Configurer la communication de l’interface standard avec ABB (RobotWare 7)
This guide shows how to load the Standard Interface program files to an ABB robot and establish the Standard Interface communication between Mech-Mind Vision System and the robot.
| Dans cette section, vous chargerez le programme d’interface standard du robot et les fichiers de configuration sur le système du robot afin d’établir la communication de l’interface standard entre le système de vision et le robot. |
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Modèle de contrôleur : OmniCore
-
Version de RobotWare : 7.7
Cliquez ici pour les instructions
-
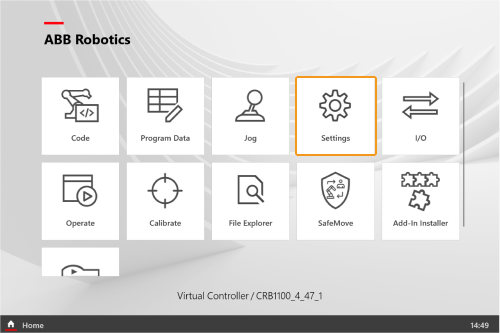
Dans l’interface d’accueil du pupitre d’enseignement, sélectionnez .
-
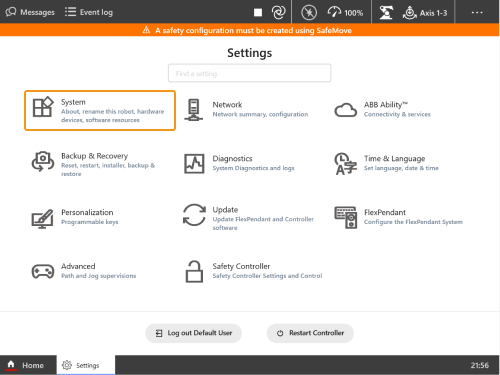
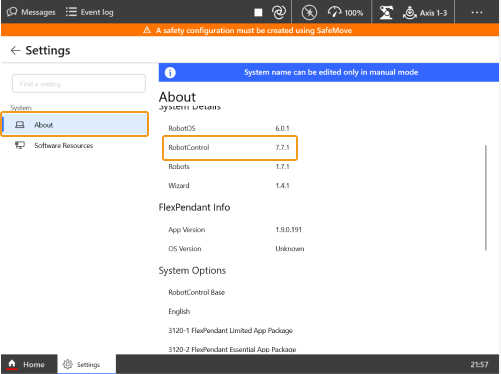
Cliquez sur À propos. Dans la section Détails du système, vérifiez si la version de RobotWare est 7.7.
-
Configurer la connexion réseau
Connecter le matériel
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port WAN du contrôleur du robot. La figure suivante montre un exemple de port WAN.
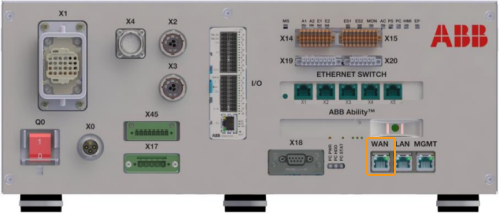
| Le câble Ethernet doit être connecté au port WAN. |
Définir l’adresse IP
-
Touchez
 pour ouvrir Panneau de contrôle, puis sélectionnez .
pour ouvrir Panneau de contrôle, puis sélectionnez .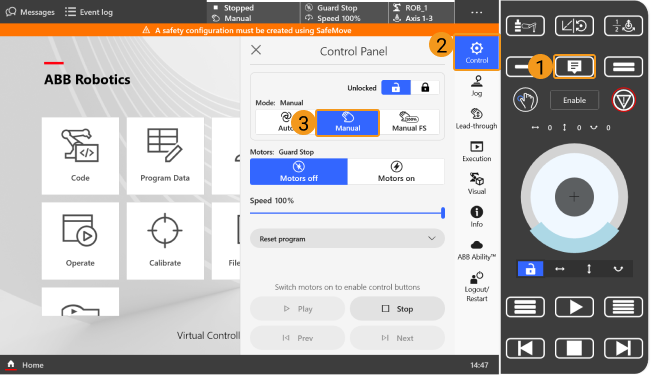
-
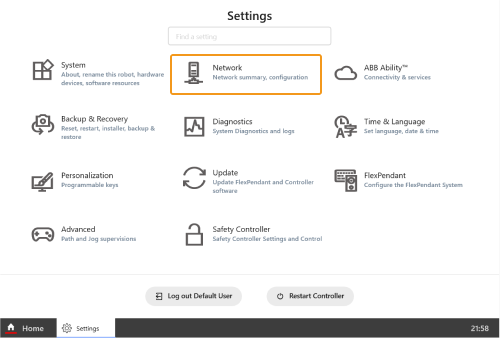
Dans l’interface d’accueil du pupitre d’enseignement, sélectionnez .
-
Cliquez sur Réseau public, sélectionnez Utiliser l’adresse IP suivante, puis définissez Adresse IP, Masque de sous-réseau et Passerelle par défaut.
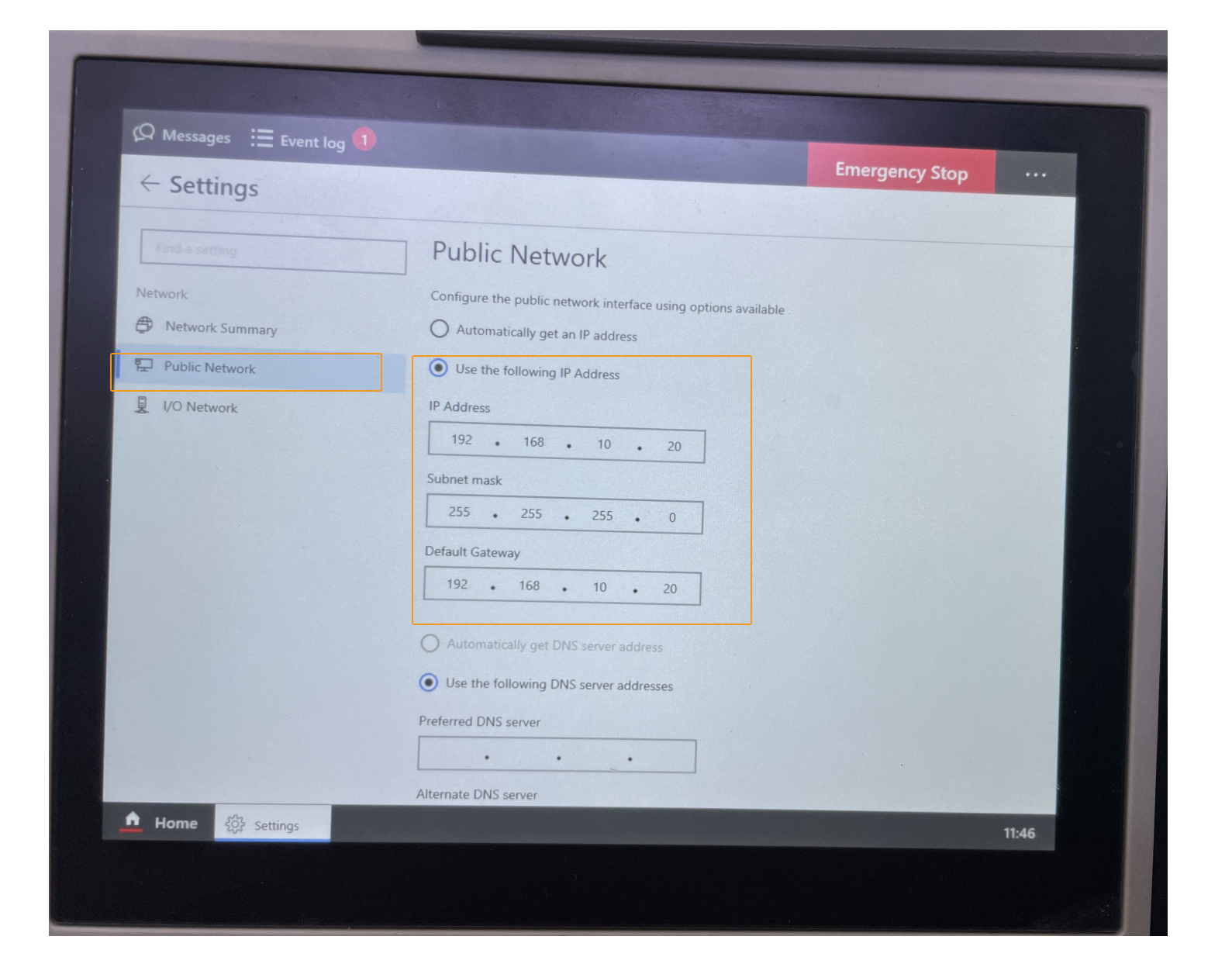
Lorsque vous définissez les adresses IP, distinguez l’adresse IP du port WAN de celle du port LAN. -
Dans l’IPC, définissez l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, les adresses IP de l’IPC et du contrôleur doivent se trouver dans le même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 sont dans le même sous-réseau.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
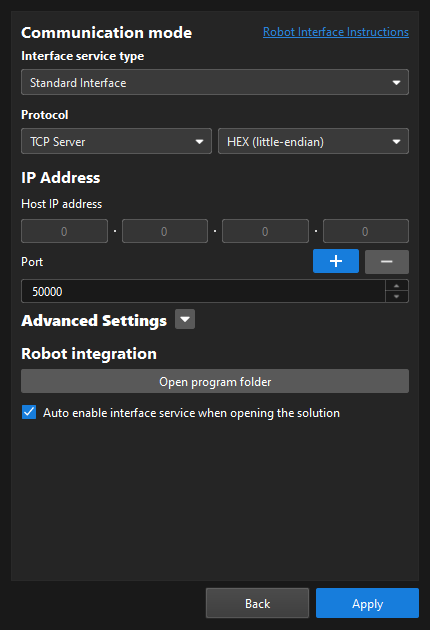
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et HEX (little-endian) pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
-
Si vous souhaitez charger manuellement des fichiers de programme, vous devez effectuer cette étape. Sinon, ignorez cette étape.
-
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Activer le service réseau RapidSockets
-
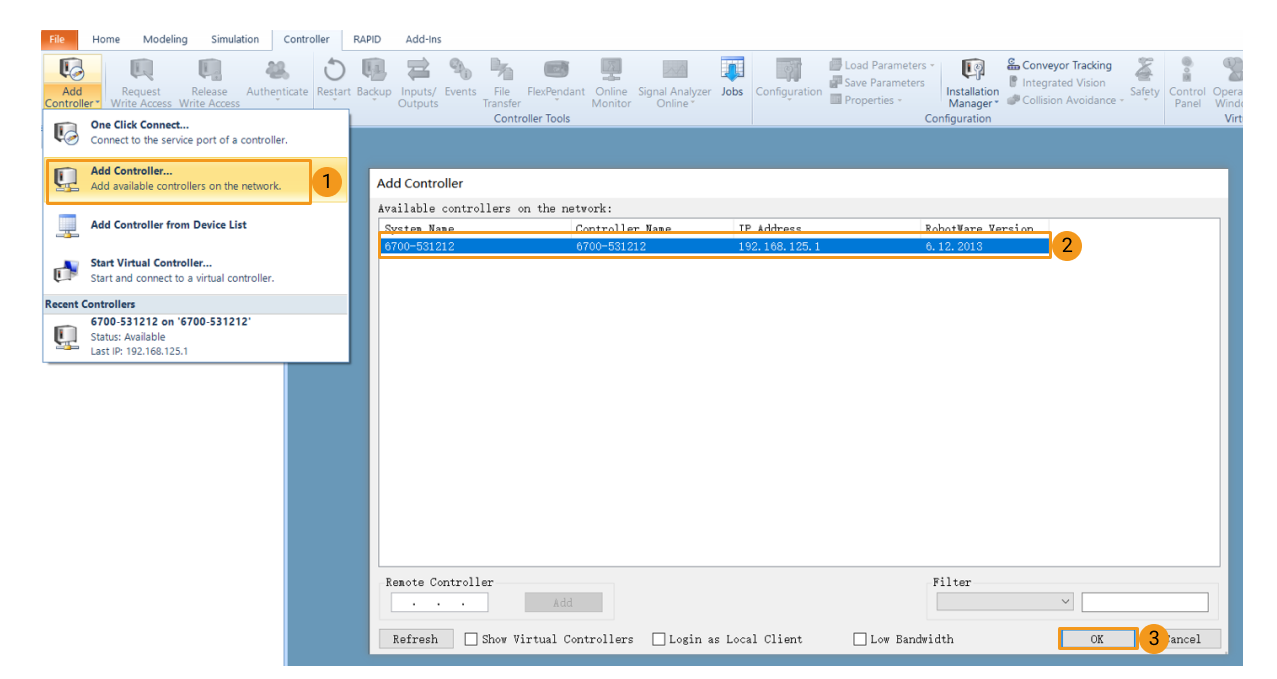
Le câble Ethernet est connecté au port WAN du contrôleur. Pour ajouter le contrôleur, vous pouvez ouvrir RobotStudio, cliquer sur Ajouter un contrôleur, puis sélectionner le contrôleur et cliquer sur OK. Après l’ajout du contrôleur, le port de gestion du contrôleur sera connecté automatiquement.
-
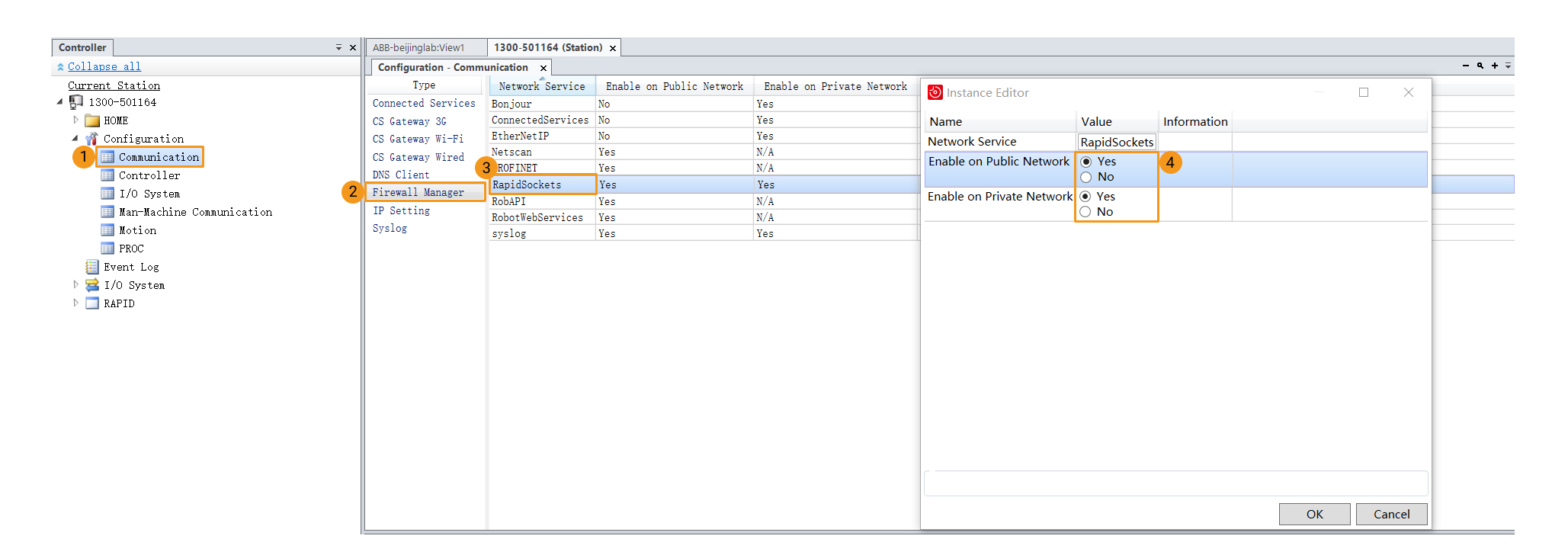
Suivez les étapes illustrées ci-dessous pour activer le service réseau RapidSockets.
-
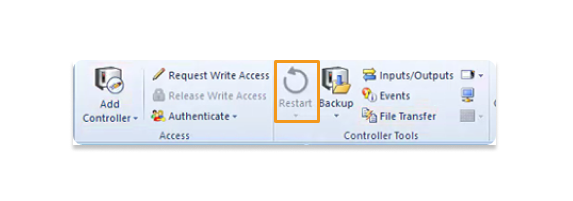
Cliquez sur Redémarrer pour redémarrer le contrôleur. Les modifications ne prennent effet qu’après le redémarrage du contrôleur.
Charger les fichiers du programme sur le robot (Auto)
Vous pouvez suivre les instructions ci-dessous pour permettre le chargement automatique des programmes de l’interface standard ou des programmes d’exemple de l’interface standard vers le robot. Dans cet exemple, les programmes de l’interface standard sont chargés automatiquement en suivant les étapes ci-dessous. Les étapes pour charger automatiquement les programmes d’exemple de l’interface standard sont similaires.
| Si le processus de chargement automatique échoue et que vous ne pouvez pas résoudre le problème, passez à Charger les fichiers du programme sur le robot (Manuel). |
-
Touchez
pour ouvrir Panneau de contrôle, puis sélectionnez .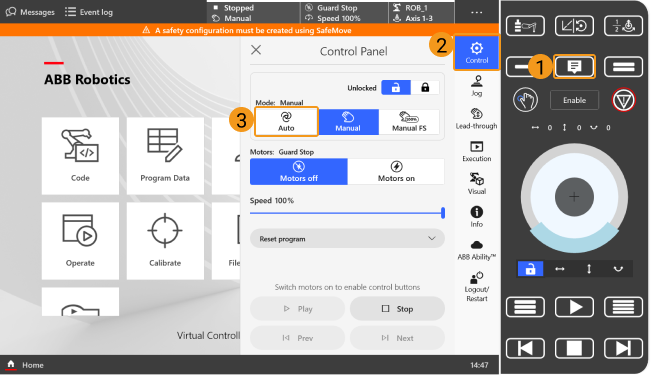
-
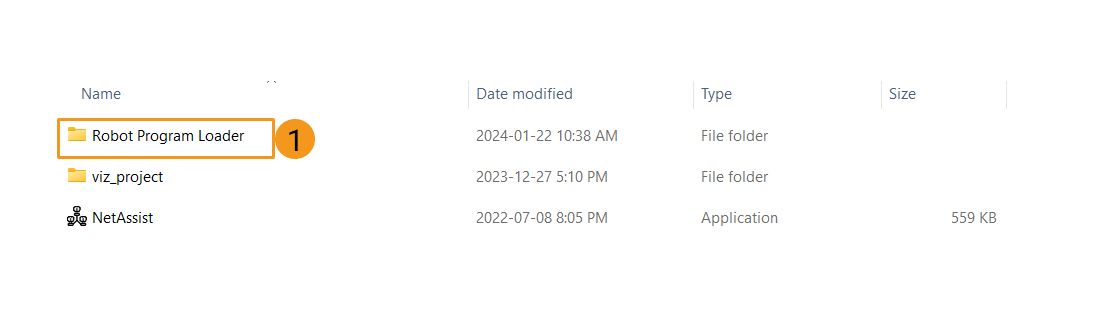
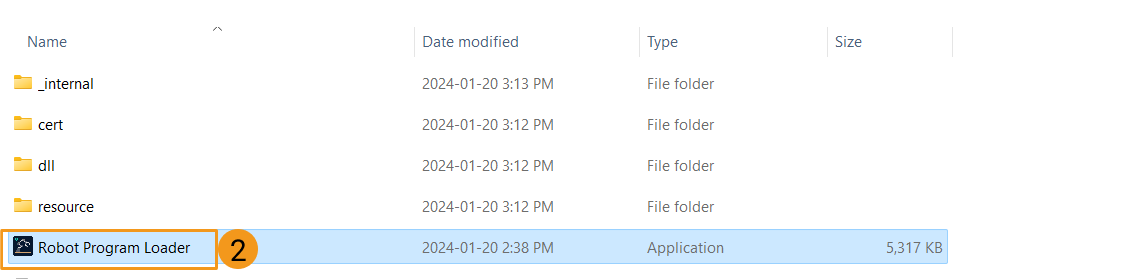
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, allez au dossier Robot Program Loader via le chemin Communication Component\tool\Robot Program Loader, puis double-cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur apparaît.
Pour changer de langue dans le chargeur, sélectionnez une langue différente dans la liste déroulante en haut à droite et redémarrez le chargeur pour que la nouvelle langue prenne effet. -
Sélectionnez la marque de robot ABB, saisissez l’adresse IP réelle du robot, puis cliquez sur Connecter.
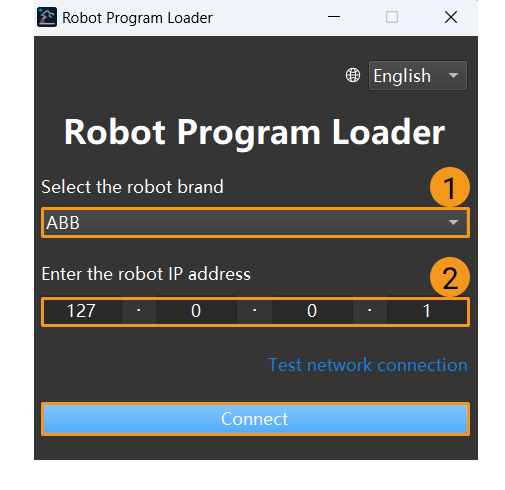
Si la connexion échoue, cliquez sur Tester la connexion réseau dans le coin inférieur droit pour résoudre le problème. -
Dans l’interface ABB Program loading, sélectionnez un dossier pour stocker les fichiers de sauvegarde puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi s’affiche dans la section Log.
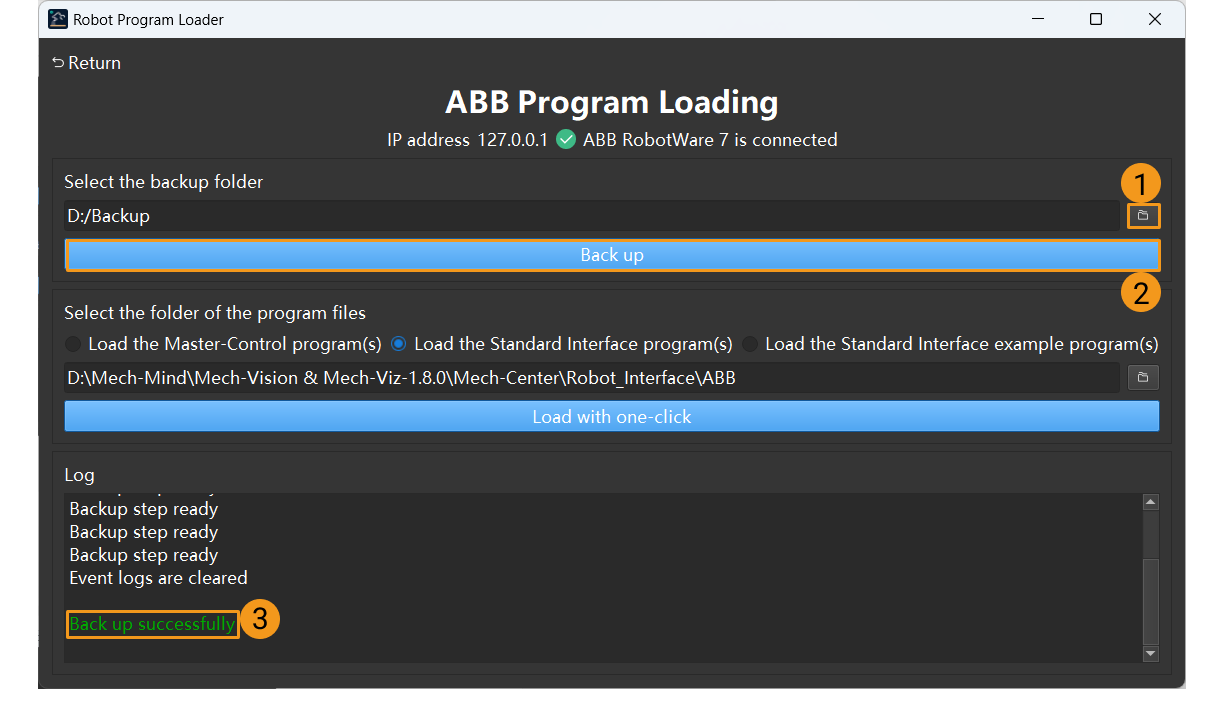
Si des erreurs surviennent lors du processus de chargement ultérieur, les fichiers peuvent être utilisés pour réinitialiser le système du robot. -
Après la réussite de la sauvegarde, sélectionnez Charger le programme d’interface standard pour confirmer le dossier qui stocke les fichiers du programme et cliquez sur Charger en un clic. Si les fichiers sont chargés sur le robot, un message indiquant que les fichiers du programme ont été chargés avec succès apparaît dans la section Log.
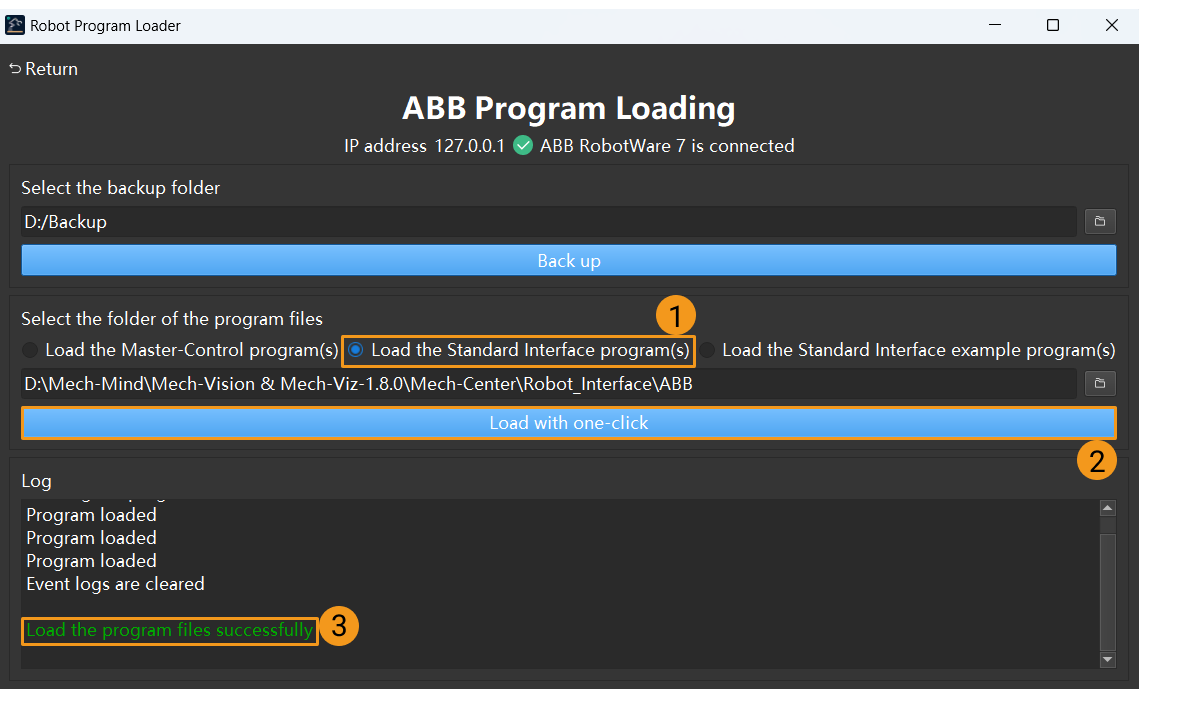
| Si vous souhaitez charger des programmes d’exemple de l’interface standard, sélectionnez Charger les programmes d’exemple de l’interface standard puis cliquez sur Charger en un clic. |
Une fois le processus de chargement automatique terminé, passez à Tester la communication de l’interface standard.
Charger les fichiers du programme sur le robot (Manuel)
Si le processus Charger les fichiers du programme sur le robot (Auto) est réussi, passez cette section.
Avant de charger manuellement des fichiers sur le robot, nous vous recommandons d’effectuer une sauvegarde. De cette façon, vous pouvez réinitialiser le système du robot en cas d’opération incorrecte.
|
Si un fichier de programme portant le même nom existe déjà, veuillez le supprimer ou le renommer avant de charger le nouveau. |
Préparer les fichiers du programme
-
Branchez la clé USB sur le port USB de l’IPC.
-
Sur l’IPC, ouvrez le dossier
RobotWare 7dans le dossier du programme ouvert (le dossierABB). Changez l’extension de chaque fichier en .modx, copiez tous les fichiers sur la clé USB, puis débranchez la clé USB.Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/ABBdu répertoire d’installation de Mech-Vision et Mech-Viz.
Charger les fichiers sur le robot
-
Branchez la clé USB sur le port USB à l’arrière du pupitre d’enseignement.
-
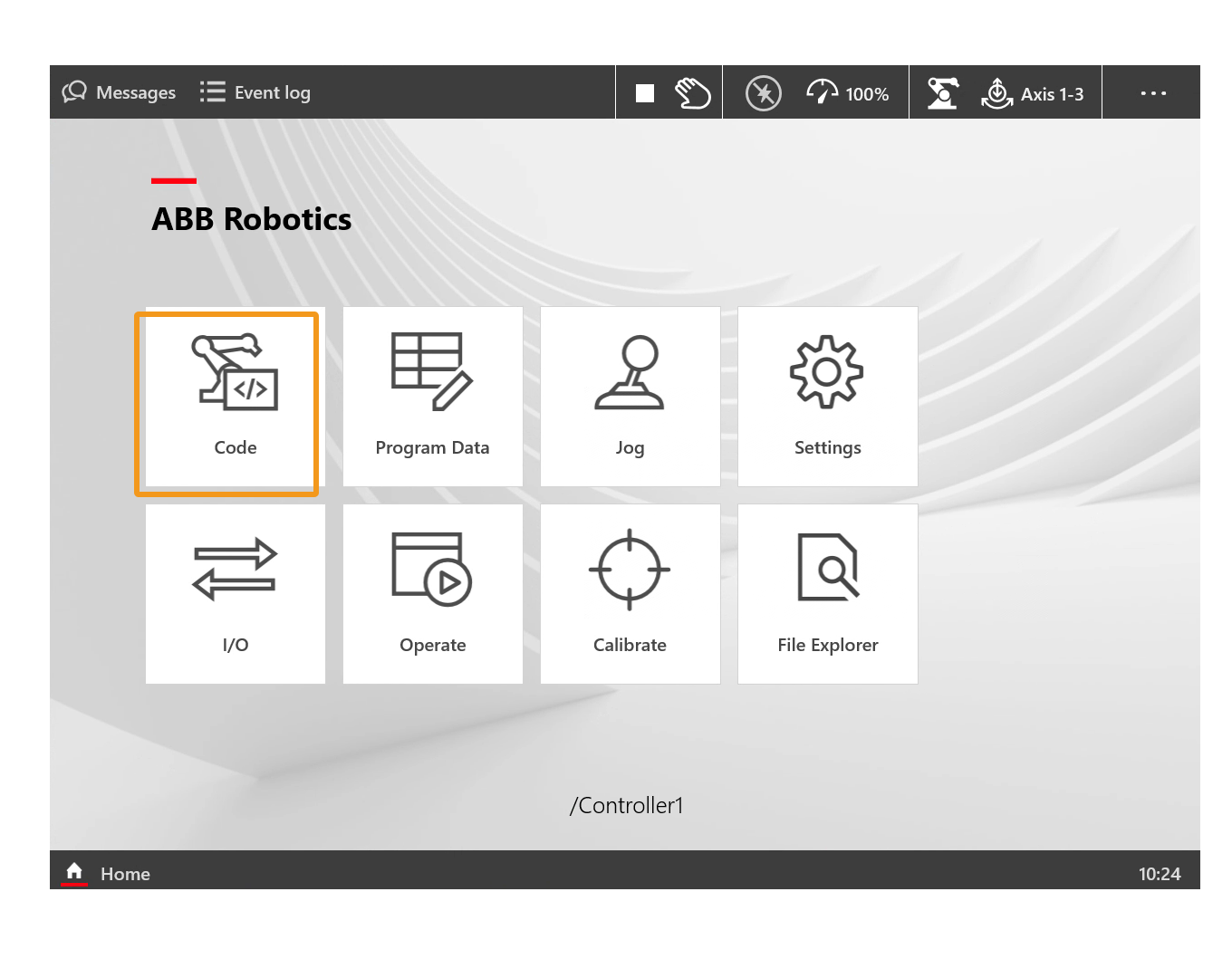
Dans l’interface d’accueil du pupitre d’enseignement, cliquez sur Code.
-
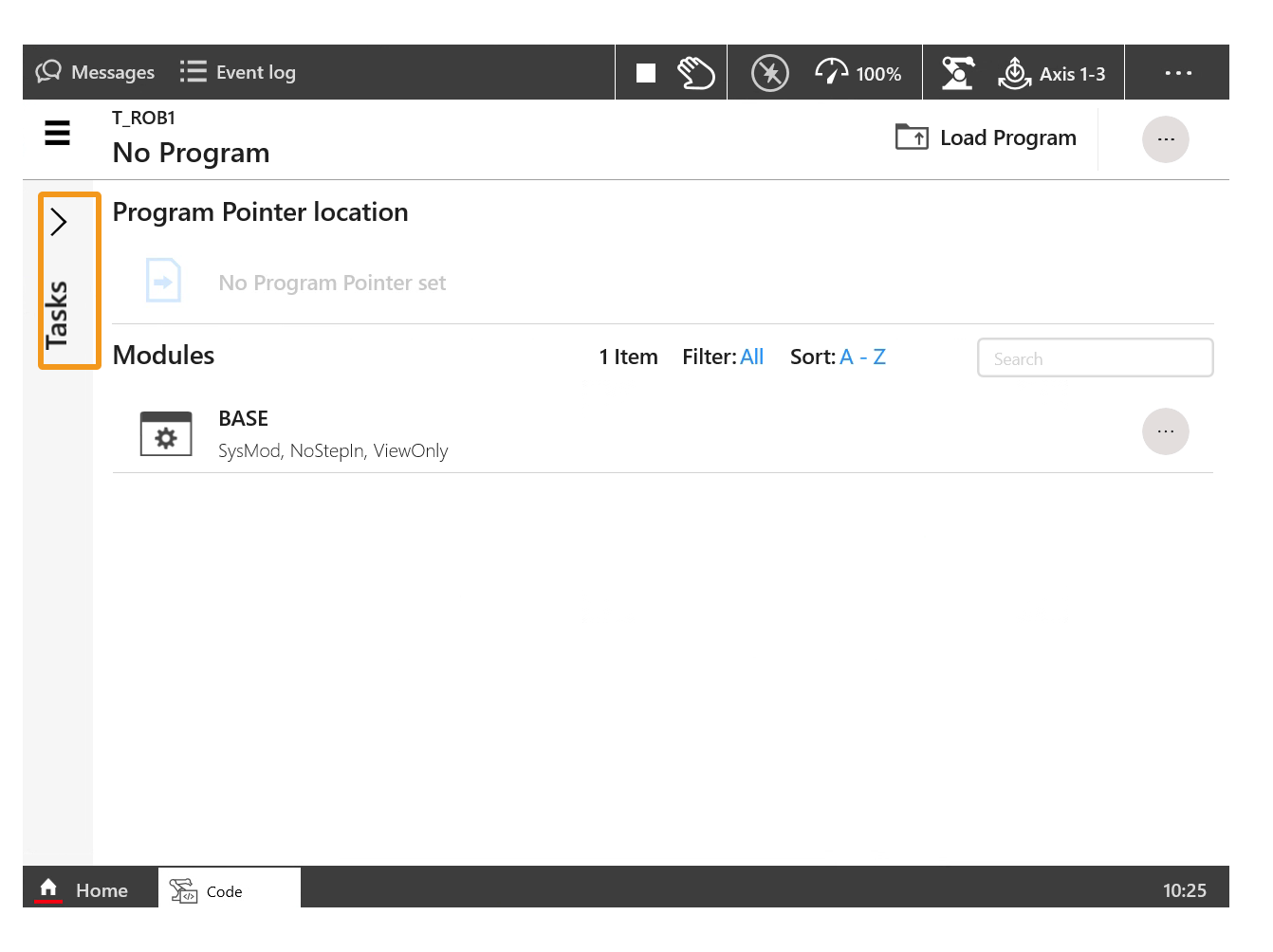
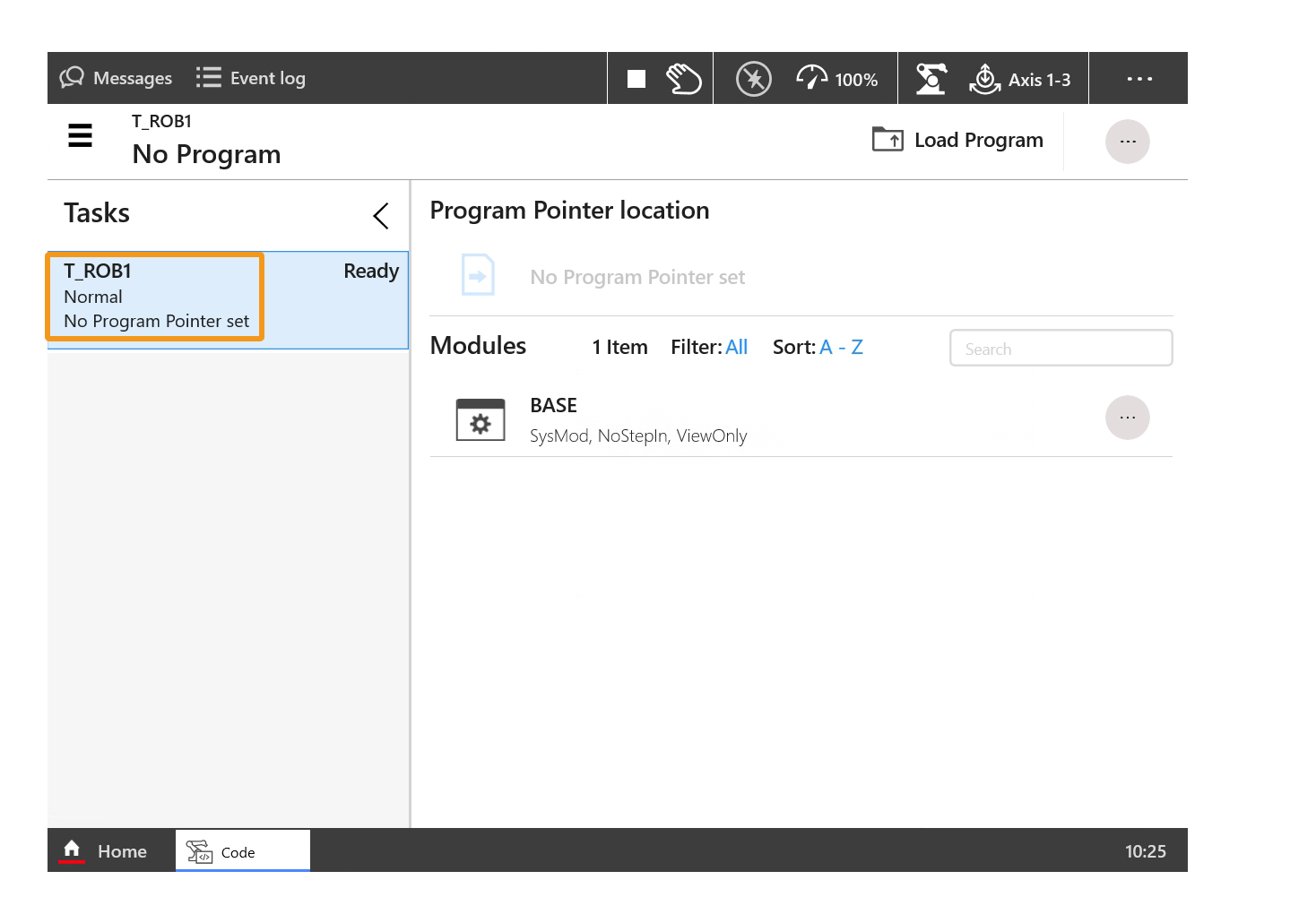
Cliquez sur Tâches. Dans le panneau Tâches qui s’affiche, sélectionnez T_ROB1.
-
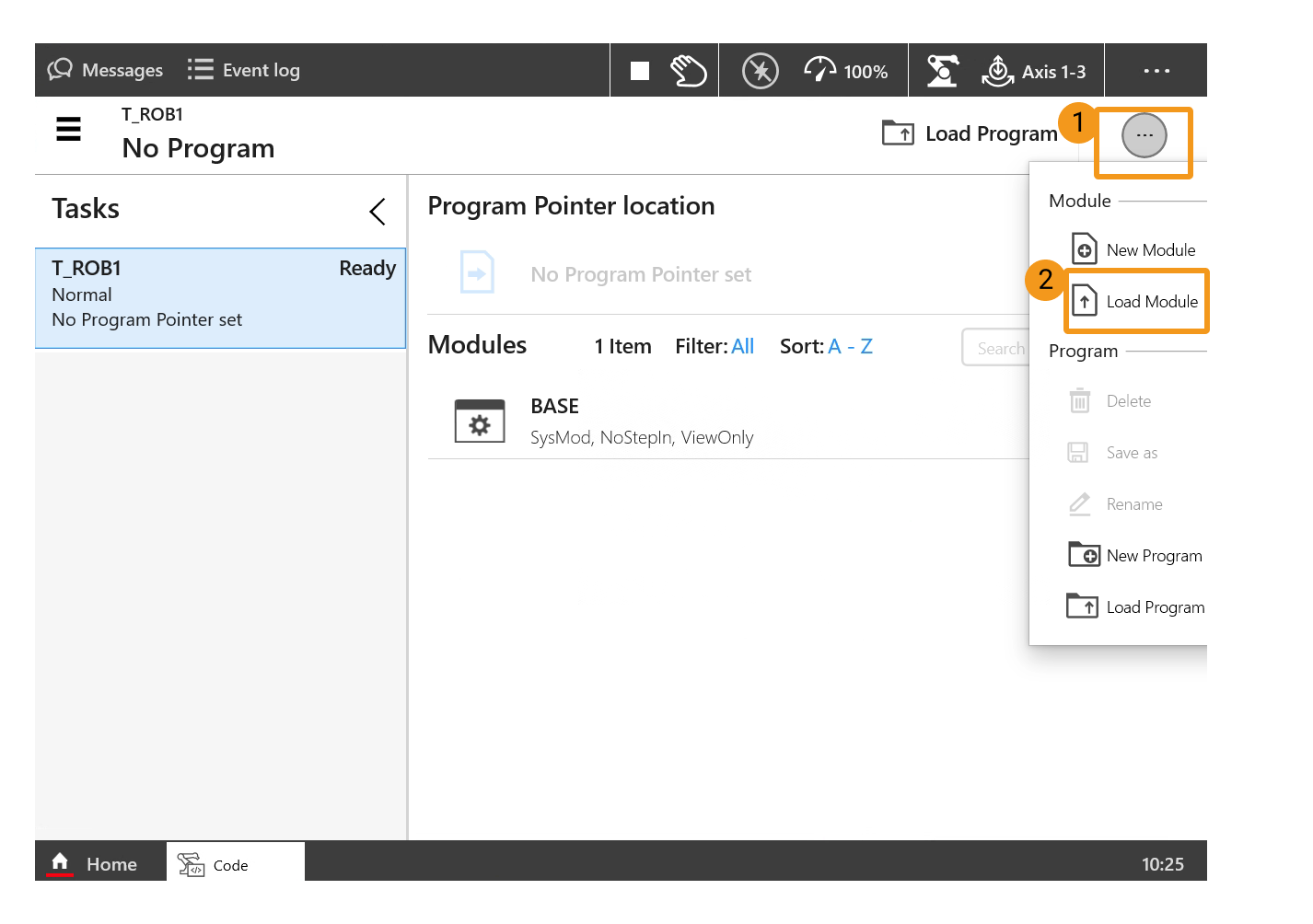
Cliquez sur le menu dans le coin supérieur droit, puis cliquez sur Charger le module.
-
Cliquez sur KINGSTON(D:), sélectionnez
MM_Module.modxdans les fichiers de la clé USB, puis cliquez sur Charger.Dans cet exemple, KINGSTON apparaît dans le nom de la clé USB. Cela est dû à l’utilisation d’une clé USB Kingston. Si vous utilisez une clé USB d’une autre marque, le nom de la marque apparaîtra dans le nom de la clé USB. -
Répétez les étapes précédentes pour copier
MM_Auto_Calib.modxetMM_Com_Test.modxvers le système du robot. La figure suivante montre l’interface après le chargement des trois fichiers.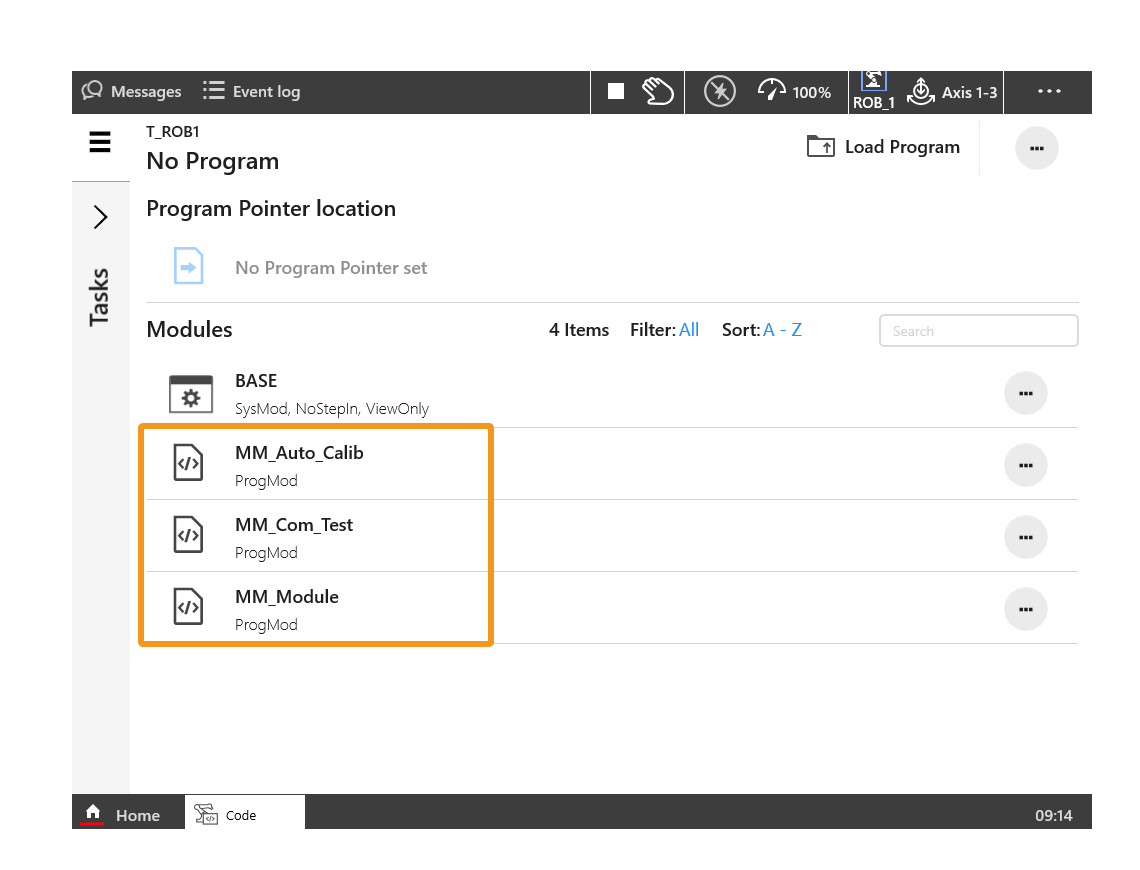
Tester la communication de l’interface standard
Sélectionner et modifier le programme utilisé pour le test de communication
-
Touchez
pour ouvrir Panneau de contrôle, puis sélectionnez .
-
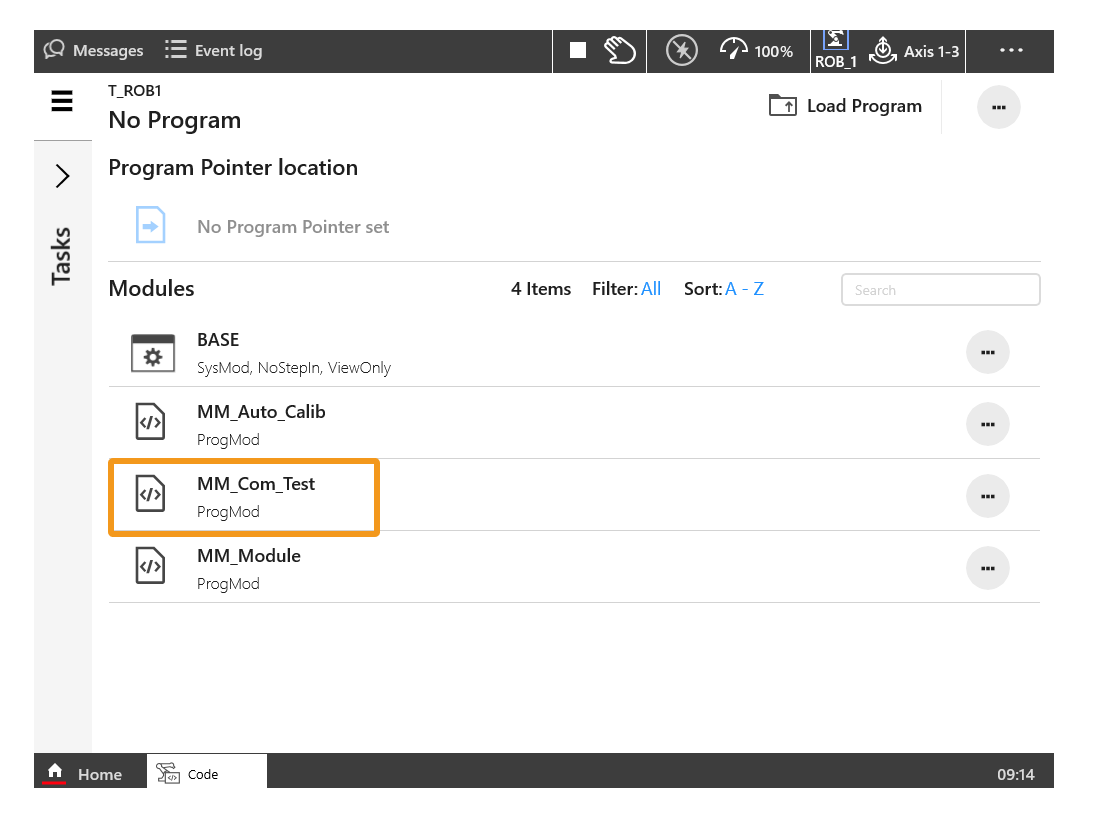
Dans l’interface de code, double-cliquez sur MM_Com_Test.
-
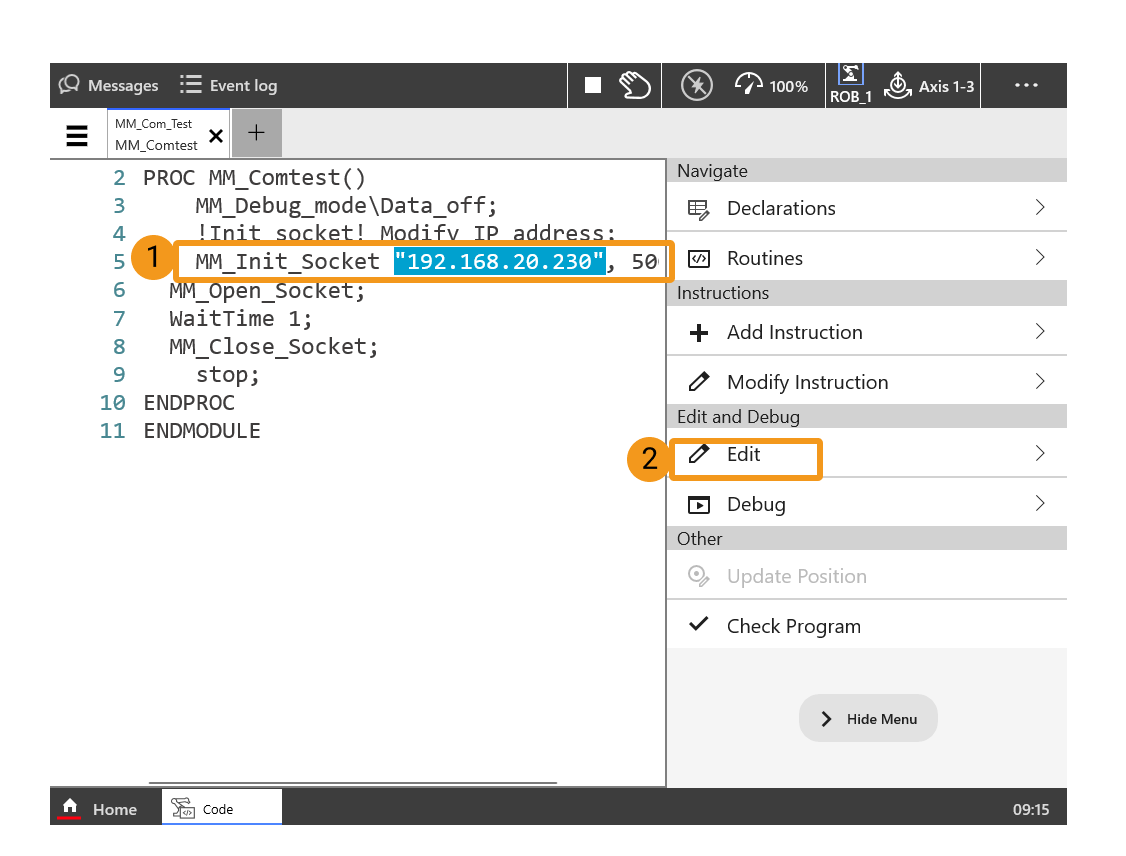
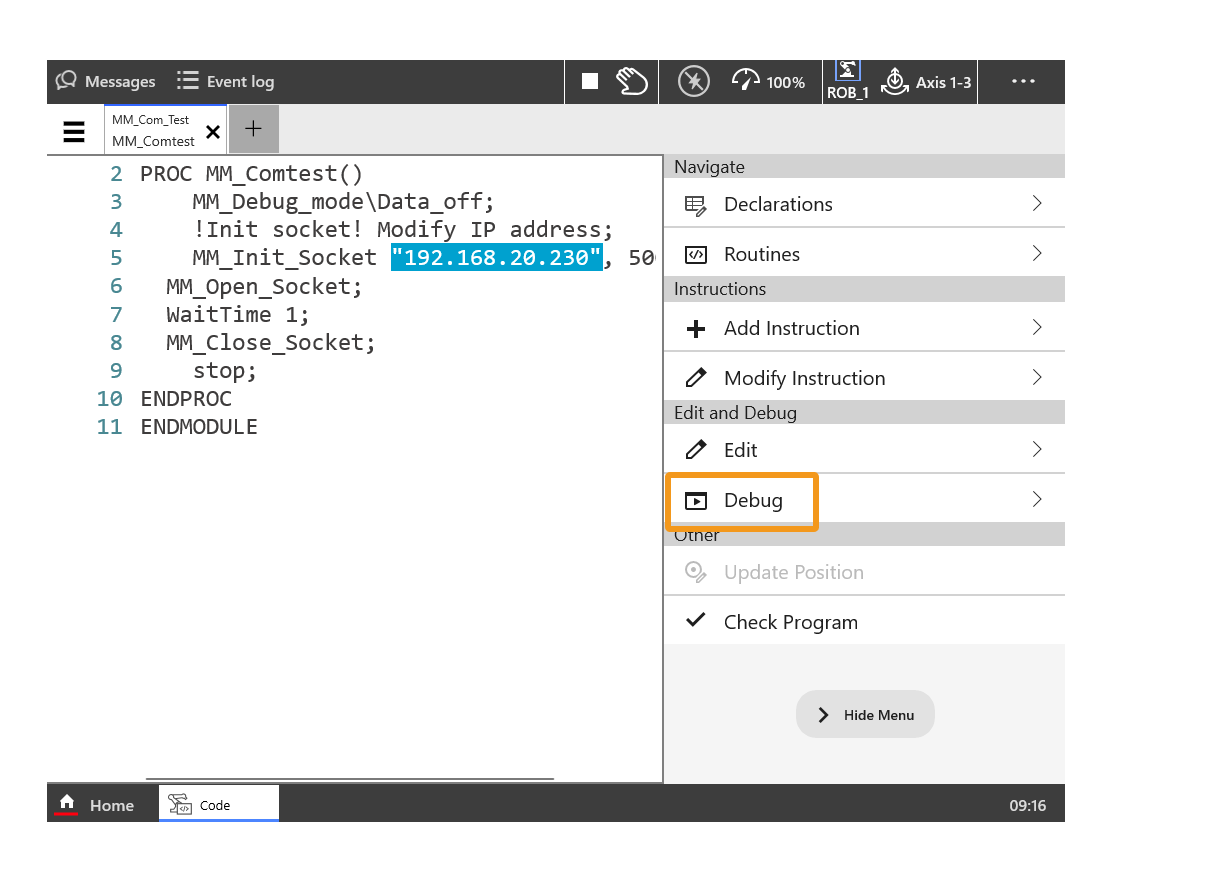
Double-cliquez sur l’adresse IP du programme et cliquez sur Modifier pour remplacer l’adresse IP par celle de l’IPC. Si le numéro de port hôte défini dans Mech-Vision est modifié, le numéro de port 50000 ici doit être changé pour le numéro de port hôte dans Mech-Vision.
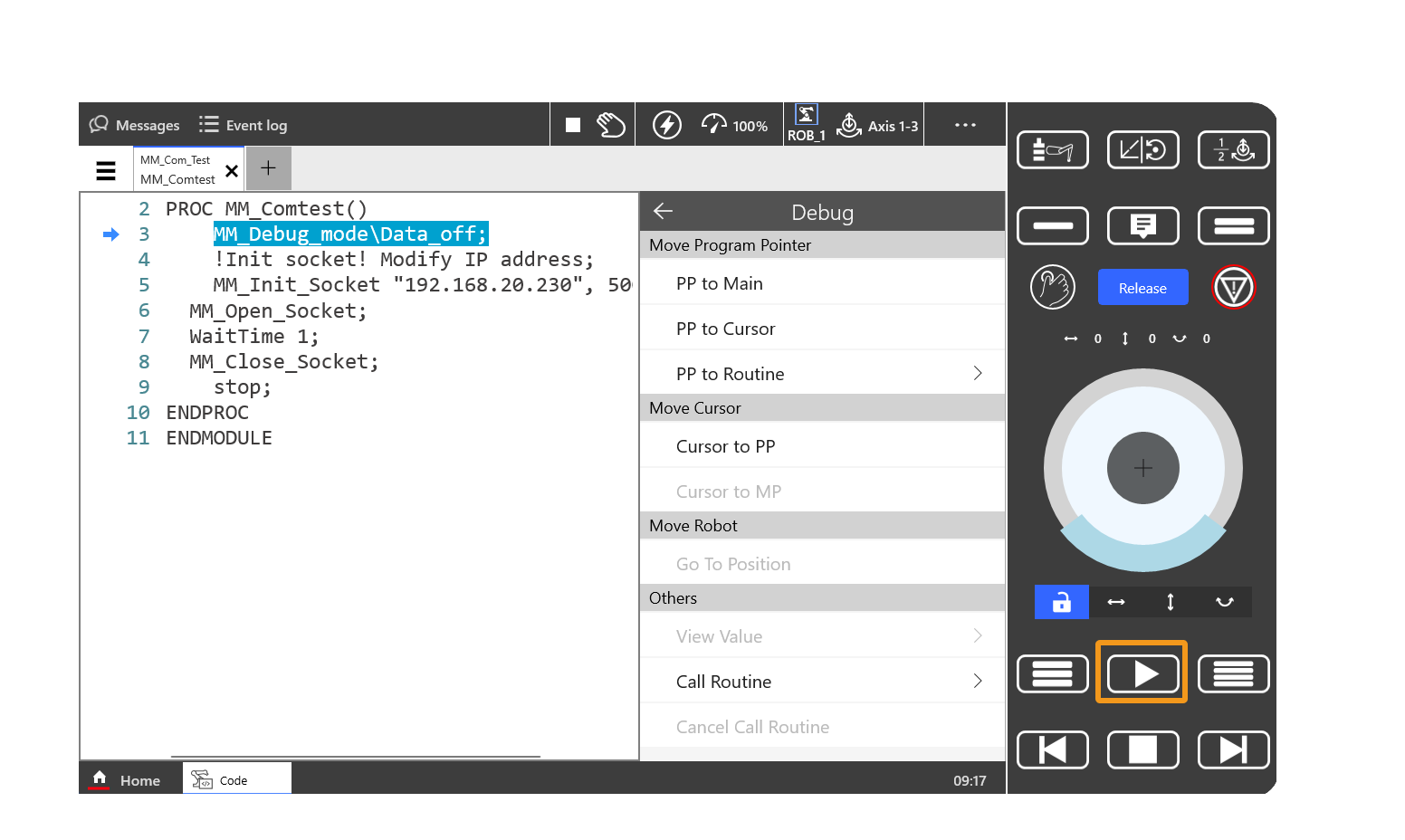
Exécuter le programme et tester la connexion
-
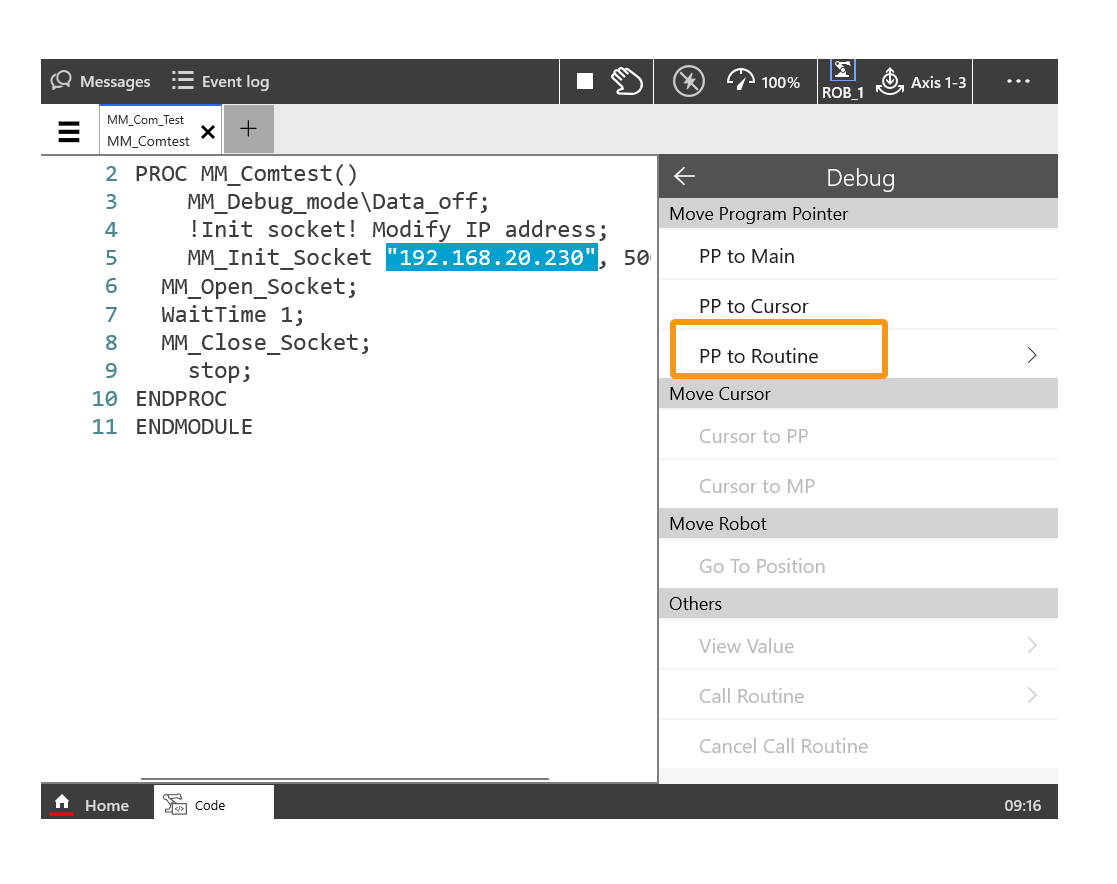
Dans l’interface suivante, sélectionnez .
-
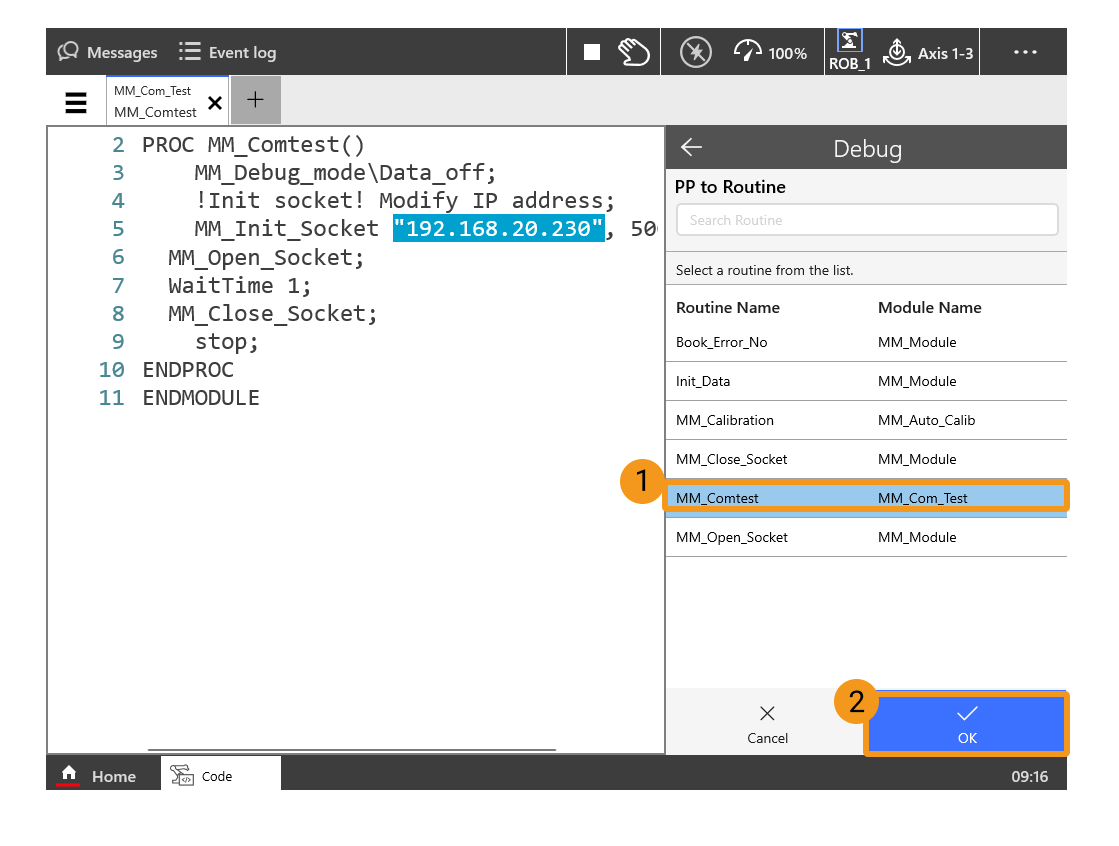
Confirmez que MM_Comtest est sélectionné et cliquez sur OK.
-
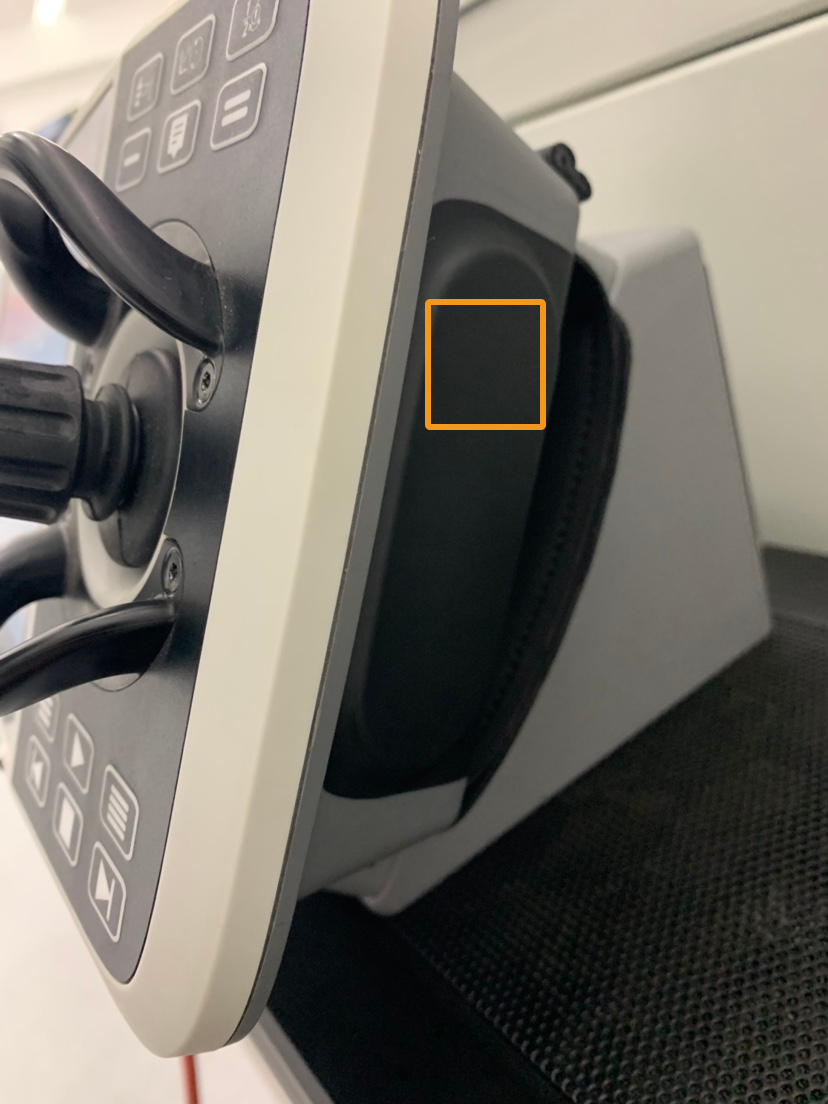
Appuyez et maintenez le bouton suivant pour alimenter le moteur. Dans ce cas, l’icône d’état sur le pupitre d’enseignement indique que le moteur est alimenté.

-
Cliquez sur le bouton Exécuter sur le pupitre d’enseignement.
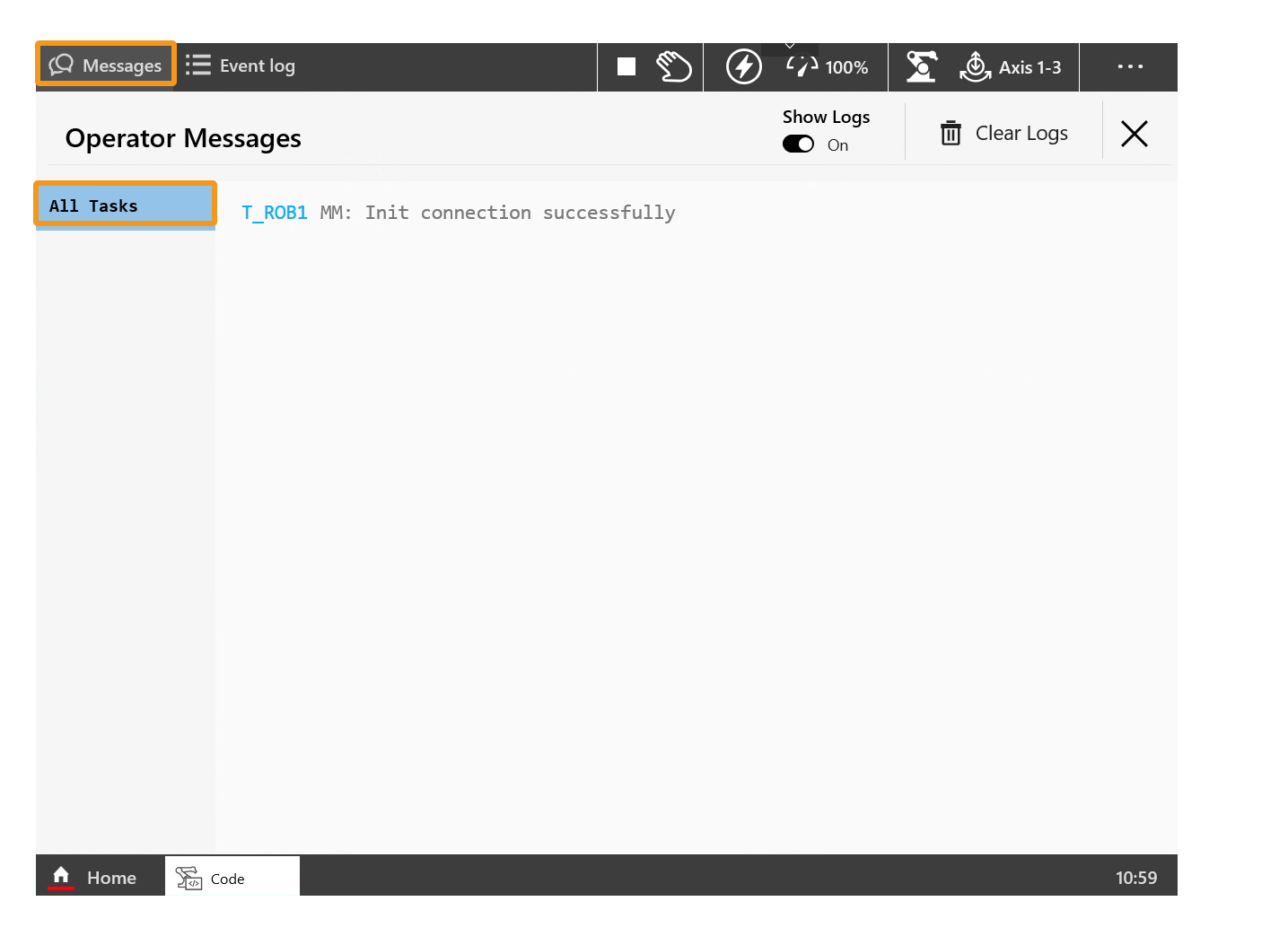
-
Cliquez sur Messages dans le coin supérieur gauche et sélectionnez Toutes les tâches. Le message suivant s’affiche.
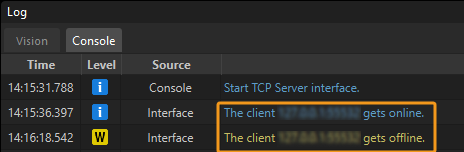
-
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Log de Mech-Vision.
Dépannage
Si le programme a été chargé mais que la connexion au robot échoue, veuillez vérifier si les exigences suivantes sont satisfaites.
-
Côté IPC :
-
Le pare-feu est désactivé.
-
L’IPC peut envoyer un ping à l’adresse IP du robot via l’invite de commandes.
-
Le logiciel antivirus n’affecte pas la connexion.
-
Les deux ports réseau de l’IPC appartiennent à des sous-réseaux différents.
-
Si l’IPC est connecté via un routeur, les autres câbles réseau n’affectent pas la connexion.
-
-
Côté robot :
-
Le câble Ethernet est correctement connecté au port WAN du contrôleur.
-
La bonne adresse IP du robot est définie. Veuillez vous assurer que c’est l’adresse IP du port WAN, et non celle d’autres ports, qui est modifiée.
-
Le programme est exécuté côté robot.
-
Confirmez que le pare-feu du robot autorise la communication réseau.
-
Annexe
Sauvegarde
Avant d’utiliser le robot, vous pouvez suivre les instructions de sauvegarde ci-dessous pour sauvegarder le système du robot afin que le système puisse être restauré en cas d’opération incorrecte.
-
Branchez la clé USB sur le port USB à l’arrière du pupitre d’enseignement.
-
Dans l’interface d’accueil du pupitre d’enseignement, sélectionnez .
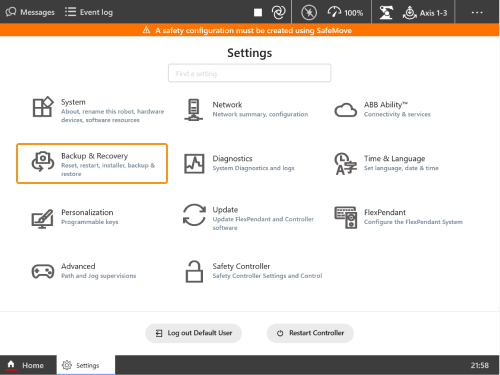
-
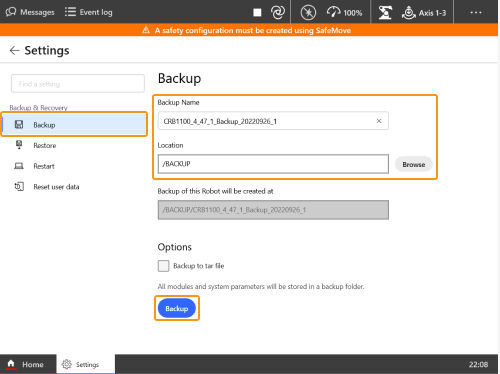
Sélectionnez Sauvegarde, réinitialisez Nom de la sauvegarde et Emplacement, puis cliquez sur Sauvegarder.
-
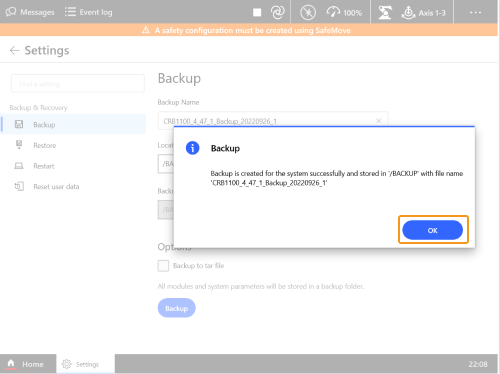
Dans la fenêtre contextuelle, cliquez sur OK pour terminer le processus de sauvegarde.
Réinitialisation
Il existe deux types de réinitialisation : réinitialisation de RAPID et réinitialisation du système.
| Si un programme Master-Control est déjà chargé, effectuez cette étape pour supprimer le programme Master-Control. N’utilisez pas un programme Master-Control conjointement avec un programme d’interface standard. |
-
La réinitialisation de RAPID supprime le programme et les données RAPID en cours et conserve les paramètres du système.
Cliquez ici pour les instructions
-
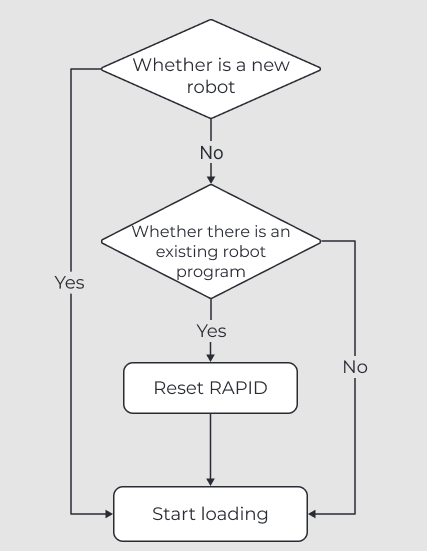
Déterminez si vous devez réinitialiser RAPID en vous basant sur le diagramme de flux suivant.
-
Dans l’interface d’accueil du pupitre d’enseignement, sélectionnez .
-
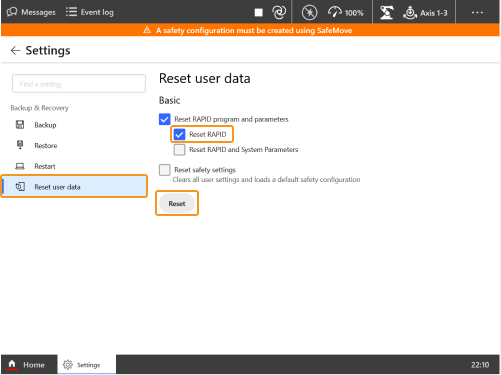
Sélectionnez Réinitialiser les données utilisateur dans le volet de navigation gauche, sélectionnez Réinitialiser PAPID, puis cliquez sur Réinitialiser.
-
Sélectionnez OK dans la fenêtre contextuelle.
-
-
La réinitialisation du système restaure les paramètres système d’usine et le programme PAPID, et réinitialise les réglages d’E/S. Si la carte PCIe et d’autres dispositifs de communication sont configurés, vous devez les reconfigurer après le redémarrage du système. Faites preuve de prudence lorsque vous sélectionnez l’option de réinitialisation du système.
Cliquez ici pour les instructions
-
Dans l’interface d’accueil du pupitre d’enseignement, sélectionnez .
-
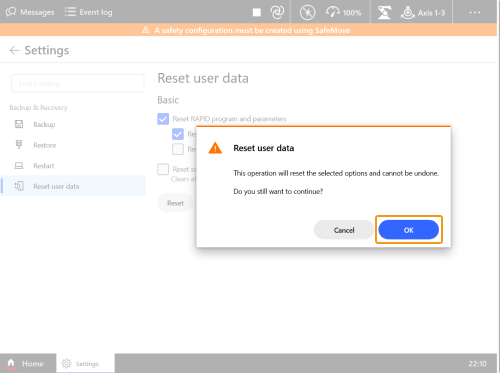
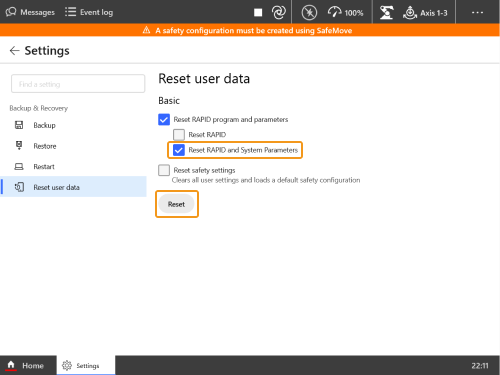
Cliquez sur Réinitialiser les données utilisateur dans le volet de navigation gauche, sélectionnez Réinitialiser PAPID et paramètres système, puis cliquez sur Réinitialiser.
-
Sélectionnez OK dans la fenêtre contextuelle.
-