Configuration de la communication Master-Control
Ce guide vous montre comment configurer la communication Master-Control avec un robot AE Peitian.
Préparation
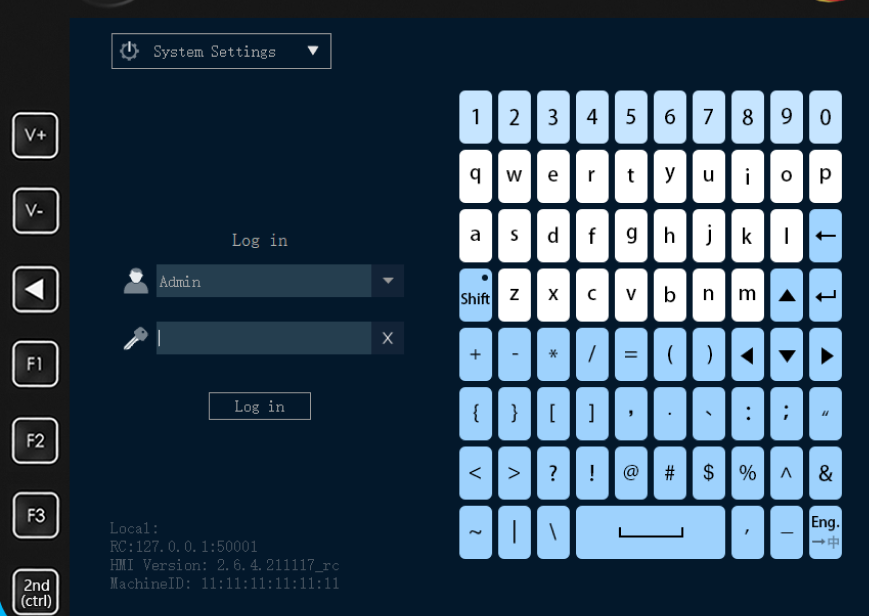
Connexion
Chaque fois que vous ouvrez le pupitre d’enseignement, vous devez vous connecter avec un compte. Les mots de passe initiaux sont indiqués ci-dessous.
| Compte | Mot de passe |
|---|---|
Enseignant |
PEACE |
OEM |
GRACE |
Administrateur |
OMNIPOTENT |
Charger les fichiers du programme sur le robot
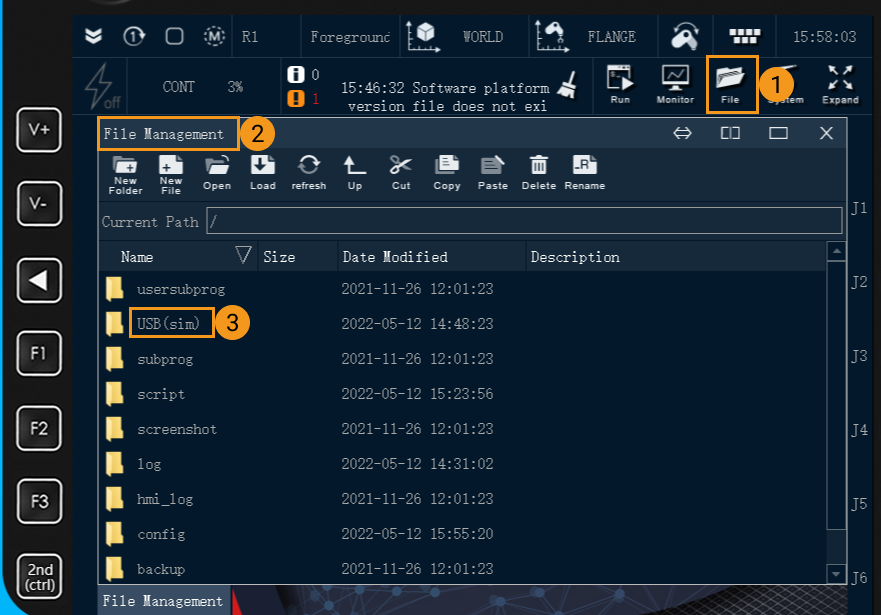
Accédez à Communication Component/Robot_Server/Robot_FullControl/ae depuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez le fichier de programme task_main.arl et collez-le dans le dossier /script du système du robot via une clé USB. De plus, le fonctionnement du pupitre d’enseignement du robot AE est similaire à celui du système d’exploitation Windows.
-
Aller à , sélectionnez USB(sim) dans la liste, et ouvrez le dossier.
-
Sélectionnez le fichier
task_main.arl, puis sélectionnez Copier, et ensuite sélectionnez Remonter pour accéder au répertoire parent.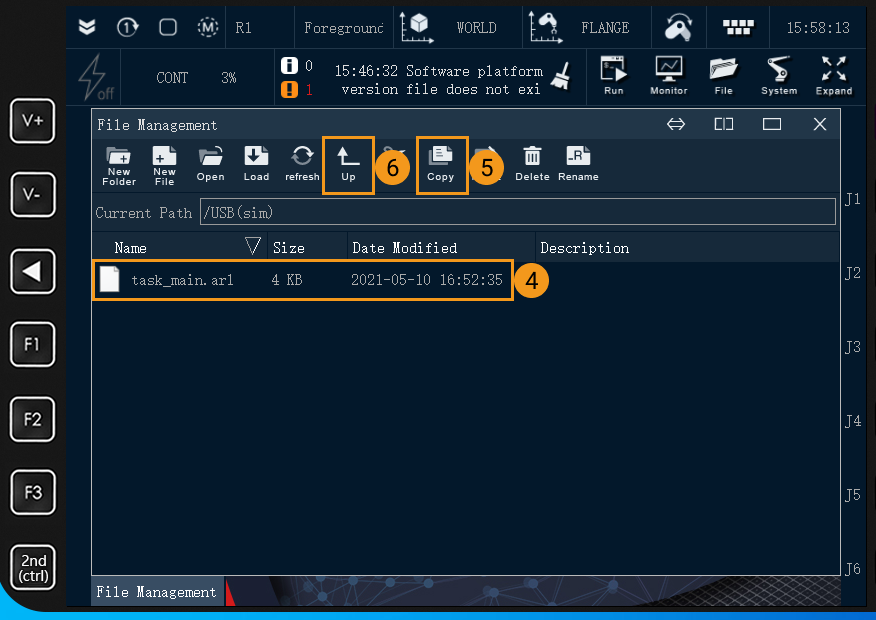
-
Après avoir ouvert le dossier
/script, sélectionnez Coller pour y déplacer le fichiertask_main.arl.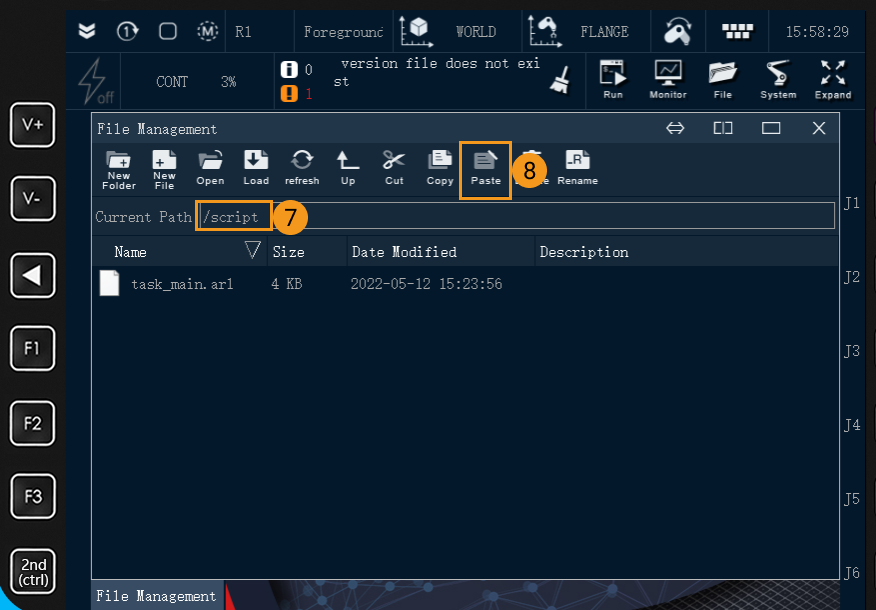
Tester la communication Master-Control
Exécuter le programme
-
Double-cliquez sur
task_main.arlpour ouvrir le fichier du programme, puis sélectionnez Charger.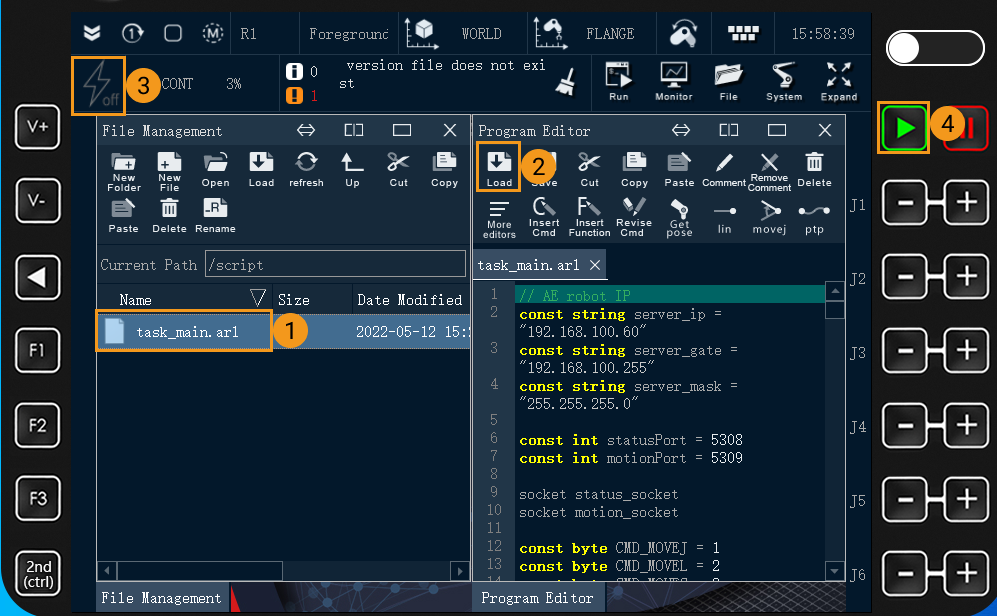
-
Appuyez sur Alimentation, puis appuyez sur
exécuterpour lancer le programme.
Créer un projet Mech-Viz
-
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
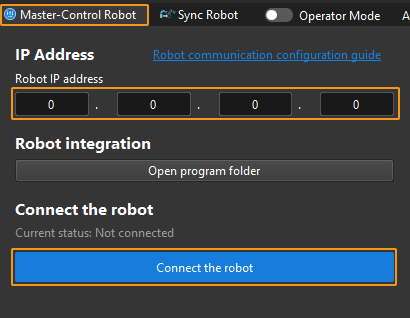
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
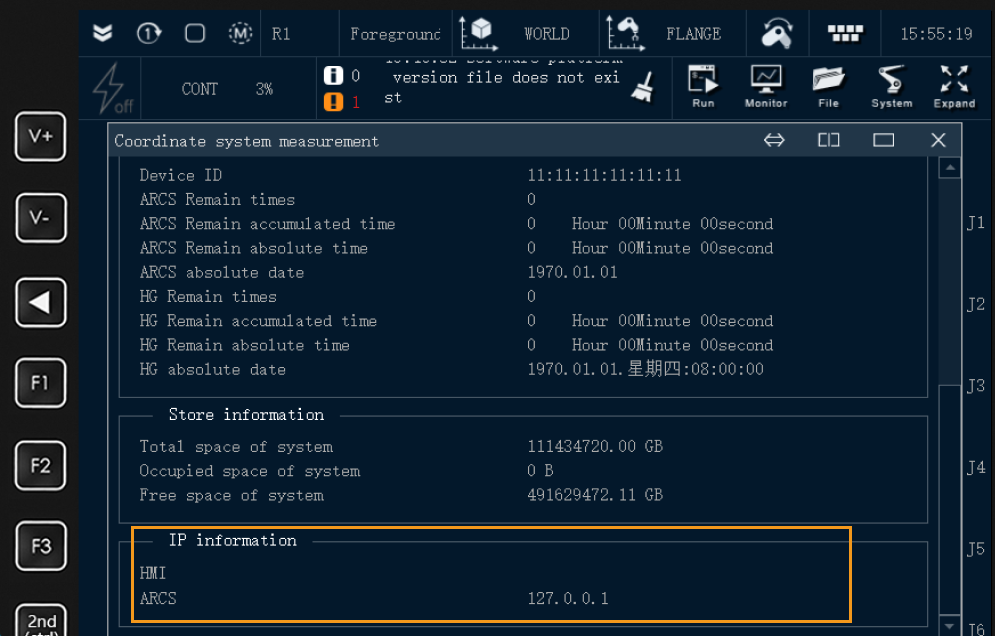
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
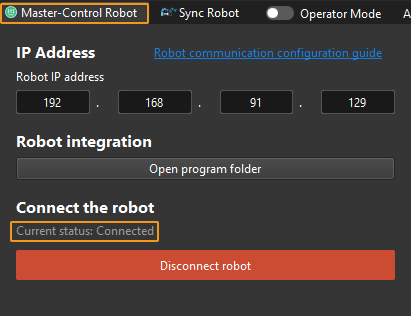
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
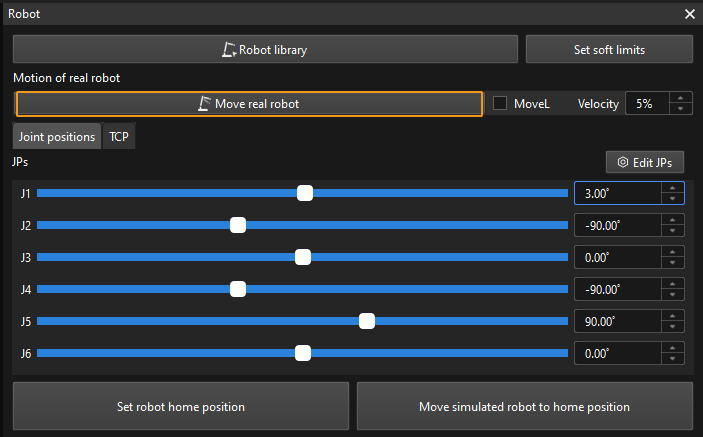
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
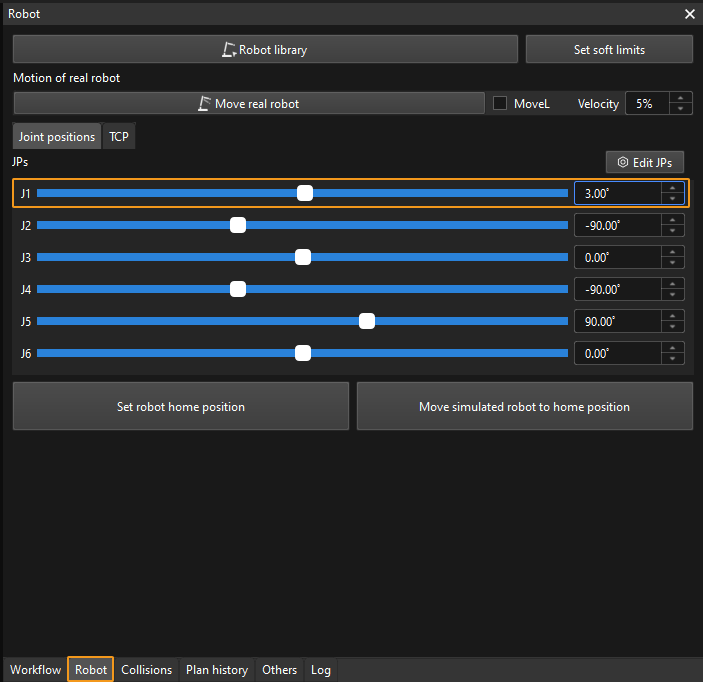
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !