Configuration de la communication Master-Control
Ce guide vous montre comment configurer la communication Master-Control avec un robot Comau.
Préparation
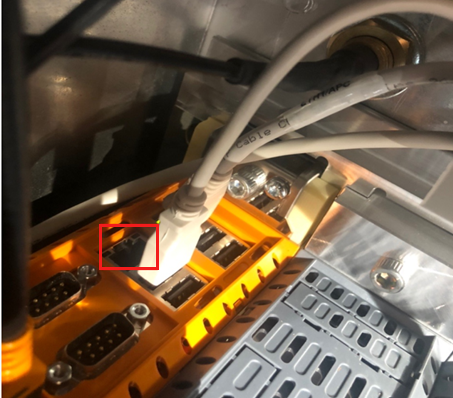
Connecter le matériel
Branchez le câble Ethernet de l’IPC dans le port RJ45 sur le dessus du premier module.

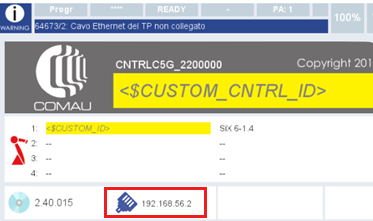
Vérifier l’adresse IP
Appuyez sur la touche menu du pupitre de commande (teach pendant) pour entrer dans l’interface principale. Sélectionnez Accueil pour afficher l’adresse IP du robot.

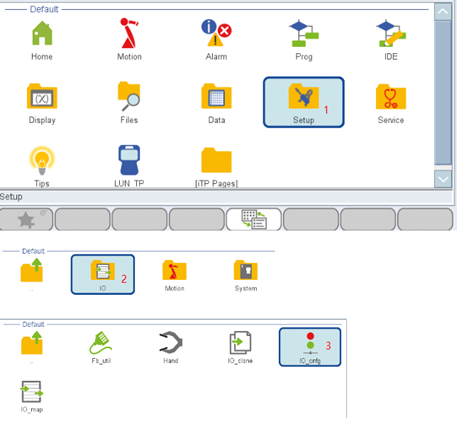
Configurer et associer les E/S
-
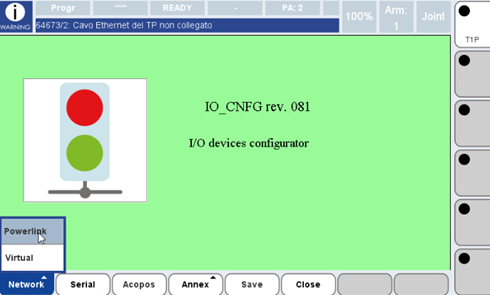
Sélectionnez sur l’interface.
-
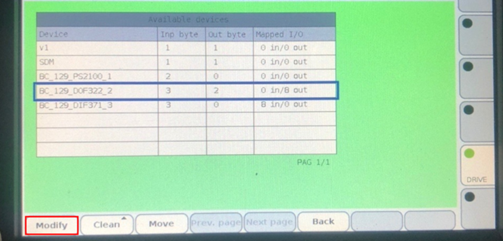
Sélectionnez . La liste des dispositifs d’E/S s’affiche sur cette interface.
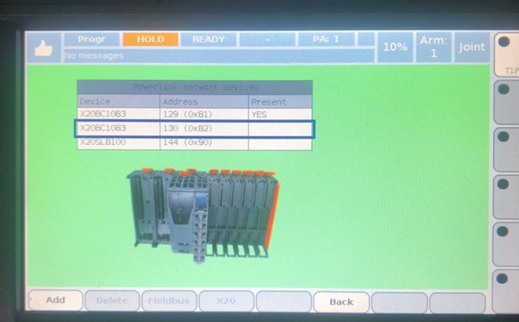
Après vous être assuré que le dispositif est configuré, vous pouvez commencer à configurer le mappage des signaux.
-
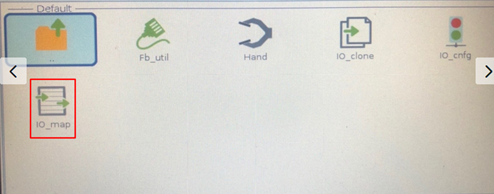
Sélectionnez sur le pupitre de commande (teach pendant).
-
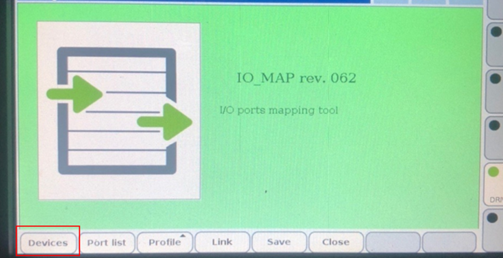
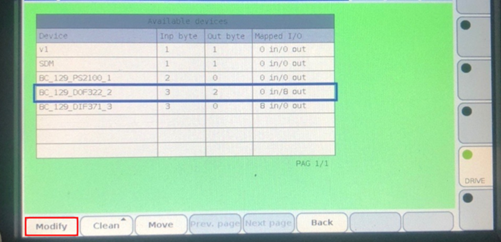
Appuyez sur Appareils, puis sélectionnez le dispositif E/S qui est configuré. Appuyez sur Modifier. Le signal de sortie est pris en exemple dans l’image ci-dessous.
-
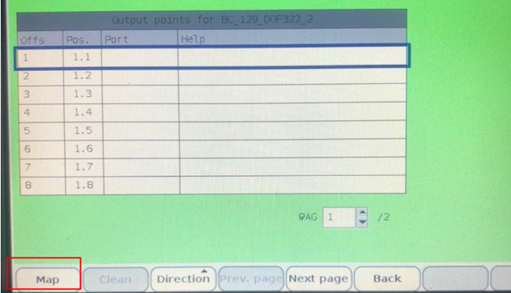
Sélectionnez la première case vide 1.1, puis appuyez sur Associer.
-
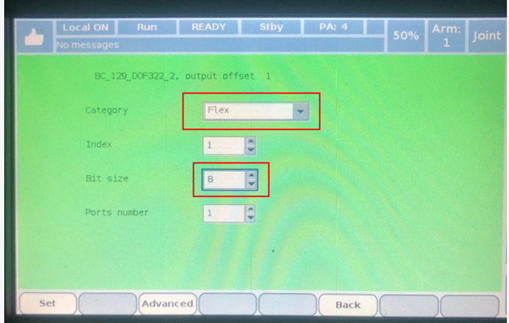
Configurez les paramètres comme sur l’image ci-dessous, puis appuyez sur Définir.
-
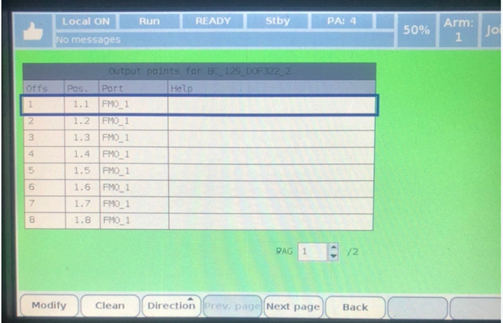
L’image ci-dessous indique que les signaux de sortie sont configurés avec succès. Les 8 chiffres de la variable FMO_1 correspondent aux 8 signaux de sortie sur le dispositif d’E/S.
Les étapes suivantes vous montrent comment configurer les signaux d’entrée. Cliquez sur Retour.
-
Sélectionnez le dispositif d’E/S dont les signaux d’entrée sont configurés. Vous pouvez configurer les signaux d’entrée et de sortie sur le même dispositif ou sur des dispositifs différents. Appuyez sur Modifier.
-
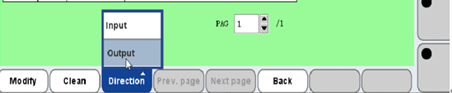
Sélectionnez .
-
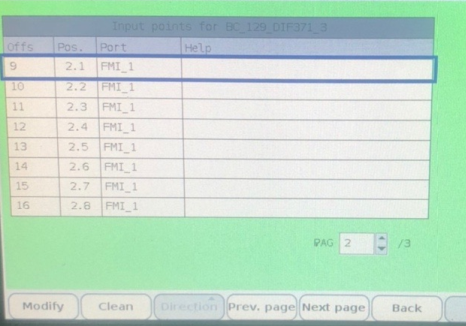
Répétez les étapes 3 à 5 pour configurer les signaux d’entrée. Après la configuration, l’interface s’affiche comme ci-dessous.
-
Retour, et l’image ci-dessous, qui indique que les signaux d’entrée sont configurés avec succès, apparaîtra. Les 8 chiffres de la variable FMI_1 correspondent aux 8 signaux d’entrée sur le dispositif d’E/S.
-
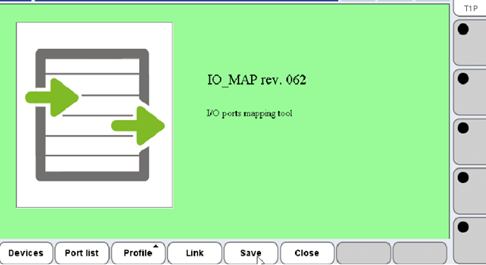
Sélectionnez Enregistrer. À présent, les signaux d’E/S sont configurés. Veuillez redémarrer le robot.
Pour l’instant, les E/S du robot Comau auxquelles Mech-Mind s’est adapté utilisent deux variables de bloc, fmi[1] et fmo[1], contenant chacune 8 signaux.
Charger les fichiers de programme sur le robot
-
Allez à
Communication Component/Robot_Server/Robot_FullControl/comaudepuis le répertoire d’installation de Mech-Vision & Mech-Viz. Copiez tous les fichiers du dossier et collez-les sur votre clé USB. -
Branchez la clé USB au pupitre de commande (teach pendant), puis sélectionnez Fichiers.

-
Sélectionnez . Sélectionnez votre clé USB et trouvez les fichiers à charger.
-
Sélectionnez un fichier, puis sélectionnez .
-
Sélectionnez , puis sélectionnez le dossier UD-USR.
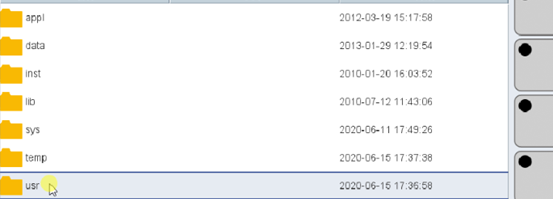
-
Entrez dans le dossier usr, et sélectionnez .
-
Collez les fichiers restants dans le dossier usr.
-
Sélectionnez un fichier PDL dans le dossier usr, puis sélectionnez .
-
Un fichier COD portant le même nom de fichier sera généré après la traduction.
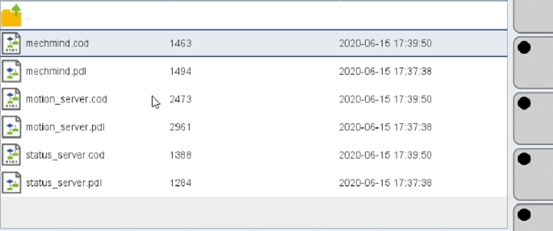
À présent, le chargement est terminé.
Tester la communication Master-Control
Exécuter le programme
-
Appuyez sur
Menu, puis appuyez sur prog sur la page du menu.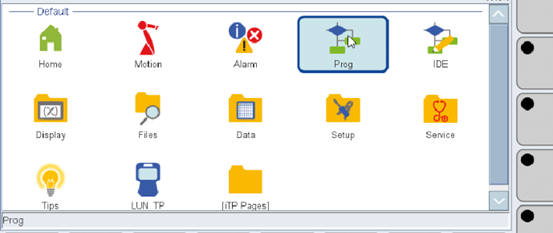
-
Sélectionnez .
-
Sélectionnez un fichier COD et appuyez sur OK.
-
Téléversez les fichiers COD restants.
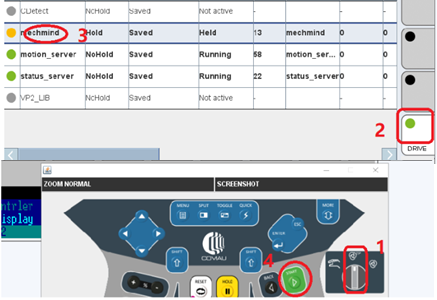
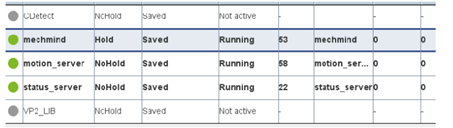
L’état et le numéro de ligne des programmes dans l’image ci-dessus sont normaux. -
Effectuez les étapes de l’image ci-dessous.
-
Ensuite, l’interface mémoire est la suivante. Notez l’état et le numéro de ligne.
Créer un projet Mech-Viz
-
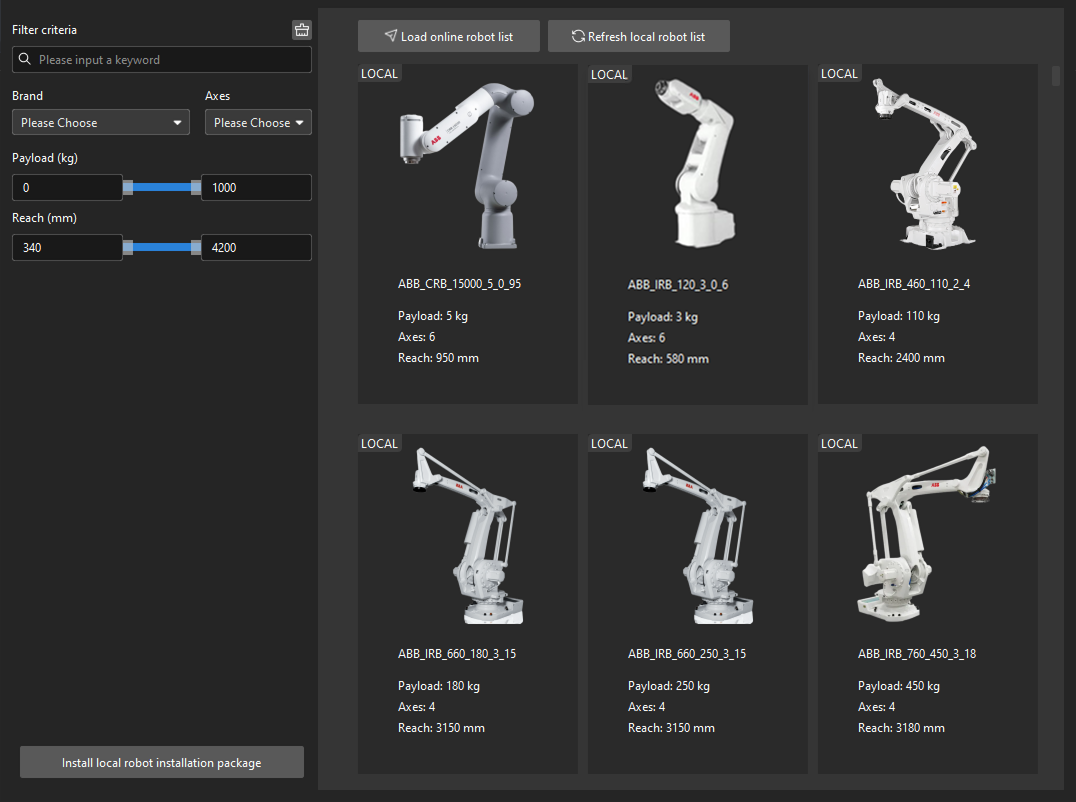
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
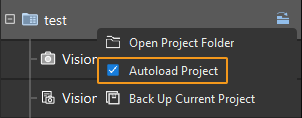
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
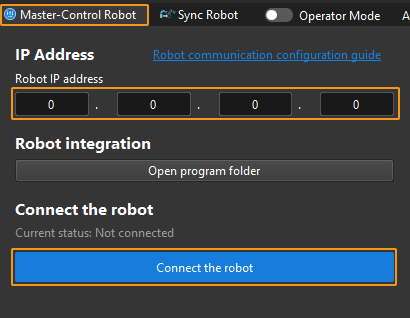
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
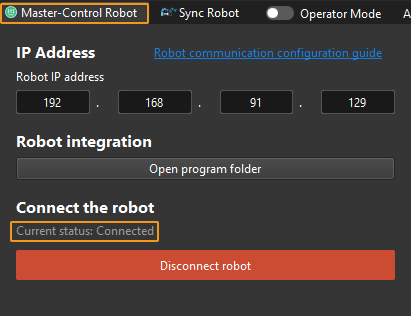
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
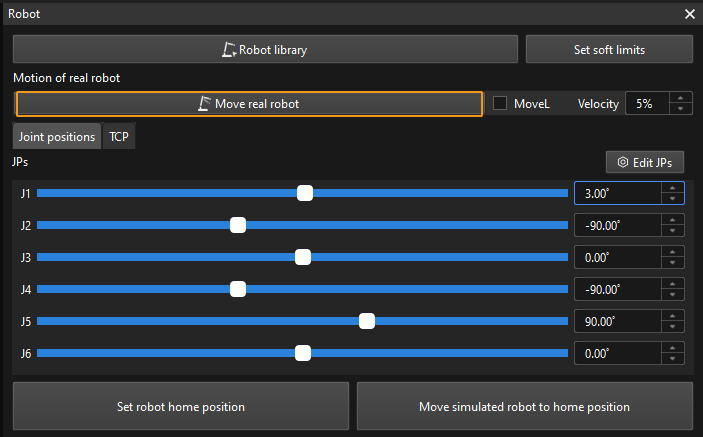
Déplacer le robot
-
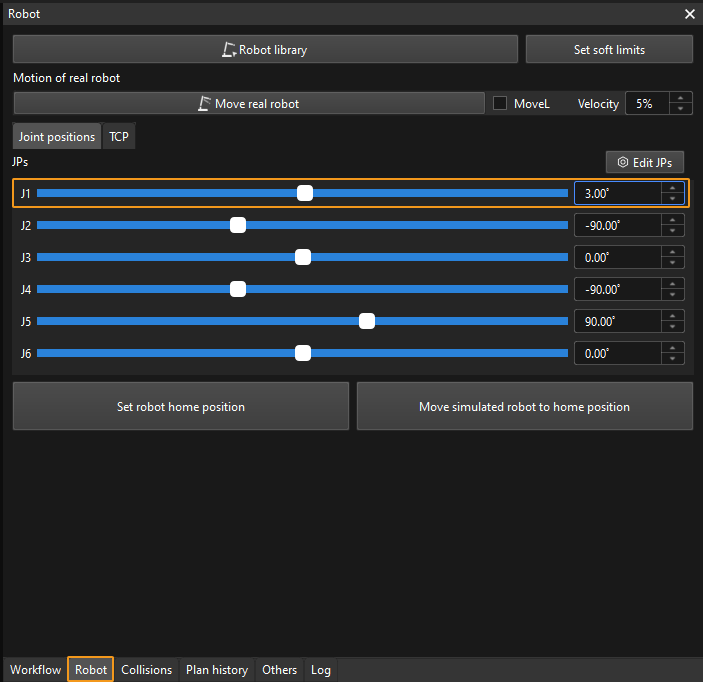
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !