Configuration de la communication et utilisation de l’exemple de programme
Ce sujet présente deux méthodes pour configurer la communication Standard Interface basée sur le protocole EtherNet/IP entre un PLC Beckhoff et le système de vision Mech-Mind.
-
Utiliser une carte PCI‑e.
-
Configurer le logiciel. Aucune carte n’est requise.
|
Exigences matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
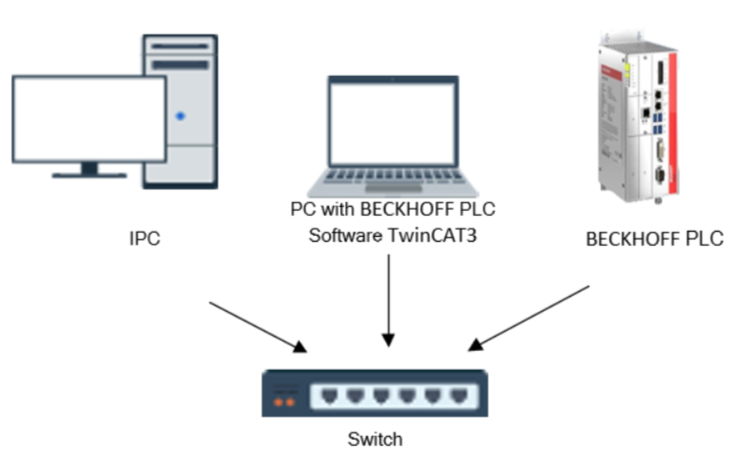
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les paramètres de connexion du matériel.
-
PLC Beckhoff
-
IPC
-
Commutateur réseau et câbles Ethernet
La connexion matérielle est la suivante. Chaque appareil possède une adresse IP unique, mais tous doivent être sur le même sous-réseau et ne pas être utilisés par d’autres appareils. Pour les paramètres d’adresse IP du PLC, reportez-vous à la section ci-dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur sur lequel TwinCAT 3 est installé, voir ce lien.
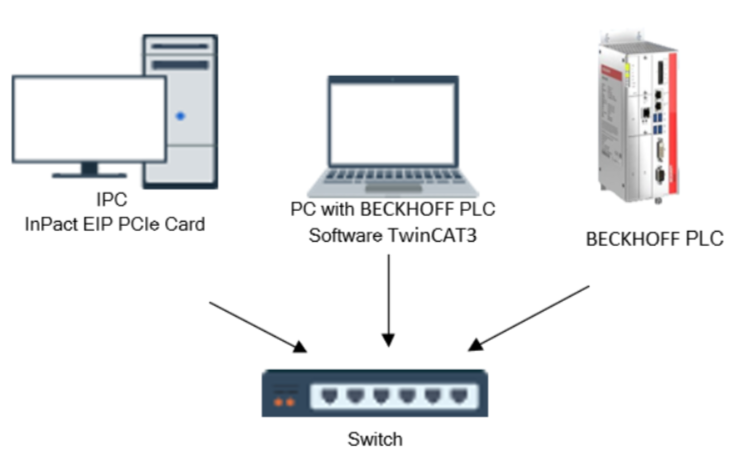
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher le matériel requis et les paramètres de connexion du matériel.
-
PLC Beckhoff
-
IPC équipé d’une carte de communication PCIe standard, HMS IXXAT INpact 40.
-
Commutateur réseau et câbles Ethernet
La connexion matérielle est la suivante. Chaque appareil possède une adresse IP unique, mais tous doivent être sur le même sous-réseau et ne pas être utilisés par d’autres appareils. Pour les paramètres d’adresse IP du PLC et de la carte de communication, reportez-vous à la section ci-dessous. Pour les paramètres d’adresse IP de l’IPC et de l’ordinateur sur lequel TwinCAT 3 est installé, voir ce lien.
Logiciel
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les logiciels requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
TwinCAT 3 |
Logiciel de programmation de PLC Beckhoff |
Ordinateur pour la programmation du PLC Beckhoff |
Mech-Vision & Mech-Viz (2.0.0 ou supérieur) |
Logiciel fournissant le système de vision Mech-Mind |
IPC |
Veuillez copier et coller les fichiers suivants sur un PC avec TwinCAT 3 installé :
-
Fichier Software EIP.eds : utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier Software EIP.eds se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
MM_Camera.tpzip : un fichier d’exemple de programme PLC. Après avoir importé ce fichier dans TwinCAT 3, vous obtiendrez les fichiers d’exemple suivants :
-
CameraSignalsMove : utilisé pour transférer les signaux du système de vision.
-
MM_XXX_XXX FB : utilisé pour implémenter les fonctionnalités de diverses commandes d’interface.
-
fcCameraTestManually : un programme d’exemple (mode manuel).
-
fbCameraTestAuto : un programme d’exemple (mode automatique).
-
fbCameraTestAuto_Notify : le message d’exemple obtenu.
Le fichier MM_Camera.tpzipse trouve dans le dossier suivant du chemin d’installation des logiciels Mech-Vision et Mech-Viz :Communication Component/Robot_Interface/EthernetIP/Programming Samples/BECKHOFF PLC EthernetIP.
-
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les logiciels requis.
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
TwinCAT 3 |
Logiciel de programmation de PLC Beckhoff |
Ordinateur pour la programmation du PLC Beckhoff |
Logiciel pilote de la carte de communication |
IPC |
|
Mech-Vision & Mech-Viz (2.0.0 ou supérieur) |
Logiciel fournissant le système de vision Mech-Mind |
IPC |
Utilisé pour configurer l’adresse IP de la carte PCIe |
IPC |
Veuillez copier et coller les fichiers suivants sur un PC avec TwinCAT 3 installé :
-
Fichier 005A002B003A0100.EDS, utilisé pour fournir les informations d’identité de l’IPC sur le réseau EtherNet/IP.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés. -
MM_Camera.tpzip : un fichier d’exemple de programme PLC. Après avoir importé ce fichier dans TwinCAT 3, vous obtiendrez les fichiers d’exemple suivants :
-
CameraSignalsMove : utilisé pour transférer les signaux du système de vision.
-
MM_XXX_XXX FB : utilisé pour implémenter les fonctionnalités de diverses commandes d’interface.
-
fcCameraTestManually : un programme d’exemple (mode manuel).
-
fbCameraTestAuto : un programme d’exemple (mode automatique).
-
fbCameraTestAuto_Notify : le message d’exemple obtenu.
Le fichier MM_Camera.tpzipse trouve dans le dossier suivant du chemin d’installation des logiciels Mech-Vision et Mech-Viz :Communication Component/Robot_Interface/EthernetIP/Programming Samples/BECKHOFF PLC EthernetIP.
-
Configurer la communication
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Ouvrez Mech-Vision, et vous pouvez arriver sur différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous êtes arrivé sur l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes arrivé sur l’interface principale, cliquez sur dans la barre de menus.

-
Cliquez sur la liste déroulante Sélectionner le robot, puis choisissez soit Robot répertorié soit Robot personnalisé en fonction du robot utilisé dans votre projet. Ensuite, cliquez sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. La convention des angles d’Euler du robot et le système de coordonnées du robot doivent être sélectionnés.
-
-
-
Dans la fenêtre Configuration de la communication du robot, complétez les paramètres suivants.
-
Cliquez sur le menu déroulant Sélectionner le robot, puis sélectionnez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, puis choisissez le modèle de robot que vous utilisez. Ensuite, cliquez sur Suivant.
-
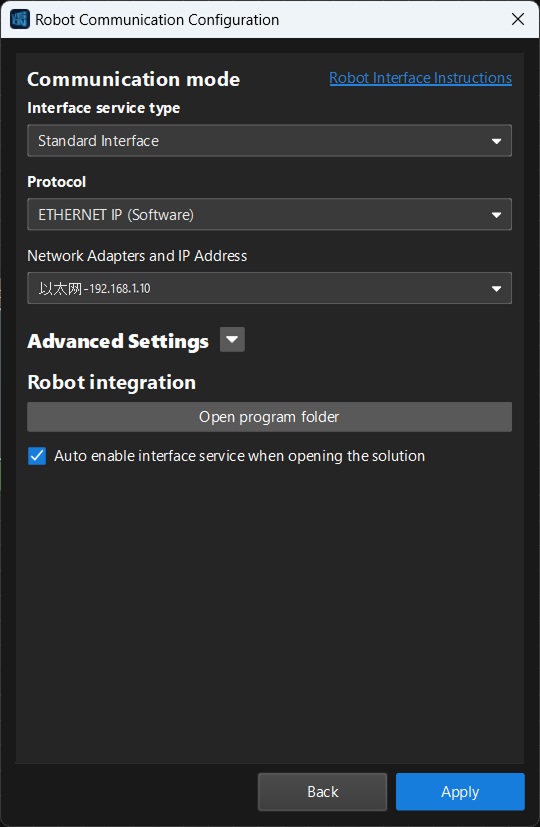
Dans la section Mode de communication, définissez Type de service d’interface sur Interface standard, définissez Protocole sur ETHERNET IP (Software), et définissez Cartes réseau et adresse IP sur la carte réseau et l’adresse IP utilisées par l’IPC.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication du robot dans la barre d’outils est activé et est devenu bleu.

Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
Vérifier la carte PCI‑e et le logiciel du pilote
-
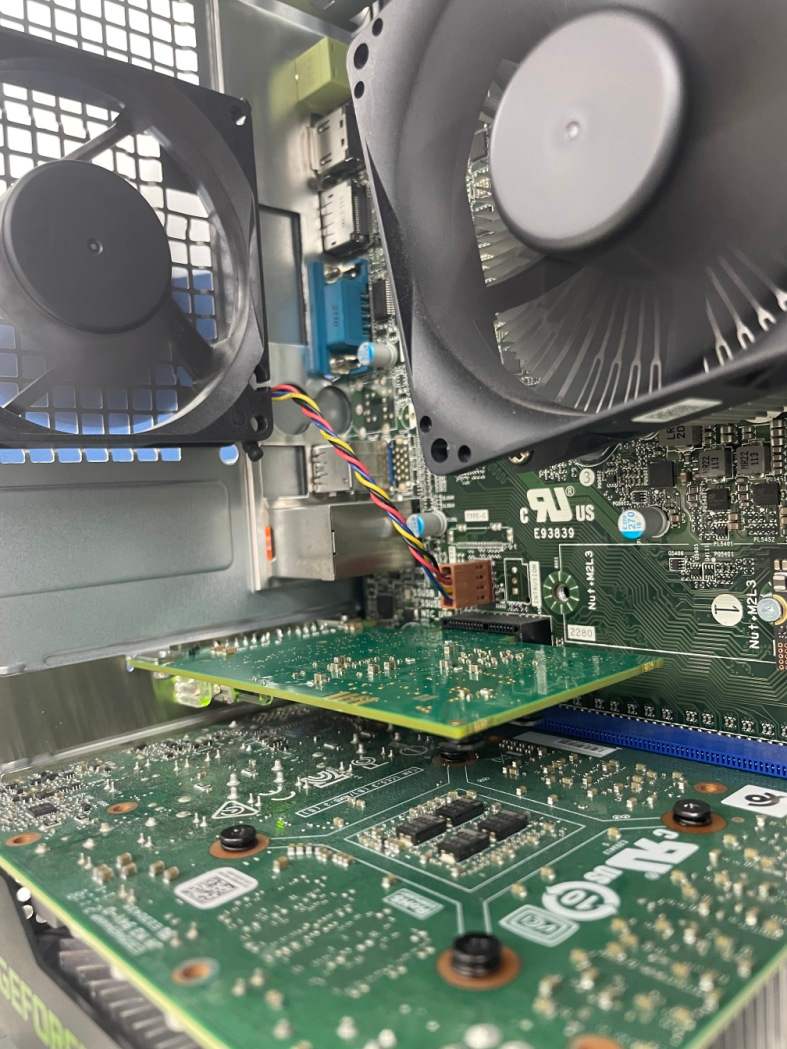
Veuillez vous assurer que la carte d’interface INpact EIP Slave PCIe a été insérée dans le slot PCI‑e de l’IPC, comme illustré ci-dessous.
-
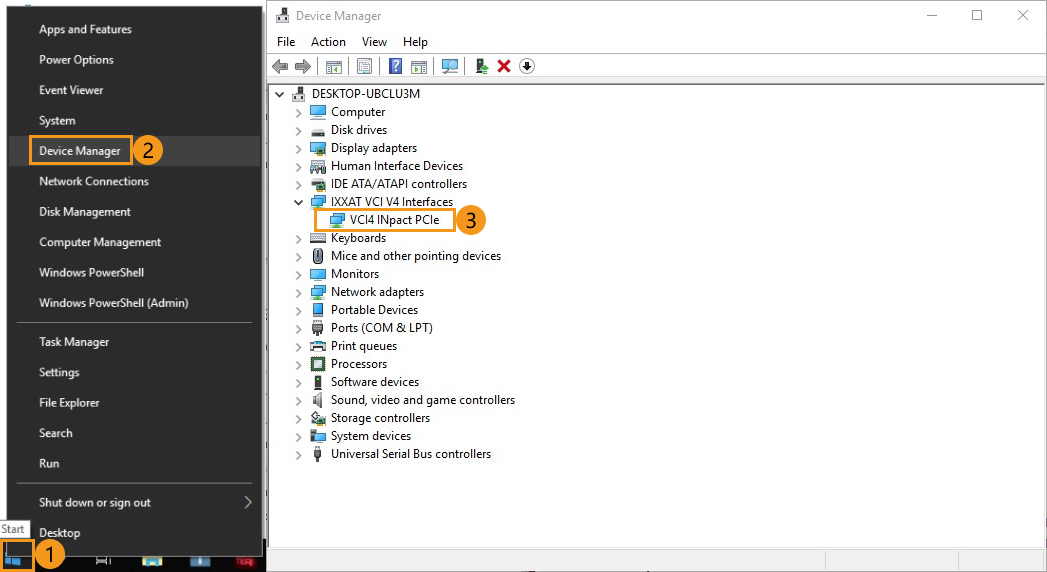
Démarrez l’IPC, allez à Démarrer ‣ Gestionnaire de périphériques et vérifiez si le pilote VCI4 INpact PCIe est installé.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.
-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.
-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
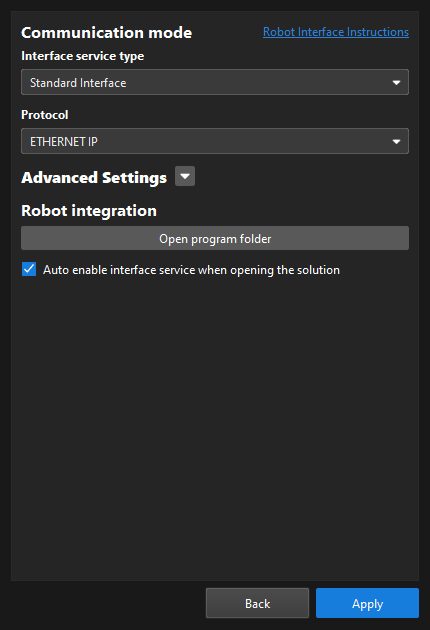
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface et sélectionnez ETHERNET IP pour Protocole.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication robot dans la barre d’outils est basculé et devient bleu.
Configurer l’adresse IP de la carte PCIe
| Assurez-vous que le service d’interface a été activé avant de procéder aux opérations suivantes. |
-
Utilisez un câble Ethernet pour connecter les ports réseau de l’IPC et de la carte INpact EIP Slave PCIe.
Après avoir configuré l’IP et établi la communication avec succès, le câble Ethernet utilisé ici peut être retiré. -
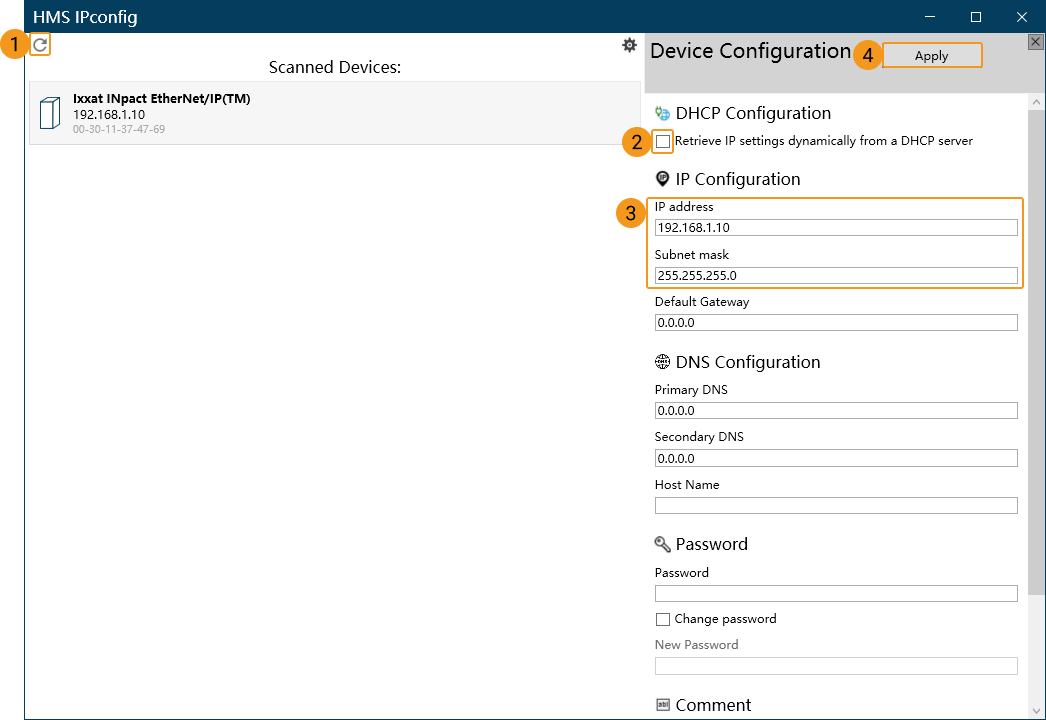
Ouvrez HMS IPconfig, cliquez sur l’icône d’analyse et désélectionnez « Récupérer les paramètres IP dynamiquement à partir d’un serveur DHCP », puis saisissez l’adresse IP et le masque de sous-réseau. Après la configuration, cliquez sur Appliquer et quittez le logiciel.
Créer et configurer le projet PLC
Créer un projet PLC
-
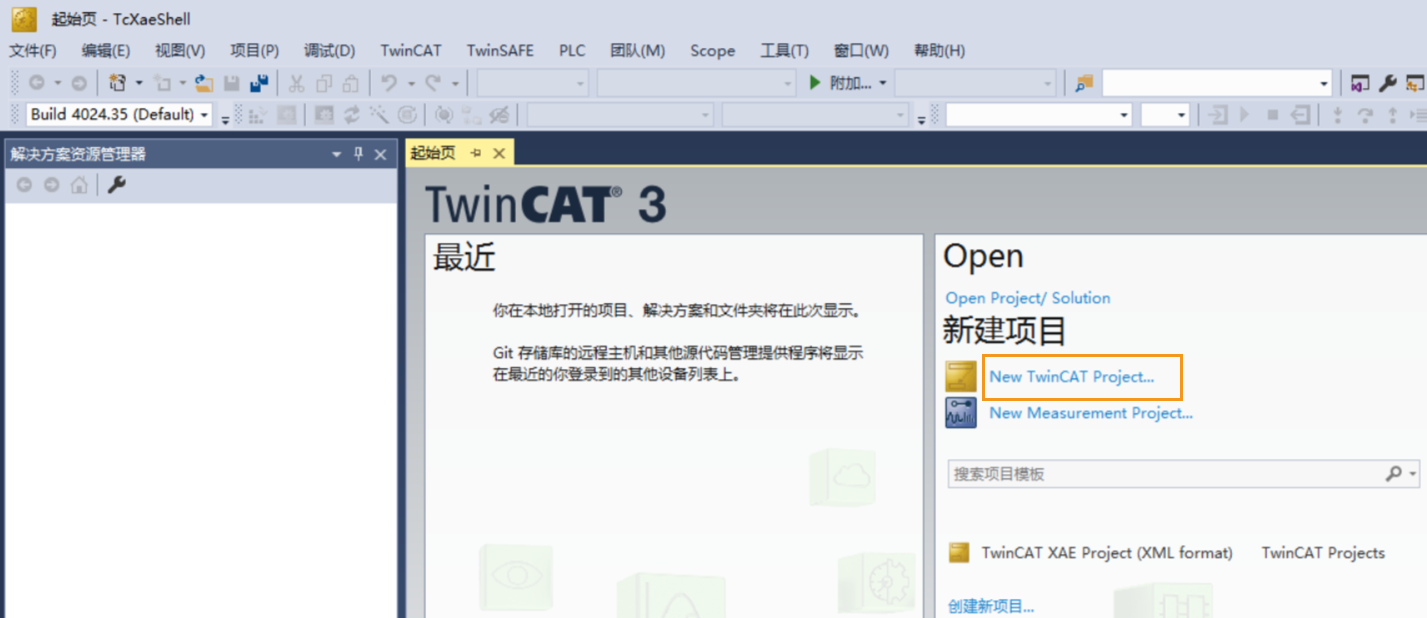
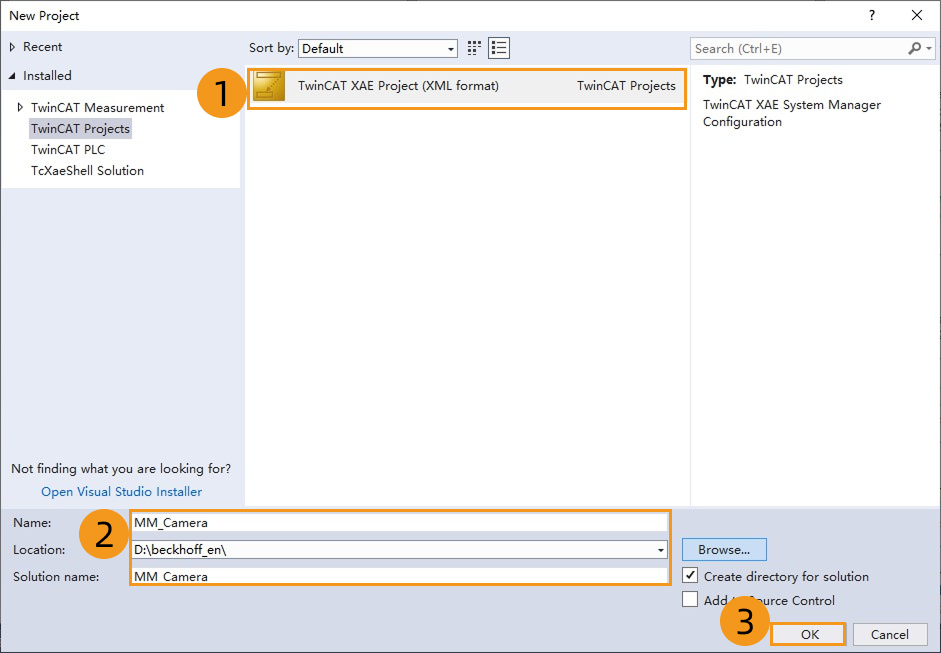
Sur l’ordinateur, ouvrez TwinCAT 3 et cliquez sur New TwinCAT Project. La fenêtre New Project s’affiche.
-
Dans la fenêtre suivante, sélectionnez TwinCAT XAE Project (XML format), saisissez un nom de projet, puis choisissez un emplacement d’enregistrement selon les besoins. Laissez les autres options par défaut et cliquez sur OK.
-
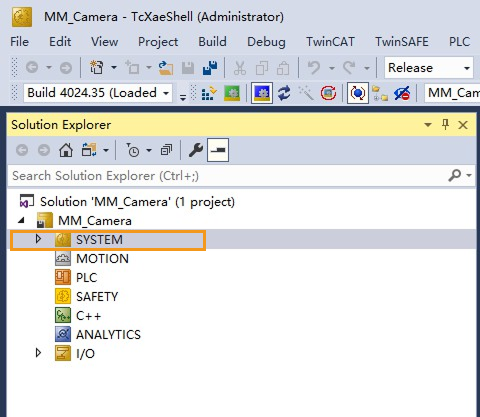
Dans le volet de navigation de gauche, double-cliquez sur SYSTEM.
-
Dans la fenêtre suivante, sélectionnez
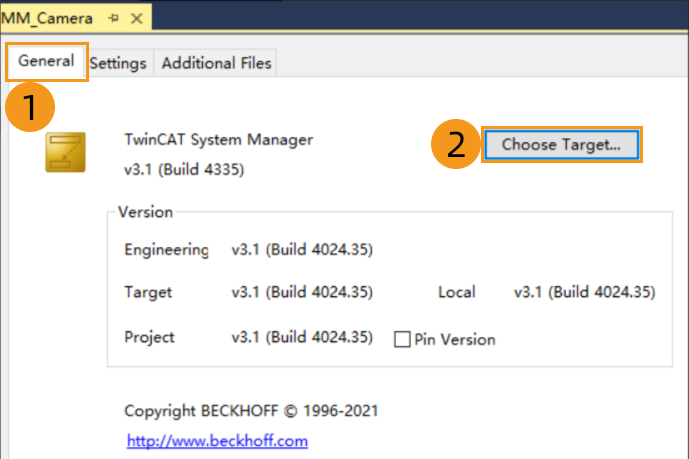
-
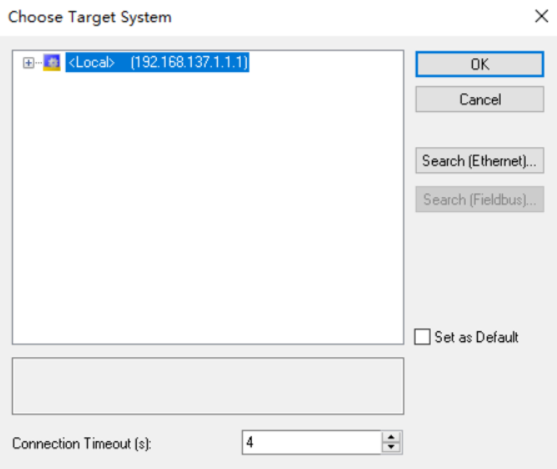
Dans la fenêtre suivante, sélectionnez le contrôleur auquel vous souhaitez vous connecter et cliquez sur OK.
-
<Local> indique une connexion au contrôleur virtuel local. Dans cet exemple, <Local> est sélectionné.
-
Pour se connecter à un autre contrôleur, cliquez sur Rechercher (Ethernet)…. Pour des instructions détaillées, voir Connexion à un contrôleur.
-
Ajouter le composant TF6281 (EtherNet/IP Scanner)
-
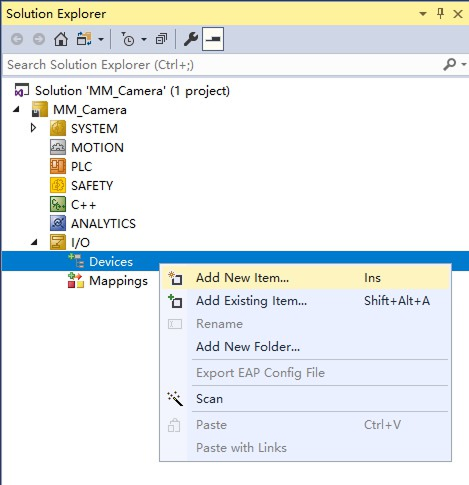
Dans le volet de navigation de gauche, double-cliquez sur I/O, faites un clic droit sur Devices, puis sélectionnez Add New Item.
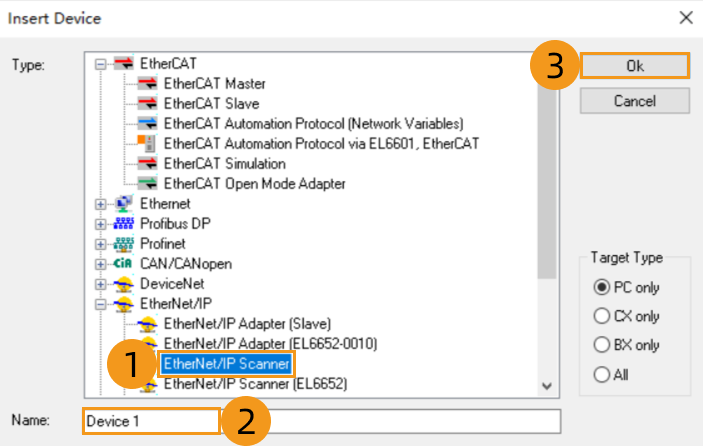
Dans la fenêtre qui s’affiche, définissez Type sur EtherNet/IP Scanner, laissez Name sur la valeur par défaut Device 1, puis cliquez sur OK.
-
Dans la fenêtre suivante, cliquez sur Settings, développez F800:0, double-cliquez sur F800:21, modifiez l’adresse IP, puis cliquez sur OK.
L’adresse IP définie ici doit être sur le même sous-réseau que l’IPC. 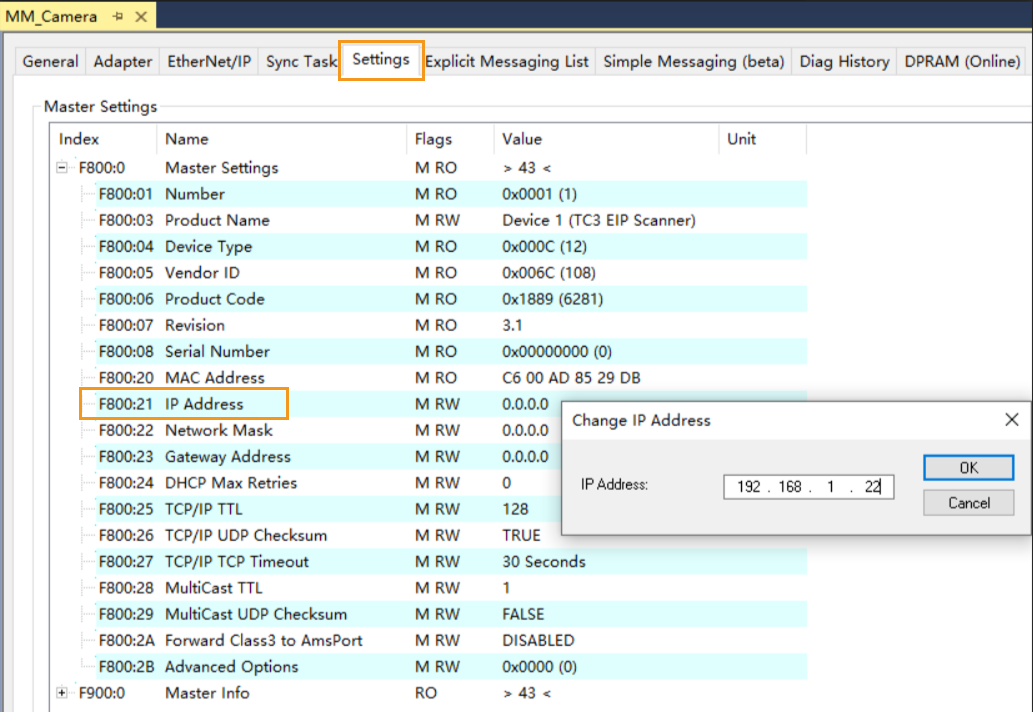
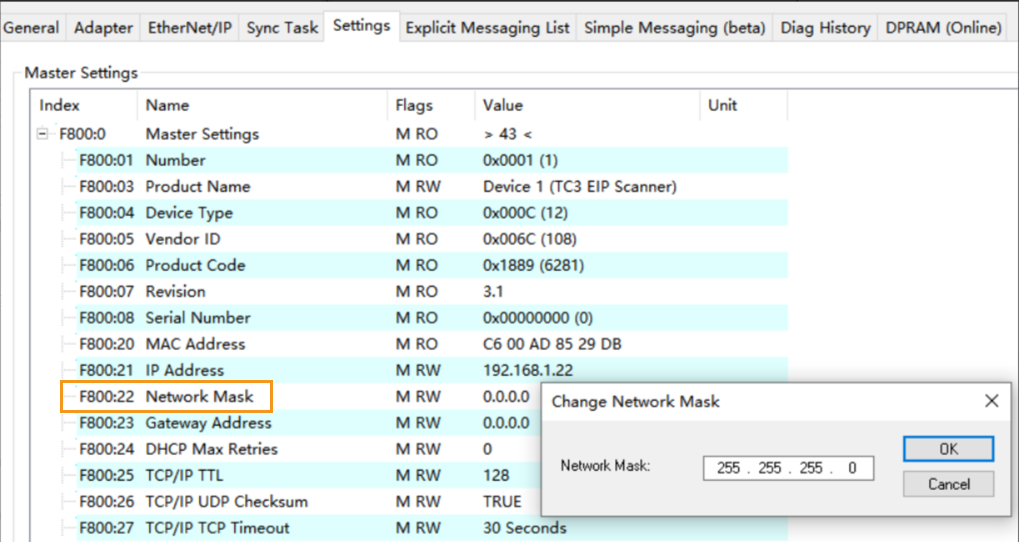
Double-cliquez sur F800:22, modifiez le masque de sous-réseau, puis cliquez sur OK.
Installer le fichier EDS et configurer la communication
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Dans le volet de navigation de gauche, cliquez avec le bouton droit sur Device 1 (TC3 EIP Scanner) et sélectionnez Import EDS File.
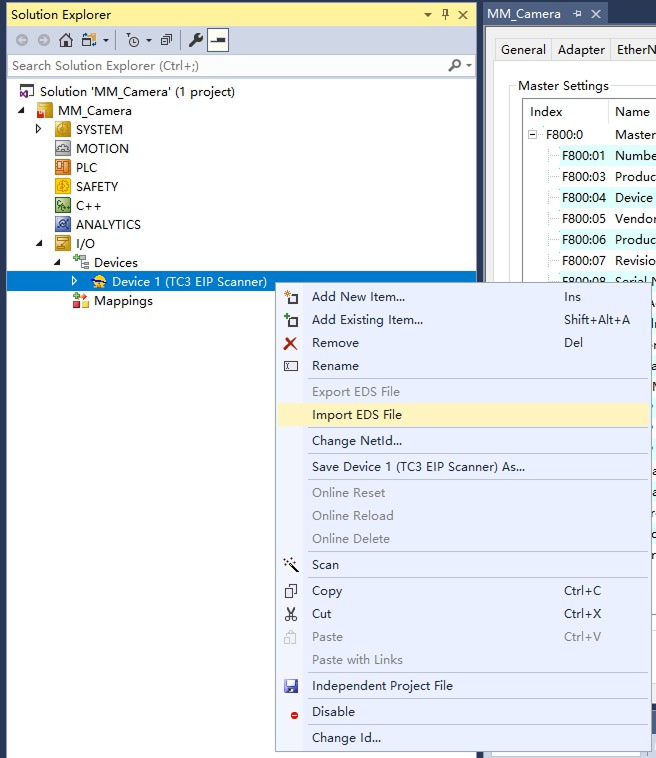
Dans la fenêtre qui s’affiche, sélectionnez le fichier Software EIP.eds (qui doit avoir été copié depuis l’IPC au préalable) et cliquez sur Ouvrir.
Le fichier Software EIP.eds se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.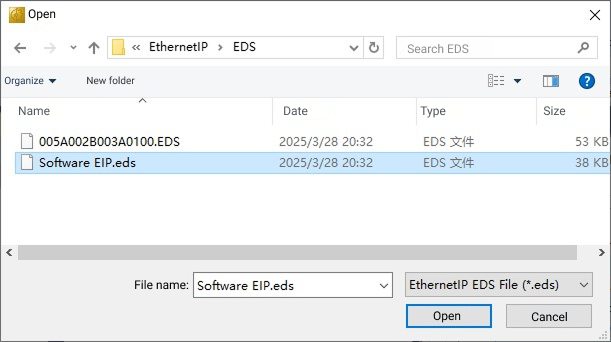
Dans la fenêtre qui s’affiche, cliquez sur OK.
-
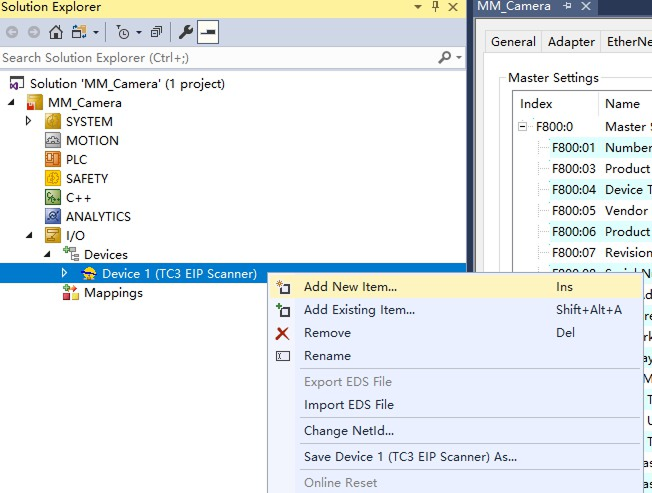
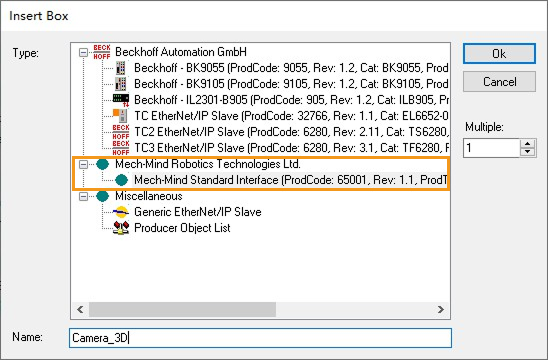
Après l’installation du fichier EDS, cliquez avec le bouton droit sur Device 1 (TC3 EIP Scanner) et sélectionnez Add New Item.
La fenêtre suivante s’affiche. Développez Mech-Mind Robotics Technologies Ltd. et sélectionnez Mech-Mind Standard Interface, saisissez un nom (vous pouvez spécifier un nom personnalisé, par ex., Camera_3D), puis cliquez sur OK.
-
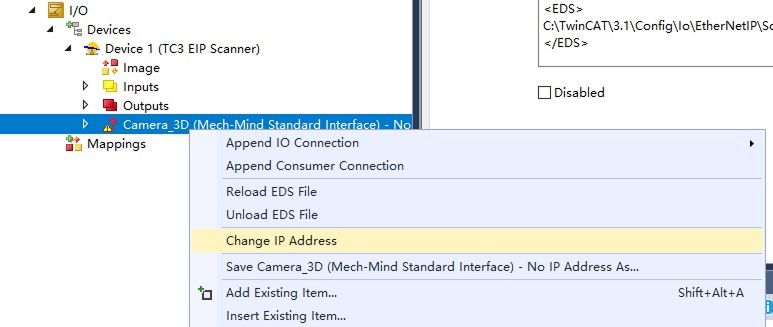
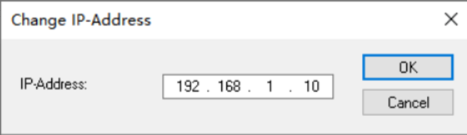
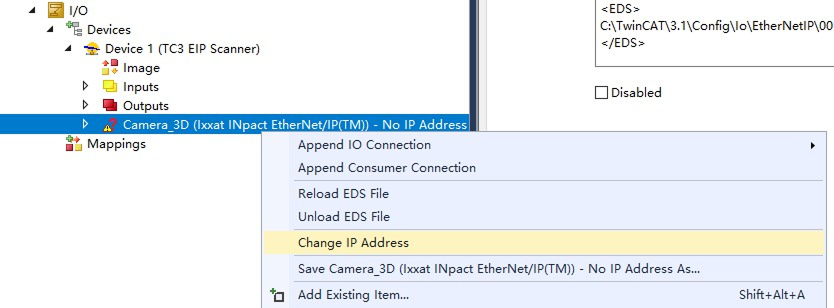
Cliquez avec le bouton droit sur l’élément nouvellement ajouté (par ex., Camera_3D) et sélectionnez Change IP Address.
Dans la fenêtre qui s’affiche, modifiez l’adresse IP puis cliquez sur OK.
L’adresse IP ici doit être cohérente avec l’adresse IP sélectionnée sous*Network Adapters and IP Address* dans les paramètres de configuration de la communication du robot dans Mech-Vision.
-
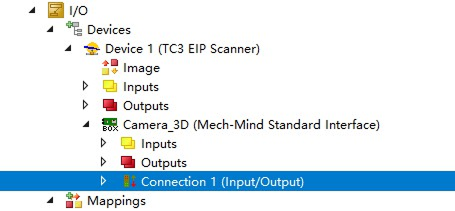
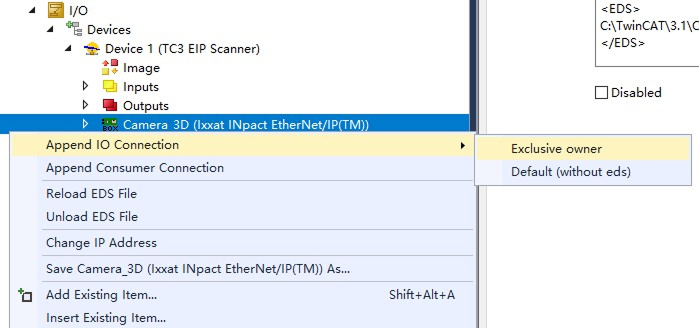
Cliquez à nouveau avec le bouton droit sur l’élément nouvellement ajouté (par ex., Camera_3D), puis sélectionnez .
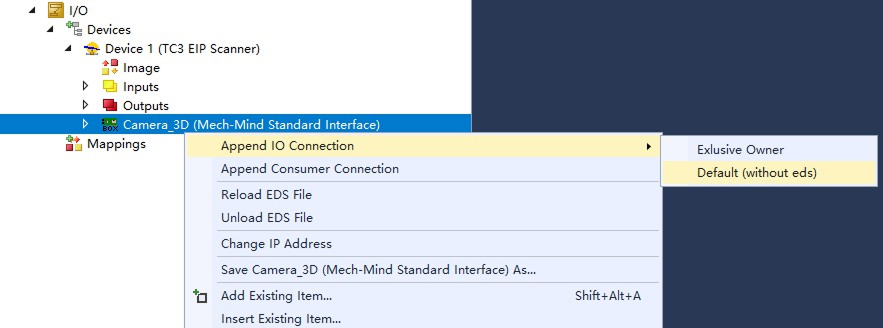
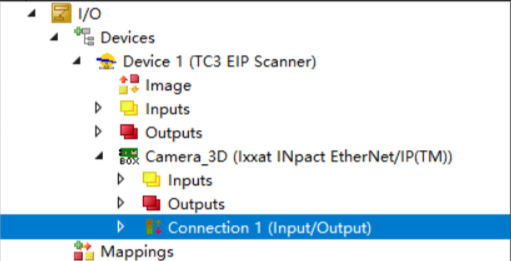
Une variable de connexion, Connection 1 (Input/Output), est créée, comme illustré ci-dessous.
-
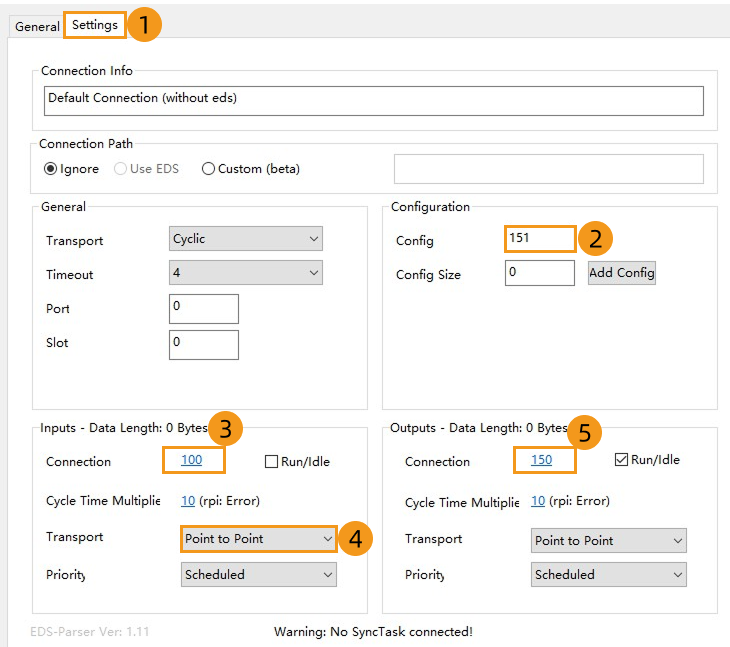
Double-cliquez sur Connection 1 (Input/Output).
Dans la fenêtre contextuelle, allez à l’onglet Settings, définissez les paramètres comme illustré, puis fermez la fenêtre.
-
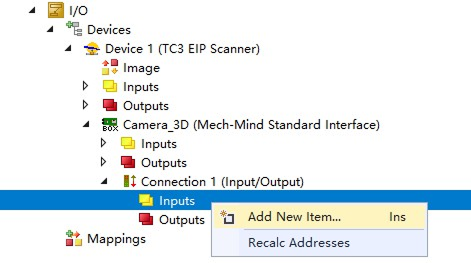
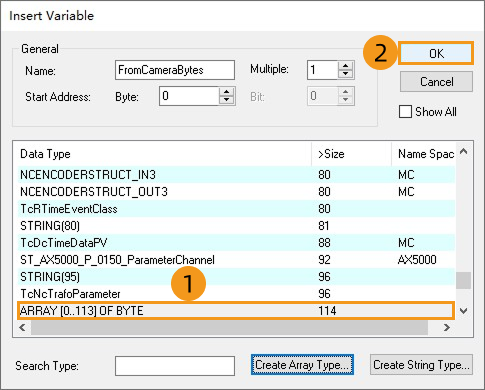
Développez Connection 1 (Input/Output), cliquez avec le bouton droit sur Inputs, puis sélectionnez Add New Item.
Dans la fenêtre contextuelle, sélectionnez BYTE et cliquez sur Créer un type de tableau.
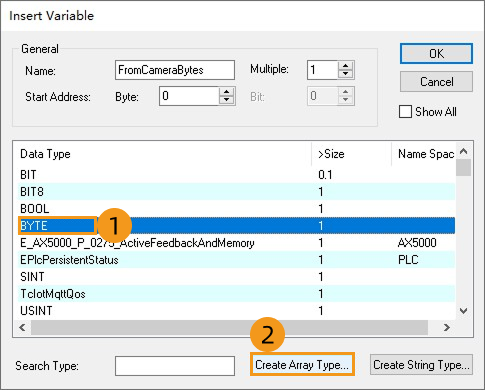
Dans la fenêtre contextuelle suivante, définissez l’index du tableau de 0 à 113 et cliquez sur OK.
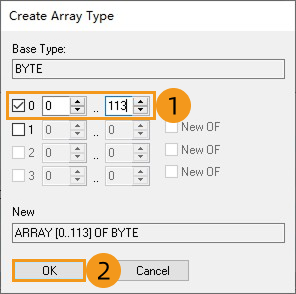
Le tableau créé s’affichera dans la fenêtre suivante ; cliquez sur OK pour confirmer.
-
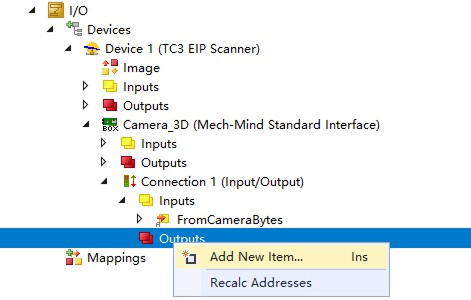
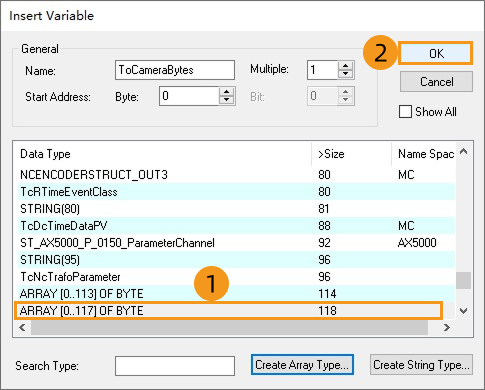
Dans la fenêtre suivante, cliquez avec le bouton droit sur Outputs et sélectionnez Add New Item.
Dans la fenêtre contextuelle, sélectionnez BYTE et cliquez sur Créer un type de tableau.
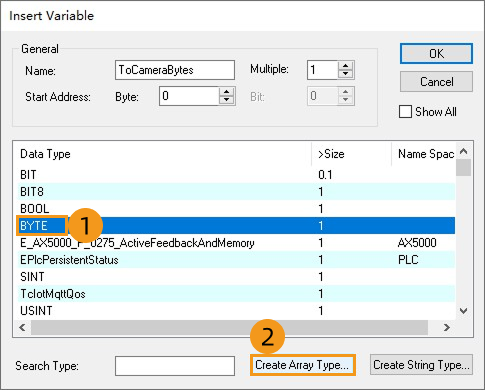
Dans la fenêtre contextuelle suivante, définissez l’index du tableau de 0 à 117 et cliquez sur OK.
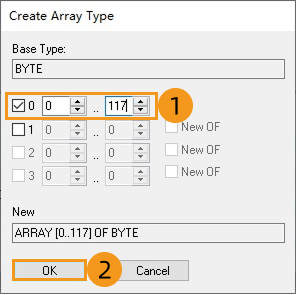
Le tableau créé s’affichera dans la fenêtre suivante ; cliquez sur OK pour confirmer.
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Dans le volet de navigation de gauche, cliquez avec le bouton droit sur Device 1 (TC3 EIP Scanner) et sélectionnez Import EDS File.
Dans la fenêtre qui s’affiche, sélectionnez le fichier 005A002B003A0100.EDS (qui doit avoir été copié depuis l’IPC au préalable) et cliquez sur Ouvrir.
Le fichier 005A002B003A0100.EDS se trouve dans le chemin
Communication Component/Robot_Interface/EthernetIP/EDSdu répertoire où Mech-Vision et Mech-Viz sont installés.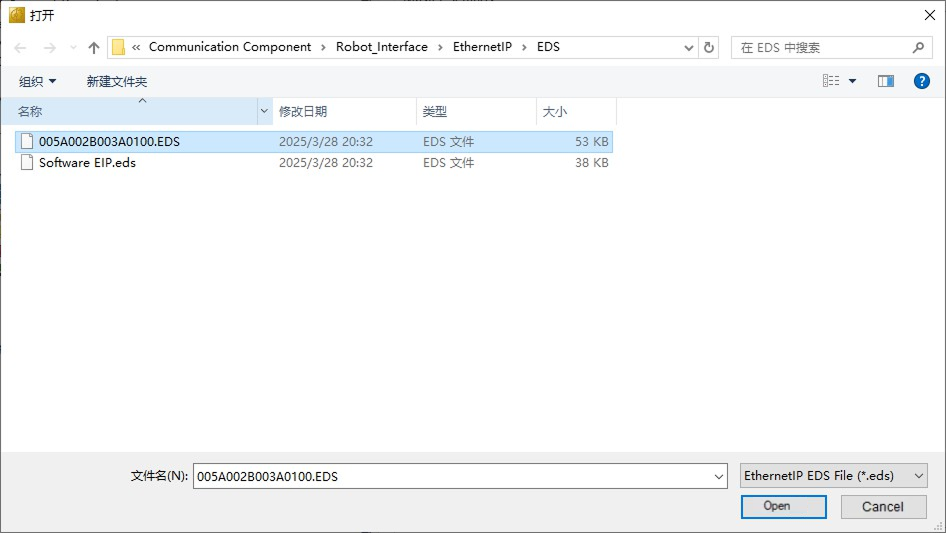
-
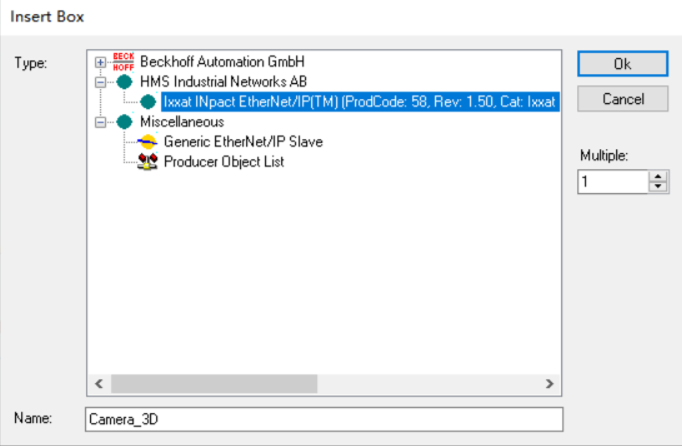
Après l’installation du fichier EDS, cliquez avec le bouton droit sur Device 1 (TC3 EIP Scanner) et sélectionnez Add New Item.
Dans la fenêtre qui s’affiche, développez HMS Industrial Networks AB, sélectionnez Ixxat INpact EtherNet/IP (TM), saisissez un nom (vous pouvez spécifier un nom personnalisé, par ex., Camera_3D), puis cliquez sur OK.
-
Cliquez avec le bouton droit sur l’élément nouvellement ajouté (par ex., Camera_3D) et sélectionnez Change IP Address.
Dans la fenêtre qui s’affiche, modifiez l’adresse IP puis cliquez sur OK.
L’adresse IP ici doit être cohérente avec l’adresse IP définie dans HMS IPconfig.
-
Cliquez à nouveau avec le bouton droit sur l’élément nouvellement ajouté (par ex., Camera_3D), puis sélectionnez .
Cliquez sur Oui dans la fenêtre contextuelle ci-dessous.
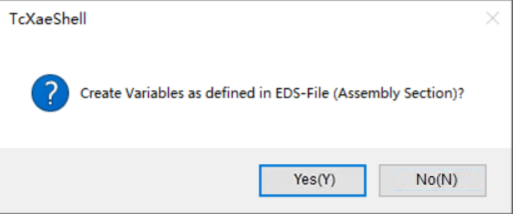
Une variable de connexion, Connection 1 (Input/Output), est créée, comme illustré ci-dessous.
Importer des programmes d’exemple
| Avant d’ajouter le programme d’exemple à un projet déjà utilisé, il est recommandé de l’importer dans un nouveau projet et de le tester d’abord. |
Si vous configurez le logiciel pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Dans le volet de navigation de gauche, cliquez avec le bouton droit sur PLC et sélectionnez Add Existing Item.
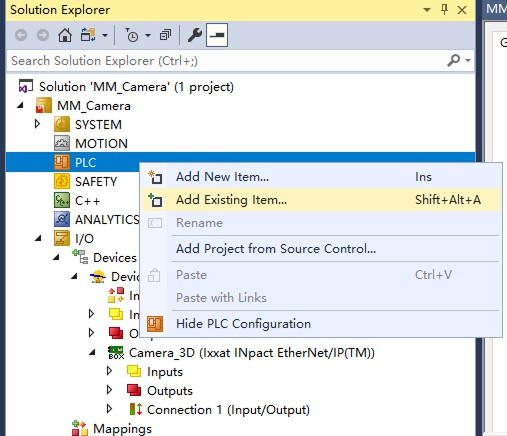
Dans la fenêtre qui s’affiche, sélectionnez le fichier MM_Camera.tpzip (qui doit avoir été copié depuis l’IPC au préalable), et cliquez sur Ouvrir.
Le fichier MM_Camera.tpzip se trouve dans le dossier Communication Component/Robot_Interface/EthernetIP/Programming Samples/BECKHOFF PLC EthernetIPsous le chemin d’installation de Mech-Vision et Mech-Viz.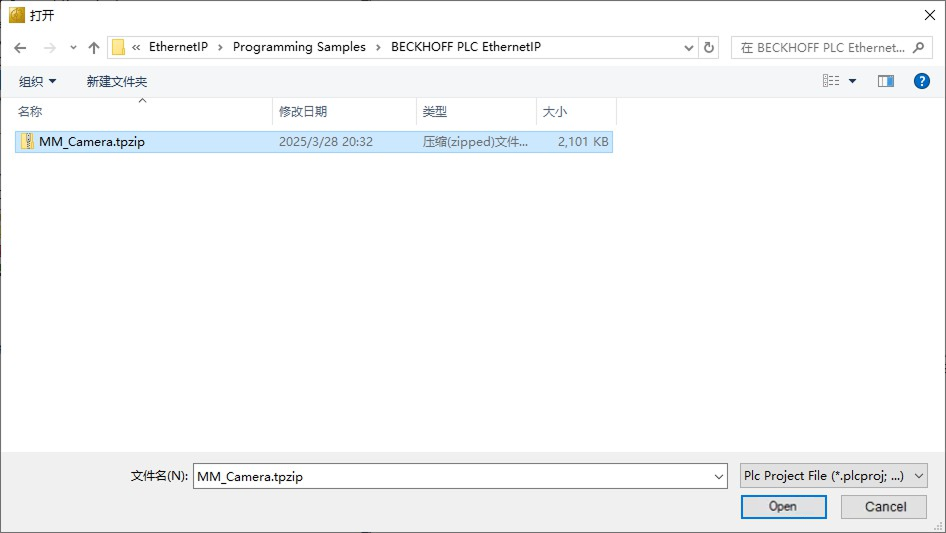
Cliquez sur Oui dans la fenêtre contextuelle comme ci-dessous.
-
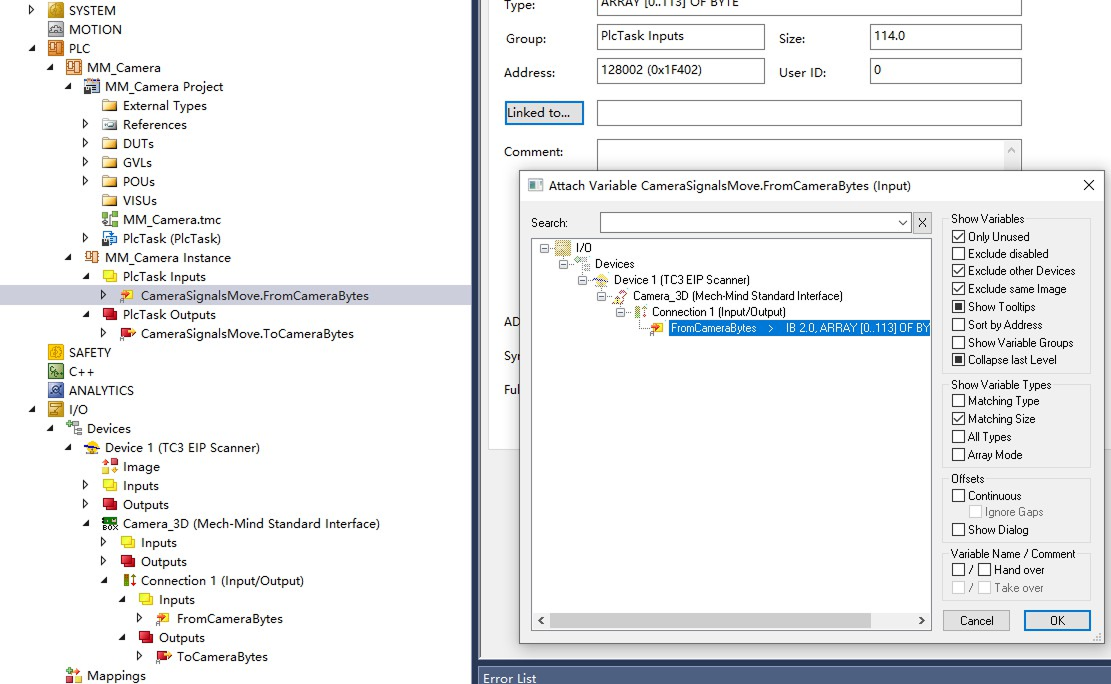
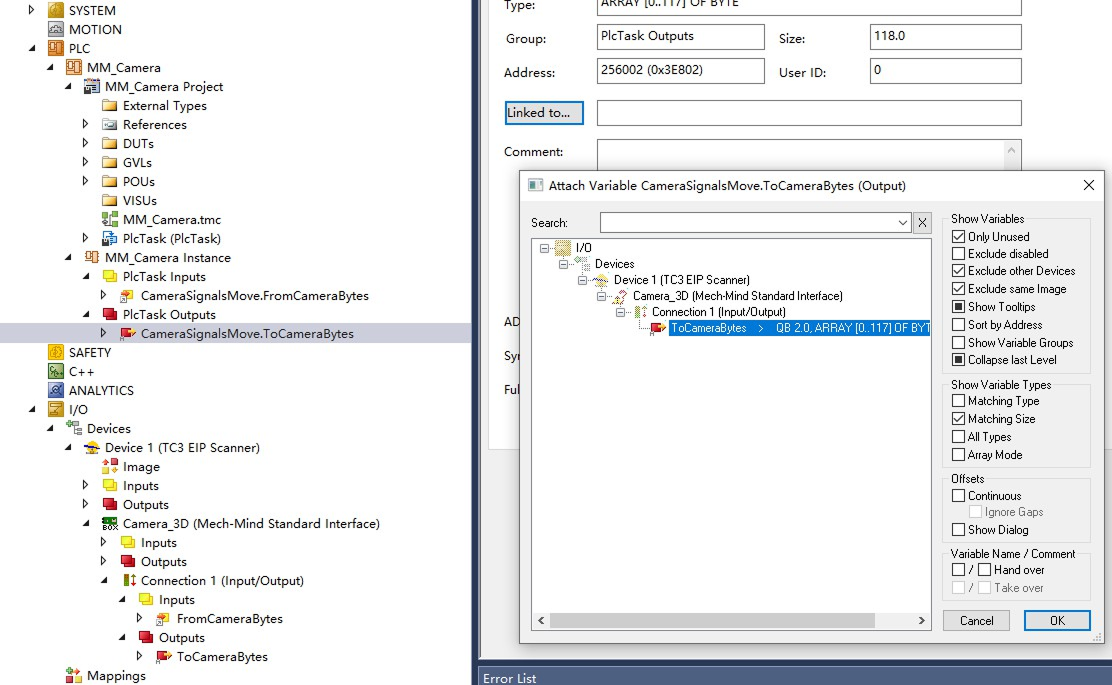
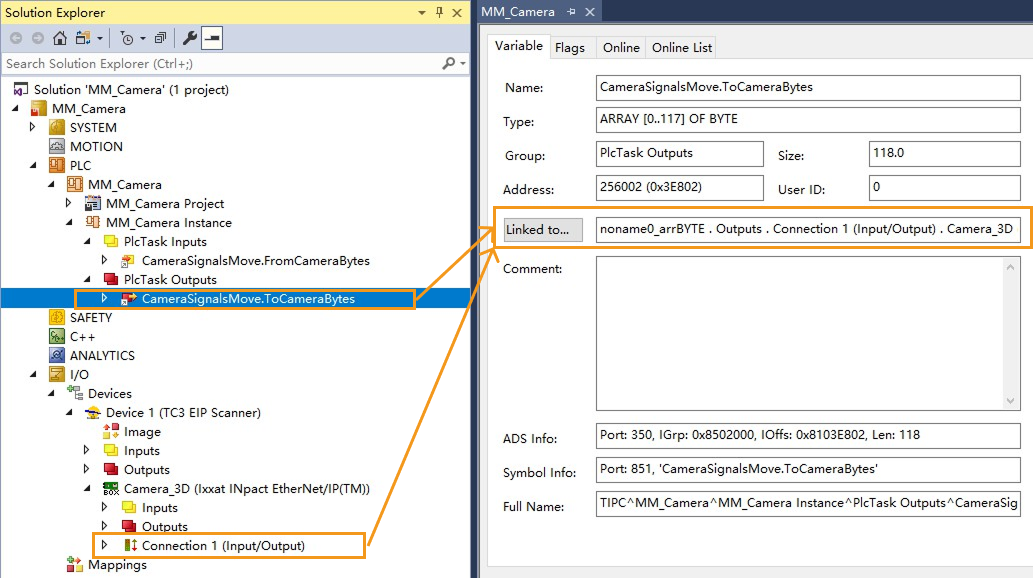
Dans le volet de navigation de gauche, développez PLC et assurez-vous que CameraSignalsMove.FromCameraBytes et CameraSignalsMove.ToCameraBytes sont tous deux liés à Connection 1 (Input/Output).
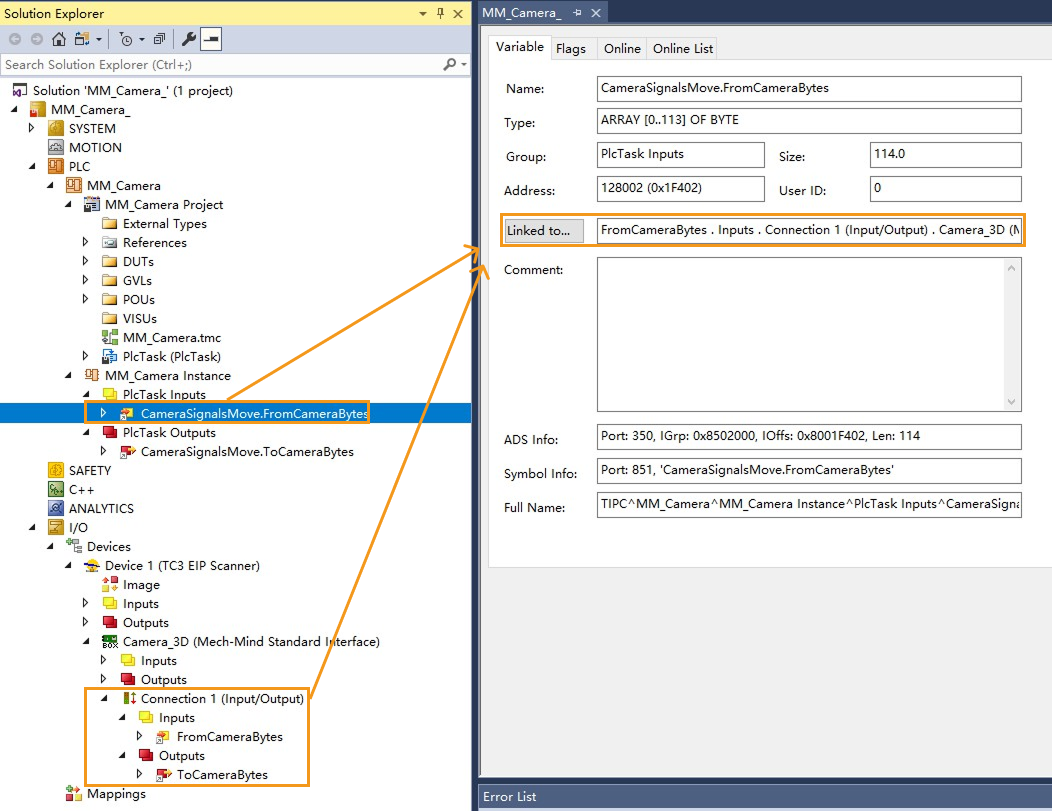
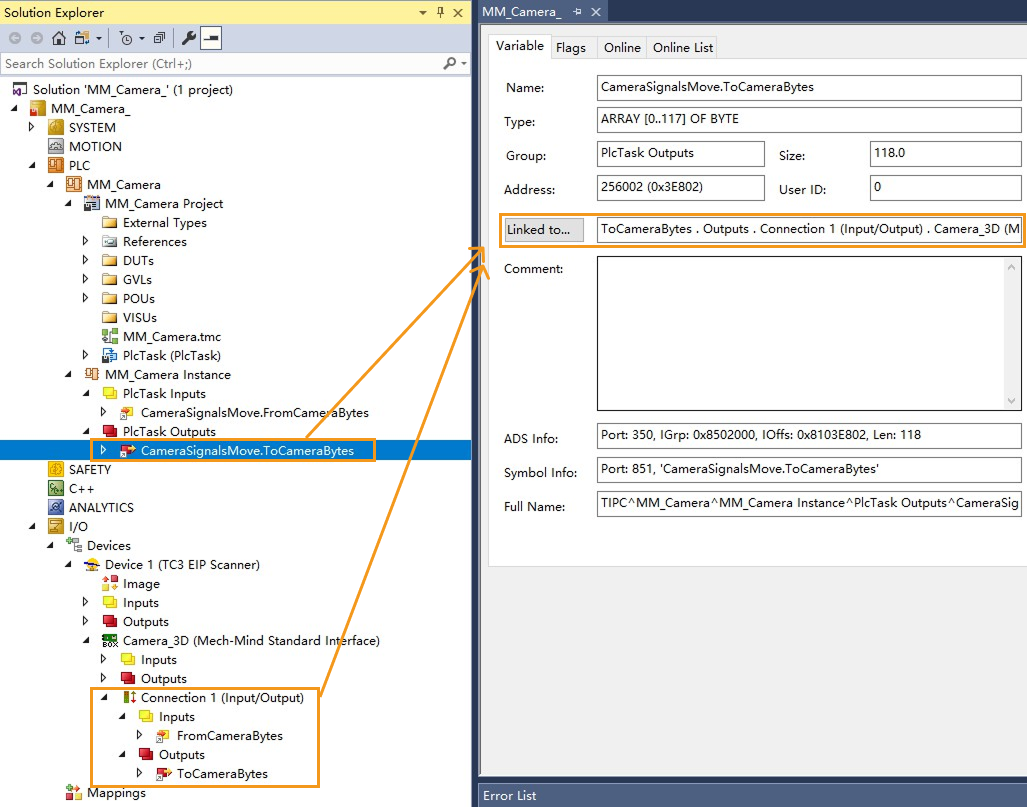
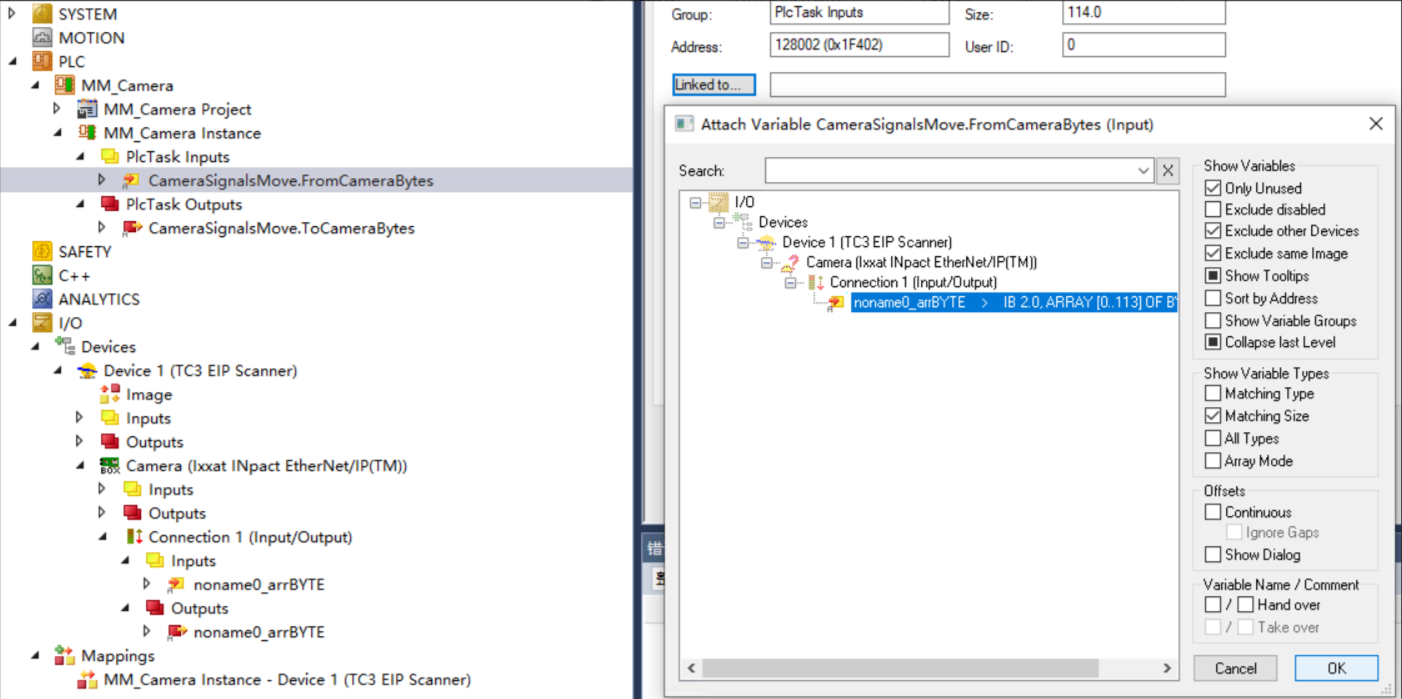
Si les variables ne sont pas liées automatiquement, cliquez sur Lier à…. Dans la fenêtre qui s’affiche, sélectionnez les variables correspondantes pour les lier manuellement. Par exemple, la figure ci-dessous montre que CameraSignalsMove.FromCameraBytes et CameraSignalsMove.ToCameraBytes sont liées manuellement.
Si vous utilisez une carte PCI‑e pour établir la communication EtherNet/IP, cliquez sur cette ligne pour afficher les opérations détaillées.
-
Dans le volet de navigation de gauche, cliquez avec le bouton droit sur PLC et sélectionnez Add Existing Item.
Dans la fenêtre qui s’affiche, sélectionnez le fichier MM_Camera.tpzip (qui doit avoir été copié depuis l’IPC au préalable), et cliquez sur Ouvrir.
Le fichier MM_Camera.tpzip se trouve dans le dossier Communication Component/Robot_Interface/EthernetIP/Programming Samples/BECKHOFF PLC EthernetIPsous le chemin d’installation de Mech-Vision et Mech-Viz.
Cliquez sur Oui dans la fenêtre contextuelle comme ci-dessous.
-
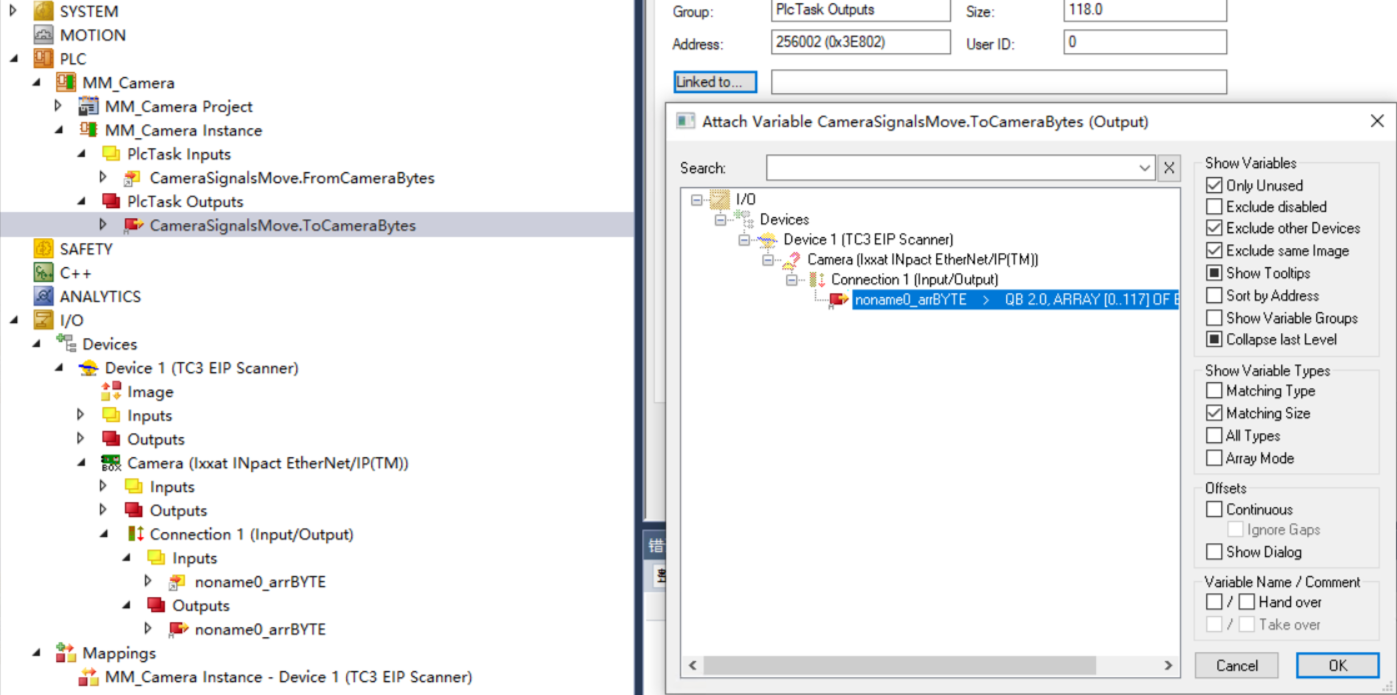
Dans le volet de navigation de gauche, développez PLC et assurez-vous que CameraSignalsMove.FromCameraBytes et CameraSignalsMove.ToCameraBytes sont tous deux liés à Connection 1 (Input/Output).
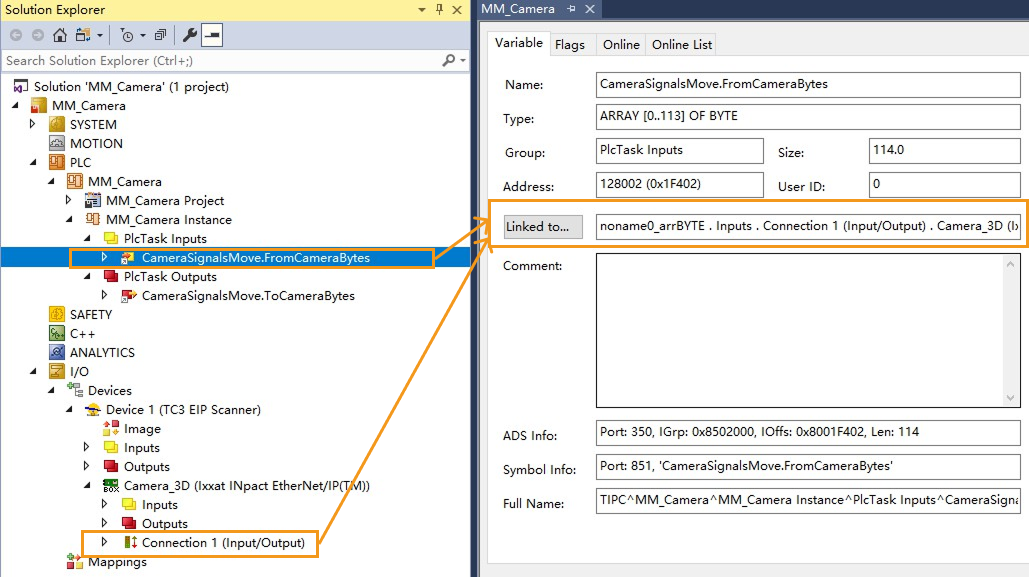
Si les variables ne sont pas liées automatiquement, cliquez sur Lier à…. Dans la fenêtre qui s’affiche, sélectionnez les variables correspondantes pour les lier manuellement. Par exemple, la figure ci-dessous montre que CameraSignalsMove.FromCameraBytes et CameraSignalsMove.ToCameraBytes sont liées manuellement.
Activer la configuration et se connecter au programme PLC
-
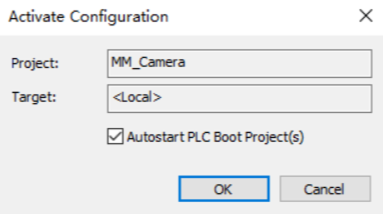
Dans la barre d’outils, cliquez sur Activate Configuration.

Dans la fenêtre qui s’affiche, définissez Project et Target, puis cliquez sur OK.
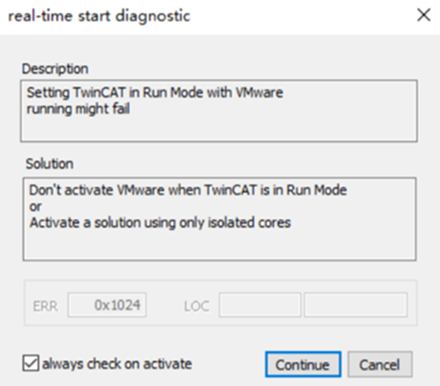
Dans la fenêtre qui s’affiche, cliquez sur Continuer.
Dans la fenêtre qui s’affiche, cliquez sur OK.
-
Dans la barre d’outils, cliquez sur Login, et le PLC passera en mode Exécution.

Vérifier la communication
-
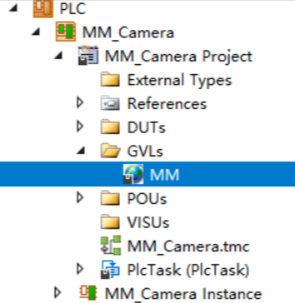
Dans le volet de navigation de gauche, double-cliquez sur MM.
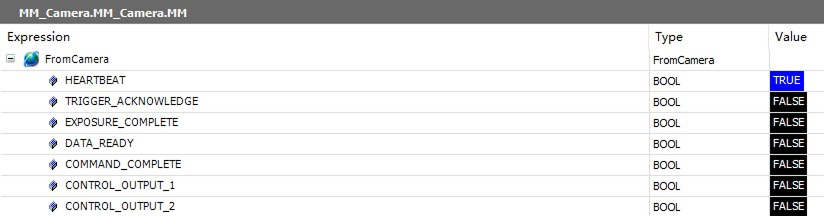
Si la connexion réussit, le signal FromCamera.HEARTBEAT dans la table de variables MM changera en continu.
-
La connexion du PLC est réussie si le message suivant s’affiche dans l’onglet Console du panneau Journal de Mech-Vision : Connect to ETHERNET IP controller successfully. Si vous ne voyez pas ce message de journal, veuillez vérifier :
-
Si le matériel est correctement connecté ;
-
Si le service d’interface a bien été activé dans Mech-Vision ;
-
Si la configuration du projet TwinCAT 3 a bien été activée ;
-
Si le programme PLC s’est bien connecté et a démarré.
-
Tester avec un projet Mech-Vision/Mech-Viz
Cette section explique comment utiliser le FB du programme d’exemple pour déclencher le projet Mech-Vision afin d’obtenir le résultat de vision et déclencher le projet Mech-Viz afin d’obtenir la trajectoire planifiée.
Prérequis
-
Revenez à Mech-Vision et créez un projet Mech-Vision. Cliquez avec le bouton droit sur la solution et sélectionnez Autoload Solution. Les projets de la solution sont également chargés automatiquement. Entre-temps, le numéro de projet apparaîtra devant chaque nom de projet.
-
Créez un projet Mech-Viz. Cliquez avec le bouton droit sur le nom du projet dans Resources de Mech-Viz et sélectionnez Autoload Project.
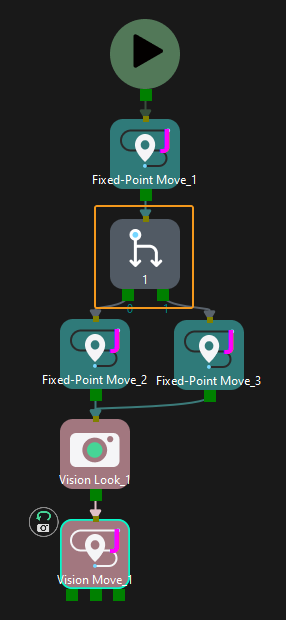
Le projet Mech-Viz utilisé pour les tests doit contenir une étape « Branch by Msg » qui a été renommée en 1 comme illustré ci-dessous.
Obtenir le résultat de vision depuis Mech-Vision
Configurer les programmes
-
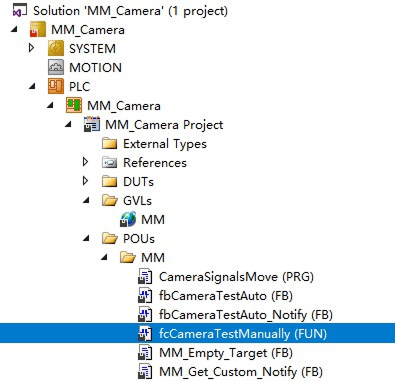
Dans le volet de navigation du logiciel TwinCAT 3, double-cliquez sur fcCameraTestManually.
-
Dans la section 1 du programme fcCameraTestManually, réglez l’interrupteur d’activation MM.ToCamera.COM_ENABLE sur ON.

-
Dans la section 4 du programme fcCameraTestManually, définissez les valeurs suivantes.
-
Définissez la valeur de port de Vision_Proj_Num à 1, ce qui signifie que le projet n° 1 de Mech-Vision sera exécuté.
-
Définissez la valeur de Req_Pose_Num à 0, ce qui signifie que tous les points de vision devraient être renvoyés par Mech-Vision.
-
Définissez la valeur de Robot_Pose_Type à 0. Alors, la pose de prise de vue n’a pas besoin d’être envoyée au projet Mech-Vision. Par exemple, la pose de prise de vue n’a pas besoin d’être envoyée lorsque la caméra est montée en mode eye-to-hand.

-
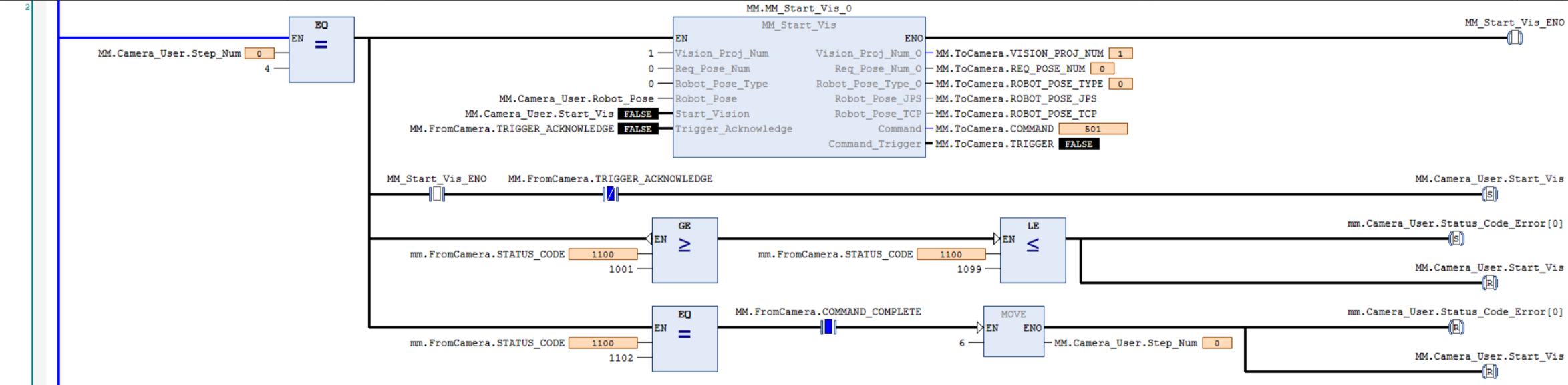
Déclencher l’exécution du projet Mech-Vision
-
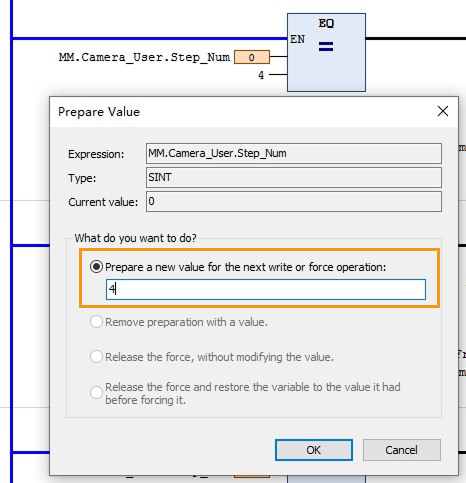
Dans la section 4 du programme fcCameraTestManually, double-cliquez sur la variable MM.Camera_User.Step_Num. Dans la boîte de saisie qui s’affiche, entrez 4 pour définir la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 4, puis cliquez sur OK.
-
Dans la section 4 du programme fcCameraTestManually, double-cliquez sur la variable MM.Camera_User.Start_Vis et définissez-la sur TRUE.

-
Dans la barre d’outils, cliquez sur Write values pour déclencher l’exécution du projet Mech-Vision.

-
Double-cliquez à nouveau sur la variable MM.Camera_User.Start_Vis et définissez-la sur FALSE.
-
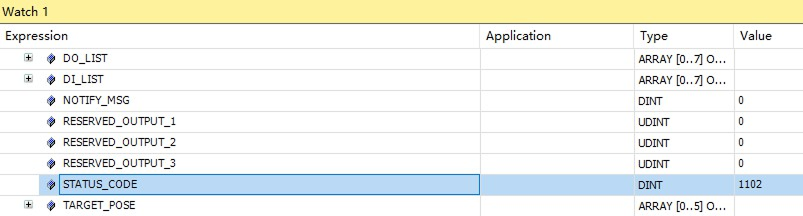
Vérifiez si la valeur retournée de STATUS_CODE est 1102.
-
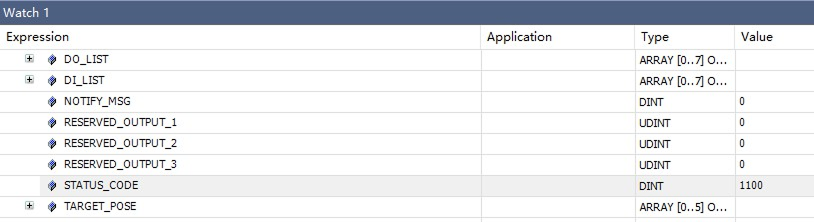
Cliquez sur l’onglet Watch 1 dans la barre d’état pour vous connecter à la fenêtre de surveillance, puis ajoutez la variable MM.FromCamera.

-
Développez la variable MM.FromCamera et vérifiez la valeur de STATUS_CODE.
-
Si la valeur de STATUS_CODE est 1102, cela indique que le projet Mech-Vision a bien été déclenché.
-
Si 10XX s’affiche pour STATUS_CODE et que vous souhaitez dépanner le problème, voir Codes d’état et dépannage.
-
-
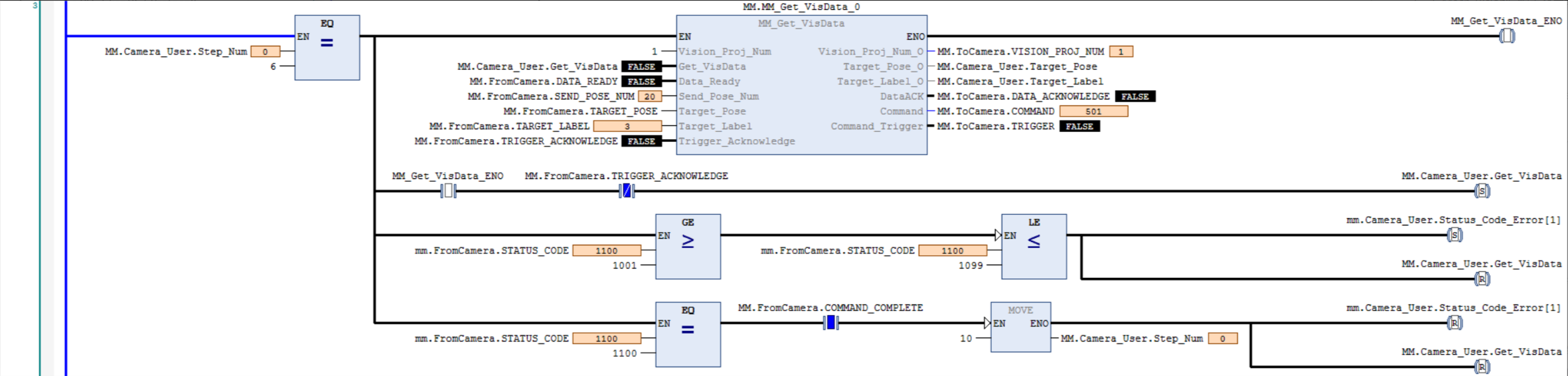
Obtenir le résultat de vision depuis Mech-Vision
-
Après que STATUS_CODE a renvoyé 1102, allez à la section 5 du programme fcCameraTestManually et définissez la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 6.
Double-cliquez sur la variable MM.Camera_User.Get_VisData et définissez-la sur TRUE pour obtenir le résultat de vision.

-
Dans la barre d’outils, cliquez sur Write values pour obtenir le résultat de vision.
-
Double-cliquez à nouveau sur la variable MM.Camera_User.Get_VisData et définissez-la sur FALSE.
-
Dans la fenêtre de surveillance, vérifiez la valeur de STATUS_CODE.
-
Si la valeur de STATUS_CODE est 1100, cela indique que le résultat de vision a bien été obtenu.
-
Si 10XX s’affiche pour STATUS_CODE et que vous souhaitez dépanner le problème, voir Codes d’état et dépannage.
-
-
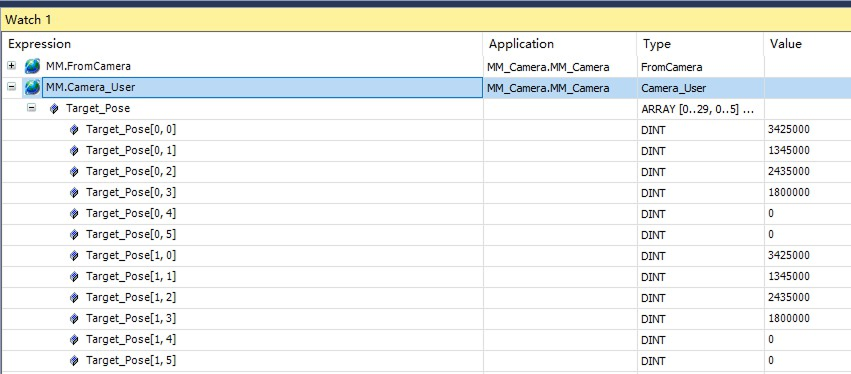
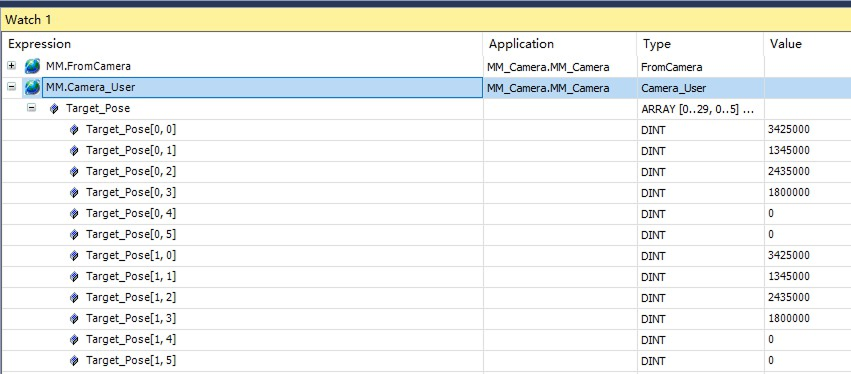
Vérifiez les valeurs de Target_Pose.
-
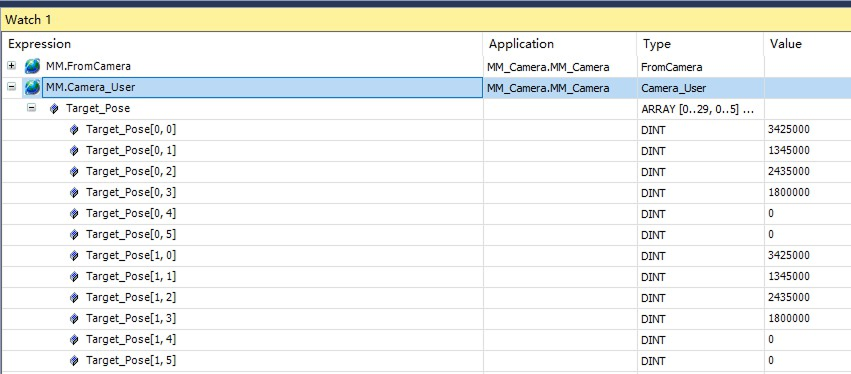
Dans la fenêtre de surveillance, ajoutez la variable MM.Camera_User.

-
Développez la variable MM.Camera_User et vérifiez les valeurs de Target_Pose. Dans la figure, deux ensembles de données de pose envoyés par le logiciel du système de vision sont affichés. Divisez les données de pose par 10000 pour obtenir les données de pose réelles.
-
Obtenir la trajectoire planifiée depuis Mech-Viz
Configurer les programmes
-
Dans la section 7 du programme fcCameraTestManually, définissez la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 10.
Double-cliquez sur la variable MM.Camera_User.Start_Empty et définissez-la sur TRUE pour effacer le résultat de vision obtenu précédemment.

-
Dans la barre d’outils, cliquez sur Write values.
-
Double-cliquez à nouveau sur la variable MM.Camera_User.Start_Empty et définissez-la sur FALSE.
-
Dans la fenêtre de surveillance, vérifiez les valeurs de Target_Pose après l’effacement du résultat de vision.
-
Dans la section 12 du programme fcCameraTestManually, définissez les valeurs de port de Branch_Name et Branch_Exit_Port sur 1, indiquant que le projet Mech-Viz prendra le port de sortie 1 de l’étape Branch by Msg dont l’ID d’étape est 1.

-
Dans la section 13 du programme fcCameraTestManually, définissez la valeur de port de Request_Pose_Type sur 1, indiquant que les points de passage planifiés par Mech-Viz seront renvoyés sous forme de positions articulaires.

Déclencher l’exécution du projet Mech-Viz
-
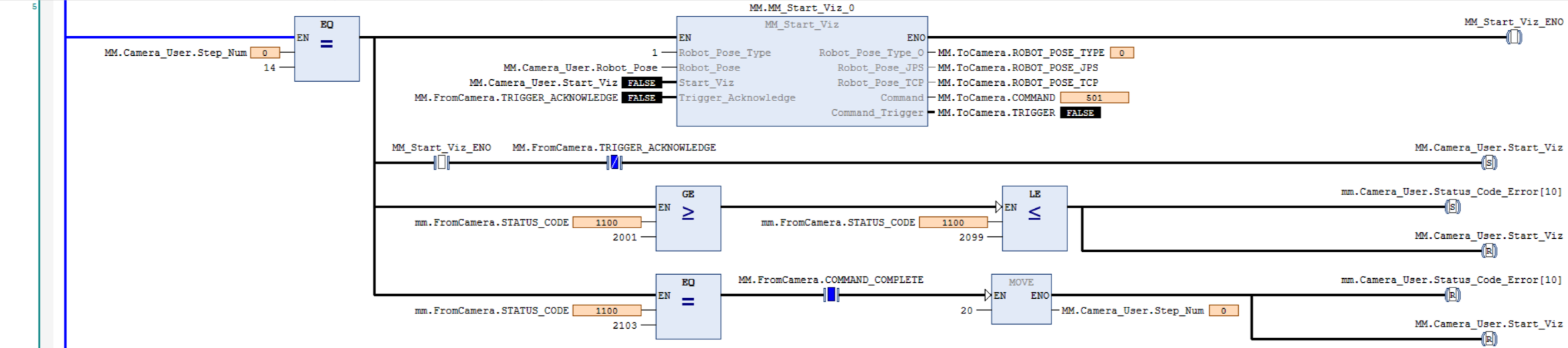
Dans la section 9 du programme fcCameraTestManually, définissez la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 14.
Double-cliquez sur la variable MM.Camera_User.Start_Viz et définissez-la sur TRUE pour déclencher l’exécution du projet Mech-Viz.

-
Dans la barre d’outils, cliquez sur Write values pour déclencher l’exécution du projet Mech-Viz.
-
Double-cliquez à nouveau sur la variable MM.Camera_User.Start_Viz et définissez-la sur FALSE.
-
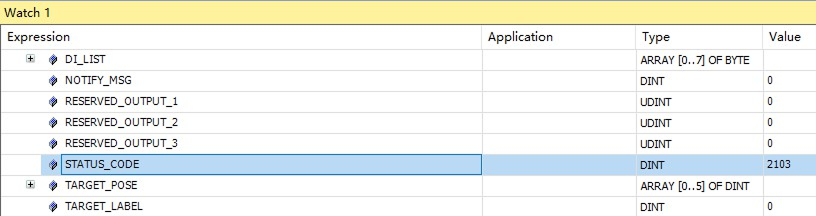
Dans la fenêtre de surveillance, vérifiez la valeur de STATUS_CODE.
-
Si la valeur de STATUS_CODE est 2103, cela indique que le projet Mech-Viz a bien été déclenché.
-
Si 20XX s’affiche pour STATUS_CODE et que vous souhaitez dépanner le problème, voir Codes d’état et dépannage.
-
Définir le port de sortie pour l’étape Branch by Msg dans Mech-Viz
-
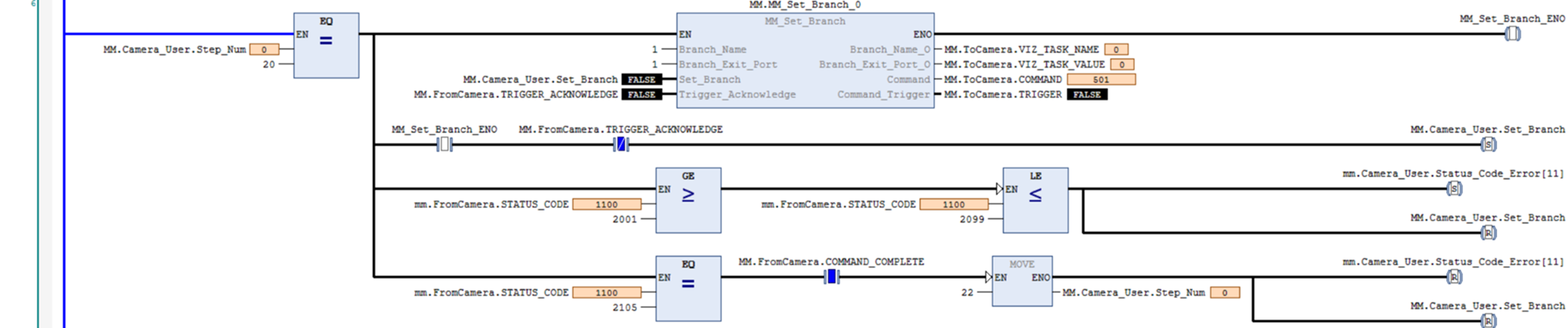
Dans la section 12 du programme fcCameraTestManually, définissez la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 20.
Double-cliquez sur la variable MM.Camera_User.Set_Branch et définissez-la sur TRUE pour définir le port de sortie de l’étape Branch by Msg.

-
Dans la barre d’outils, cliquez sur Write values pour définir le port de sortie de l’étape Branch by Msg.
-
Double-cliquez à nouveau sur la variable MM.Camera_User.Set_Branch et définissez-la sur FALSE.
-
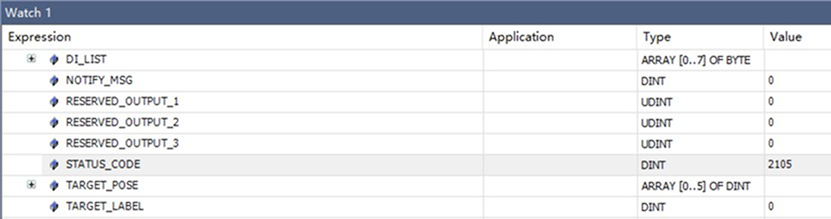
Dans la fenêtre de surveillance, vérifiez la valeur de STATUS_CODE.
-
Si la valeur de STATUS_CODE est 2105, cela indique que le port de sortie de l’étape Branch by Msg a bien été défini.
-
Si 20XX s’affiche pour STATUS_CODE et que vous souhaitez dépanner le problème, voir Codes d’état et dépannage.
-
Obtenir la trajectoire planifiée depuis Mech-Viz
-
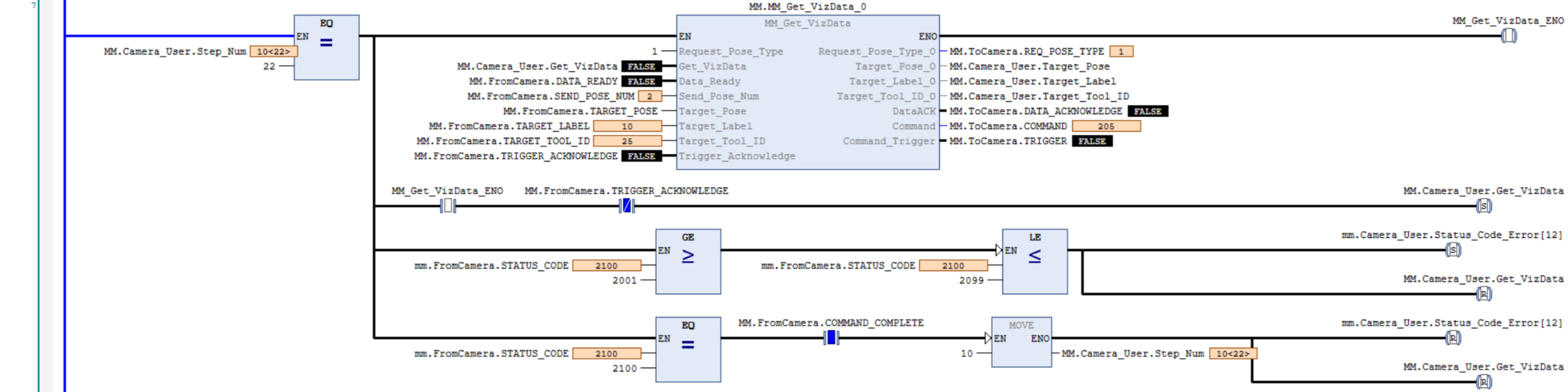
Dans la section 13 du programme fcCameraTestManually, définissez la prochaine valeur d’écriture de MM.Camera_User.Step_Num sur 22.
Double-cliquez sur la variable MM.Camera_User.Get_VizData et définissez-la sur TRUE pour obtenir la trajectoire planifiée.
Vérifiez ensuite la valeur de MM.FromCamera.SEND_POSE_NUM. 
-
Dans la barre d’outils, cliquez sur Write values pour obtenir la trajectoire planifiée.
-
Double-cliquez à nouveau sur la variable MM.Camera_User.Get_VizData et définissez-la sur FALSE.
-
La valeur de MM.FromCamera.SEND_POSE_NUM est 2, indiquant que deux ensembles de données de positions articulaires ont été obtenus dans cet exemple.
-
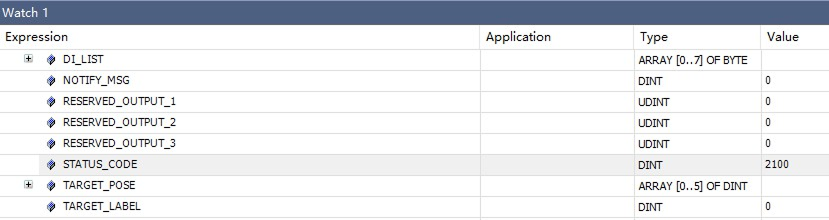
Dans la fenêtre de surveillance, vérifiez la valeur de STATUS_CODE.
-
Si la valeur de STATUS_CODE est 2100, cela indique que la trajectoire planifiée a bien été obtenue.
-
Si 20XX s’affiche pour STATUS_CODE et que vous souhaitez dépanner le problème, voir Codes d’état et dépannage.
-
-
Vérifiez les valeurs retournées de Target_Pose dans la fenêtre de surveillance. Divisez les valeurs retournées par 10000 pour obtenir les données de pose réelles.