Configurer la communication d’interface standard avec DENSO
Ce guide explique comment configurer la communication d’interface standard avec un robot DENSO.
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Type de robot: Robot à six axes
-
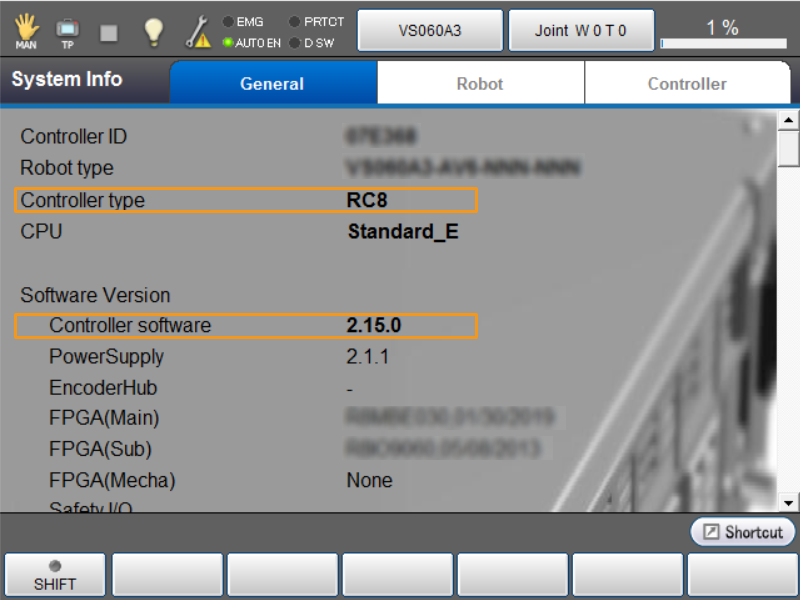
Modèle de contrôleur: RC8
-
Version du logiciel du contrôleur: 2.15.0
Cliquez ici pour les instructions
-
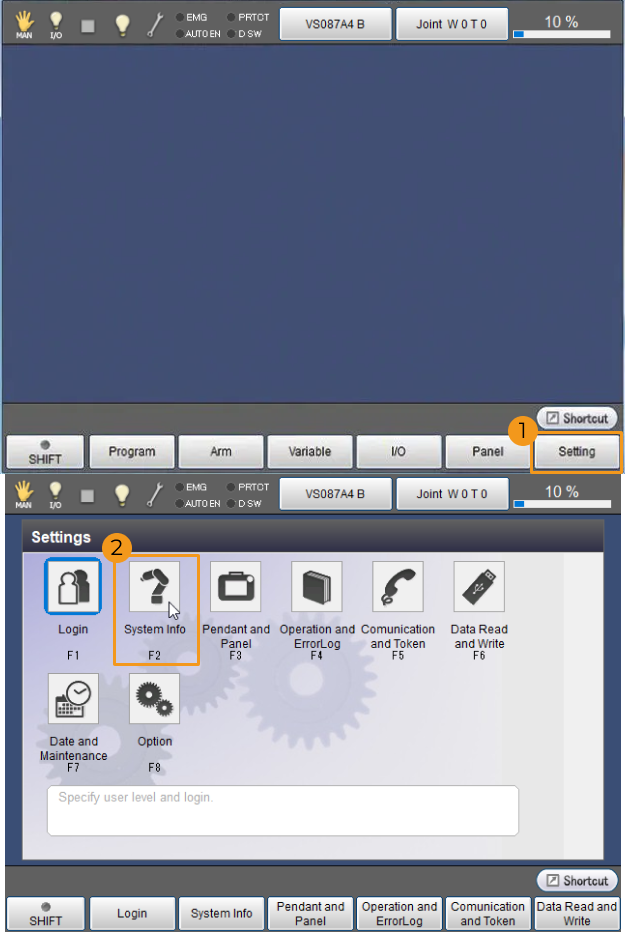
Appuyez sur sur le pupitre d’enseignement.
-
Vérifiez Type de contrôleur et Logiciel du contrôleur.
-
Configurer la connexion réseau
-
Branchez l’autre extrémité du câble Ethernet de l’IPC au port Ethernet du contrôleur du robot.
-
Assurez-vous que les adresses IP du robot DENSO et de l’IPC sont sur le même sous-réseau.
Cliquez ici pour les instructions
-
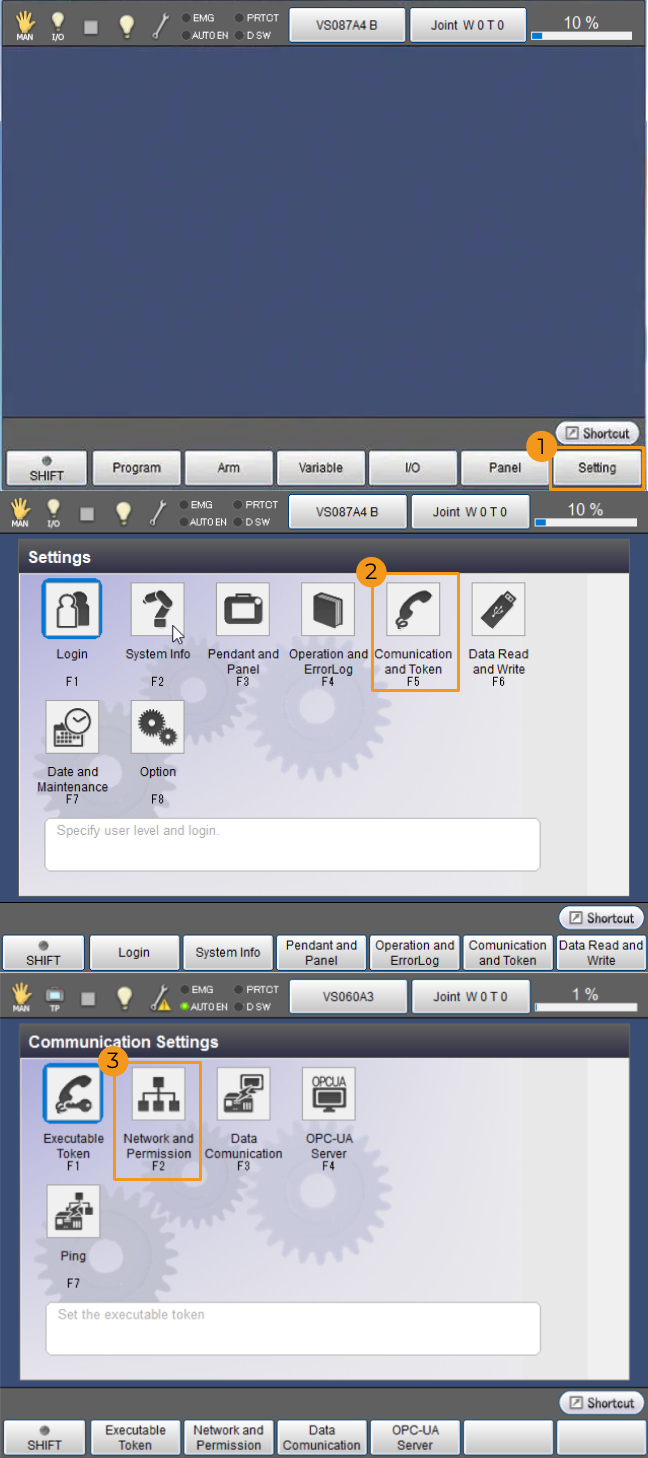
Sur le pupitre d’enseignement, appuyez sur .
-
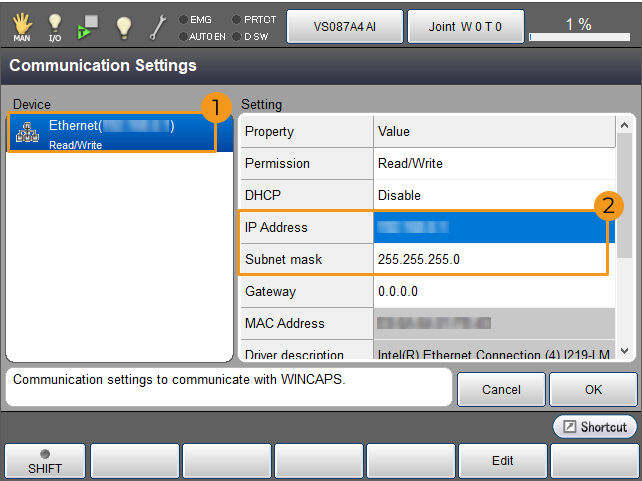
Dans la fenêtre « Paramètres de communication », sélectionnez Ethernet dans la zone « Périphérique », et consultez Adresse IP et Masque de sous-réseau dans la zone « Paramètres ». Vérifiez si l’adresse IP du robot est dans le même sous-réseau que celle de l’IPC.
-
Si l’adresse IP du robot et celle de l’IPC sont dans des sous-réseaux différents, modifiez l’adresse IP de l’IPC.
-
Saisir l’adresse IP de l’IPC
-
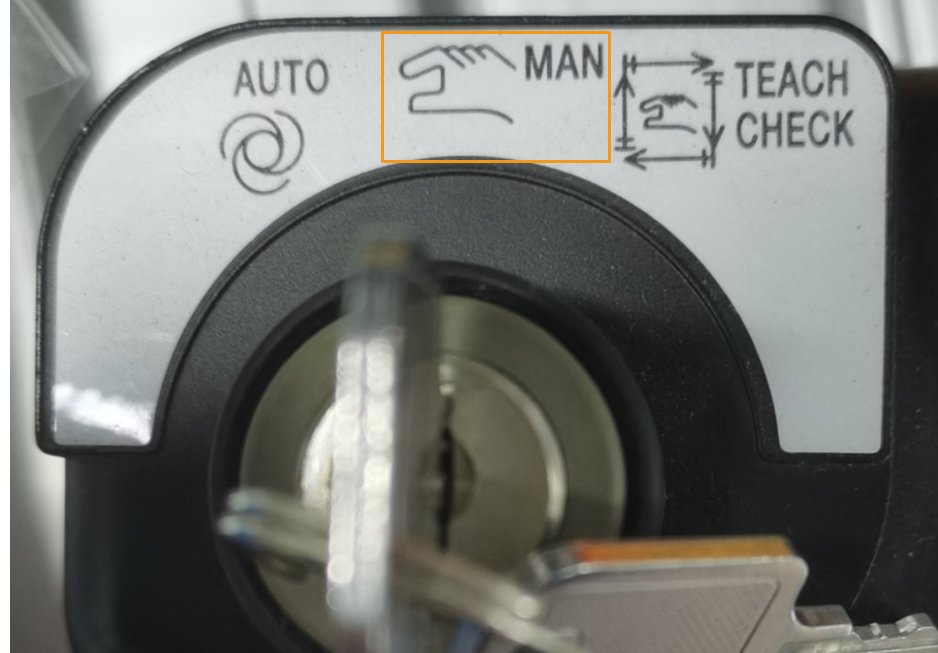
Tournez la clé du pupitre d’enseignement sur MAN (mode manuel).
-
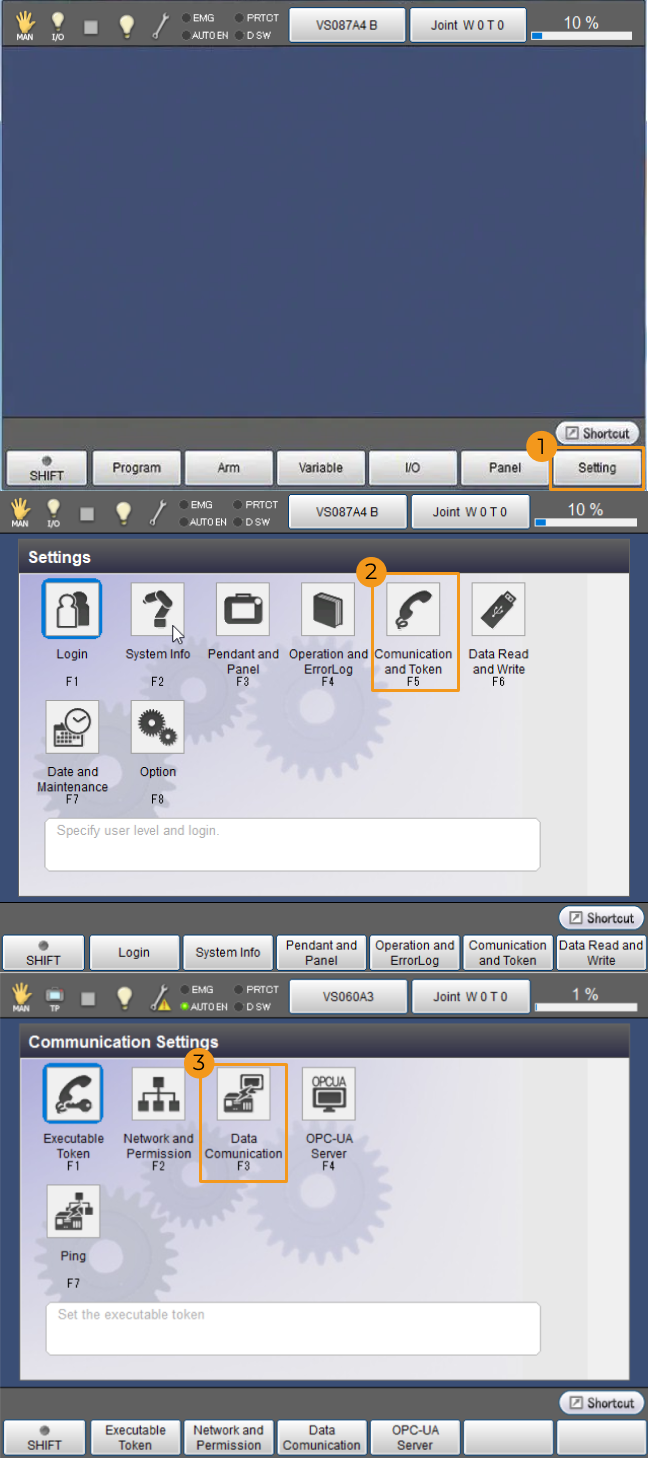
Sur le pupitre d’enseignement, appuyez sur .
-
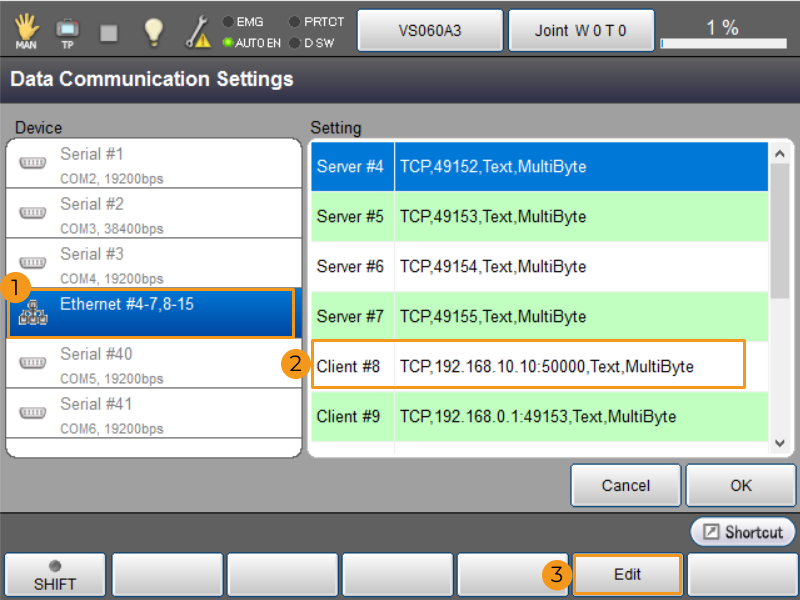
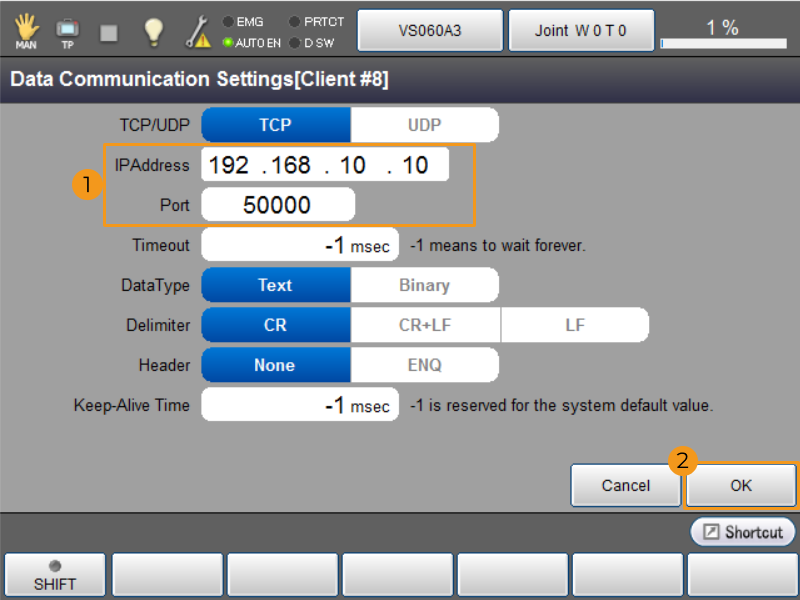
Dans la fenêtre « Paramètres de communication des données », sélectionnez « Ethernet #4-7,8-15 » dans le panneau « Périphérique », et sélectionnez « Client #8 » dans le panneau « Paramètres ». Appuyez sur Modifier.
-
Dans la fenêtre contextuelle, définissez Adresse IP sur celle de l’IPC, et définissez Port sur la valeur définie dans la fenêtre « Configuration de communication du robot » de Mech-Vision. Appuyez sur OK.
Sauvegarde
-
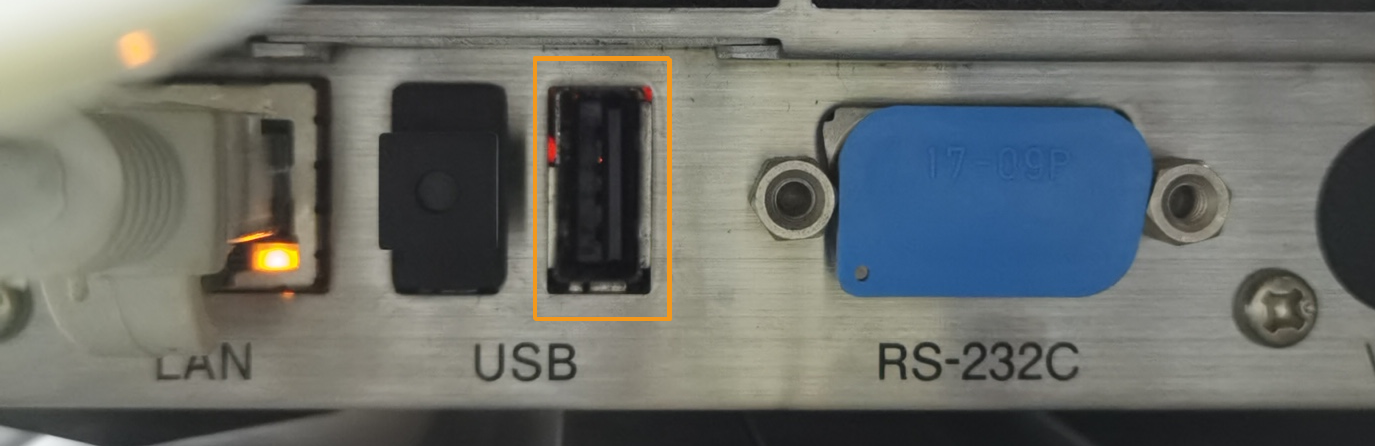
Branchez la clé USB dans le contrôleur du robot.
-
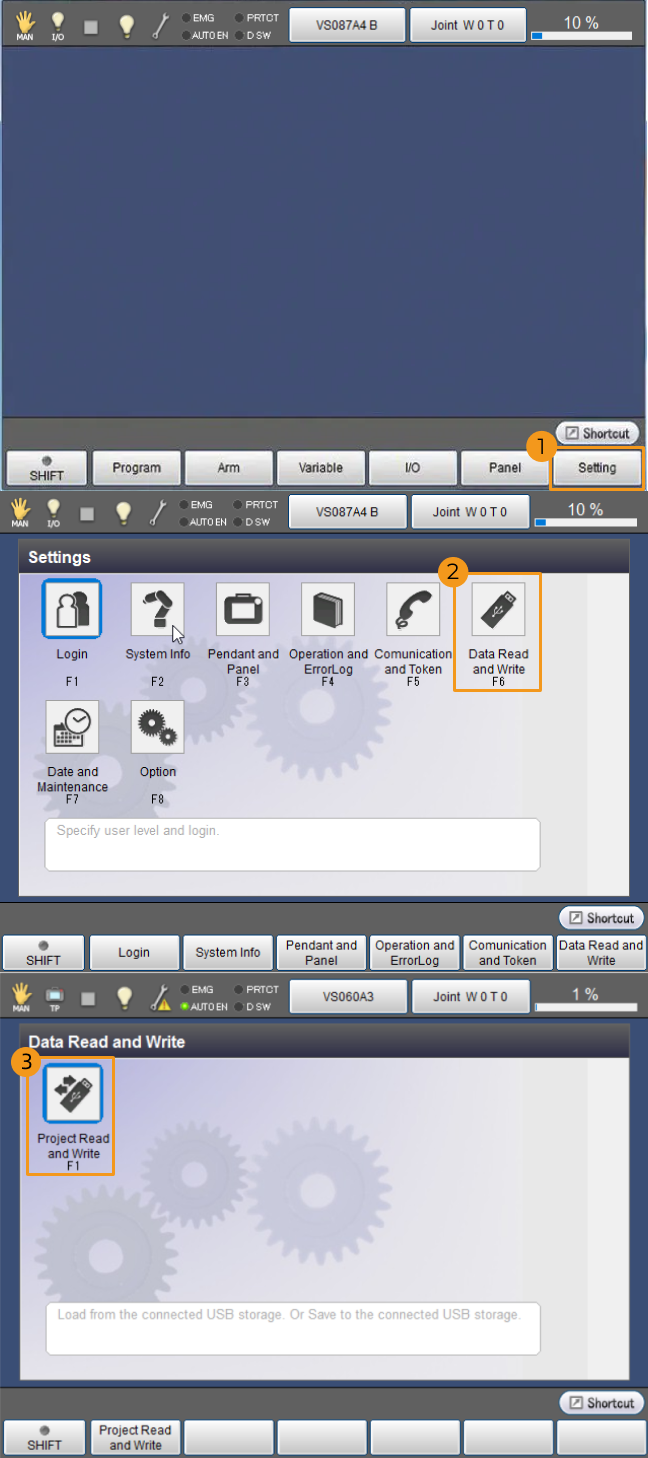
Sur le pupitre d’enseignement, appuyez sur .
-
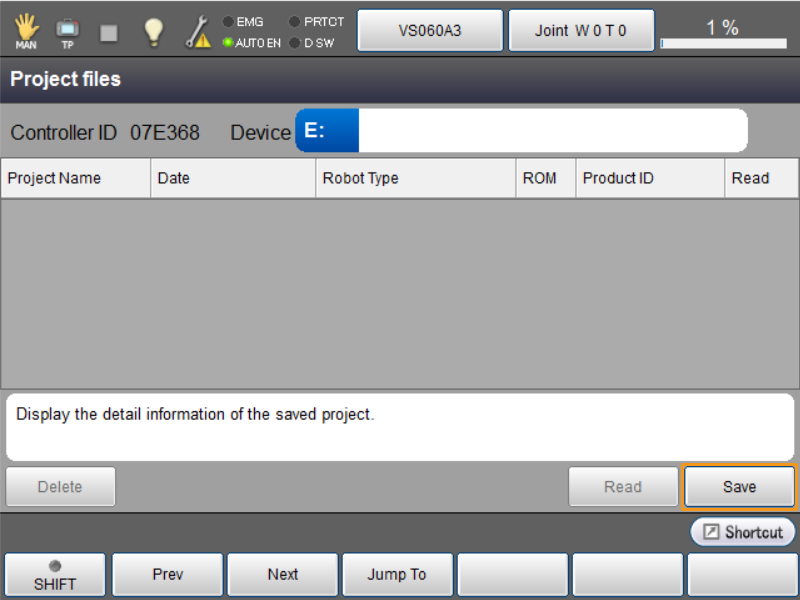
Appuyez sur Enregistrer dans la fenêtre « Fichiers de projet ».
-
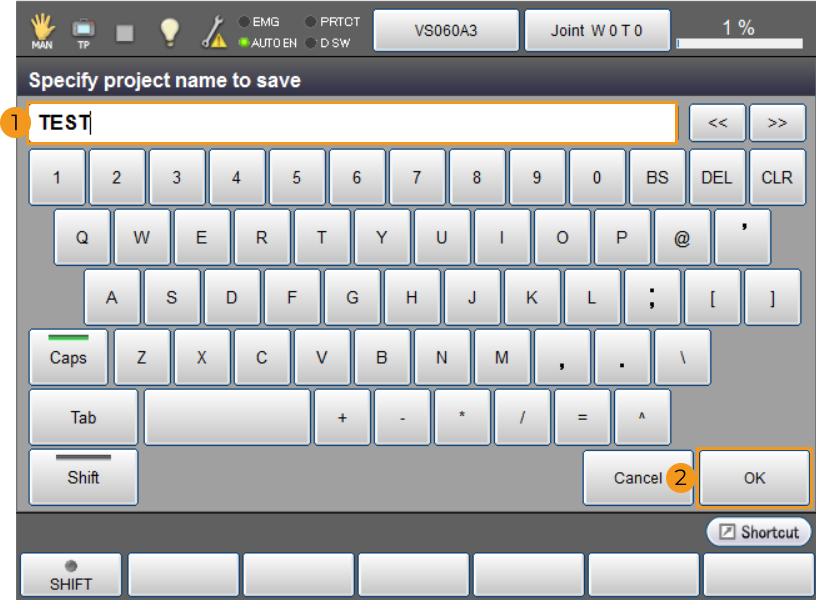
Dans la fenêtre qui affiche « Spécifier le nom du projet à enregistrer », saisissez le nom du dossier de sauvegarde et appuyez sur OK.
-
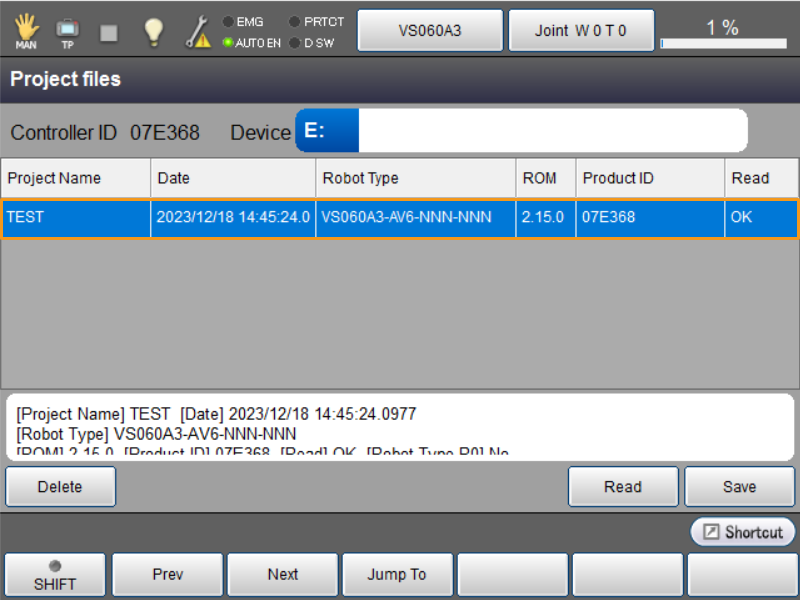
Après la sauvegarde, les informations des fichiers de sauvegarde s’affichent dans la fenêtre « Fichiers de projet ». Nom du projet est le nom du dossier de sauvegarde que vous avez saisi à l’étape précédente. Ensuite, débranchez la clé USB.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
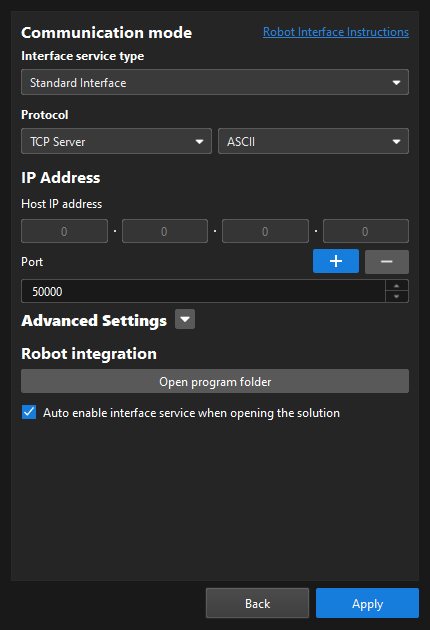
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Préparer les fichiers du programme
-
Branchez la clé USB dans l’IPC. Dans le dossier de programme ouvert (le dossier
DENSO), copiez les fichiers suivants.Vous pouvez également trouver le dossier de programme dans le chemin
Communication Component/Robot_Interface/DENSOdu répertoire d’installation de Mech-Vision et Mech-Viz.-
MM.h
-
MM_Auto_Calib.pcs
-
MM_Module.pcs
-
sample.pcs
-
-
Ouvrez la clé USB et trouvez le dossier Source Files dans le dossier de sauvegarde du robot. Collez les fichiers du programme dans ce dossier. Ensuite, débranchez la clé USB.
Charger les fichiers du programme sur le robot
-
Branchez la clé USB dans le contrôleur du robot.
-
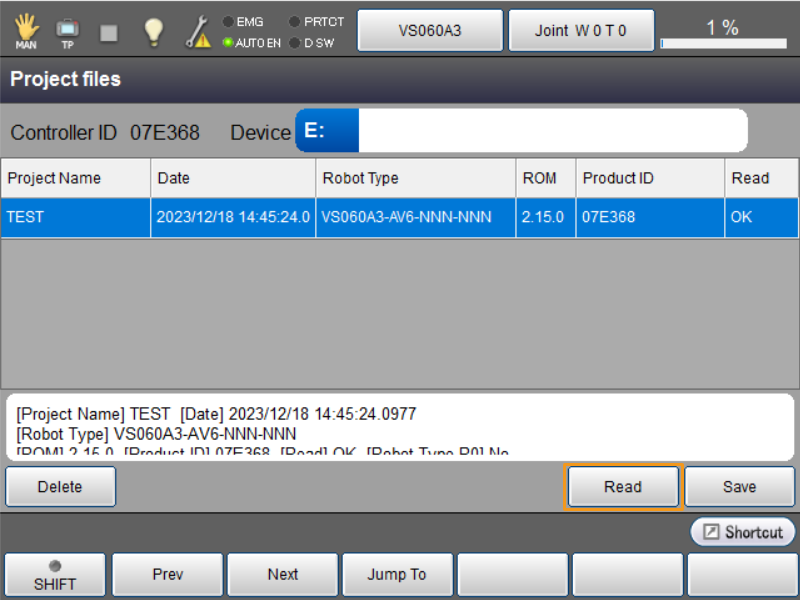
Dans la fenêtre « Fichiers de projet » du pupitre d’enseignement, appuyez sur Lire.
-
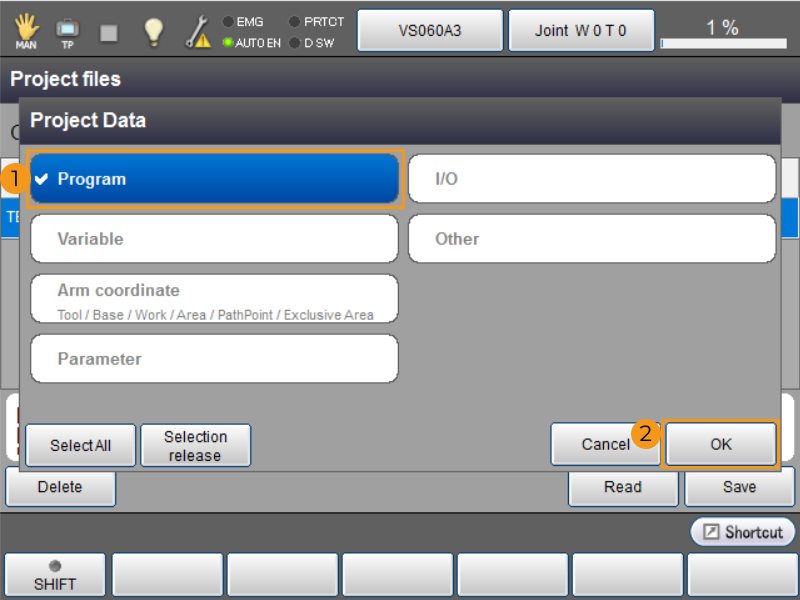
Dans la fenêtre contextuelle « Données de projet », sélectionnez Programme, puis appuyez sur OK.
-
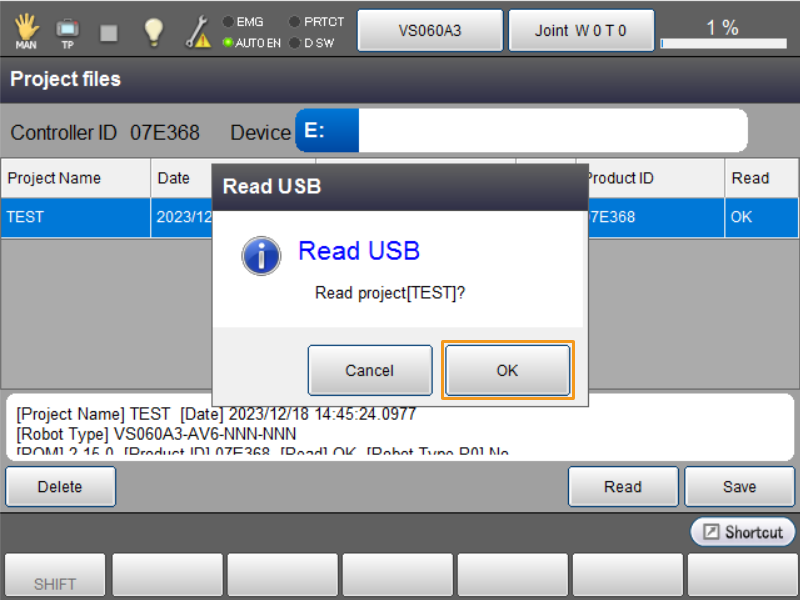
Dans la boîte de dialogue contextuelle « Lecture USB », appuyez sur OK.
-
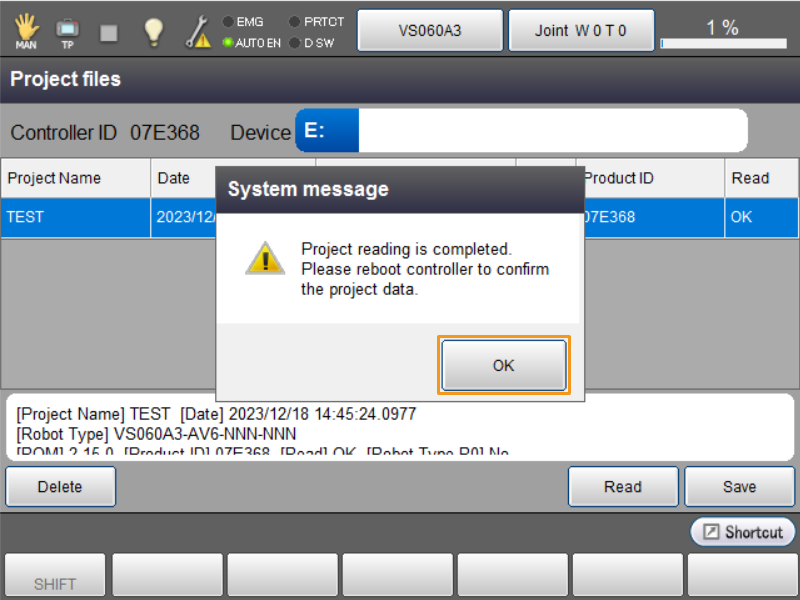
Patientez un instant. La boîte de dialogue « Message système » apparaîtra après que le système aura terminé la lecture. Appuyez sur OK.
Tester la communication d’interface standard
Avant de tester la communication d’interface standard entre le robot et le système de vision, assurez-vous que le service d’interface est démarré. Ensuite, exécutez un programme de test sur le pupitre d’enseignement pour tester la communication d’interface standard.
-
Tournez la clé du pupitre d’enseignement sur AUTO (mode automatique).

-
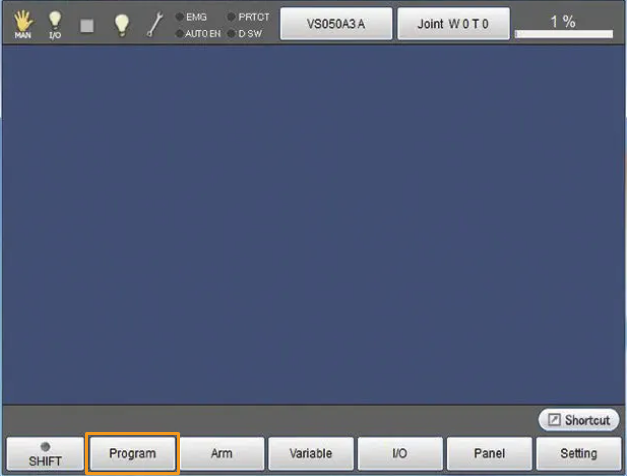
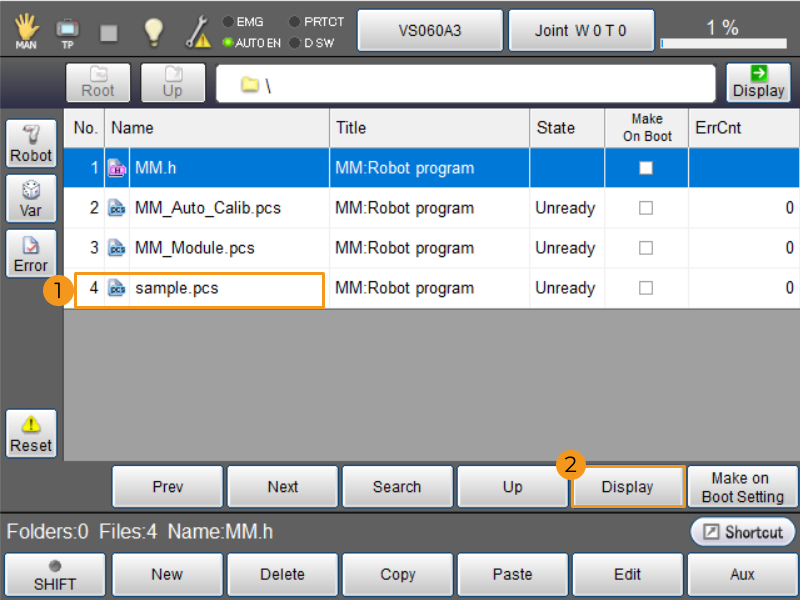
Appuyez sur Programme sur l’interface principale du pupitre d’enseignement.
-
Sélectionnez sample.pcs dans la liste des programmes. Ensuite, appuyez sur Afficher.
-
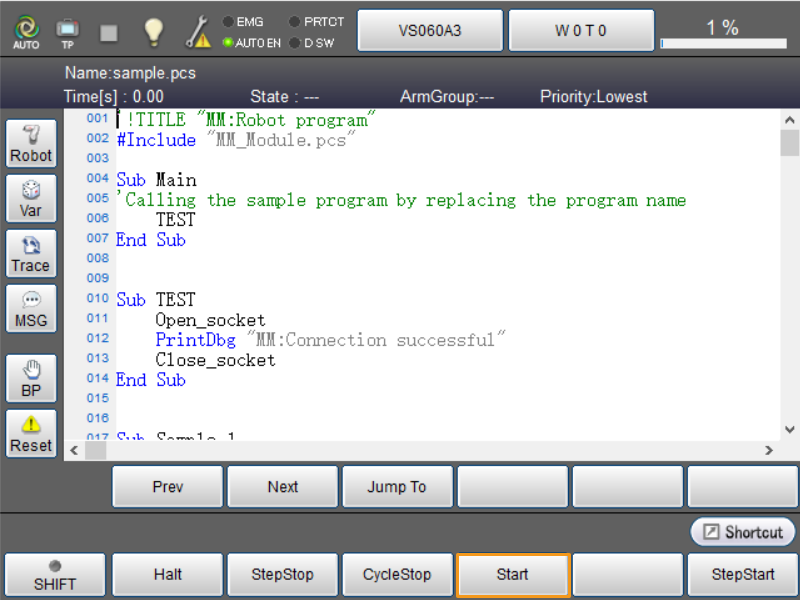
Appuyez sur Démarrer sur l’interface.
-
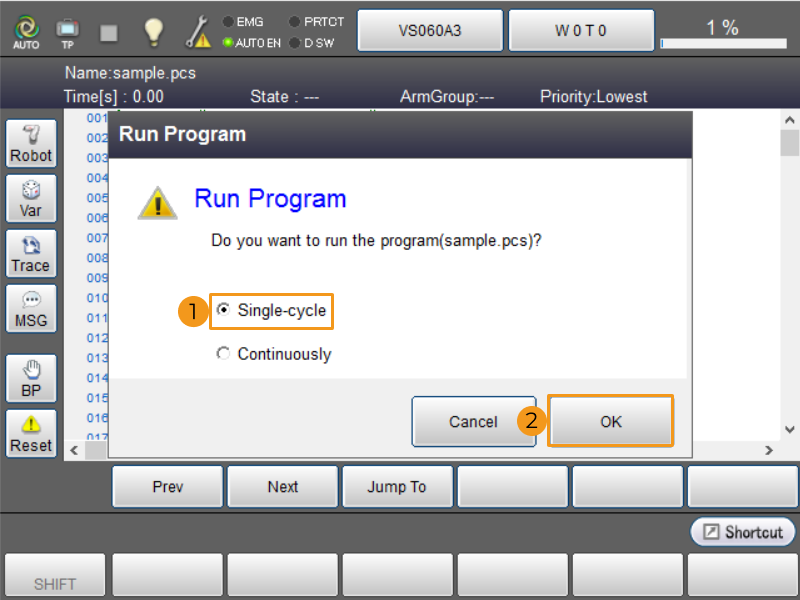
Dans la boîte de dialogue contextuelle « Exécuter le programme », sélectionnez Cycle unique, puis appuyez sur OK.
-
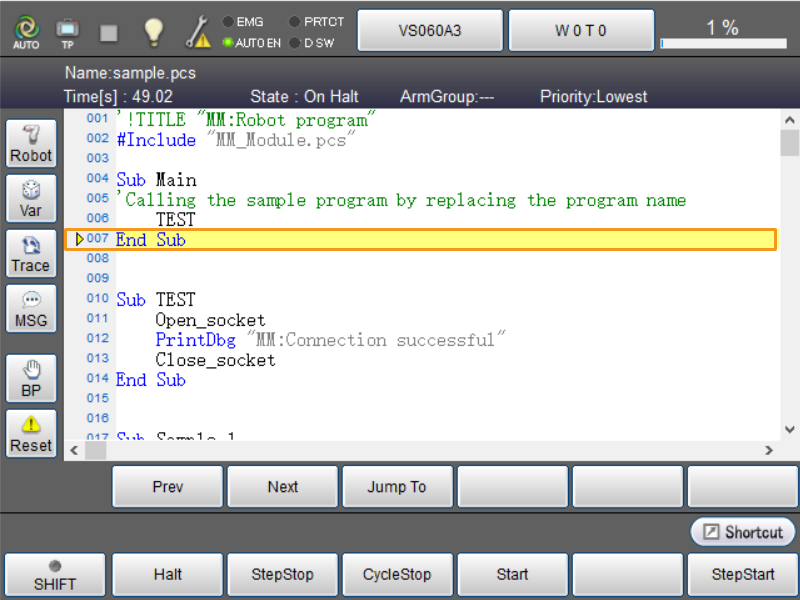
Si la communication d’interface standard entre le robot et Mech-Vision est configurée avec succès, la flèche restera sur la ligne End Sub.
-
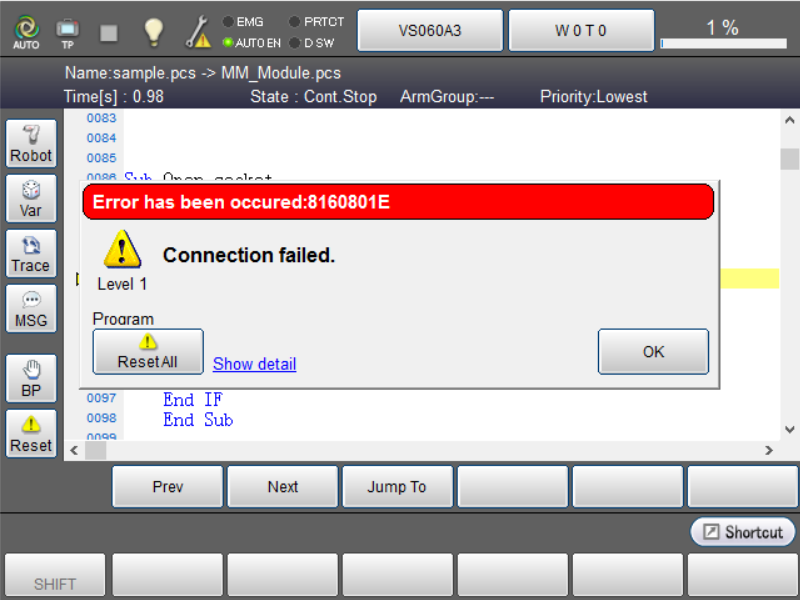
Si la connexion d’interface standard échoue, le message d’erreur Connection failed s’affiche sur le pupitre d’enseignement. Veuillez résoudre les problèmes de communication.