Configuration de la communication Master-Control
Ce guide vous montre comment configurer la communication Master-Control avec un robot YASKAWA.
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Confirmez que le robot est un robot YASKAWA à 6 axes.
-
Confirmez que le modèle du contrôleur du robot et la version du système répondent aux exigences ci-dessous.
Modèle de contrôleur Version du système DX200
DN3.16.00A-00
YRC1000
YAS2.94.00-00
YRC1000micro
YBS2.31.00-00
Dans ce guide, le robot YRC1000 (YAS2.94.00-00) est utilisé. -
Confirmez que l’option Ethernet a été activée pour le robot YASKAWA.
Cliquez ici pour afficher les instructions
-
Maintenez la touche MENU PRINCIPAL enfoncée sur la commande manuelle, et mettez le robot sous tension pour entrer en mode maintenance.
Si le robot est déjà démarré, redémarrez-le en maintenant la touche MENU PRINCIPAL enfoncée sur la commande manuelle. 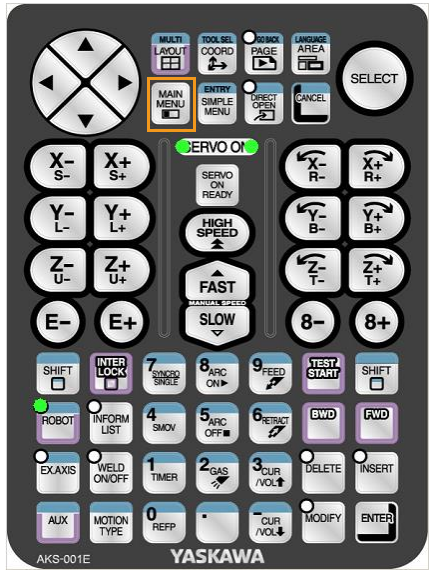
-
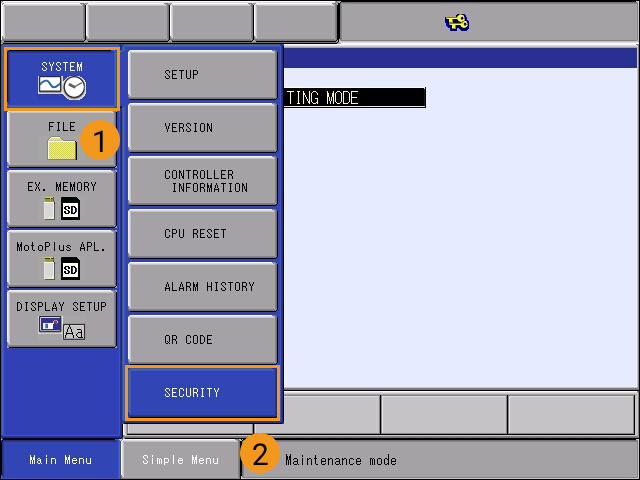
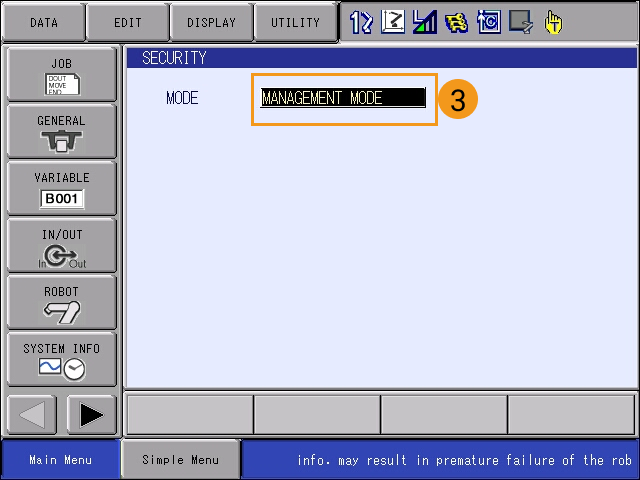
En mode maintenance, sélectionnez .

-
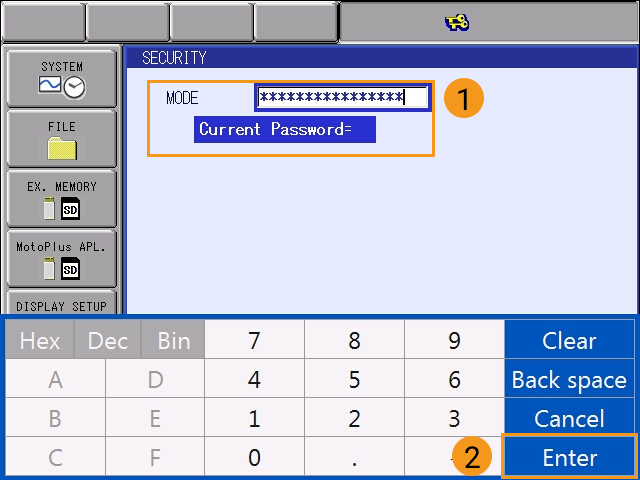
Saisissez le mot de passe (qui est par défaut seize fois le chiffre 9), puis sélectionnez Entrée pour accéder au MODE DE GESTION.
-
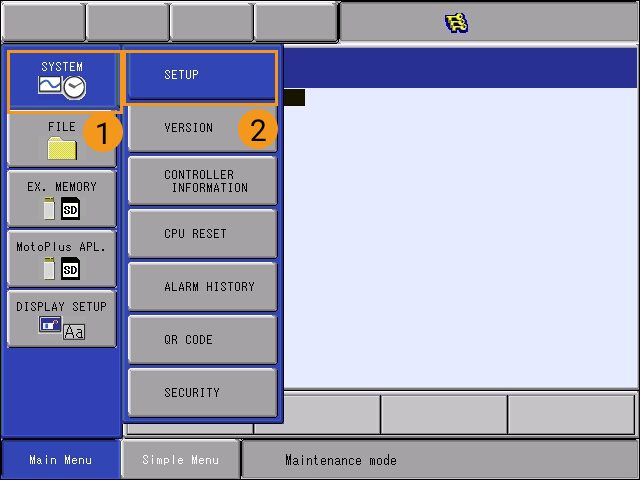
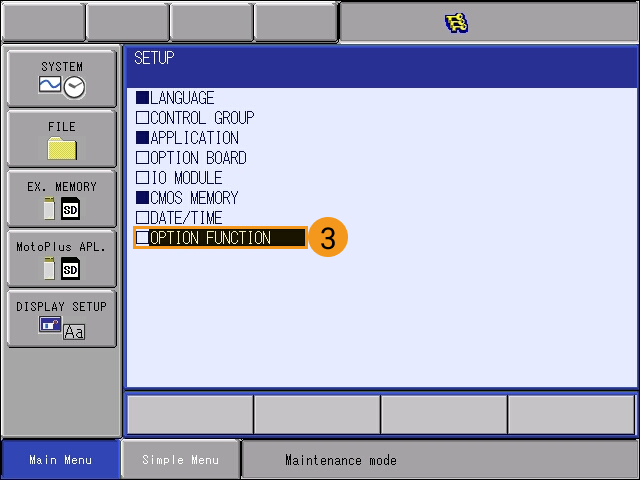
Dans le Menu principal, sélectionnez .
-
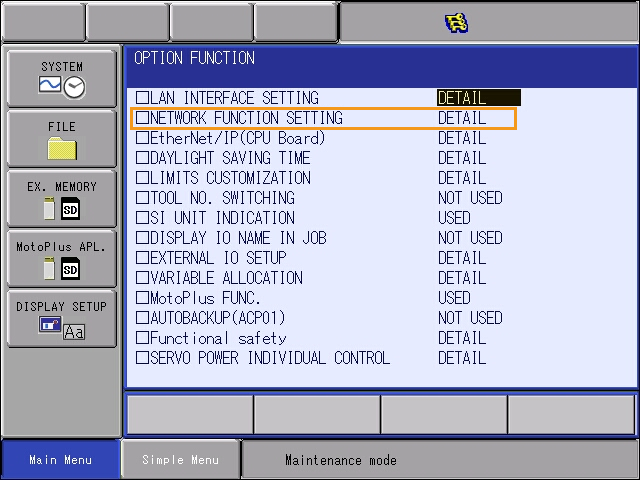
Sur l’interface FONCTION OPTIONNELLE, sélectionnez DÉTAIL de PARAMÈTRES DE FONCTION RÉSEAU, puis appuyez sur Sélectionner sur la commande manuelle pour accéder à l’interface PARAMÈTRES DE FONCTION RÉSEAU.
-
Vérifiez si l’état de ETHERNET est affiché comme UTILISÉ.
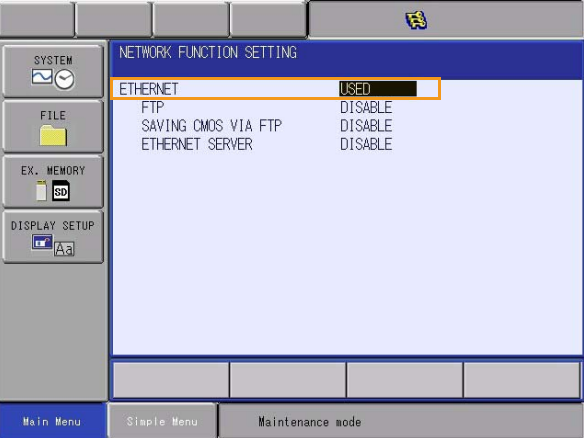
Si l’état est NON UTILISÉ, veuillez contacter le fabricant du robot pour obtenir de l’aide.
-
-
Confirmez que l’option MotoPlus a été activée pour le robot YASKAWA.
Cliquez ici pour afficher les instructions
-
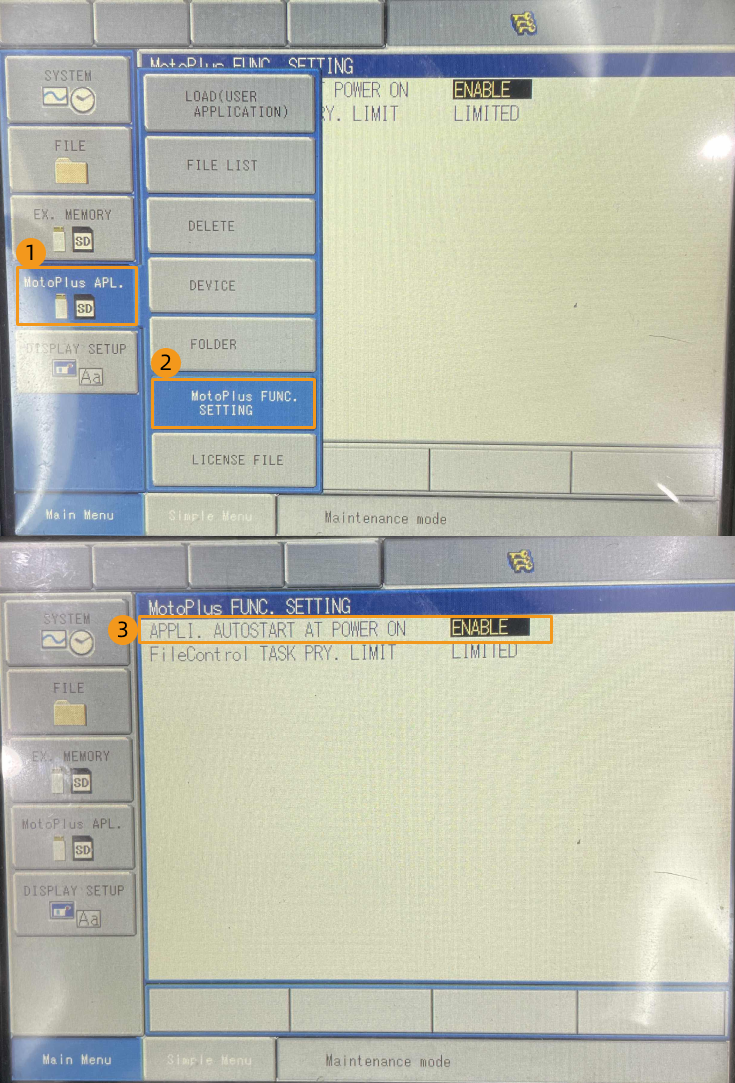
Dans le MODE DE GESTION du mode maintenance, sélectionnez dans le Menu principal.
-
Sur l’interface RÉGLAGE DES FONCTIONS MotoPlus, vérifiez si l’état de AUTODÉMARRAGE APPLI. À LA MISE SOUS TENSION est ACTIVÉ.
-
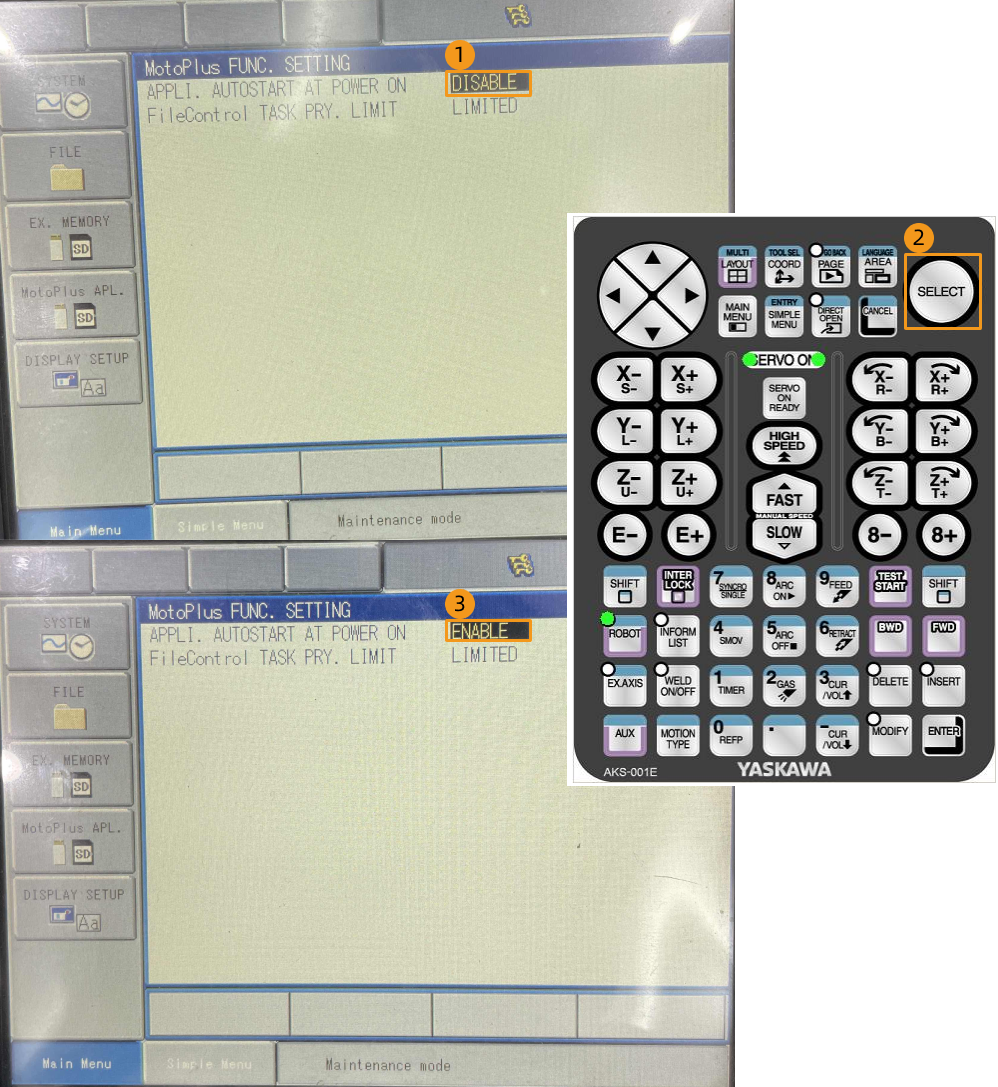
Si l’état est « DÉSACTIVÉ », sélectionnez DÉSACTIVÉ, puis appuyez sur la touche Sélectionner sur la commande manuelle pour basculer l’état sur « ACTIVÉ ».
-
|
Si les conditions ci-dessus ne peuvent pas être satisfaites, le système de vision ne pourra pas communiquer avec le robot via l’Interface standard. Veuillez contacter le fabricant du robot pour obtenir de l’aide. |
Configurer la connexion réseau
Connecter le matériel
Si vous utilisez le contrôleur YRC1000, branchez le câble Ethernet de l’IPC sur le port LAN2 (CN106) de la carte CPU du contrôleur du robot. Si vous utilisez le contrôleur DX200, branchez le câble Ethernet de l’IPC sur le port CN104 de la carte CPU du contrôleur du robot.
|
Pour le contrôleur YRC1000:
|
Définir l’adresse IP
-
Maintenez la touche MENU PRINCIPAL enfoncée et mettez le robot sous tension pour entrer en mode maintenance.
Le système entre en mode de démarrage normal si vous n’appuyez pas sur la touche MENU PRINCIPAL. -
Sélectionnez MODE DE GESTION.
-
Saisissez le mot de passe (le mot de passe par défaut est seize fois le chiffre 9), puis cliquez sur Entrée pour accéder à MODE DE GESTION.
-
Sélectionnez . Sur l’interface OPTION FUNCTION, cliquez sur PARAMÉTRAGE DE L’INTERFACE LAN.

-
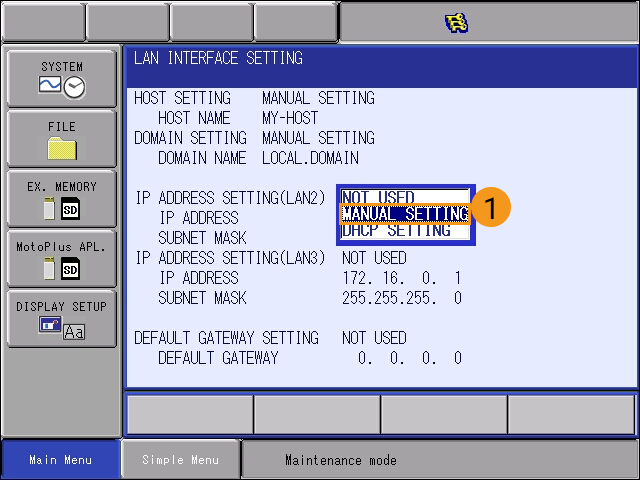
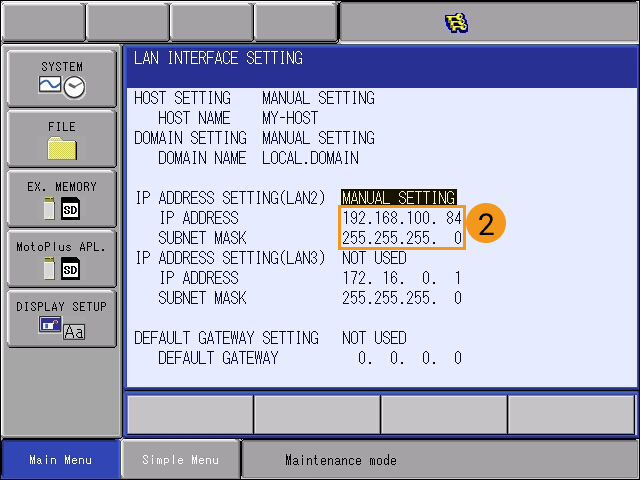
Dans le menu déroulant de PARAMÈTRAGE DE L’ADRESSE IP (LAN2), sélectionnez RÉGLAGE MANUEL, et définissez une ADRESSE IP et un MASQUE DE SOUS-RÉSEAU appropriés.
-
L’adresse IP de LAN2 doit appartenir au même sous-réseau que l’IPC.
-
Le masque de sous-réseau doit être 255.255.255.0.
-
-
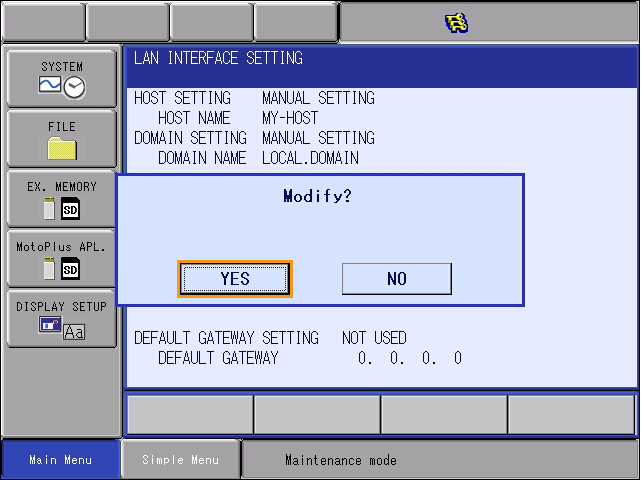
Appuyez sur la touche Entrée sur la commande manuelle, puis cliquez sur OUI dans le message contextuel.
Charger les fichiers de programme sur le robot
Préparer les fichiers de programme
-
Accédez à
Communication Component/Robot_Server/Robot_FullControl/yaskawadepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez le fichier de programme (yrc1000.out) et collez-le à la racine de votre clé USB.-
Le système de fichiers de la clé USB doit être FAT32.
-
Si vous utilisez un contrôleur DX200, copiez le fichier dx200.out.
-
-
Branchez la clé USB contenant le fichier de programme dans le port USB à l’arrière de la commande manuelle.
Copiez le fichier de programme adapté au contrôleur utilisé.
Charger les fichiers sur le robot
-
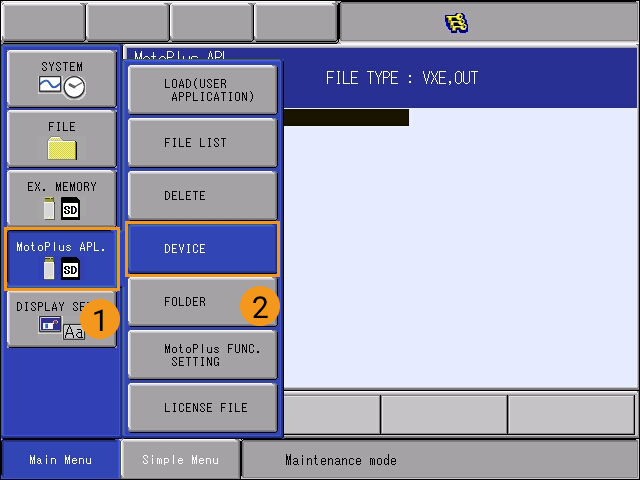
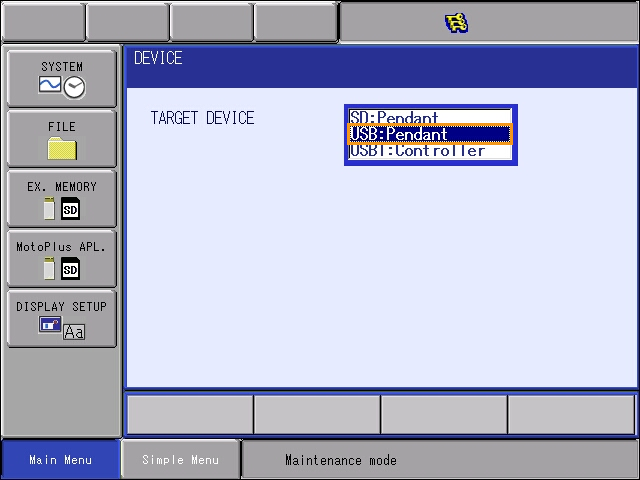
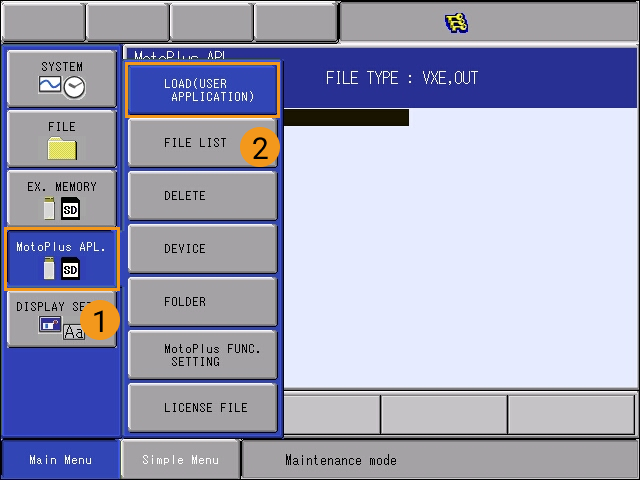
En mode maintenance, sélectionnez .
-
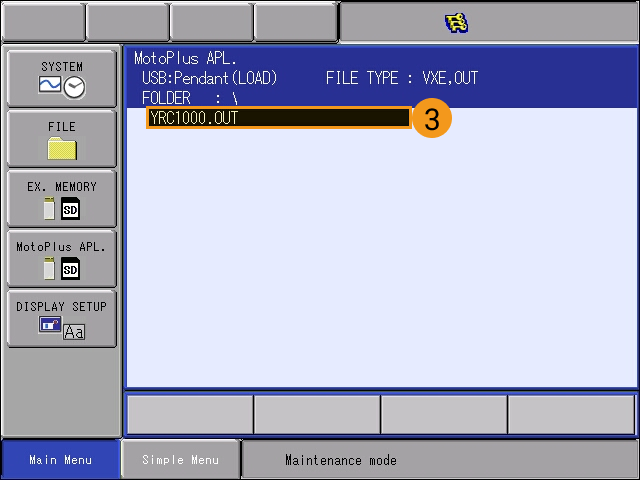
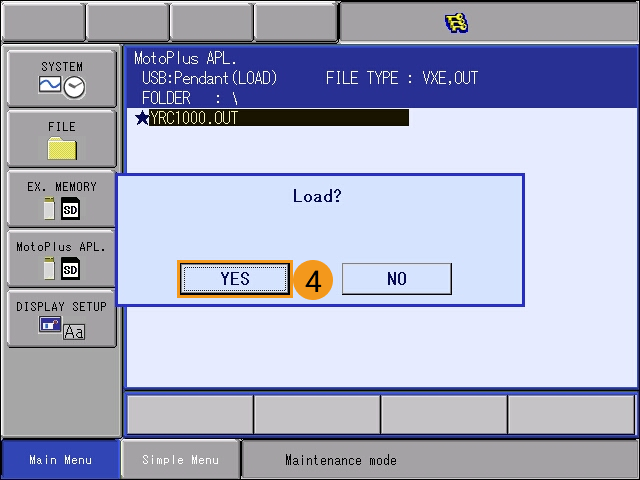
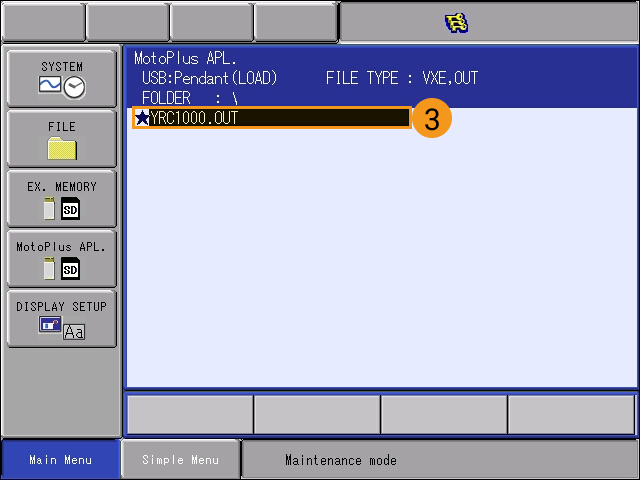
Sélectionnez . Sélectionnez le fichier OUT, appuyez sur la touche Entrée, et cliquez sur OUI dans la fenêtre pop-up pour démarrer le chargement du programme.
-
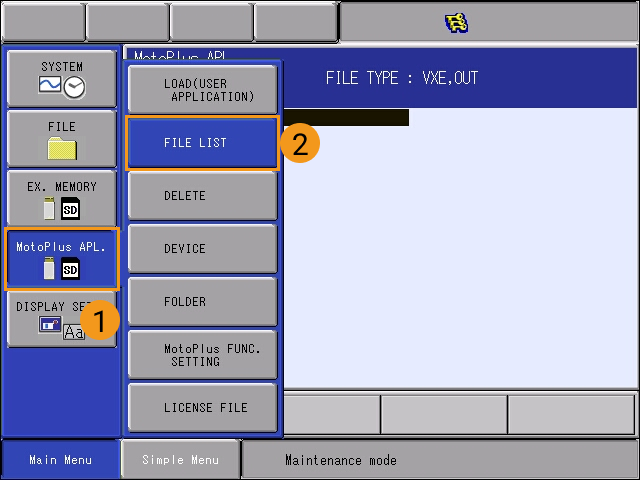
Après l’installation, sélectionnez . Vous pouvez voir le fichier installé ici.
-
Redémarrez le contrôleur (sans appuyer sur la touche MENU PRINCIPAL) pour entrer en mode normal afin que le fichier YRC1000.out puisse s’exécuter automatiquement en arrière-plan. Tournez la clé complètement vers la gauche, et Mech-Viz sera connecté au robot.

Au démarrage, le robot fonctionnera à la vitesse par défaut (100 %), une vitesse relativement élevée. Pour garantir la sécurité, veuillez modifier la vitesse avant de déclencher le projet Mech-Viz.
-
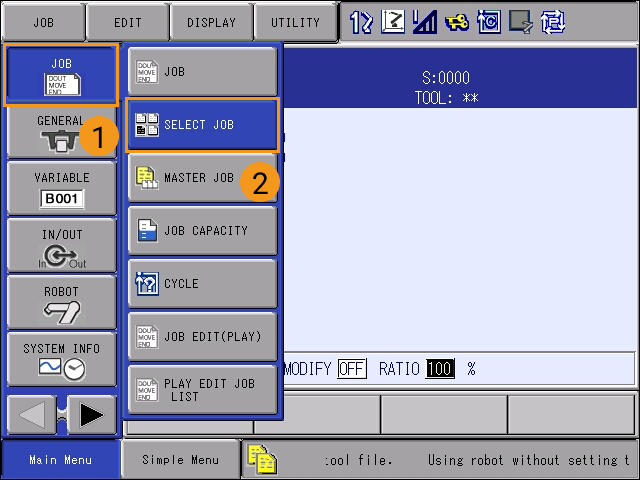
Cliquez sur .
-
Sélectionnez n’importe quel job vide dans la liste des jobs (ou un job qui contient le point de départ), puis appuyez sur le bouton Sélectionner sur la commande manuelle. L’interface suivante apparaîtra.

-
Sélectionnez , puis sélectionnez la barre RÉGLAGE DE LA VITESSE.
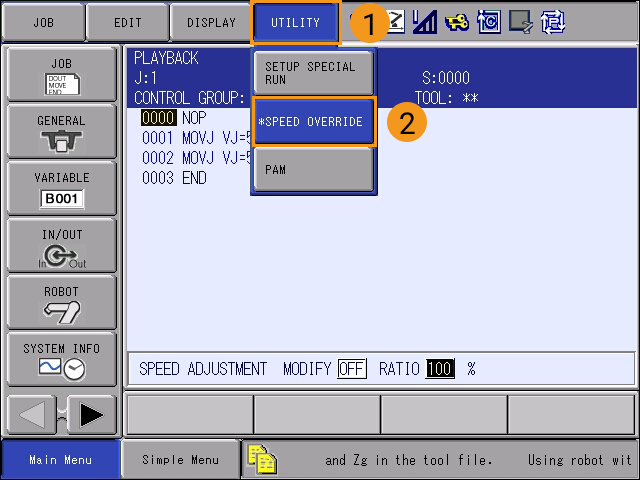

Vous ne pouvez pas modifier les paramètres si la barre RÉGLAGE DE LA VITESSE n’est pas sélectionnée. -
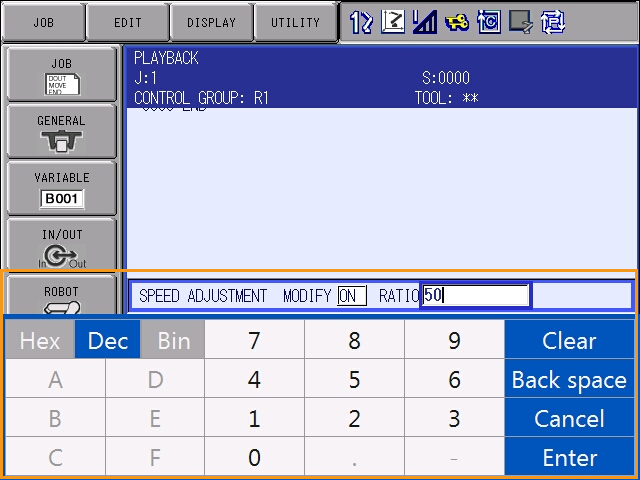
Appuyez sur RÉGLAGE DE LA VITESSE puis sur Arrêt. Appuyez sur la touche Sélectionner de la commande manuelle pour basculer Modifier sur Marche.

Vous ne pouvez pas ajuster la vitesse si Modifier n’est pas basculé sur Marche. -
De même, appuyez sur le nombre après RATIO, puis appuyez sur la touche Sélectionner pour modifier le rapport de vitesse. Appuyez sur la touche Entrée pour enregistrer la modification.
-
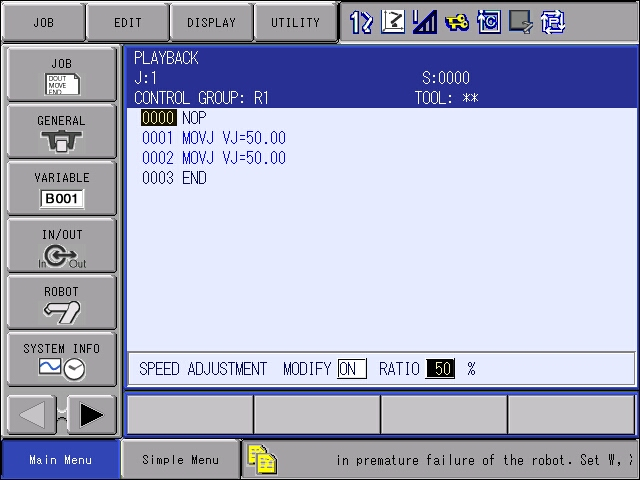
L’interface après l’ajustement de la vitesse est la suivante.
Tester la communication maître-contrôle
Créer un projet Mech-Viz
-
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
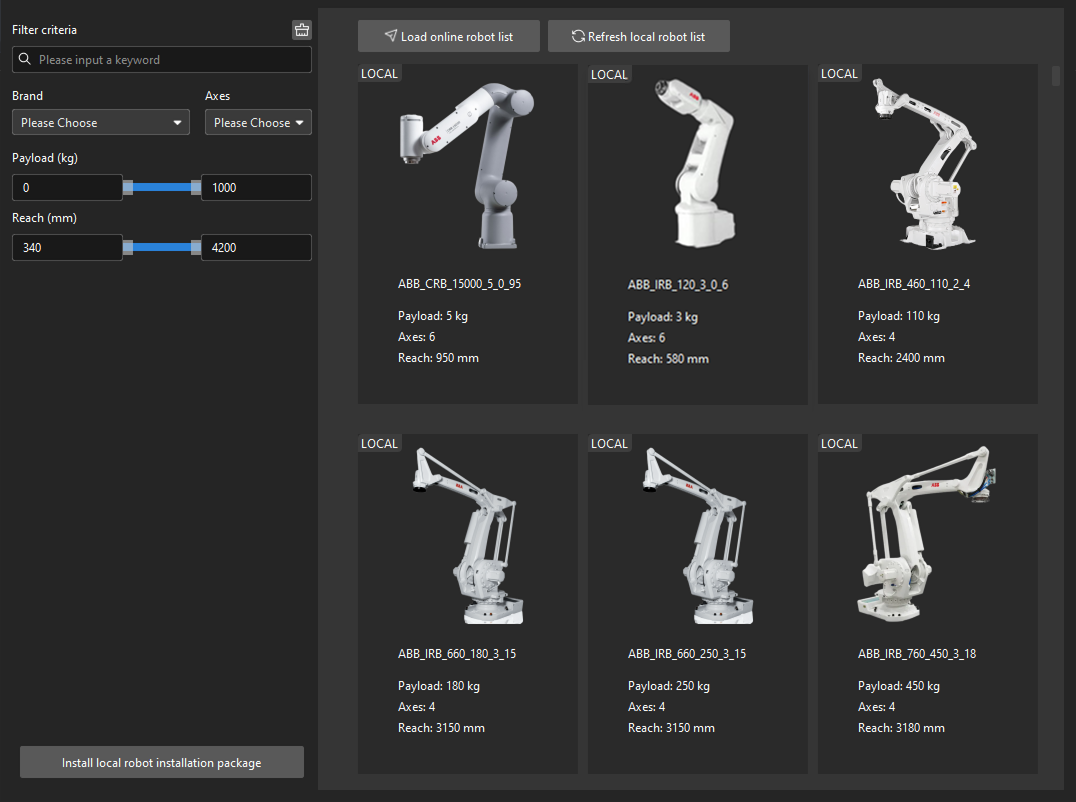
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
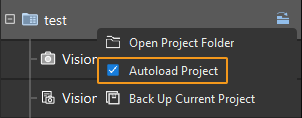
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
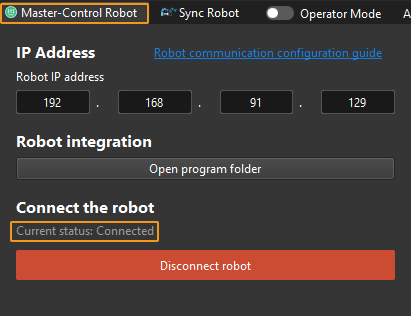
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
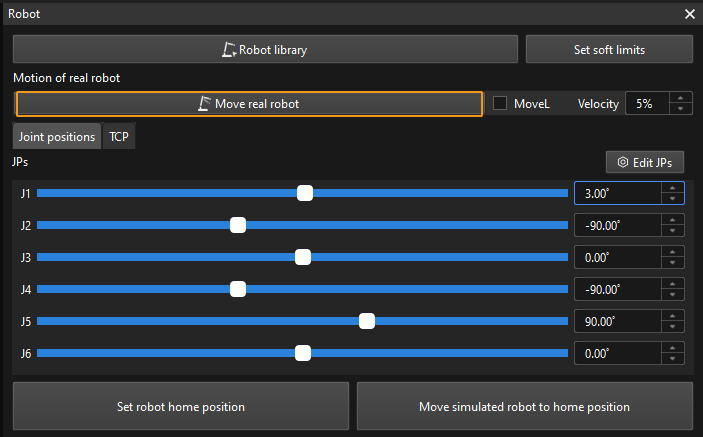
Déplacer le robot
-
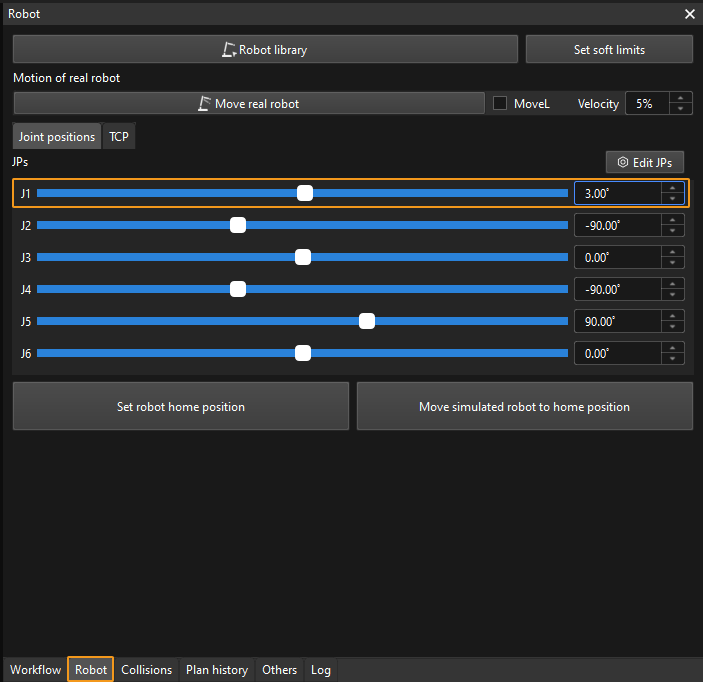
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !