Programmes d’exemple JAKA
Ce sujet présente les programmes d’exemple qui exécutent une tâche réelle de prise et dépose.
Programmes d’exemple
Veuillez vous assurer que vous avez chargé les programmes d’exemple de l’interface standard JAKA.
Les programmes d’exemple sont les suivants.
Obtenir le résultat de vision depuis Mech-Vision
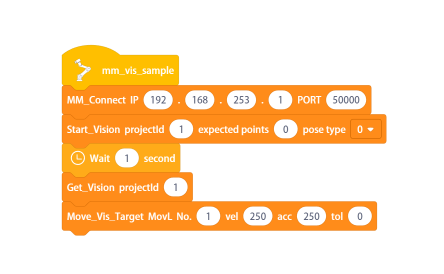
Dans la fenêtre de contrôle Programmation, faites glisser les instructions dans l’ordre indiqué ci-dessous, ou ouvrez le programme mm_vis_sample chargé.
Description du programme
-
Le nom du programme est mm_vis_sample.
-
Connectez le robot à l’IPC. Vous devez définir l’adresse IP et le numéro de port de l’IPC. Veuillez consulter MM_Connect pour plus de détails.
-
Lancez le projet Mech-Vision. Vous devez définir l’ID du projet, le nombre de poses que vous prévoyez de recevoir et le type de pose que le robot envoie à Mech-Vision. Veuillez consulter Start_Vision pour plus de détails.
-
Attendez une seconde afin d’éviter que le robot ne vibre et que le processus de capture d’images ne soit affecté.
-
Recevez le résultat de vision depuis le projet Mech-Vision. Vous devez définir l’ID du projet. Veuillez consulter Get_Vision pour plus de détails.
-
Déplacez le robot vers le point de vision reçu de Mech-Vision. Vous pouvez définir un point de passage vers lequel le robot doit se déplacer, la vitesse, l’accélération pendant le déplacement et la tolérance du point de passage. Veuillez consulter Move_Vis_Target pour plus de détails.
Obtenir la trajectoire planifiée depuis Mech-Viz
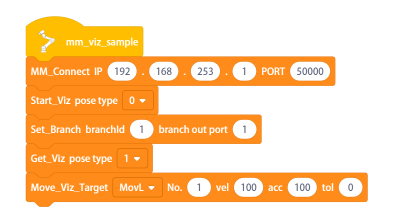
Dans la fenêtre de contrôle Programmation, faites glisser les instructions dans l’ordre indiqué ci-dessous, ou ouvrez le programme mm_viz_sample chargé.
Description du programme
-
Le nom du programme est mm_viz_sample.
-
Connectez le robot à l’IPC. Vous devez définir l’adresse IP et le numéro de port de l’IPC. Veuillez consulter MM_Connect pour plus de détails.
-
Démarrez le projet Mech-Viz. Vous devez définir le type de pose que le robot envoie à Mech-Viz. Veuillez consulter Start_Viz pour plus de détails.
-
Sélectionnez la branche suivant laquelle le projet doit se poursuivre. Vous devez définir l’ID d’étape de Branch by Msg Step et le numéro de port de sortie. Veuillez consulter Set_Branch pour plus de détails.
-
Recevez les données de Mech-Viz. Vous devez définir le type de pose du point de passage renvoyé. Veuillez consulter Get_Viz pour plus de détails.
-
Déplacez le robot vers le point de passage de la trajectoire planifiée par Mech-Viz. Vous pouvez définir un point de passage vers lequel le robot doit se déplacer, la vitesse, l’accélération pendant le déplacement et la tolérance du point de passage. Veuillez consulter Move_Viz_Target pour plus de détails.
Obtenir la trajectoire planifiée depuis Mech-Vision
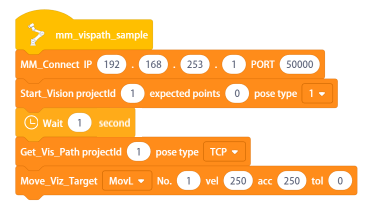
Dans la fenêtre de contrôle Programmation, faites glisser les instructions dans l’ordre indiqué ci-dessous, ou ouvrez chargé mm_vispath_sample.
Description du programme
-
Le nom du programme est mm_vispath_sample.
-
Connectez le robot à l’IPC. Vous devez définir l’adresse IP et le numéro de port de l’IPC. Veuillez consulter MM_Connect pour plus de détails.
-
Lancez le projet Mech-Vision. Vous devez définir l’ID du projet, le nombre de poses que vous prévoyez de recevoir et le type de pose que le robot envoie à Mech-Vision. Veuillez consulter Start_Vision pour plus de détails.
-
Attendez une seconde afin d’éviter que le robot ne vibre et que le processus de capture d’images ne soit affecté.
-
Recevez la trajectoire planifiée par l’étape « Planification de trajectoire » à partir du projet Mech-Vision. Vous devez définir l’ID du projet et le type de pose du point de passage renvoyé. Veuillez consulter Get_Vis_Path pour plus de détails.
-
Déplacez le robot vers le point de passage de la trajectoire planifiée par le projet. Vous pouvez définir un point de passage vers lequel le robot doit se déplacer, la vitesse, l’accélération pendant le déplacement et la tolérance du point de passage. Veuillez consulter Move_Viz_Target pour plus de détails.