Programme d’exemple 4 : MM_S4_Vis_ChangeModel
Présentation du programme
Description |
Le robot bascule la recette de paramètres Mech-Vision, puis déclenche l’exécution du projet Mech-Vision afin d’obtenir le résultat de vision pour la prise et la dépose. |
||
Chemin du fichier |
Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin |
||
Projet |
projet Mech-Vision
|
||
Prérequis |
|
| Ce programme d’exemple est fourni uniquement à titre de référence. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette partie décrit le programme d’exemple MM_S4_Vis_ChangeModel.
| La seule différence entre le programme d’exemple MM_S4_Vis_ChangeModel et le programme d’exemple MM_S1_Vis_Basic est que MM_S4_Vis_ChangeModel peut basculer la recette de paramètres dans le projet Mech-Vision (le code de cette fonctionnalité est en gras). Par conséquent, seule la fonctionnalité de basculement de la recette de paramètres est décrite dans la partie suivante. Pour obtenir des informations sur les parties de MM_S4_Vis_ChangeModel qui sont cohérentes avec celles de MM_S1_Vis_Basic, voir Programme d’exemple 1 : MM_S1_Vis_Basic. |
1: !-------------------------------- ;
2: !FUNCTION: trigger Mech-Vision ;
3: !project after switching recipe ;
4: !and get vision result ;
5: !Mech-Mind, 2023-12-25 ;
6: !-------------------------------- ;
7: ;
8: !set current uframe NO. to 0 ;
9: UFRAME_NUM=0 ;
10: !set current tool NO. to 1 ;
11: UTOOL_NUM=1 ;
12: !move to robot home position ;
13:J P[1] 100% FINE ;
14: !initialize communication ;
15: !parameters(initialization is ;
16: !required only once) ;
17: CALL MM_INIT_SKT('8','127.0.0.1',50000,5) ;
18: !move to image-capturing position ;
19:L P[2] 1000mm/sec FINE ;
20: !switch recipe of NO.1 ;
21: !Mech-Vision project, ;
22: !"MM_SET_MOD(Proj_num,Model_num)" ;
23: CALL MM_SET_MOD(1,1) ;
24: !trigger NO.1 Mech-Vision project ;
25: CALL MM_START_VIS(1,0,2,10) ;
26: !get vision result from NO.1 ;
27: !Mech-Vision project ;
28: CALL MM_GET_VIS(1,51,53) ;
29: !check whether vision result has ;
30: !been got from Mech-Vision ;
31: !successfully ;
32: IF R[53]<>1100,JMP LBL[99] ;
33: !save first vision point data to ;
34: !local variables ;
35: CALL MM_GET_POS(1,60,70,80) ;
36: !move to intermediate waypoint ;
37: !of picking ;
38:J P[3] 50% CNT100 ;
39: !move to approach waypoint ;
40: !of picking ;
41:L PR[60] 1000mm/sec FINE Tool_Offset,PR[1] ;
42: !move to picking waypoint ;
43:L PR[60] 300mm/sec FINE ;
44: !add object grasping logic here, ;
45: !such as "DO[1]=ON" ;
46: PAUSE ;
47: !move to departure waypoint ;
48: !of picking ;
49:L PR[60] 1000mm/sec FINE Tool_Offset,PR[1] ;
50: !move to intermediate waypoint ;
51: !of placing ;
52:J P[4] 50% CNT100 ;
53: !move to approach waypoint ;
54: !of placing ;
55:L P[5] 1000mm/sec FINE Tool_Offset,PR[2] ;
56: !move to placing waypoint ;
57:L P[5] 300mm/sec FINE ;
58: !add object releasing logic here, ;
59: !such as "DO[1]=OFF" ;
60: PAUSE ;
61: !move to departure waypoint ;
62: !of placing ;
63:L P[5] 1000mm/sec FINE Tool_Offset,PR[2] ;
64: !move back to robot home position ;
65:J P[1] 100% FINE ;
66: END ;
67: ;
68: LBL[99:vision error] ;
69: !add error handling logic here ;
70: !according to different ;
71: !error codes ;
72: !e.g.: status=1003 means no ;
73: !point cloud in ROI ;
74: !e.g.: status=1002 means no ;
75: !vision results ;
76: PAUSE ;Le flux de travail correspondant au code du programme d’exemple ci-dessus est illustré dans la figure ci-dessous.
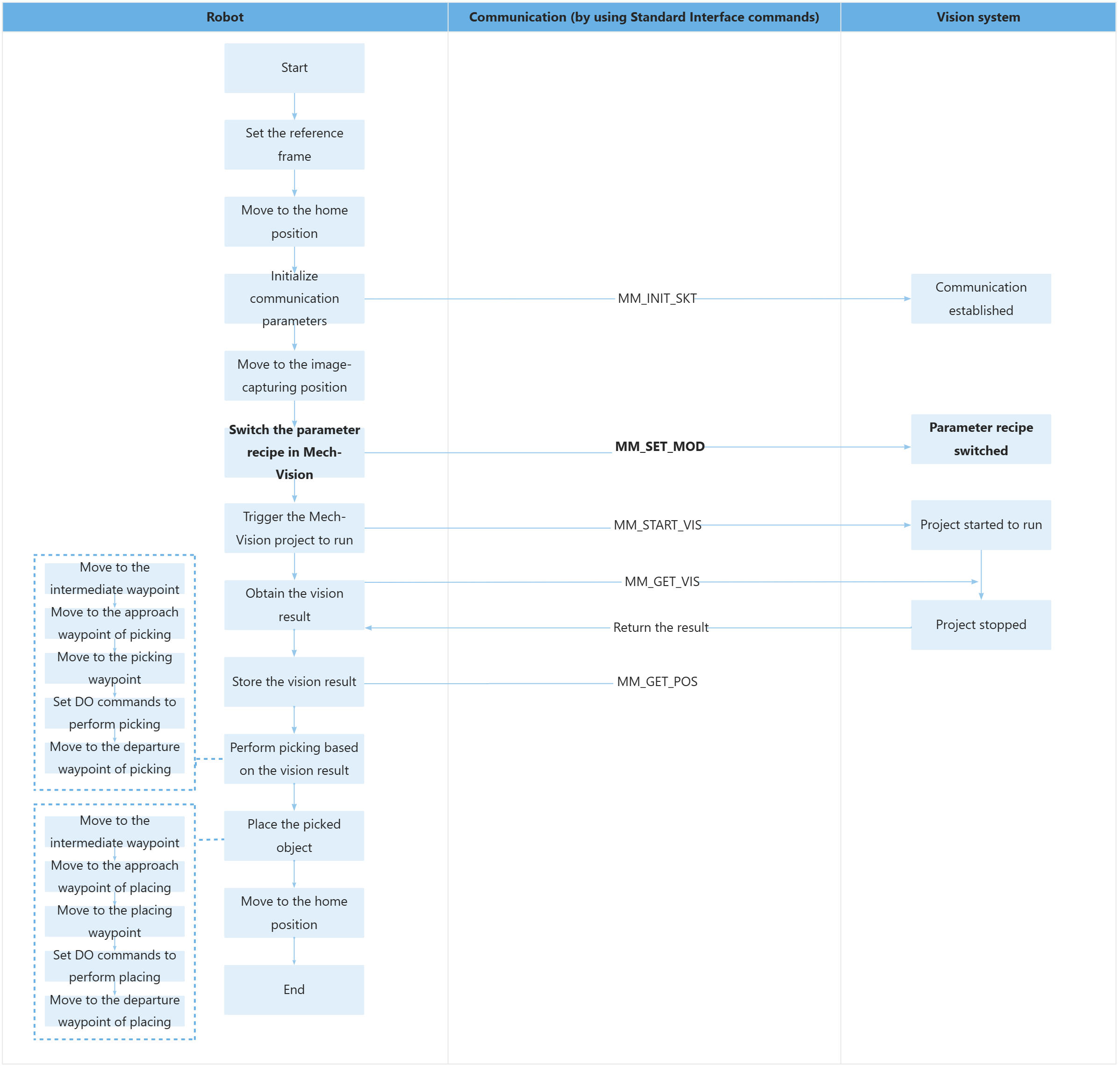
Le tableau ci-dessous décrit le processus de basculement de la recette de paramètres dans le projet Mech-Vision. Vous pouvez cliquer sur le lien hypertexte du nom de la commande pour en consulter la description détaillée.
| Fonctionnalité | Code et description |
|---|---|
Basculer la recette de paramètres Mech-Vision |
Dans cette instruction entière, la recette de paramètres du projet Mech-Vision dont l’ID est 1 est basculée vers la recette 1. |