KUKA Étalonnage automatique
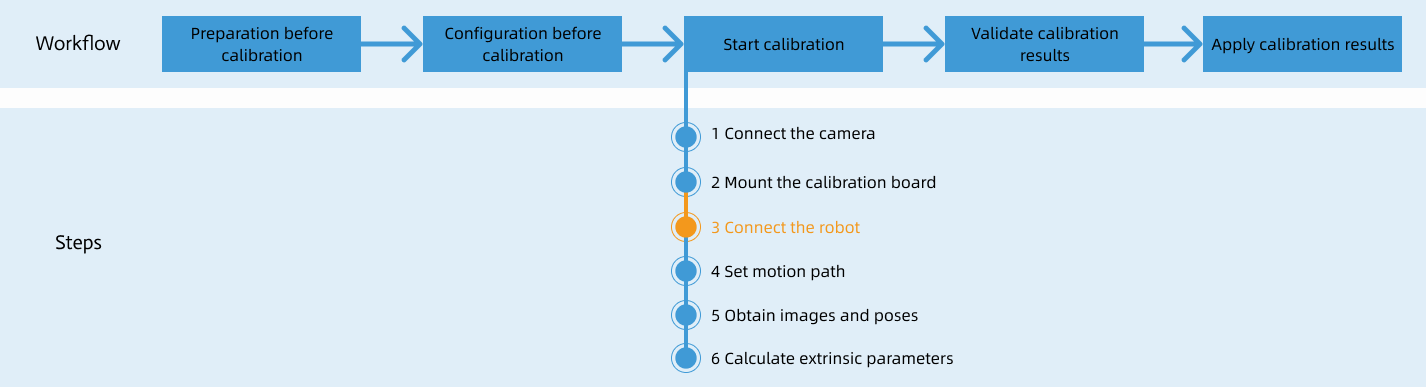
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner le programme d’étalonnage
-
Basculez en mode Administrateur en suivant les instructions de passage en mode Expert.
-
Sur le pupitre de programmation, ouvrez le dossier
KRC:\R1\mm, sélectionnez mm_module.src, puis appuyez sur Sélectionner.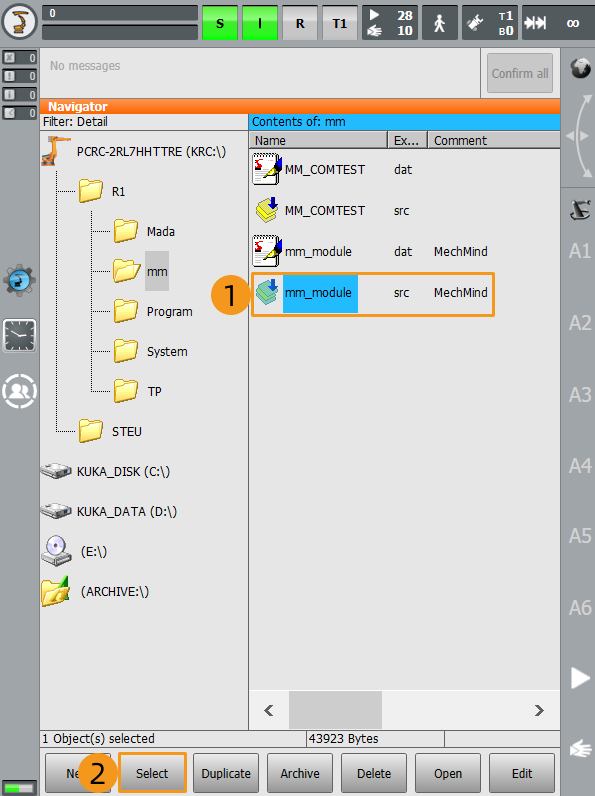
2. Enseigner le point de départ de l’étalonnage
-
Déplacez le robot vers le point de départ pour l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
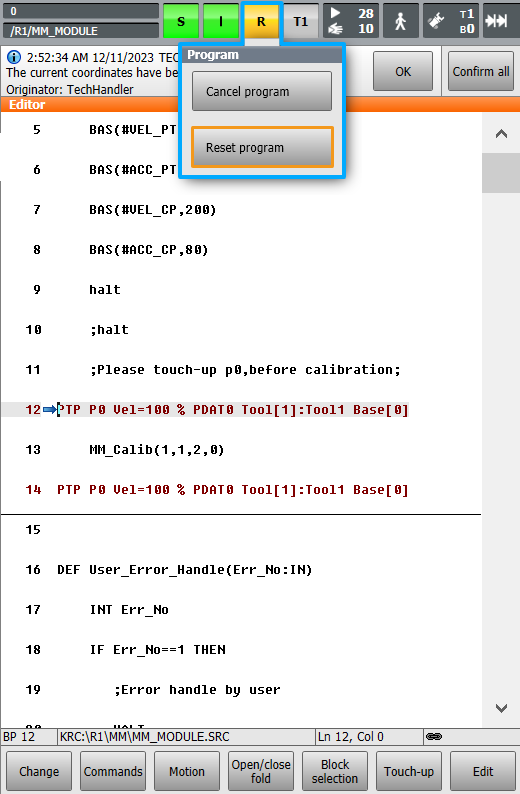
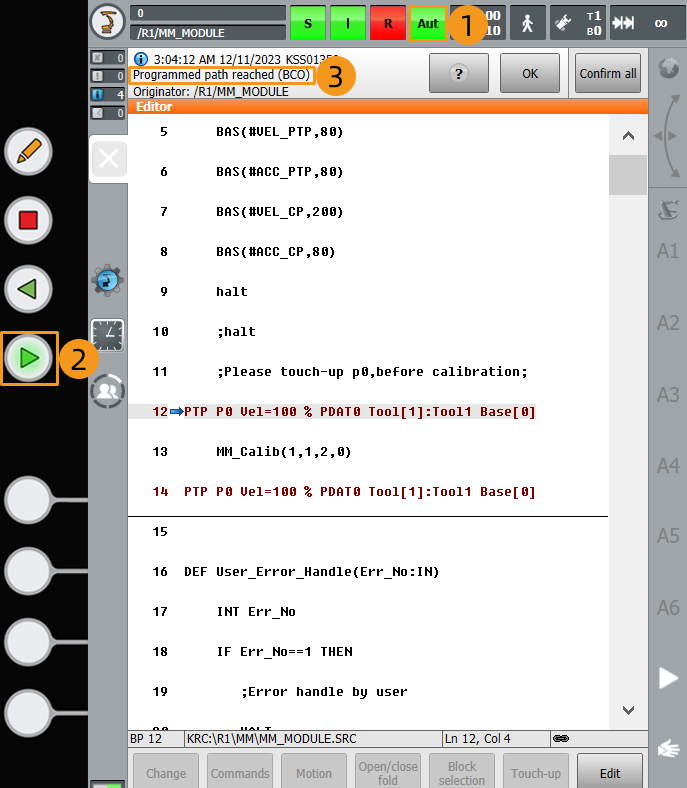
Sélectionnez la ligne contenant “PTP P0 Vel=100 % PDAT0 Tool[1]:Tool1 Base[0]” et placez le curseur sur cette ligne. Sélectionnez Sélection de bloc. Lorsque le curseur apparaît devant la ligne, sélectionnez Mise à jour.
Si le bouton Mise à jour ne fonctionne pas et qu’une erreur se produit, essayez de supprimer la commande de mouvement actuelle, puis recréez la commande de mouvement. 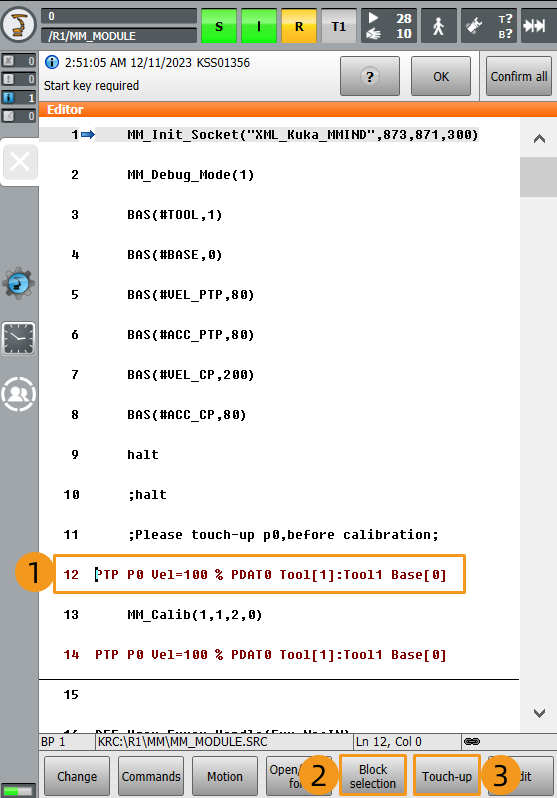
-
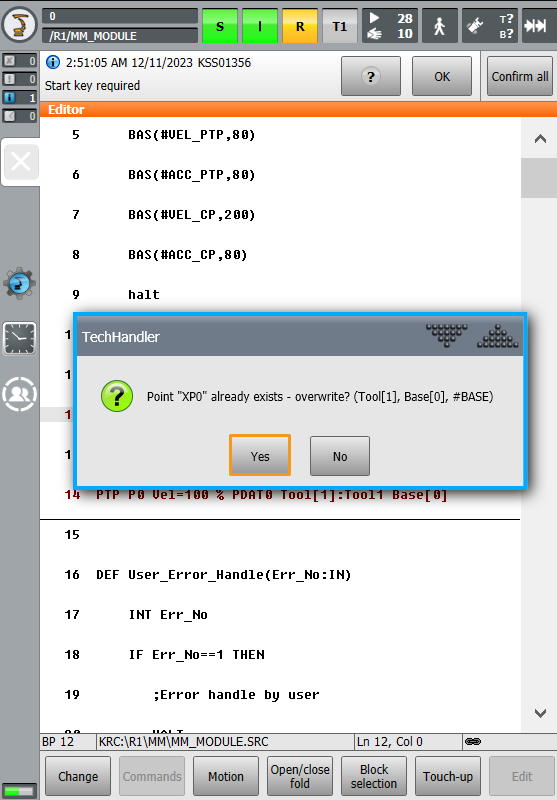
Appuyez sur Oui dans la fenêtre contextuelle pour terminer l’enseignement du point de départ de l’étalonnage.
3. Exécuter le programme d’étalonnage
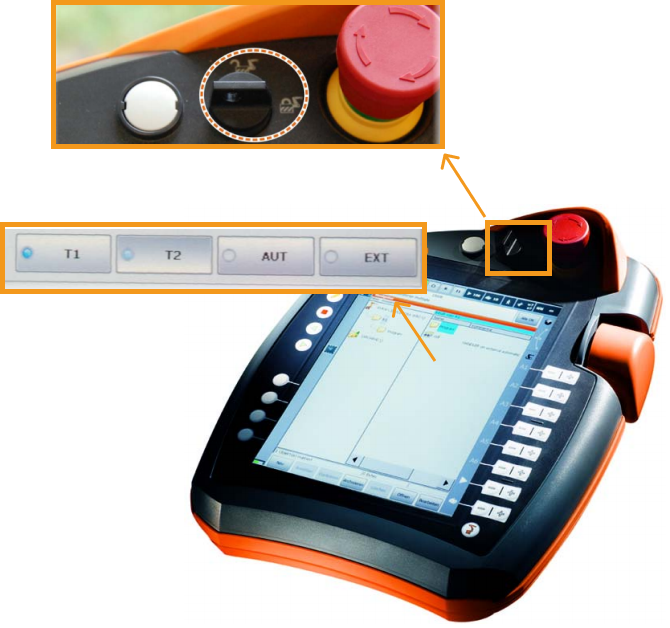
Avant de commencer, nous vous recommandons de consulter les instructions suivantes pour apprendre à basculer entre les modes d’exécution.
Tournez l’interrupteur à clé en position horizontale. Sélectionnez le mode d’exécution, par exemple, T1 ou AUT, dans la boîte de dialogue contextuelle à l’écran. Puis, remettez l’interrupteur en position verticale.
| T1 correspond au mode Manuel à vitesse réduite, et AUT correspond au mode Automatique. |
-
Basculez en mode T1 en suivant les instructions ci‑dessus.
-
Sélectionnez R sur le pupitre de programmation. Sélectionnez Réinitialiser le programme dans la fenêtre contextuelle.
-
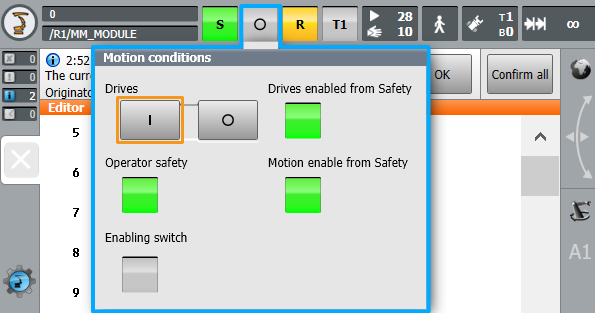
Sélectionnez O. Ensuite, sélectionnez I dans la fenêtre contextuelle pour passer l’état des Entraînements à I. Ignorez cette étape si l’état de Entraînements est I dès le départ.
-
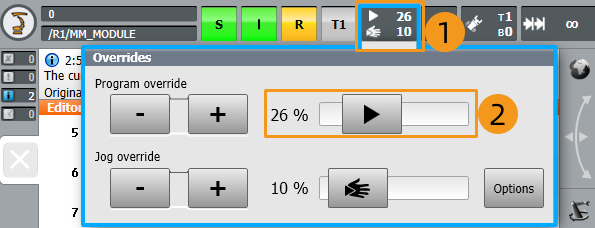
Ajustez la valeur de l'Override du programme à une vitesse appropriée. Observez le mouvement du robot lorsque le programme s’exécute.
-
Basculez en mode AUT en suivant les instructions ci‑dessus.
-
Appuyez et maintenez le bouton vert d’exécution à l’avant du pupitre de programmation jusqu’à ce que la flèche se déplace vers la ligne “PTP P0 Vel=100 % PDAT0 Tool[1]:Tool1 Base[0]”, qui correspond au point de départ de l’étalonnage. Le message « Trajectoire programmée atteinte (BCO) » s’affichera en haut de l’écran.
-
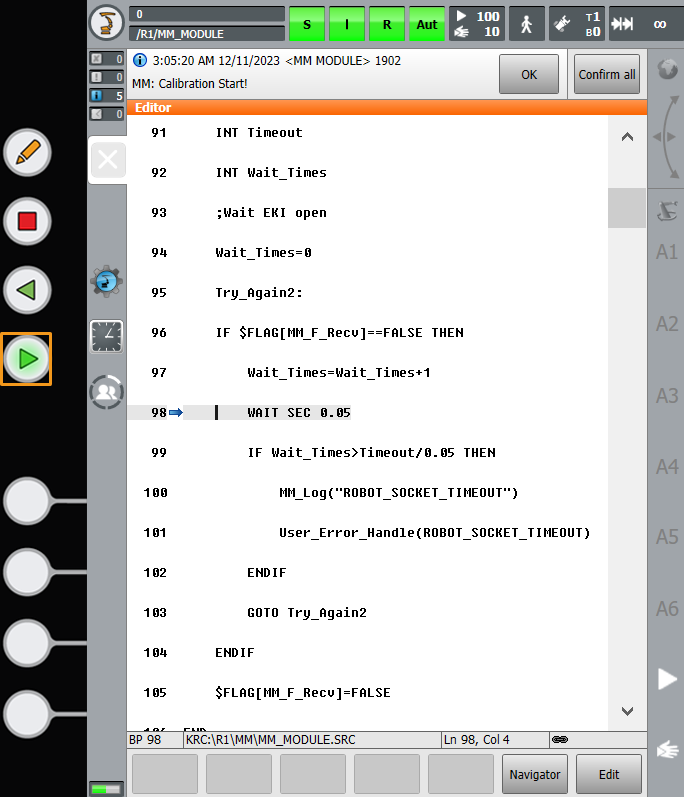
Ensuite, appuyez sur le bouton d’exécution pour continuer à exécuter le programme. (Le bouton R devient vert lorsque le programme est en cours d’exécution.)
-
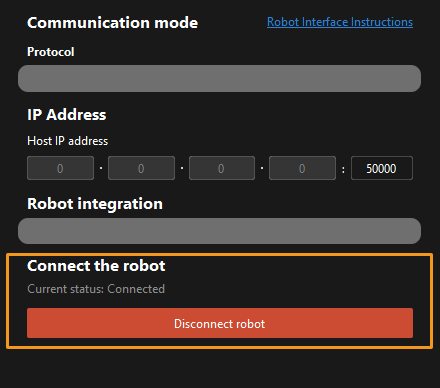
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-