Programme d’exemple 4: MM_S4_Vis_SwitchRecipe
Introduction du programme
Description |
L’API déclenche Mech-Vision pour changer la recette de paramètres, déclenche l’exécution du projet Mech-Vision, puis obtient le résultat de vision. |
File path |
Vous pouvez trouver le fichier du programme en utilisant le chemin |
Project |
Projet Mech-Vision (La recette de paramètres doit être configurée au préalable.) |
Prerequisites |
|
| Ce programme d’exemple est fourni uniquement à titre de référence. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette partie décrit le programme d’exemple MM_S4_Vis_SwitchRecipe.
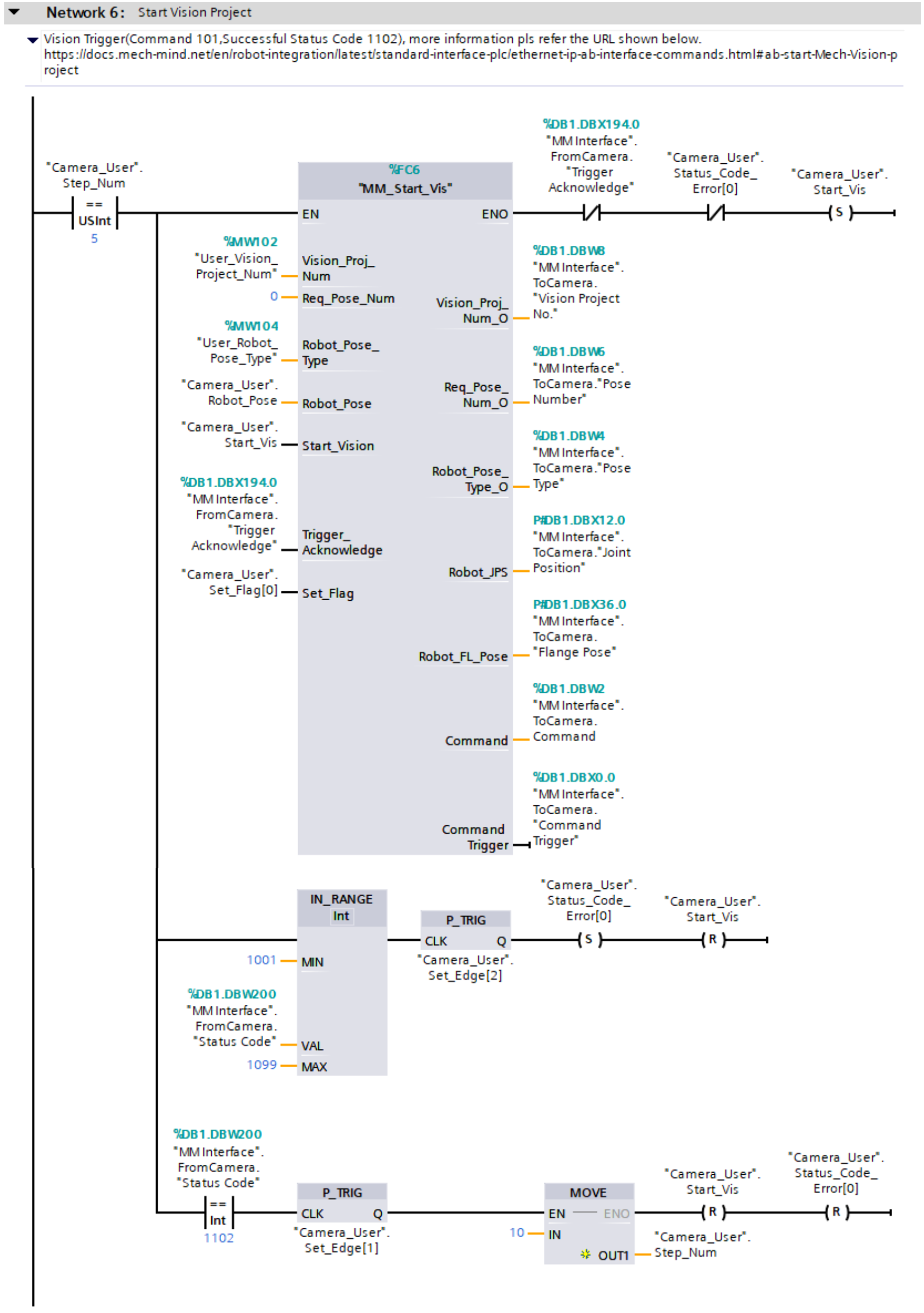
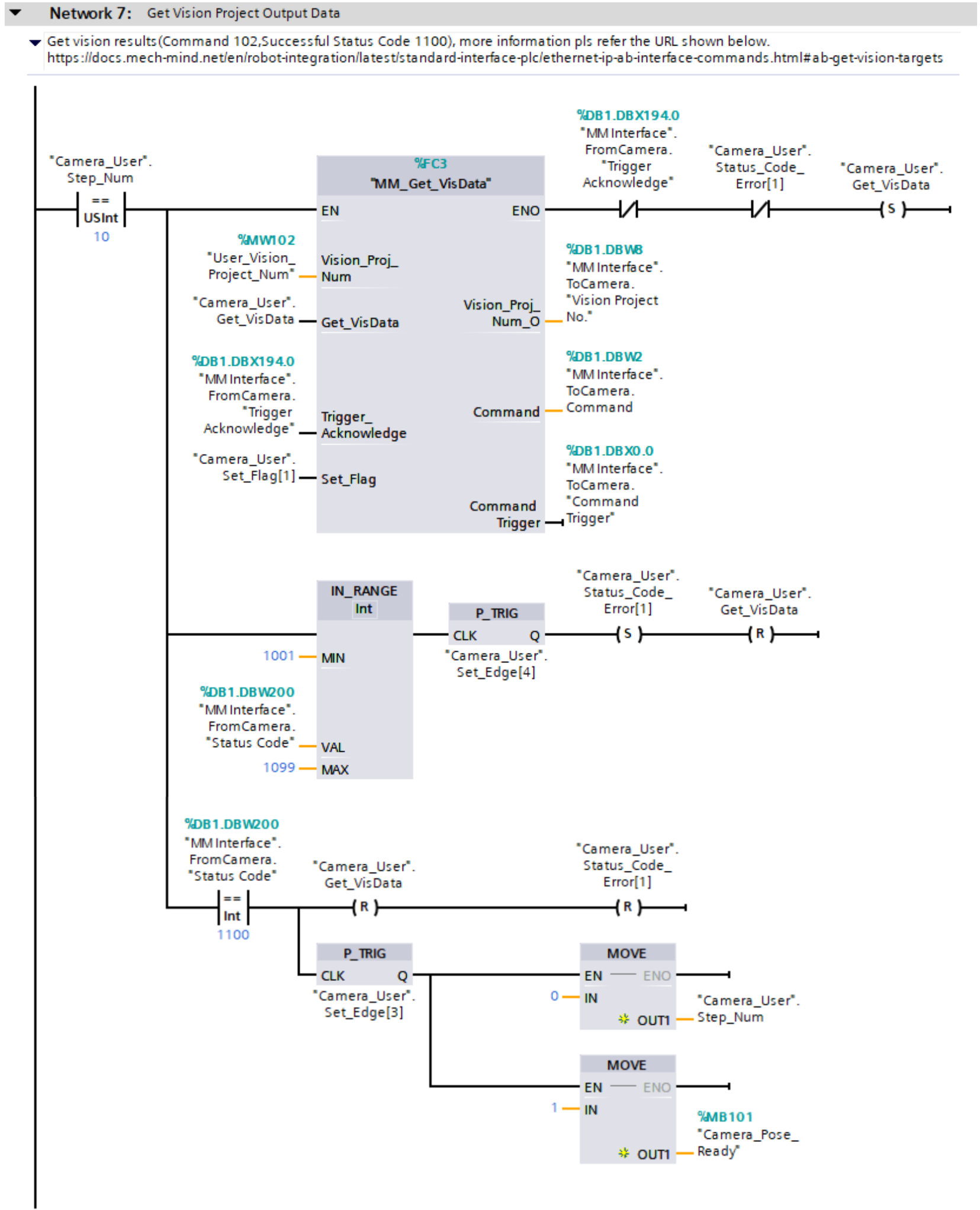
| La seule différence entre le programme d’exemple MM_S4_Vis_SwitchRecipe et le programme d’exemple MM_S1_Vis_Basic est que MM_S4_Vis_SwitchRecipe peut changer la recette de paramètres dans le projet Mech-Vision (Réseau 5). En conséquence, seule la fonction de changement de recette de paramètres est décrite dans la partie suivante. Pour les parties de MM_S4_Vis_SwitchRecipe identiques à celles de MM_S1_Vis_Basic, voir Programme d’exemple 1: MM_S1_Vis_Basic. |
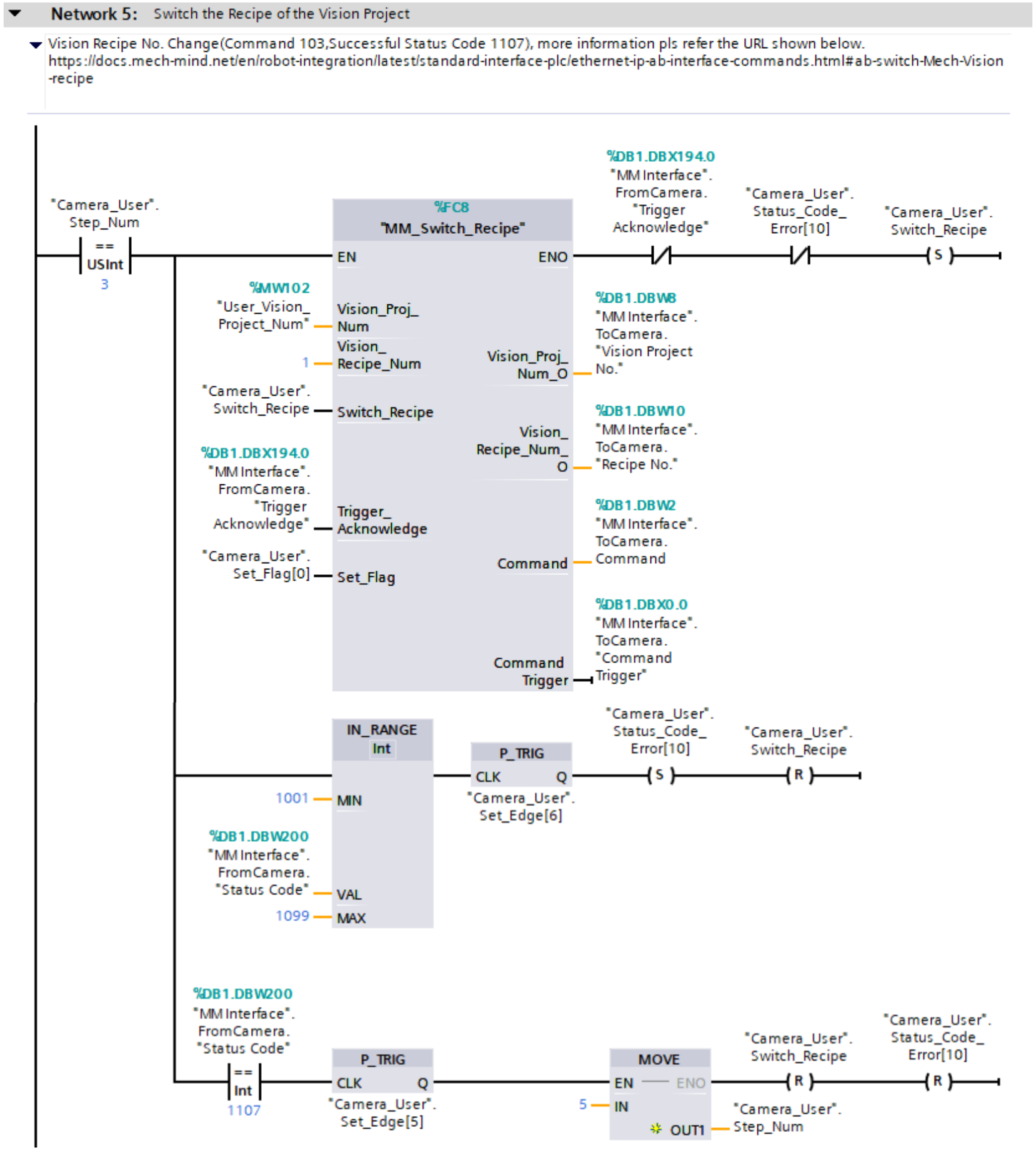
La figure ci-dessous décrit le processus du programme d’exemple ci-dessus. La fonction de changement de la recette de paramètres dans le projet Mech-Vision du programme ci-dessus est illustrée par la section indiquée par la ligne rouge dans la figure ci-dessous.
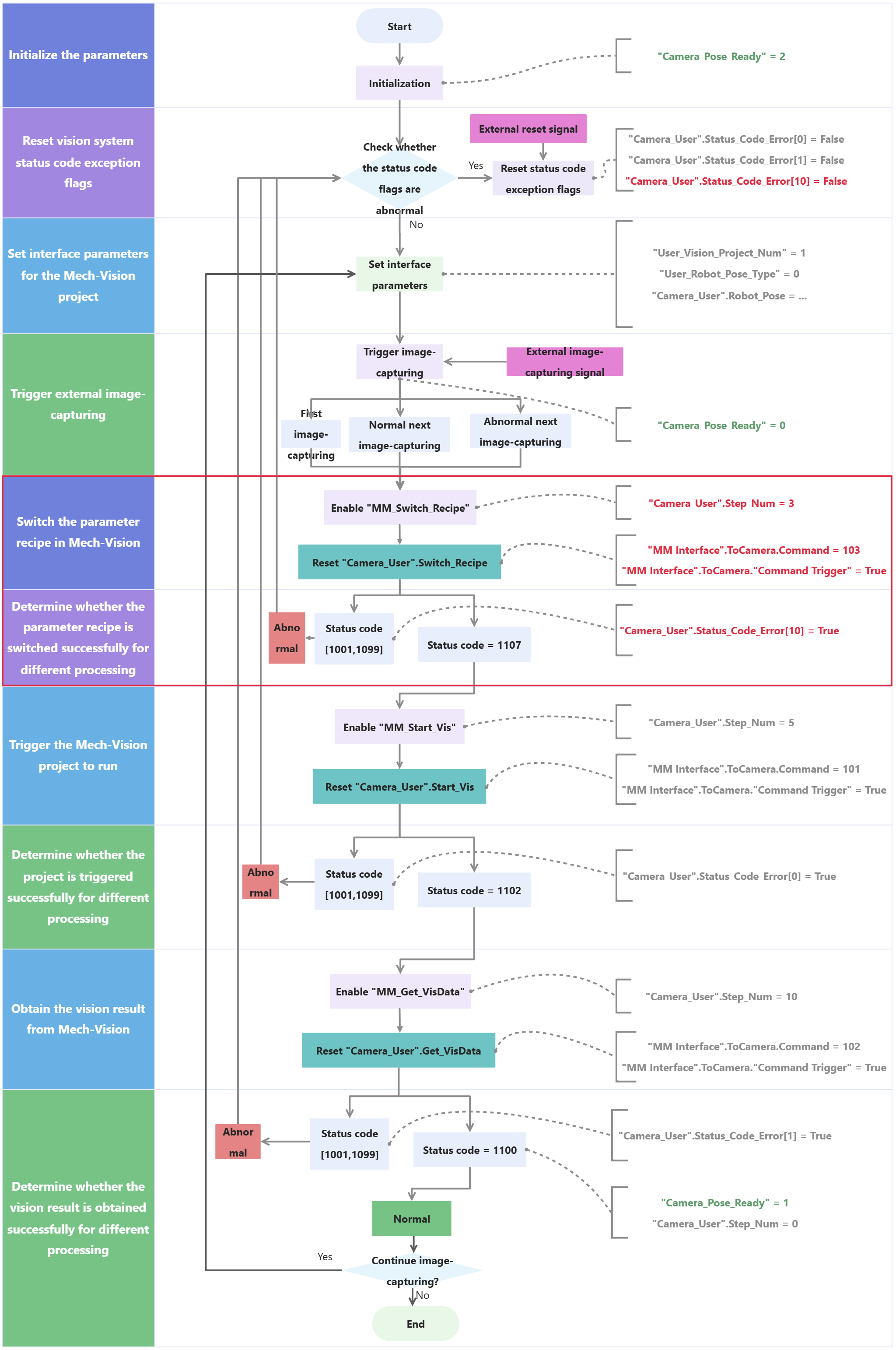
Le tableau ci-dessous décrit le processus de changement de la recette de paramètres dans le projet Mech-Vision.
|
| Feature | Description | ||
|---|---|---|---|
Changer la recette de paramètres de Mech-Vision et déterminer les opérations suivantes en fonction de la réussite ou non du changement de recette |
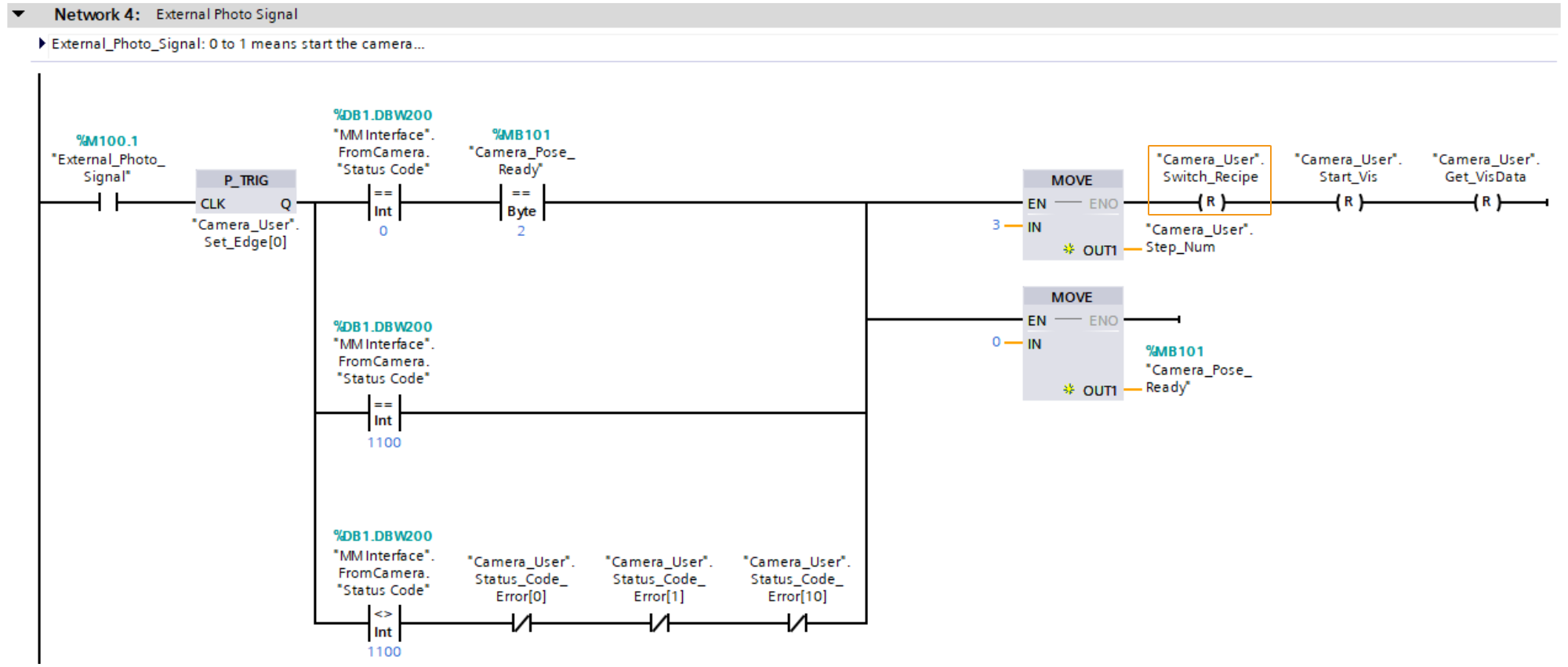
Le réseau 5 indique que si "Camera_User".Step_Num est défini sur 3, les opérations suivantes sont effectuées.
|