Configuration de la communication Master-Control (SIASUN GCR)
Ce guide vous montre comment configurer la communication Master-Control avec un robot SIASUN GCR.
Vérifier les versions matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Contrôleur : série GCR
-
Version du contrôleur : 2.7.0
Instructions
-
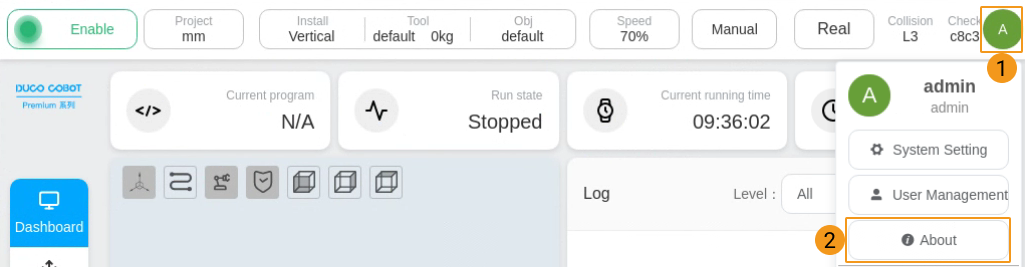
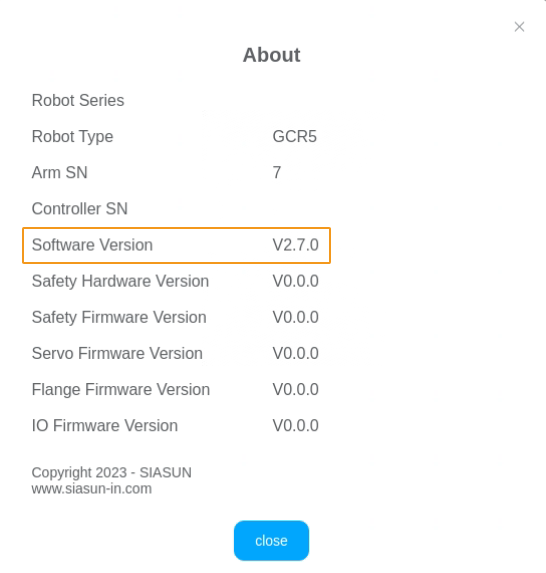
Cliquez sur l’icône de profil dans le coin supérieur droit du boîtier d’enseignement, puis sélectionnez À propos dans le menu déroulant.
-
Vérifiez que la version logicielle est 2.7.0.
-
Configurer la connexion réseau
-
Branchez l’autre extrémité du câble Ethernet de l’IPC sur le port Ethernet du contrôleur du robot.
-
Vérifiez l’adresse IP du robot et assurez-vous qu’elle se trouve sur le même sous-réseau que l’IPC.
Instructions
-
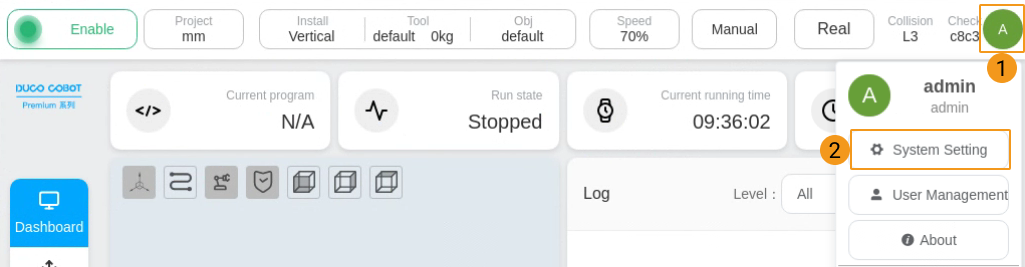
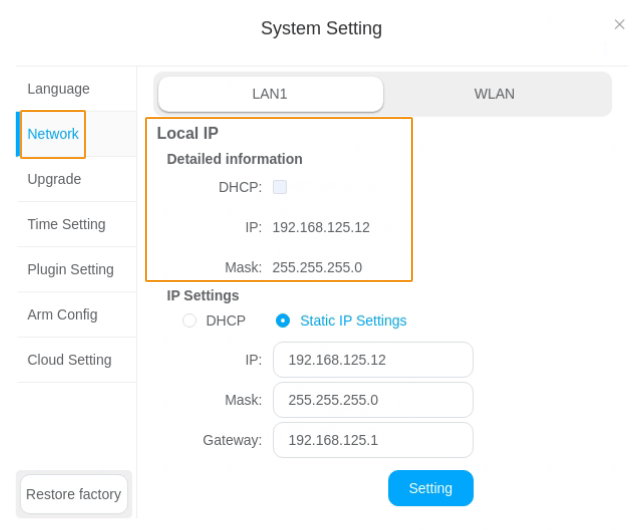
Cliquez sur l’icône de profil utilisateur dans le coin supérieur droit du boîtier d’enseignement. Cliquez sur Paramètres système dans le menu déroulant.
-
Dans la fenêtre Paramètres système, cliquez sur Réseau. Vérifiez l’adresse IP du robot et le masque de sous-réseau dans la zone IP locale.
-
-
Si l’adresse IP du robot et celle de l’IPC se trouvent sur des sous-réseaux différents, modifiez l’adresse IP de l’IPC.
Tester la communication maître-contrôle
Créer un projet Mech-Viz
-
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
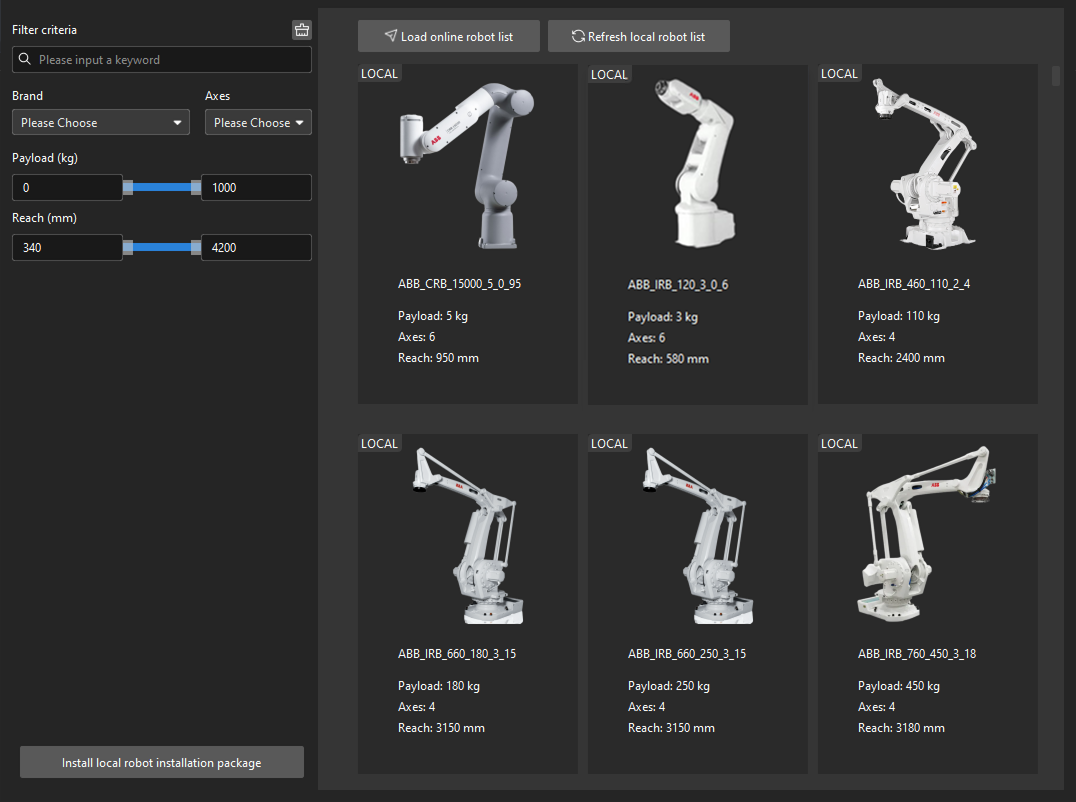
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
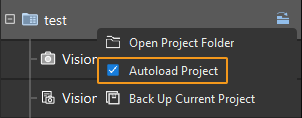
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
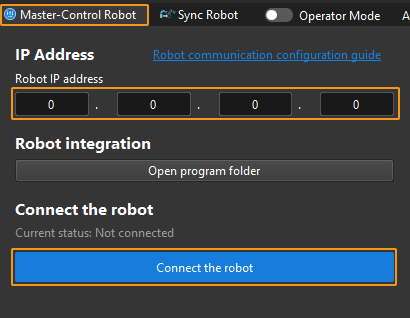
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
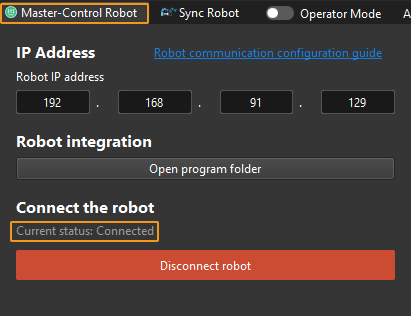
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
Déplacer le robot
-
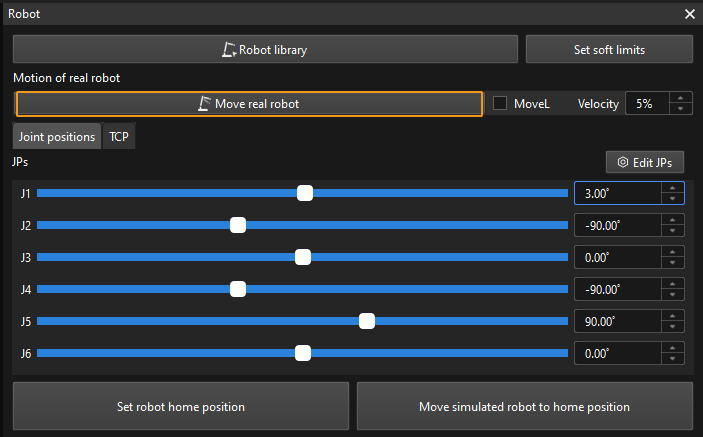
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
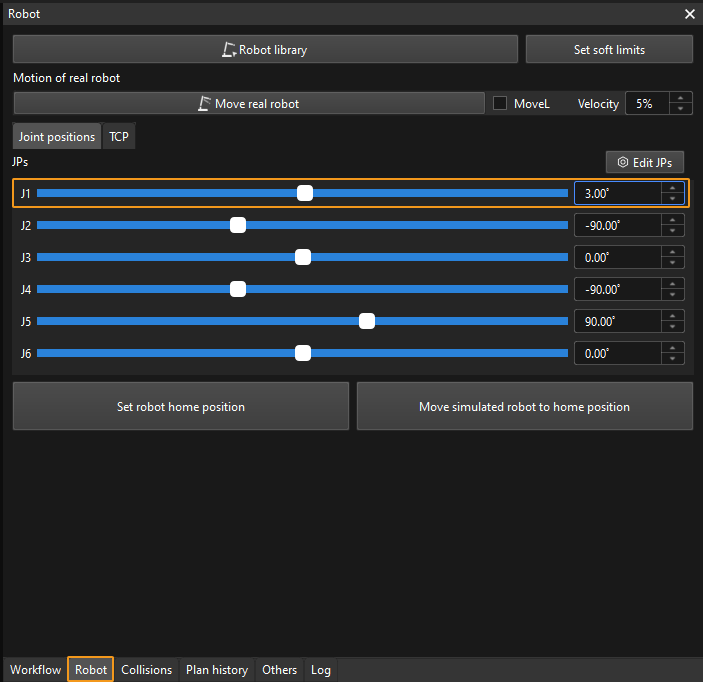
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !