Configuration de la communication Master-Control
Ce guide vous montre comment charger le programme Master-Control sur un robot FAIRINO et configurer la communication Master-Control entre le robot et le système de vision Mech-Mind.
| Dans cette section, vous allez charger le programme Master-Control du robot dans le système du robot afin d’établir la communication Master-Control entre le système de vision et le robot. |
Préparation
Configurer la connexion réseau
Le port Ethernet du boîtier de boutons est par défaut le port de contrôle du boîtier d’enseignement avec l’adresse IP 192.168.58.2. Par conséquent, vous devez uniquement configurer l’adresse IP de l’IPC comme suit :
-
Connectez le port Ethernet du boîtier de boutons au port Ethernet de l’IPC à l’aide d’un câble Ethernet.
-
Sur l’IPC, ouvrez Google Chrome et saisissez http://192.168.58.2 dans la barre d’adresse pour accéder à la page Web du boîtier d’enseignement.
Le nom d’utilisateur initial est admin et le mot de passe est 123.
Vérifier la compatibilité du contrôleur et du logiciel
Dans la barre latérale gauche, accédez à .
|

Charger les fichiers du programme
-
En mode Manuel, chargez le programme Master-Control comme suit.
-
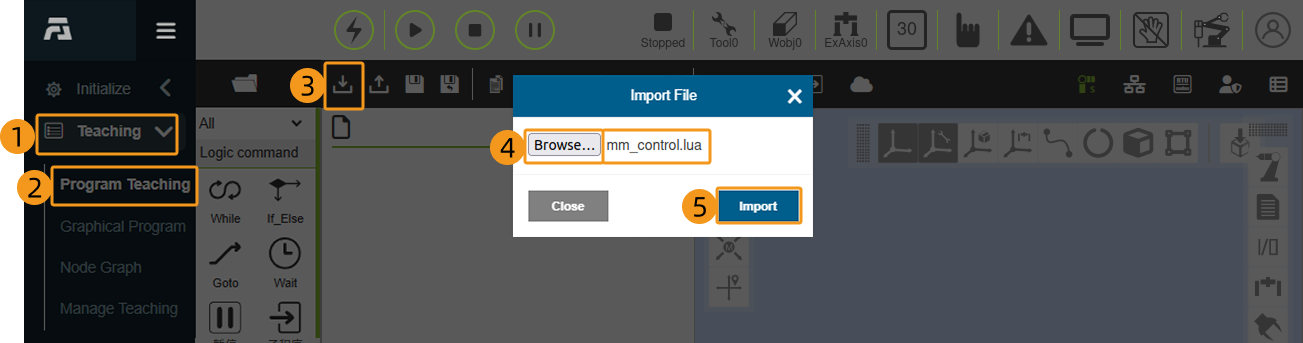
Accédez à . La fenêtre Importer un fichier apparaîtra. Cliquez sur Parcourir…
-
Dans le navigateur de fichiers contextuel, accédez à
Communication Component/Robot_Server/Robot_FullControl/frdepuis le répertoire d’installation de Mech-Vision & Mech-Viz. Sélectionnez le dossier mm_control.lua et cliquez sur Ouvrir. -
Dans la fenêtre Importer un fichier, cliquez sur Importer pour terminer le processus.
-
-
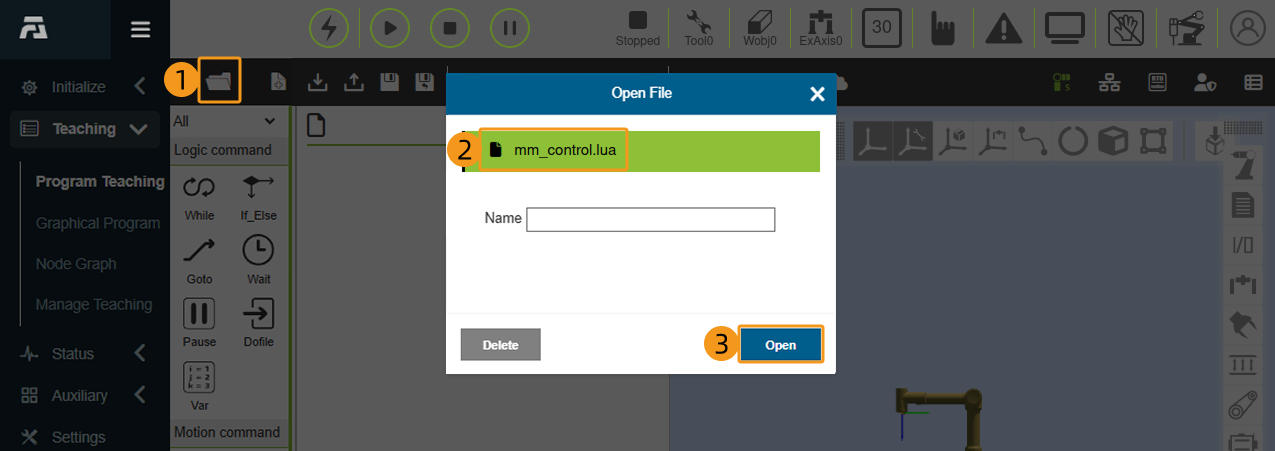
Cliquez sur l’icône de dossier, sélectionnez le fichier mm_control.lua dans la fenêtre contextuelle, puis cliquez sur Ouvrir pour afficher le code détaillé du programme Master-Control.
Tester la communication Master-Control
Créer un projet Mech-Viz
-
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Dans l’interface suivante, cliquez sur Charger la liste des robots en ligne. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
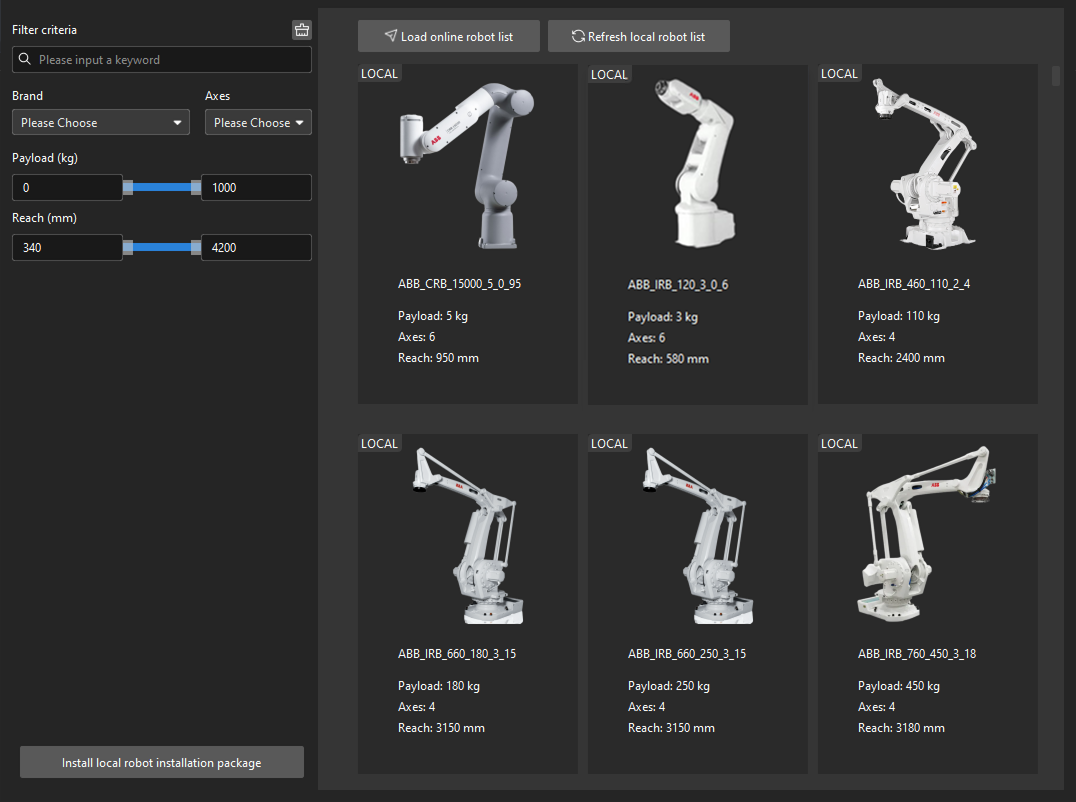
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
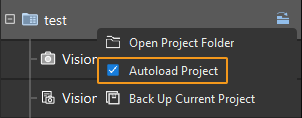
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
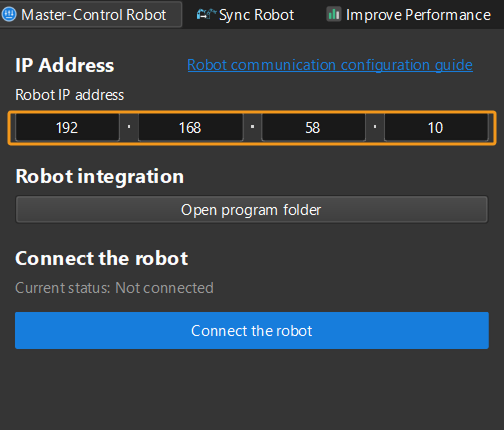
Sélectionnez Robot Master-Control dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP de l’IPC (192.168.58.10) dans Adresse IP du robot et sélectionnez Connecter le robot.
-
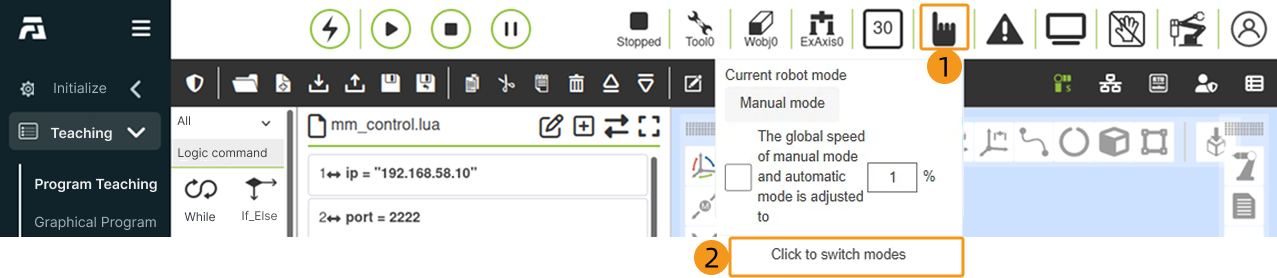
Basculez le robot du mode Manuel au mode Auto comme indiqué sur la figure. De plus, vous pouvez ajuster la vitesse globale selon vos besoins.
-
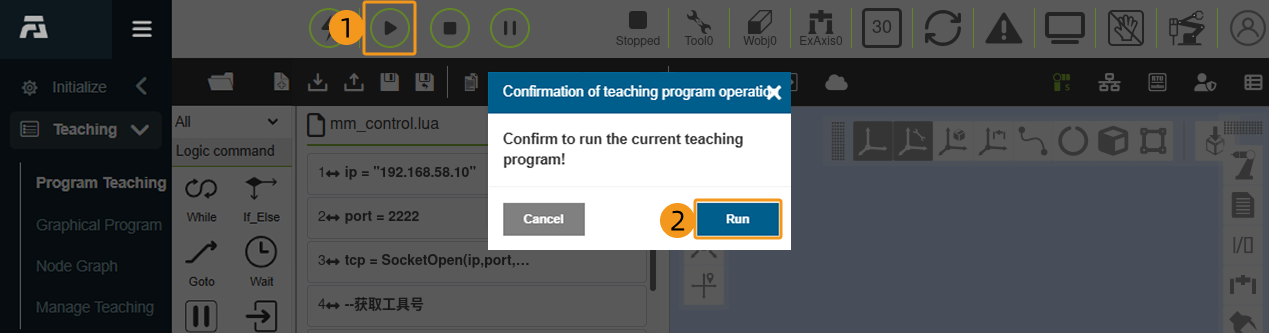
Exécutez le programme conformément aux instructions.
-
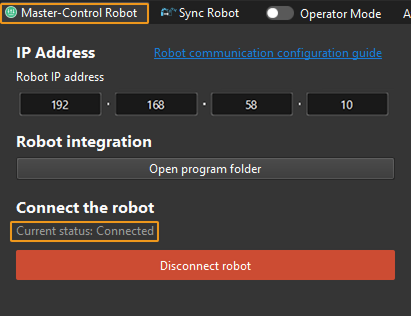
Si Mech-Viz se connecte avec succès au robot réel, l’état actuel passera à Connecté. Par ailleurs, l’icône dans la barre d’outils passera du bleu au vert.
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP de l’IPC, effacer toute alarme du robot et relancer le programme Master-Control.
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, modifiez les paramètres “Vit.” (vitesse) et “Acc.” (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite de nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de “J1”, par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
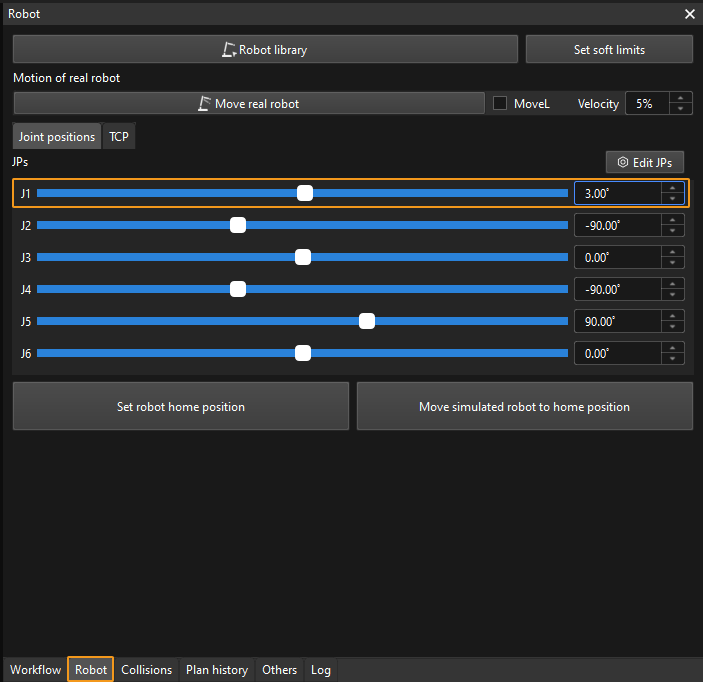
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JP définis pour le robot simulé, la communication Master-Control fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez immédiatement sur le bouton d’arrêt d’urgence du boîtier de boutons ! 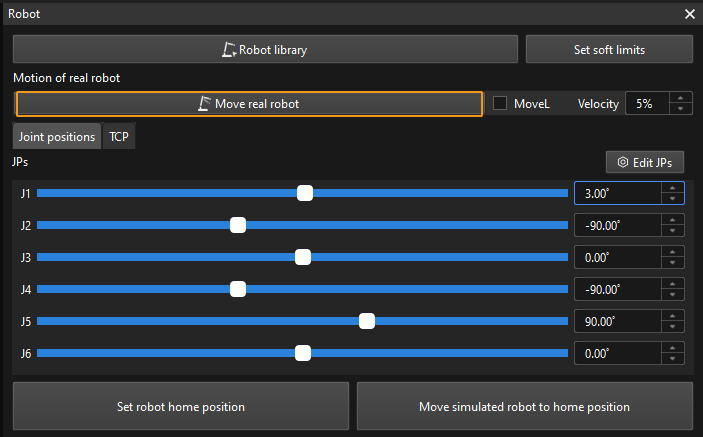
Précautions
-
Si une erreur 500 apparaît sur la page Web du robot, reconnectez le robot dans Mech-Viz et relancez le programme Master-Control.
-
Si une erreur de singularité survient sur la page Web du robot, déplacez manuellement le robot vers une position non singulière, effacez les alarmes et relancez le programme Master-Control.
-
Si le programme Master-Control se fige et que le robot ne parvient pas à recevoir des données depuis Mech-Viz, contactez le fabricant du robot pour mettre à niveau la version du système du contrôleur.
-
Ne mettez pas le robot sous tension lorsque le bouton d’arrêt d’urgence est enfoncé, car cela peut provoquer des erreurs inconnues.
-
Pour toute autre erreur qui ne peut pas être effacée, essayez de redémarrer le robot.