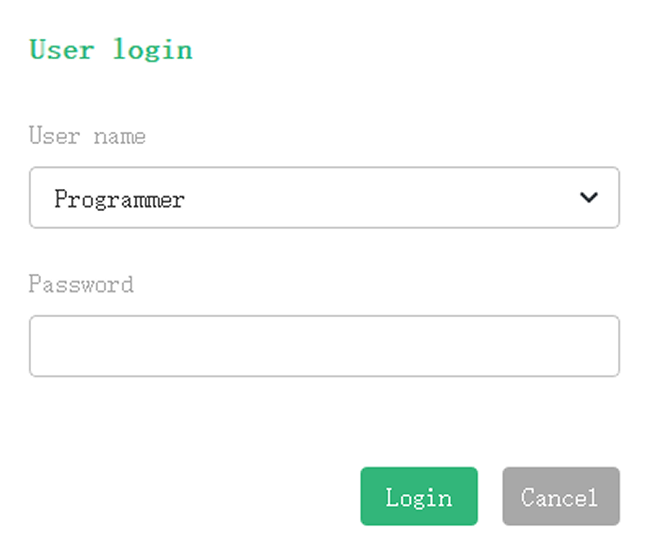
Pendant le fonctionnement, la boîte de dialogue de connexion peut parfois apparaître automatiquement sur l’interface du pupitre d’apprentissage. À ce moment-là, sélectionnez Programmeur comme nom d’utilisateur, saisissez admin comme mot de passe, puis touchez Connexion pour continuer.
Configurer la connexion réseau
Connecter le matériel
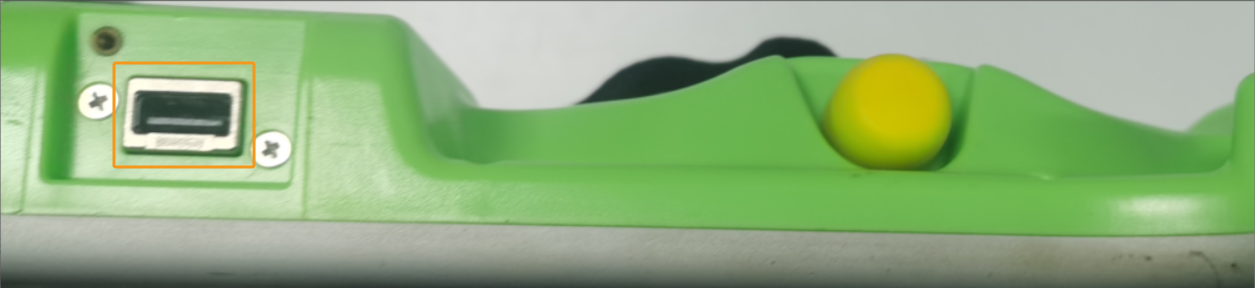
Branchez une extrémité du câble Ethernet sur le port de l’IPC et l’autre extrémité sur le port LAN1 du contrôleur du robot. La figure suivante montre un exemple de port LAN1.

Définir l’adresse IP
-
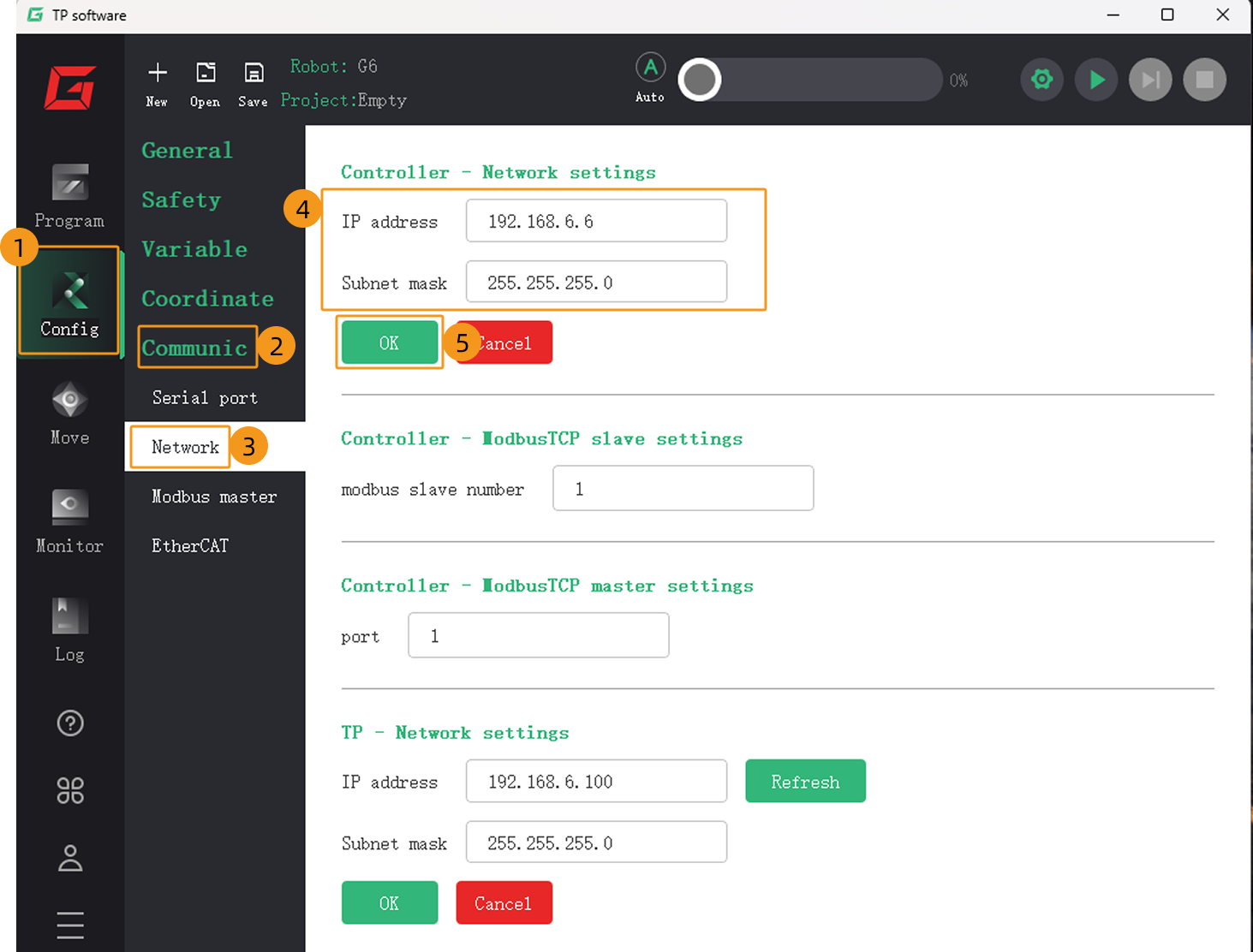
Sur l’interface du pupitre d’apprentissage, touchez pour ouvrir la page des paramètres réseau. Sous Contrôleur – Paramètres réseau, saisissez l’adresse IP du contrôleur et le masque de sous-réseau, puis touchez OK.
-
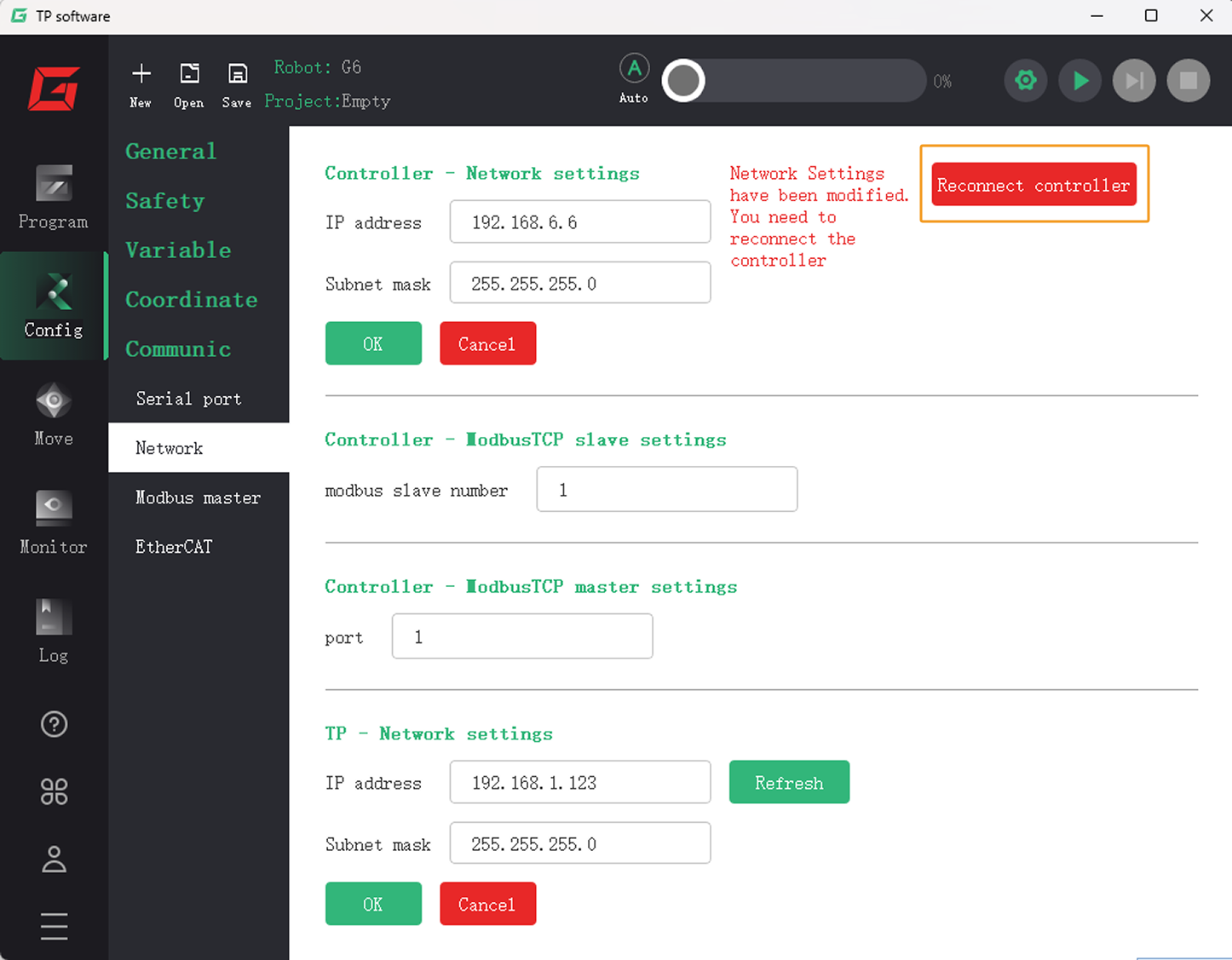
Dans l’angle supérieur droit, touchez Reconnecter le contrôleur pour que les paramètres réseau ci-dessus prennent effet.
-
Dans l’IPC, définir l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, les adresses IP de l’IPC et du contrôleur du robot doivent résider dans le même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 sont sur le même sous-réseau.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
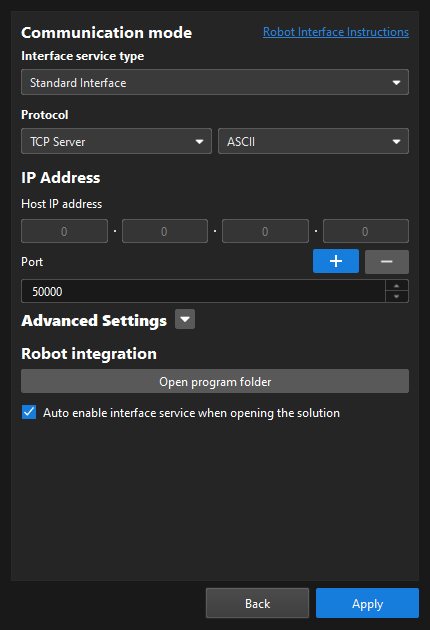
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme sur le robot
-
Copiez le dossier
mmdans le dossier de programme ouvert (le dossierCGXI) sur la clé USB.Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/CGXIdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Branchez la clé USB dans le port USB à l’arrière du pupitre d’apprentissage du robot.
-
Sur l’interface du pupitre d’apprentissage, touchez Ouvrir, accédez au dossier
programdu système du contrôleur. Ensuite, touchez Nouveau dossier pour créer un nouveau dossier nommémm. Après la création du dossier, touchez Annuler pour revenir à l’interface principale.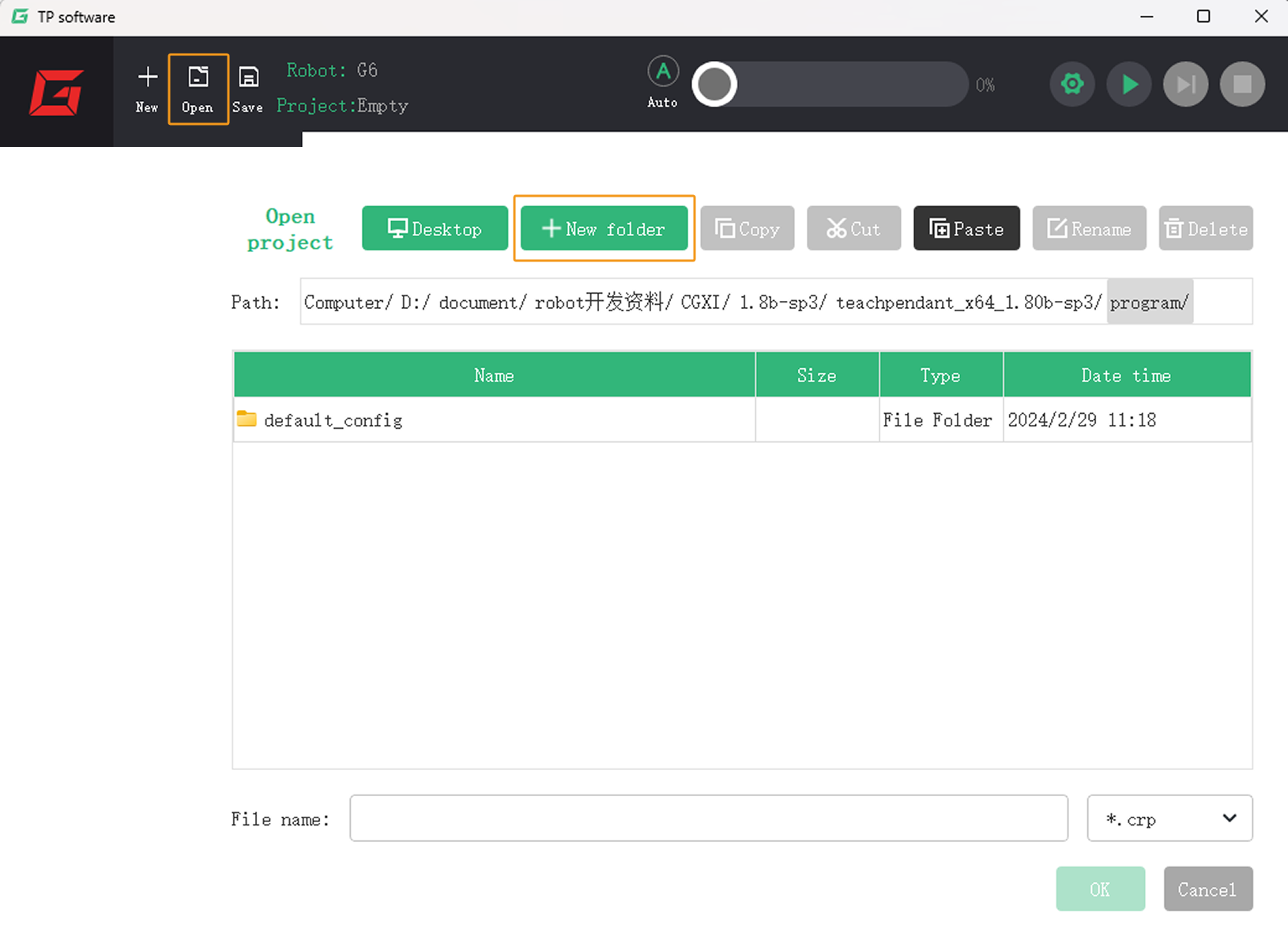
-
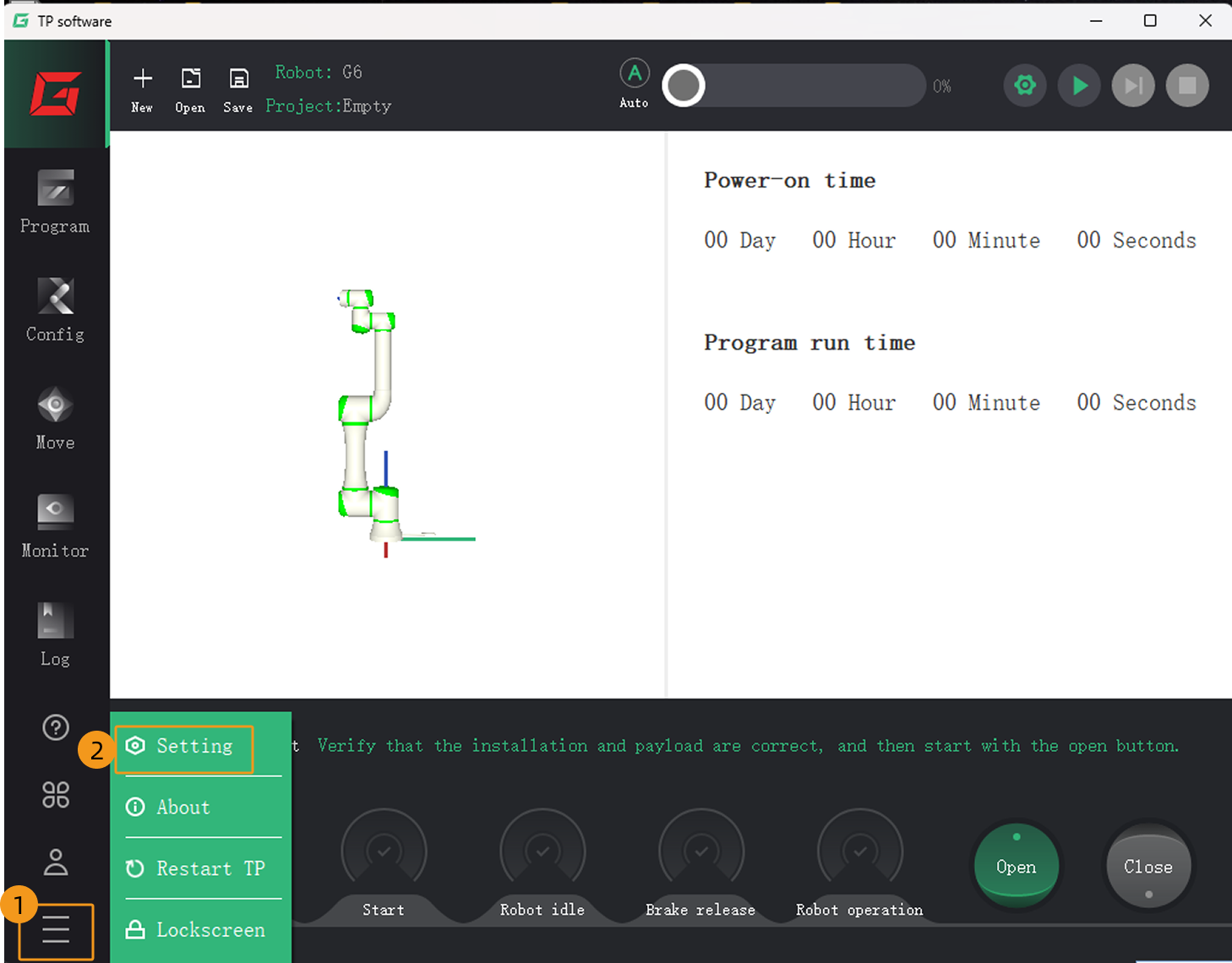
Sur l’interface principale du pupitre d’apprentissage, touchez le .
-
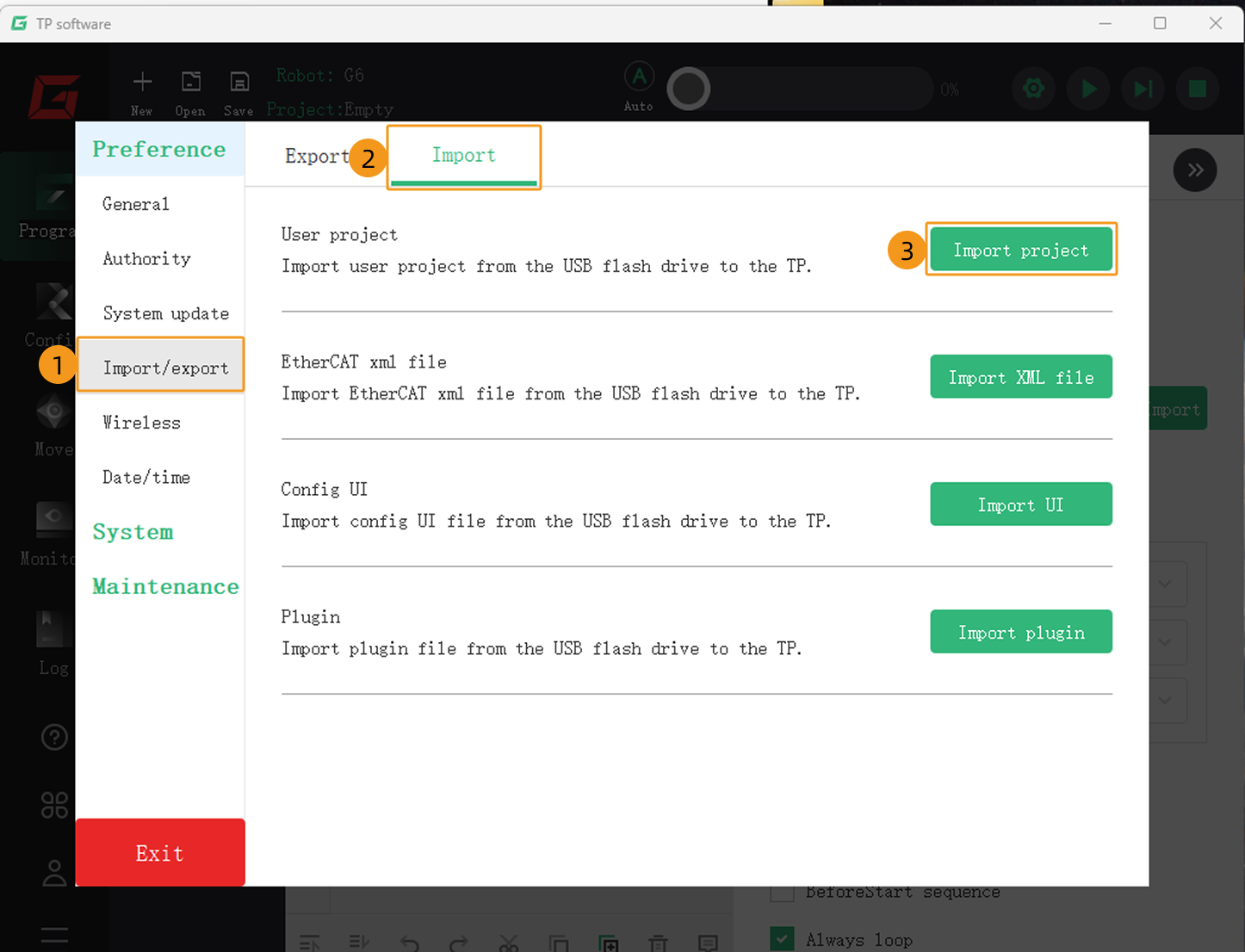
Sur l’interface suivante, touchez .
-
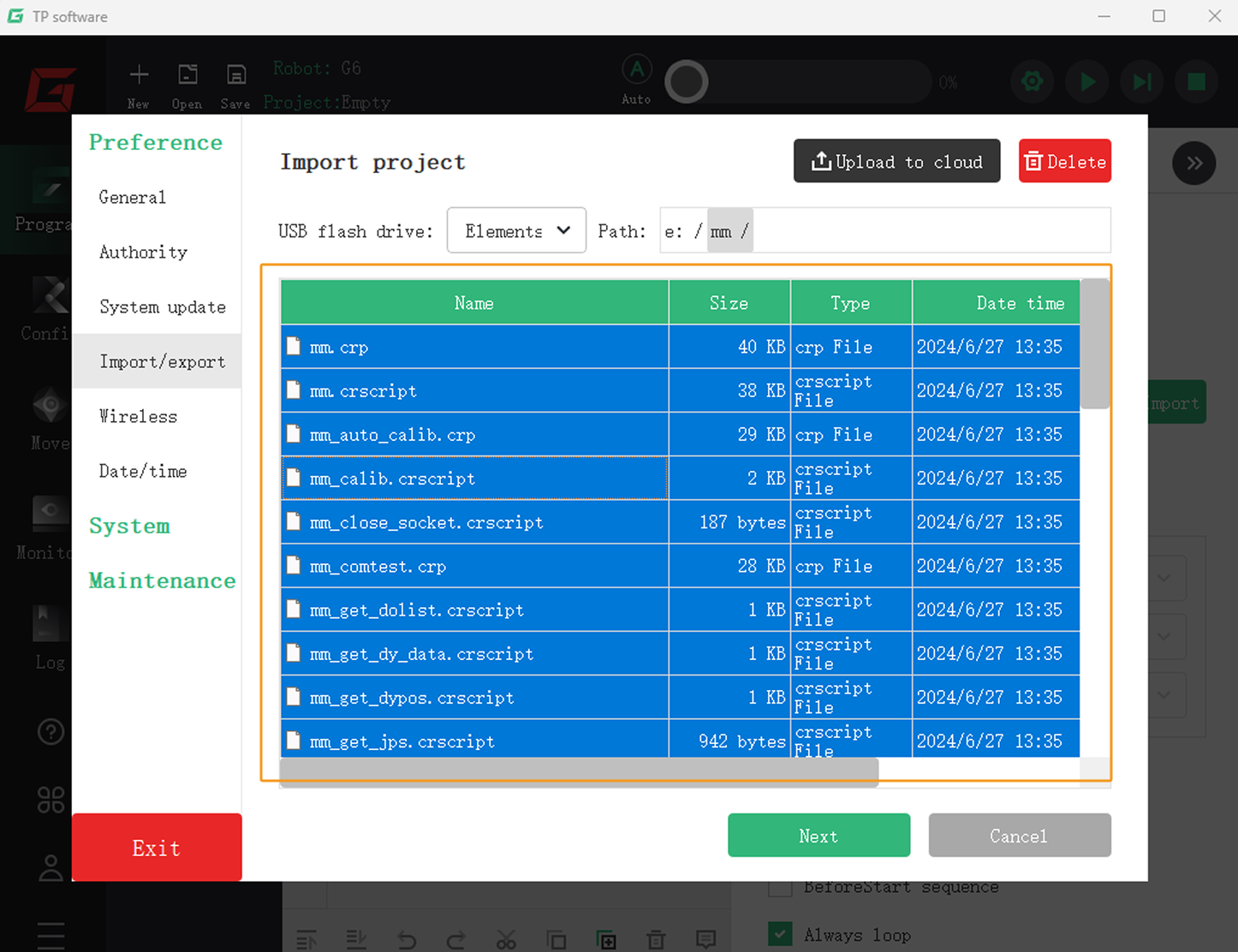
Sur la page Importer un projet, les dossiers sur la clé USB seront affichés. Appuyez deux fois sur le dossier
mmpour y entrer, faites glisser pour sélectionner tous les fichiers, puis touchez Suivant.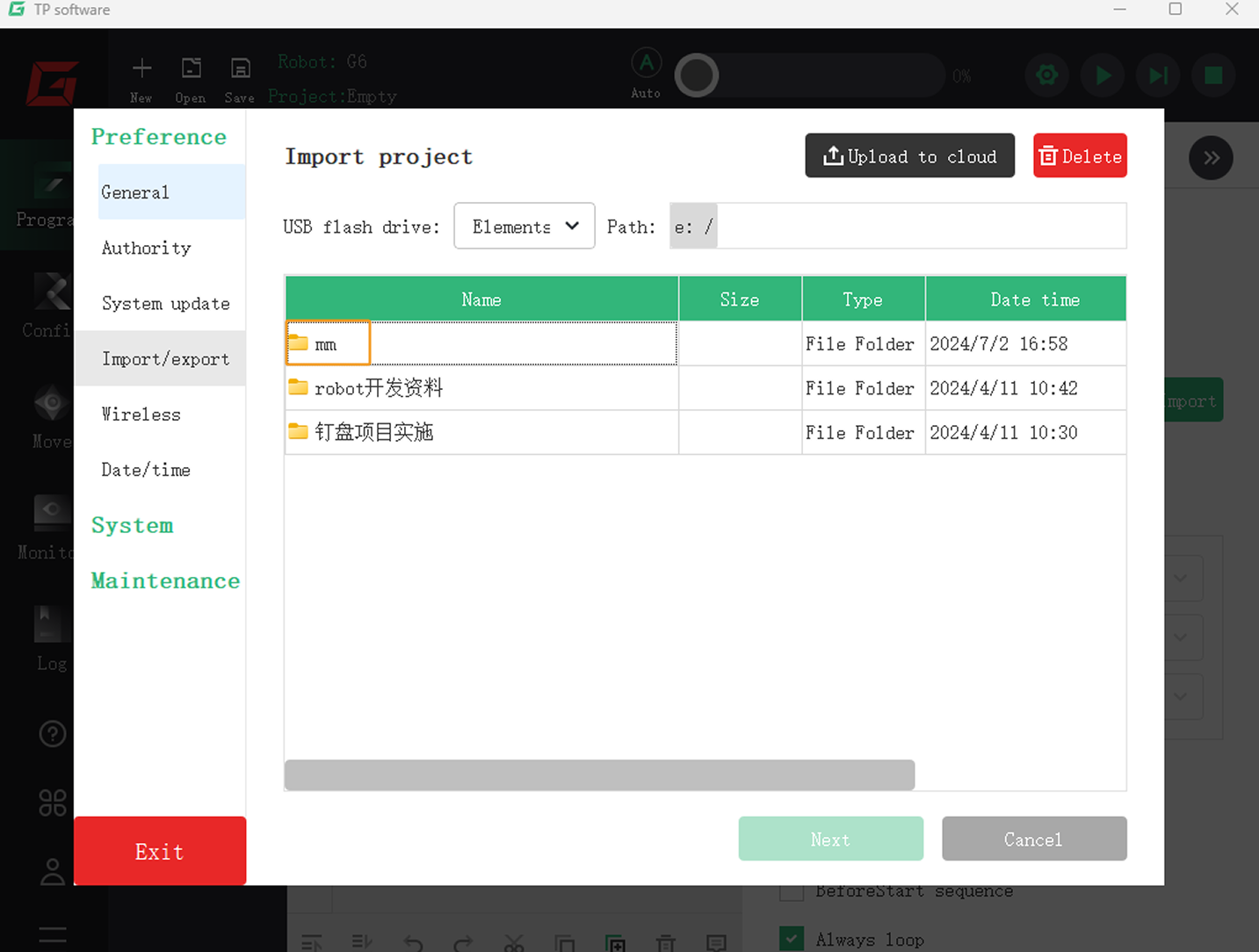
-
Le chemin basculera automatiquement vers le dossier
programdu système du contrôleur. Appuyez deux fois pour ouvrir le dossiermmnouvellement créé, puis touchez OK.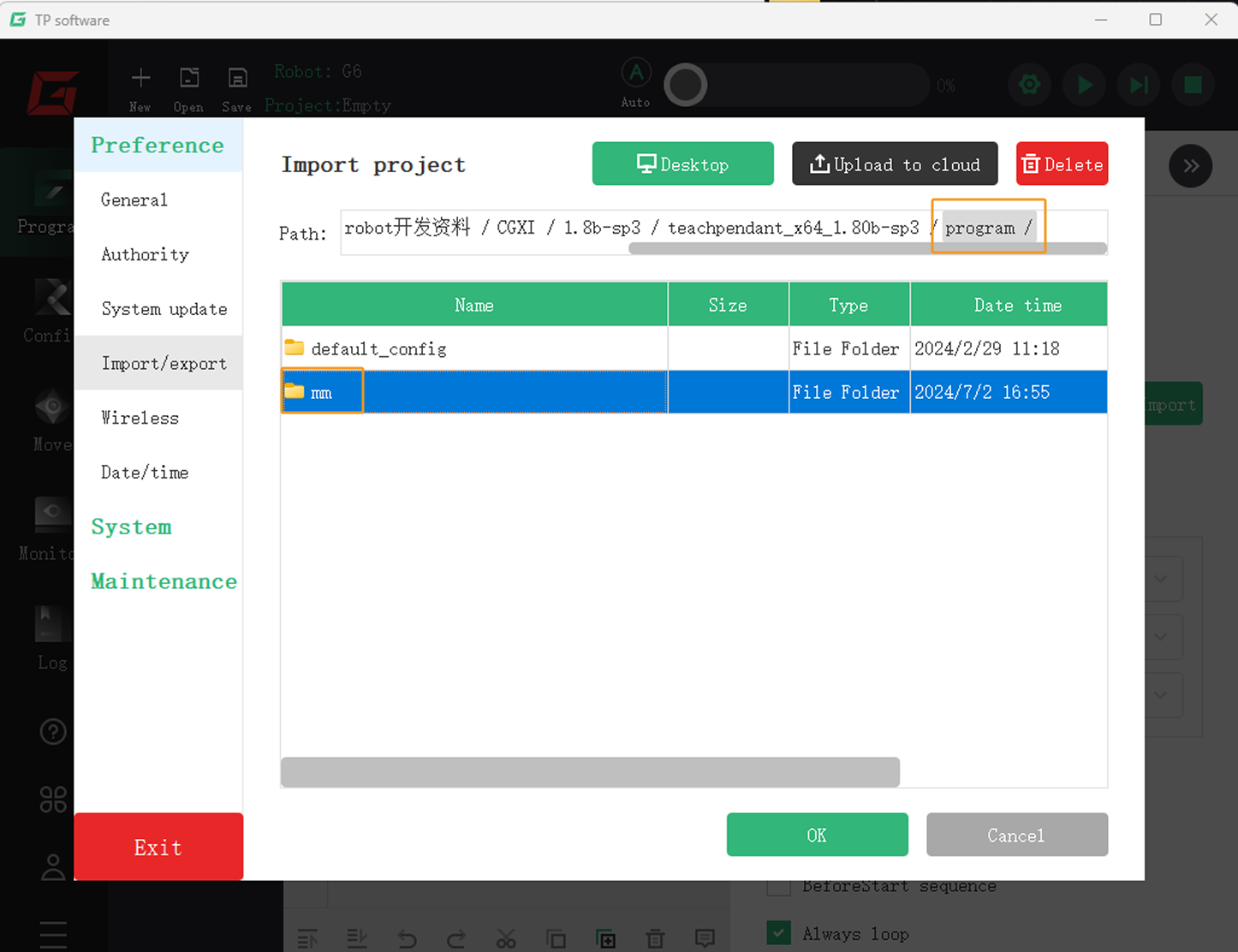
-
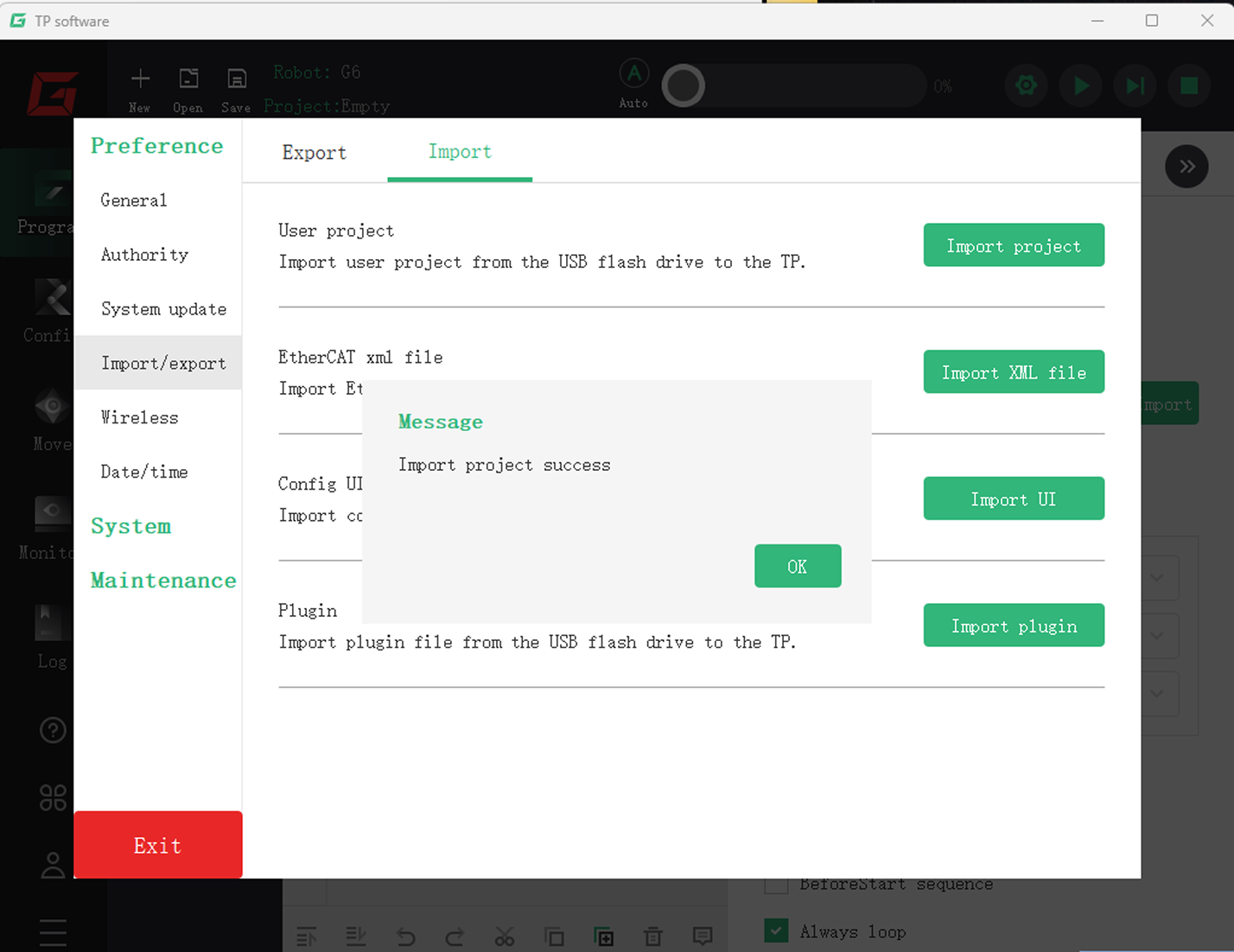
Si les fichiers sont importés avec succès, un message Importation du projet réussie apparaîtra. Touchez OK, puis touchez Quitter.
-
Revenez à l’interface principale du pupitre d’apprentissage, touchez Ouvrir, puis appuyez deux fois sur le dossier
mmpour afficher les fichiers importés.Assurez-vous de sélectionner Tous les fichiers comme type de fichier dans l’angle inférieur droit. 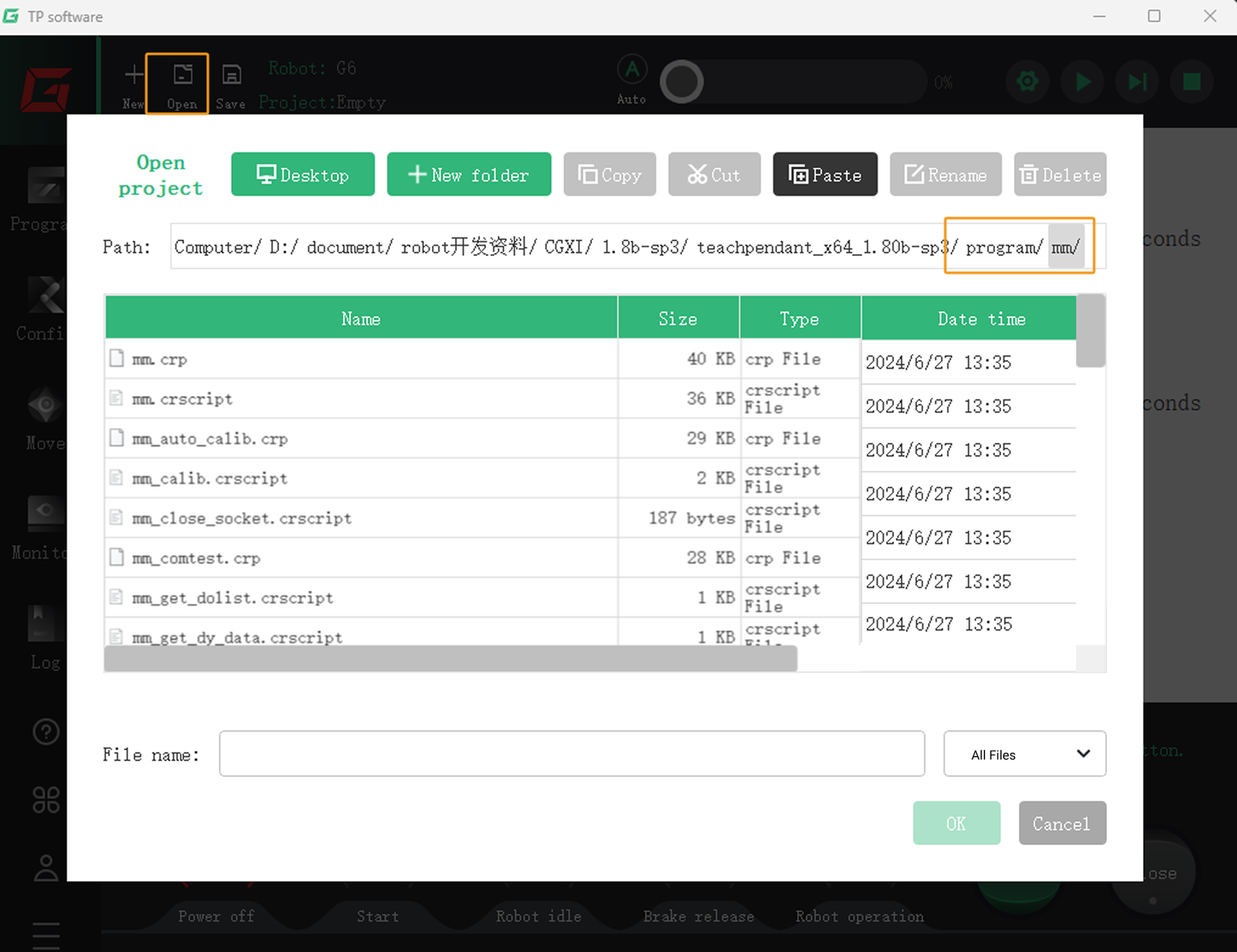
Tester la communication Standard Interface
Sélectionner et modifier le programme utilisé pour le test de communication
-
Sur l’interface principale du pupitre d’apprentissage, touchez Ouvrir, appuyez deux fois sur le dossier
mmpour y entrer, sélectionnez le fichiermm.crp, puis touchez OK.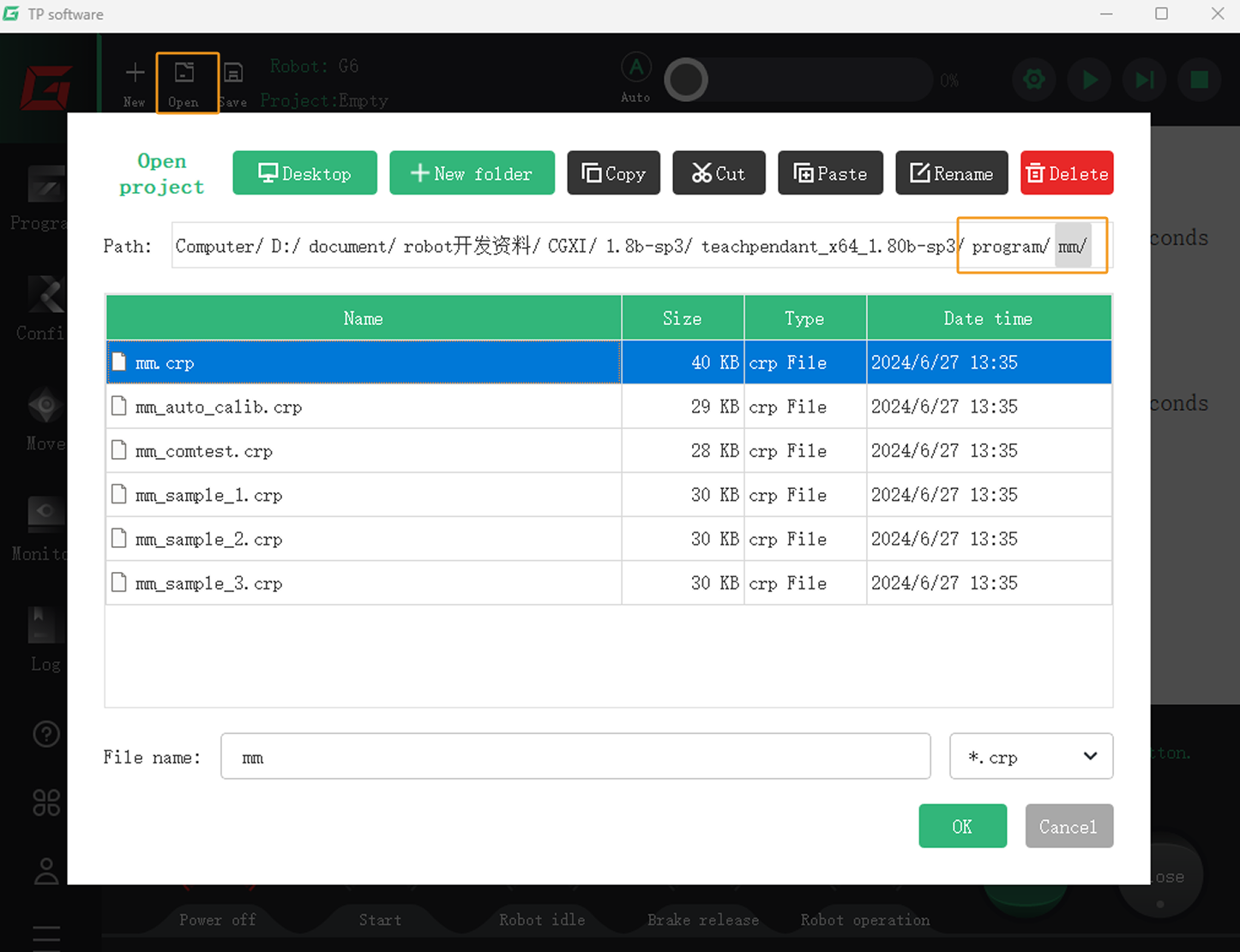
-
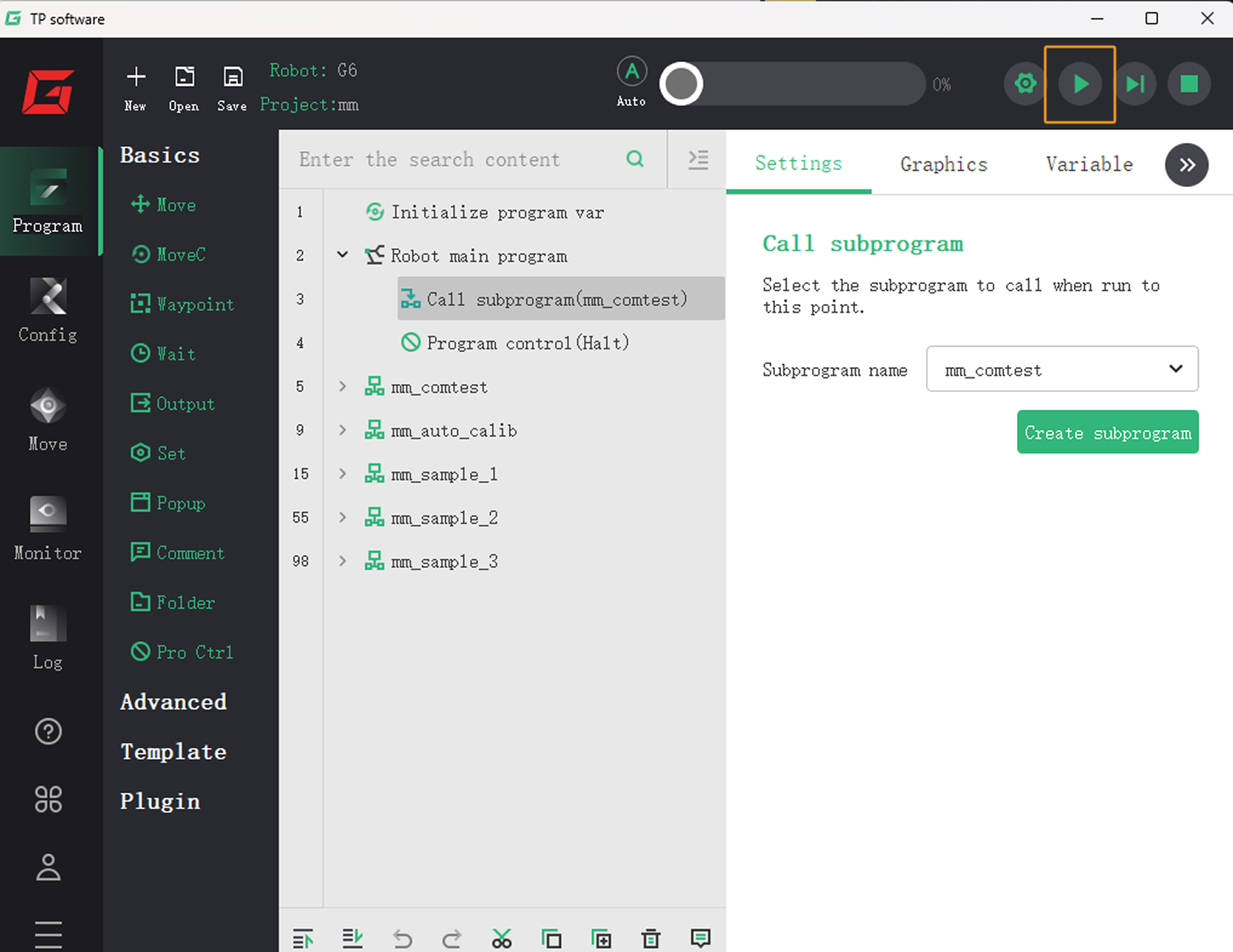
Revenez à l’interface principale du pupitre d’apprentissage et touchez Programme sur le côté gauche. Dans le Programme principal du robot, définissez le nom de Appeler le sous-programme sur mm_comtest.
Le programme mm_comtest est utilisé pour tester la communication entre le robot et le système de vision. Si vous avez besoin d’exécuter un autre programme, changez le nom du sous-programme en conséquence. 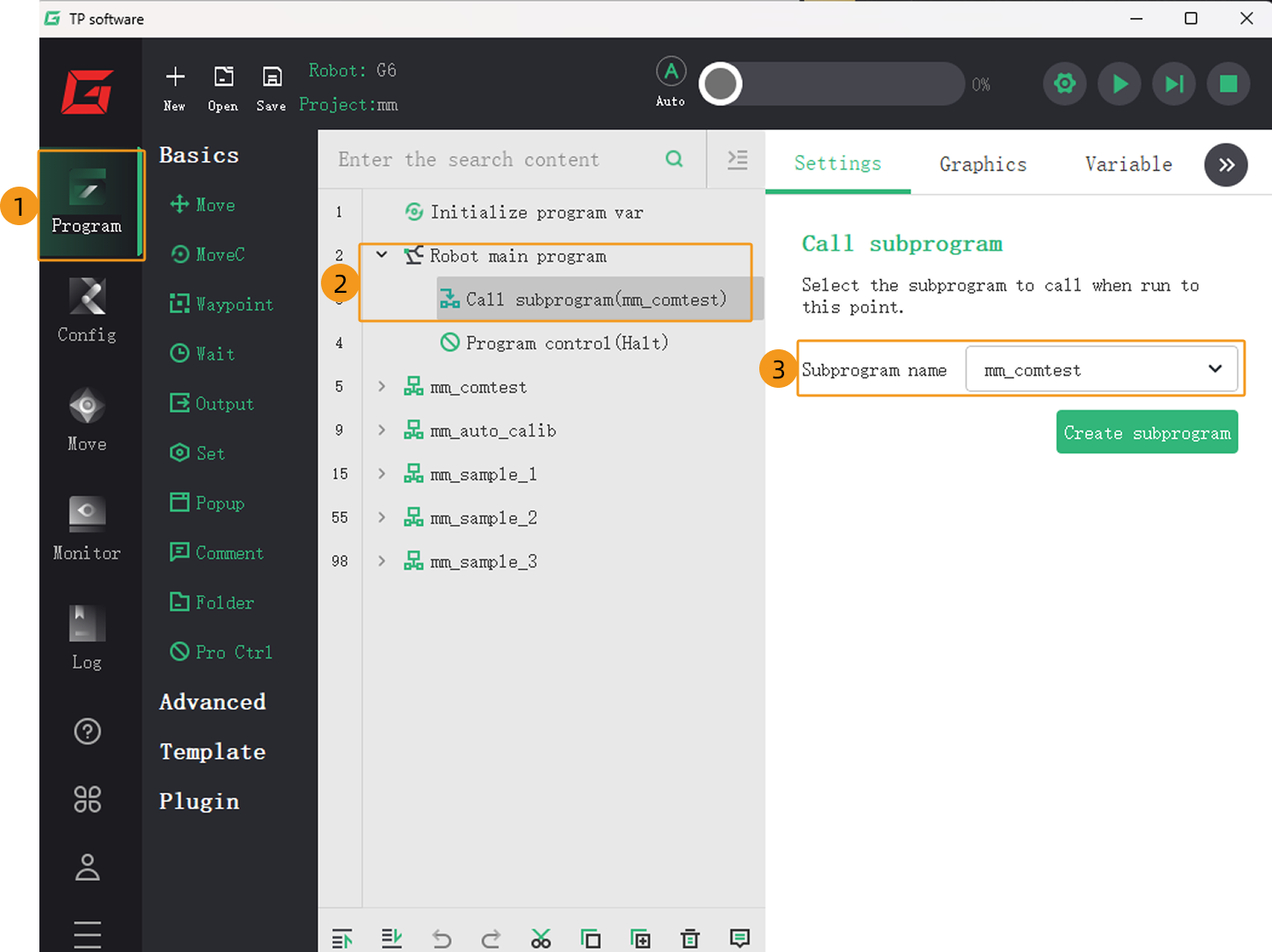
-
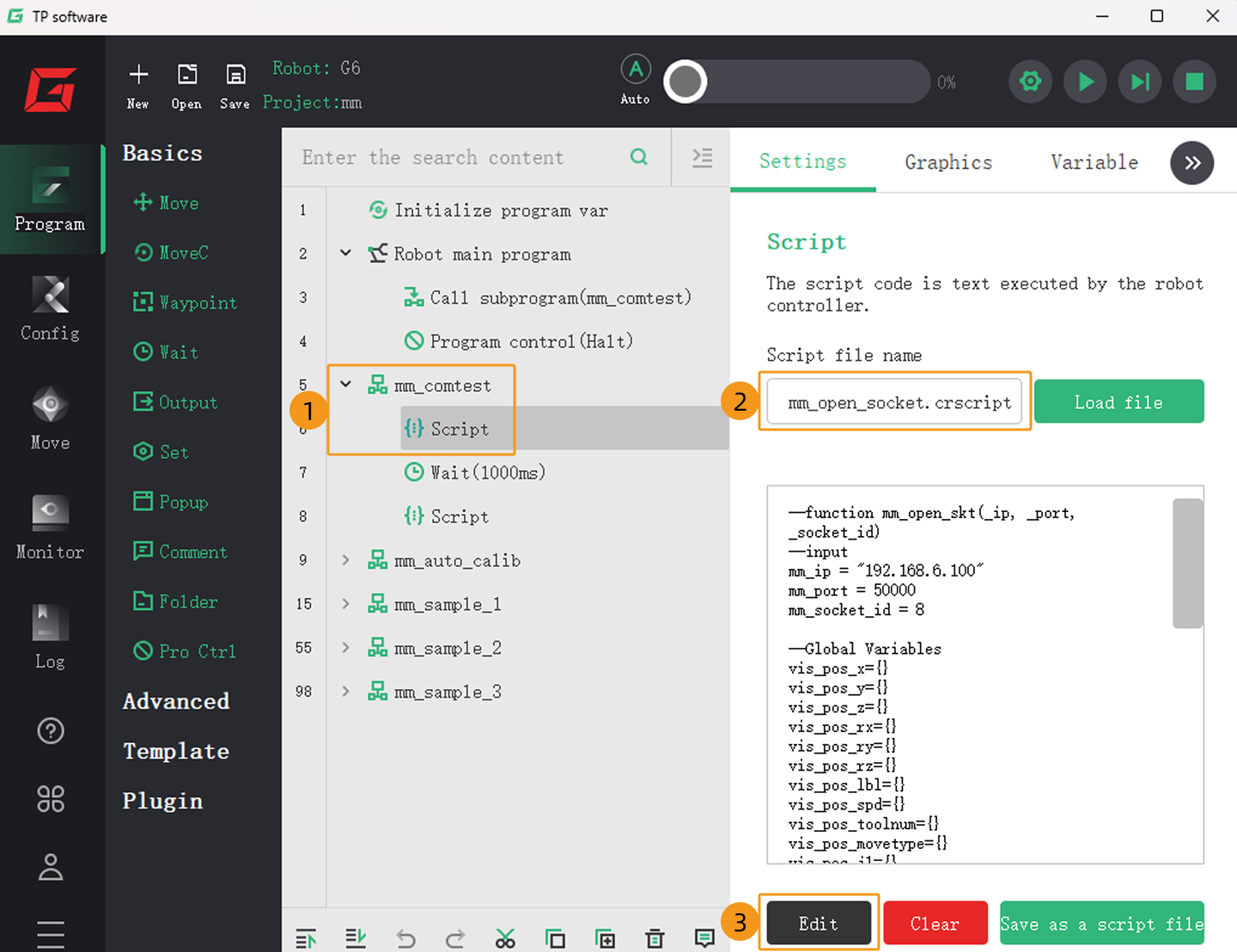
Sur l’interface suivante, ouvrez le sous-programme mm_comtest et sélectionnez le premier fichier de script (mm_open_socket.crscript).
-
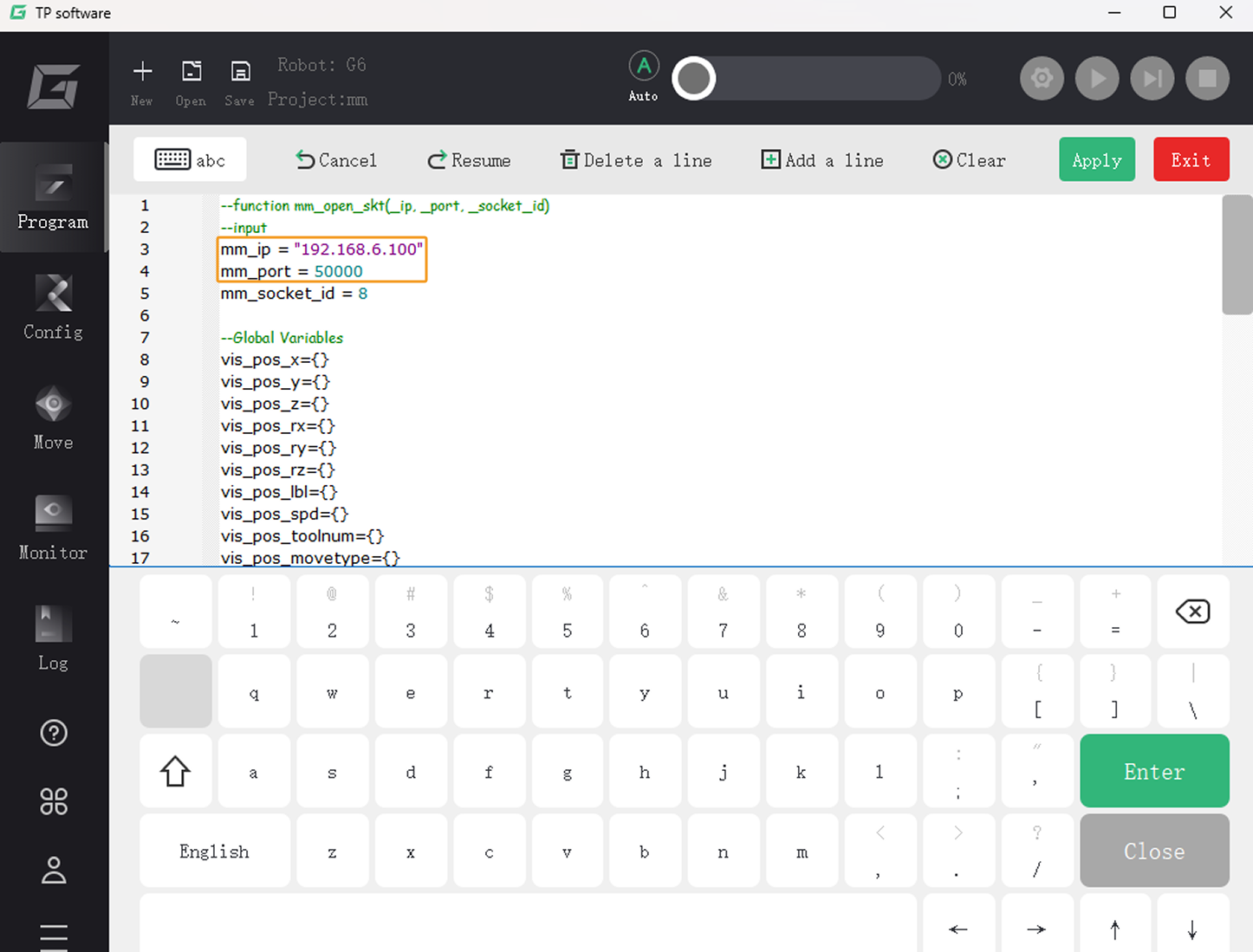
Touchez Modifier, remplacez la valeur de la variable mm_ip par l’adresse IP de l’IPC, et remplacez la valeur de la variable mm_port par le port hôte configuré dans Mech-Vision. Puis touchez Appliquer.
Exécuter le programme et tester la connexion
-
Sur l’interface principale du pupitre d’apprentissage, touchez le bouton Exécuter dans l’angle supérieur droit pour exécuter le programme mm_comtest.
-
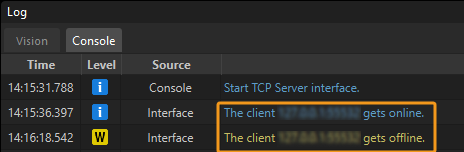
Si la communication entre le robot et le système de vision est configurée, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.