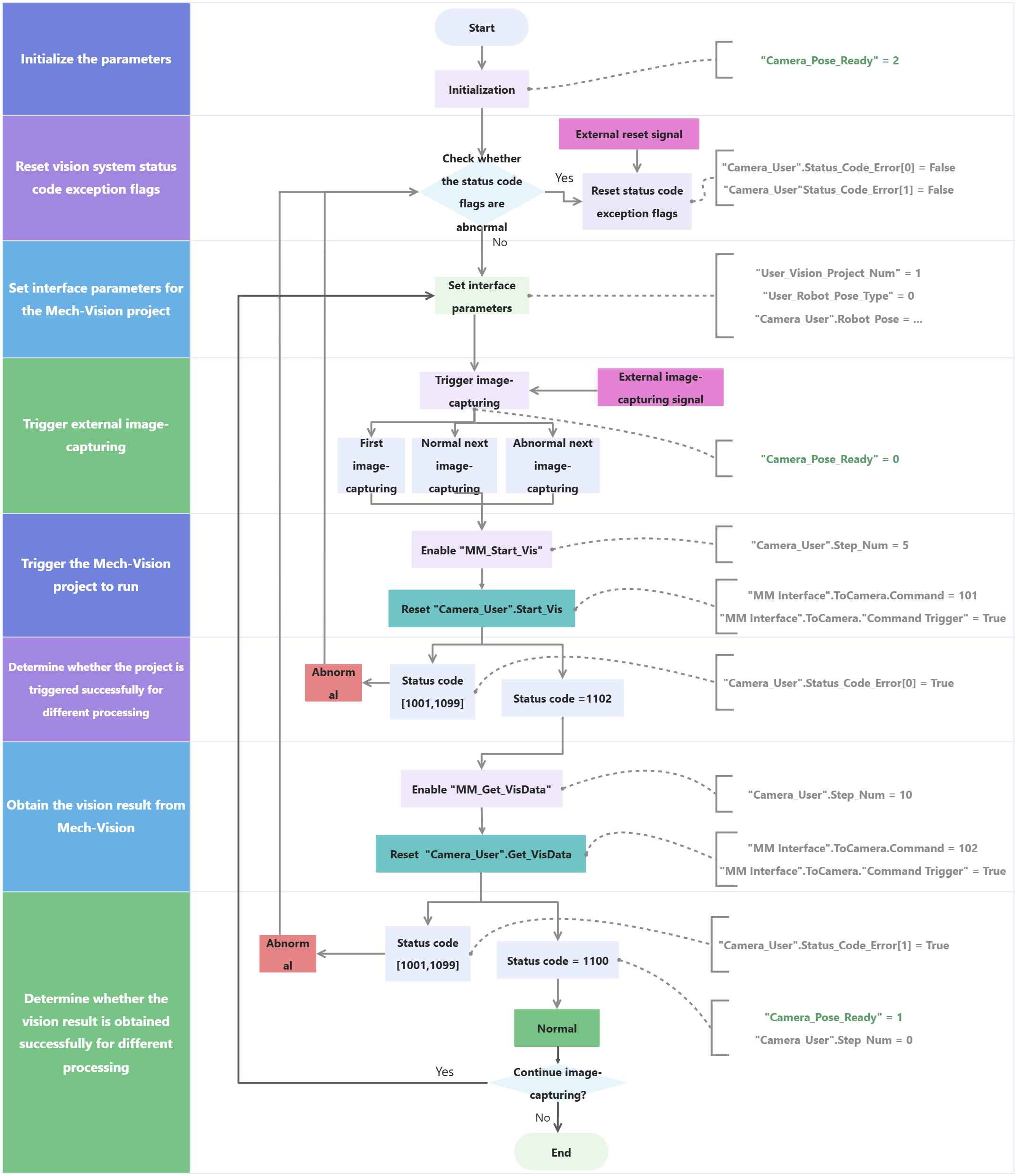
Initialiser les paramètres |
-
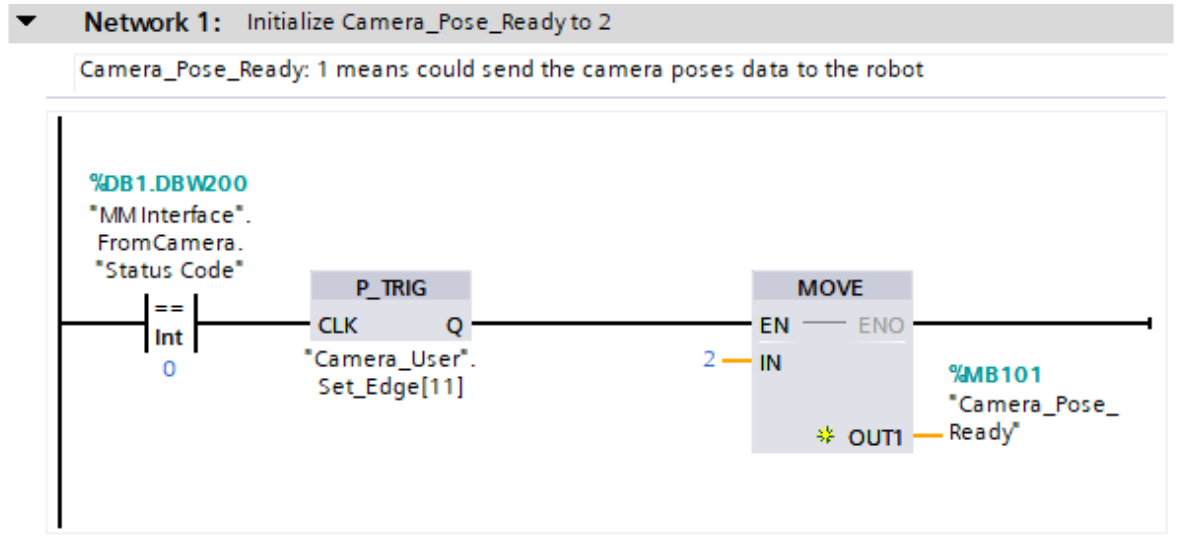
"MM Interface".FromCamera."Status Code": Un code d’état du système de vision.
-
P_TRIG: détecte le front montant du signal pour le résultat de l’opération logique ("MM Interface".FromCamera."Status Code" égal à 0).
-
MOVE: définit "Camera_Pose_Ready" à 2.
-
"Camera_Pose_Ready": Indique si l’automate a obtenu la trajectoire planifiée.
-
0: L’automate n’a pas obtenu la trajectoire planifiée lorsque la caméra était sur le point de capturer des images ou avait déjà capturé des images, ou lorsque Mech-Viz calculait la trajectoire planifiée.
-
1: La caméra a capturé des images, et l’automate a obtenu la trajectoire planifiée.
-
2: La caméra était prête à commencer la capture d’images pour la première fois, et l’automate n’a pas obtenu la trajectoire planifiée.
Ainsi, le Réseau 1 indique que ce n’est que lorsque "MM Interface".FromCamera."Status Code" est égal à 0 et que P_TRIG détecte un front montant que "Camera_Pose_Ready" est initialisé à 2.
|
Réinitialiser les indicateurs d’exception du code d’état du système de vision |
-
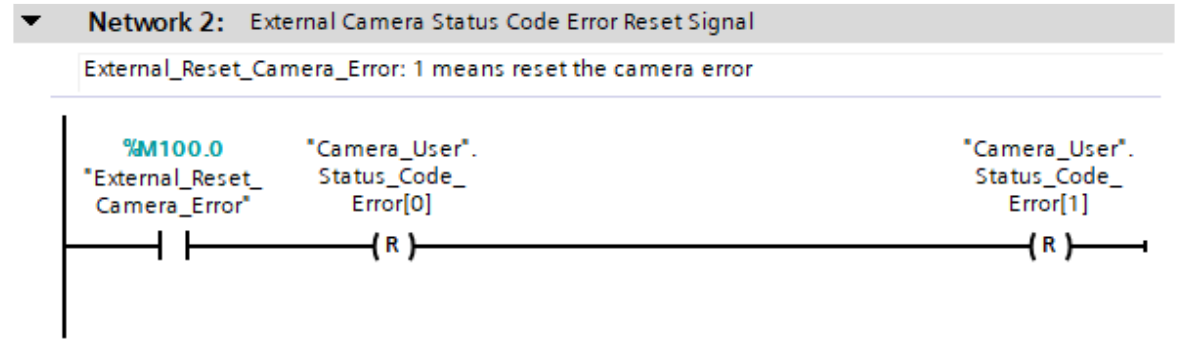
"Camera_User".Status_Code_Error[0]: Un indicateur d’exception du code d’état du système de vision. True indique que le projet Mech-Viz n’a pas été exécuté avec succès, c’est-à-dire qu’une exception s’est produite dans le système de vision.
-
"Camera_User".Status_Code_Error[1]: Un indicateur d’exception du code d’état du système de vision. True indique que le projet Mech-Viz n’a pas réussi à produire la trajectoire planifiée, c’est-à-dire qu’une exception s’est produite dans le système de vision.
-
"External_Reset_Camera_Error": Un signal de réinitialisation externe. Lorsqu’une exception se produit dans le système de vision et que le signal passe de False à True, les "Camera_User".Status_Code_Error[0] et "Camera_User".Status_Code_Error[1] qui suivent sont réinitialisés.
Ainsi, le Réseau 2 réinitialise "Camera_User".Status_Code_Error[0] et "Camera_User".Status_Code_Error[1] et définit "Camera_User".Step_Num à 0 lorsque "External_Reset_Camera_Error" est actif.
|
Définir les paramètres d’interface pour le projet Mech-Viz |
-
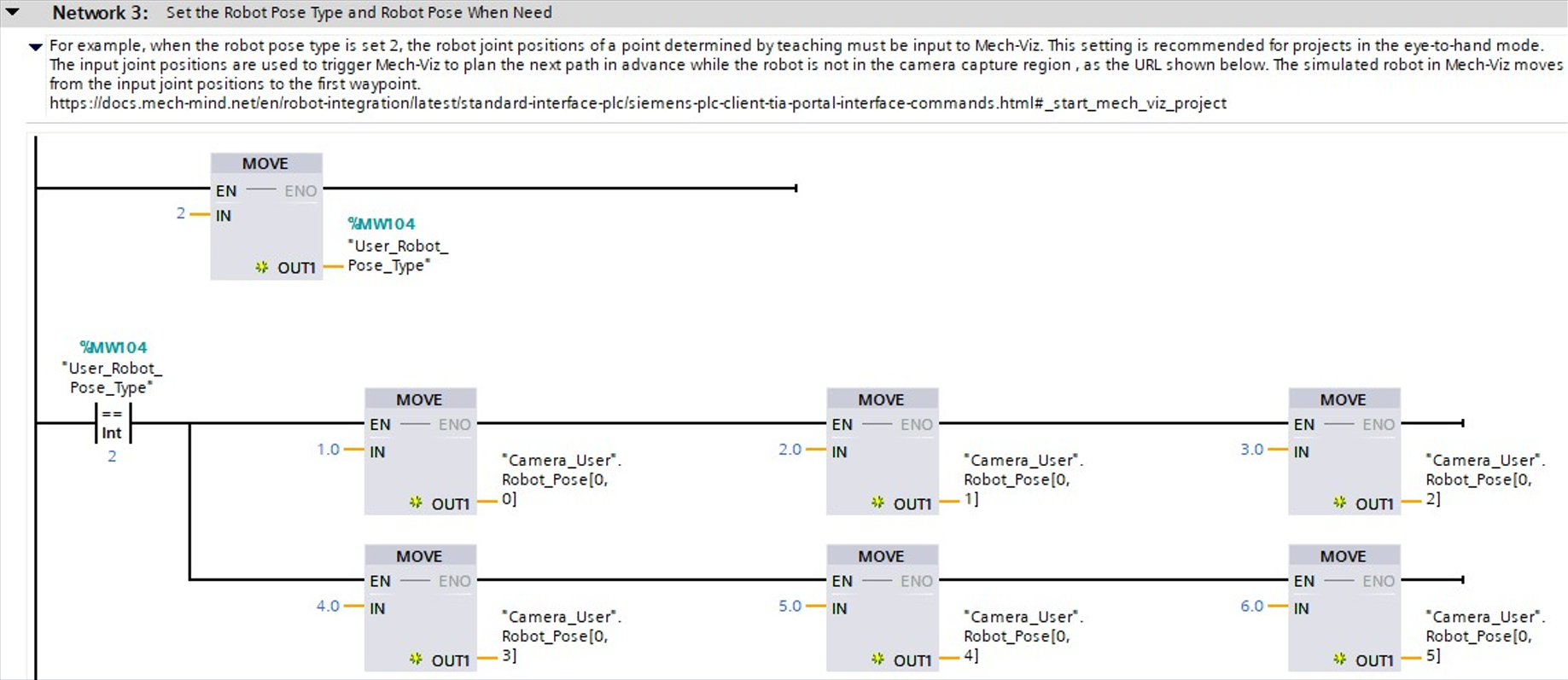
"User_Robot_Pose_Type": Spécifie le type de pose du robot réel à fournir au projet Mech-Viz. La valeur de ce paramètre doit être définie comme la valeur de Robot_Pose_Type de la commande MM_Start_Viz. Dans cet exemple, la valeur du paramètre est 2. Vous pouvez la modifier selon vos besoins.
-
"Camera_User".Robot_Pose[0,0] ~ [0,5]: Six valeurs de positions articulaires du robot. Lorsque "User_Robot_Pose_Type" est défini sur 2, les données de position articulaire sont des valeurs personnalisées définies côté robot. La valeur de "Camera_User".Robot_Pose[0,0]~[0,5] doit être définie comme la valeur du paramètre Robot_Pose[0,0]~[0,5] dans la commande MM_Start_Viz. Dans cet exemple, les positions articulaires de J1 ~ J6 du robot sont définies respectivement à 1.0, 2.0, 3.0, 4.0, 5.0 et 6.0. Vous pouvez modifier la valeur selon vos besoins et ajouter les données de pose de la bride du robot (c’est-à-dire la valeur du paramètre Robot_Pose[1,0]~[1,5] dans la commande MM_Start_Viz).
Ainsi, le Réseau 3 indique que si "User_Robot_Pose_Type" est défini sur 2, "Camera_User".Robot_Pose[0,0]~[0,5] sera défini successivement sur 1.0, 2.0, 3.0, 4.0, 5.0 et 6.0.
|
Déclencher la capture d’image externe |
-
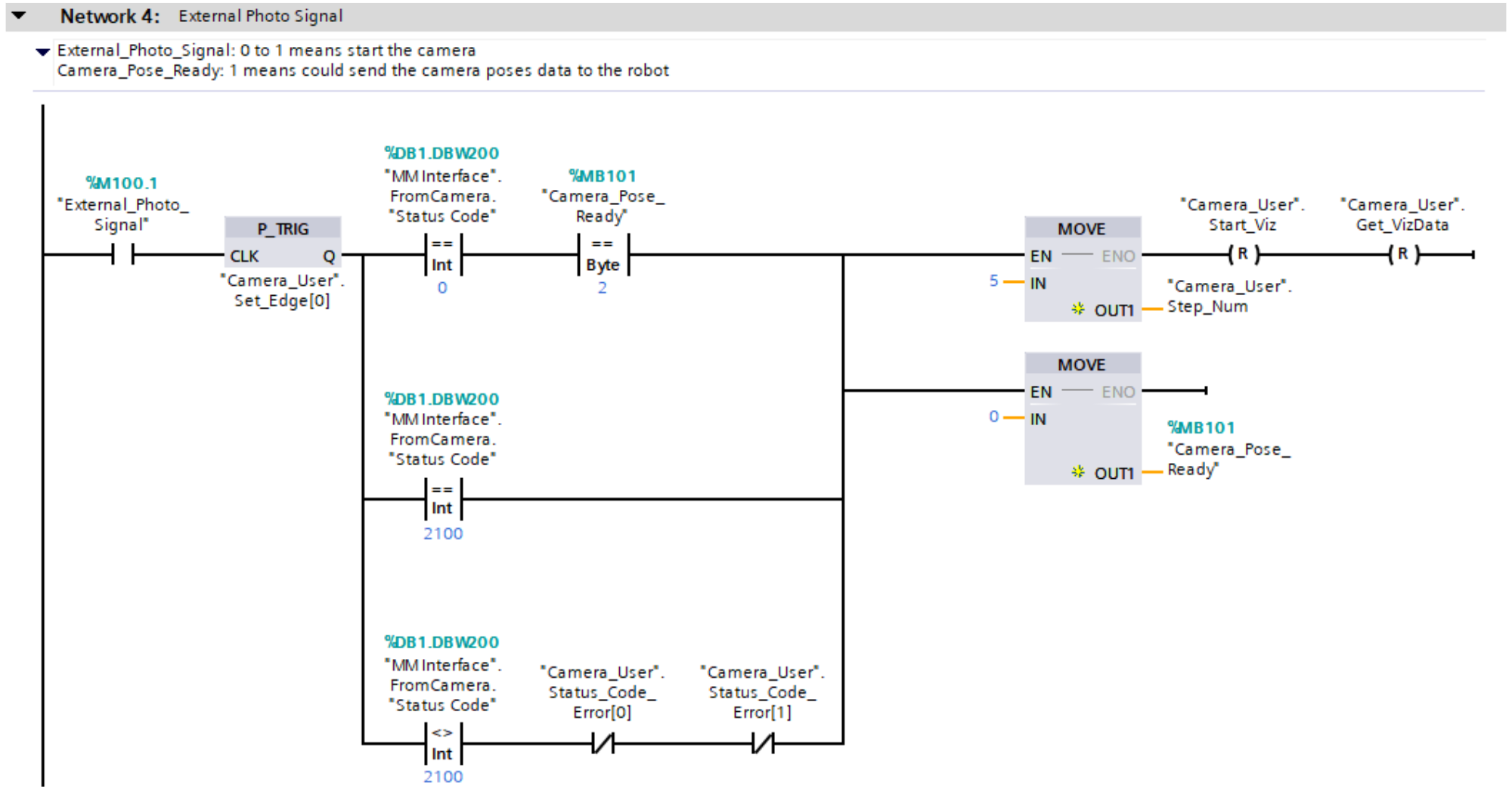
"External_Photo_Signal": Le signal externe qui déclenche la capture d’image lorsqu’un front montant se produit.
-
"MM Interface".FromCamera."Status Code": Un code d’état du système de vision. 2103 indique que l’automate a déclenché avec succès l’exécution du projet Mech-Viz. 2100 indique que l’automate a obtenu avec succès la trajectoire planifiée depuis Mech-Viz.
-
"Camera_User".Start_Viz: L’indicateur qui déclenche l’exécution du projet Mech-Viz lorsqu’un front montant se produit.
-
"Camera_User".Get_VizData: L’indicateur qui déclenche la récupération de la trajectoire planifiée de Mech-Viz lorsqu’un front montant se produit.
Ainsi, le Réseau 4 indique que le signal externe déclenchant la capture d’image lors d’un front montant est récupéré, puis les trois opérations de capture suivantes sont effectuées.
-
Une image est capturée pour la première fois. "MM Interface".FromCamera."Status Code" est défini sur 0, et "Camera_Pose_Ready" est défini sur 2.
-
Une image est capturée normalement la fois suivante. "MM Interface".FromCamera."Status Code" est égal à 2100.
-
Une erreur est signalée lors de la capture d’une image la fois suivante. "MM Interface".FromCamera."Status Code" n’est pas égal à 2100, et "Camera_User".Status_Code_Error[0] et "Camera_User".Status_Code_Error[1] sont tous deux définis sur False.
Enfin, "Camera_User".Step_Num est défini sur 5, "Camera_User".Start_Viz et "Camera_User".Get_VizData sont réinitialisés, et "Camera_Pose_Ready" est défini sur 0.
|
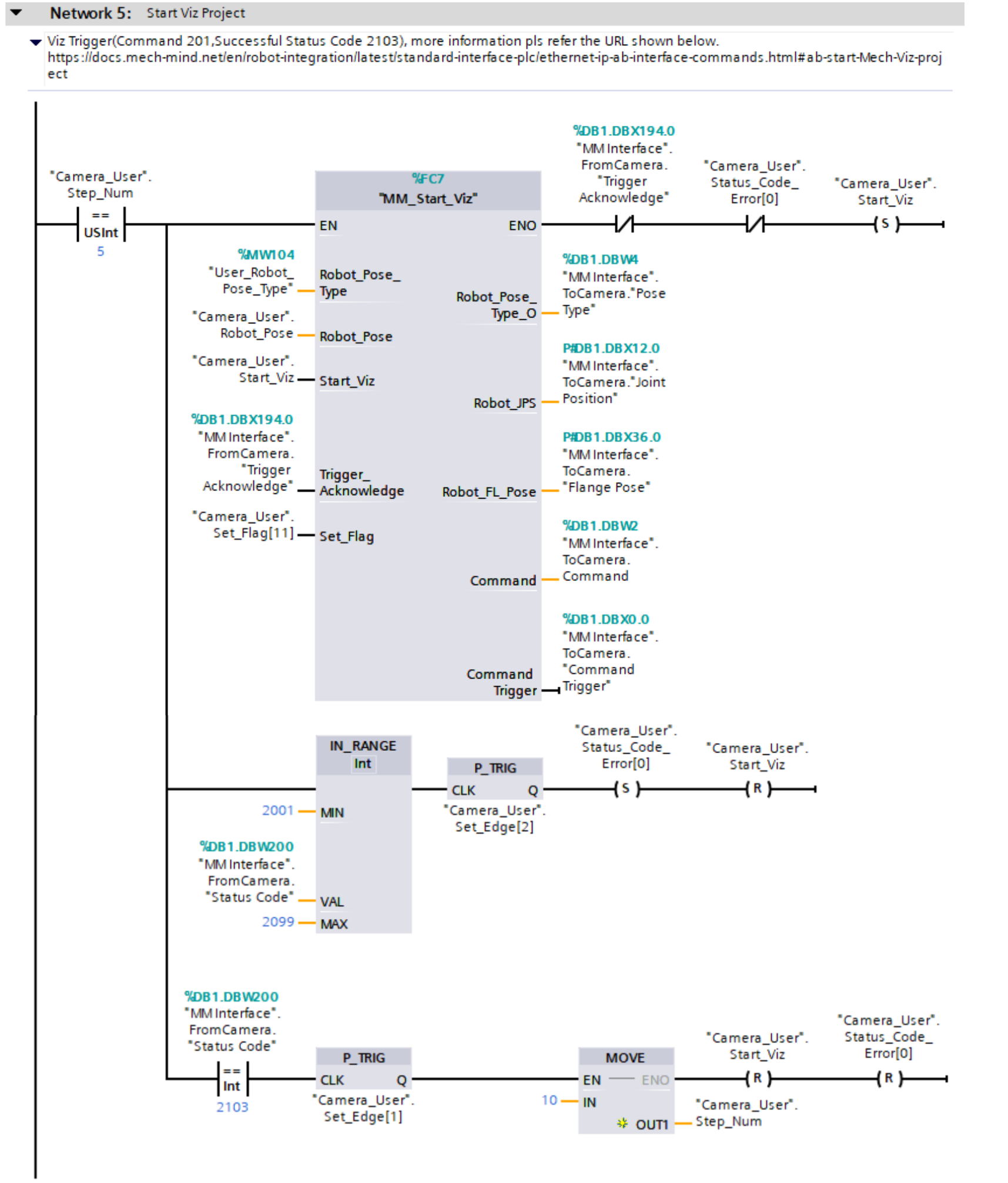
Déclencher l’exécution du projet Mech-Viz et déterminer si le déclenchement a réussi afin d’appliquer des traitements différents |
|
|
Pour plus d’informations sur les paramètres d’entrée et de sortie de MM_Start_Viz, voir MM_Start_Viz.
|
Le Réseau 5 indique que si "Camera_User".Step_Num est défini sur 5, les opérations suivantes sont effectuées.
-
MM_Start_Viz est activée.
-
Lorsque "MM Interface".FromCamera."Trigger Acknowledge" est défini sur False et que "Camera_User".Status_Code_Error[0] est défini sur False, "Camera_User".Start_Viz est réinitialisé et l’automate déclenche l’exécution du projet Mech-Viz.
-
Si "MM Interface".FromCamera."Status Code" est compris entre 2001 et 2099 (inclus), cela indique une erreur du système de vision. À ce stade, le front montant de cette sortie logique est capturé à l’aide de la commande P_TRIG. Lorsque "MM Interface".FromCamera."Trigger Acknowledge" est True, "Camera_User".Status_Code_Error[0] est positionné, et "Camera_User".Start_Viz est réinitialisé. Pour des informations sur la cause d’un code d’état spécifique, voir Codes d’état et codes d’erreur de l’Interface Standard.
-
Si la valeur de "MM Interface".FromCamera."Status Code" est 2103, le système de vision a exécuté avec succès la commande envoyée par l’automate. Dans ce cas, la commande P_TRIG est appelée pour récupérer le front montant de la sortie logique, une valeur de 10 est attribuée à "Camera_User".Step_Num, et "Camera_User".Start_Viz et "Camera_User".Status_Code_Error[0] sont réinitialisés.
|
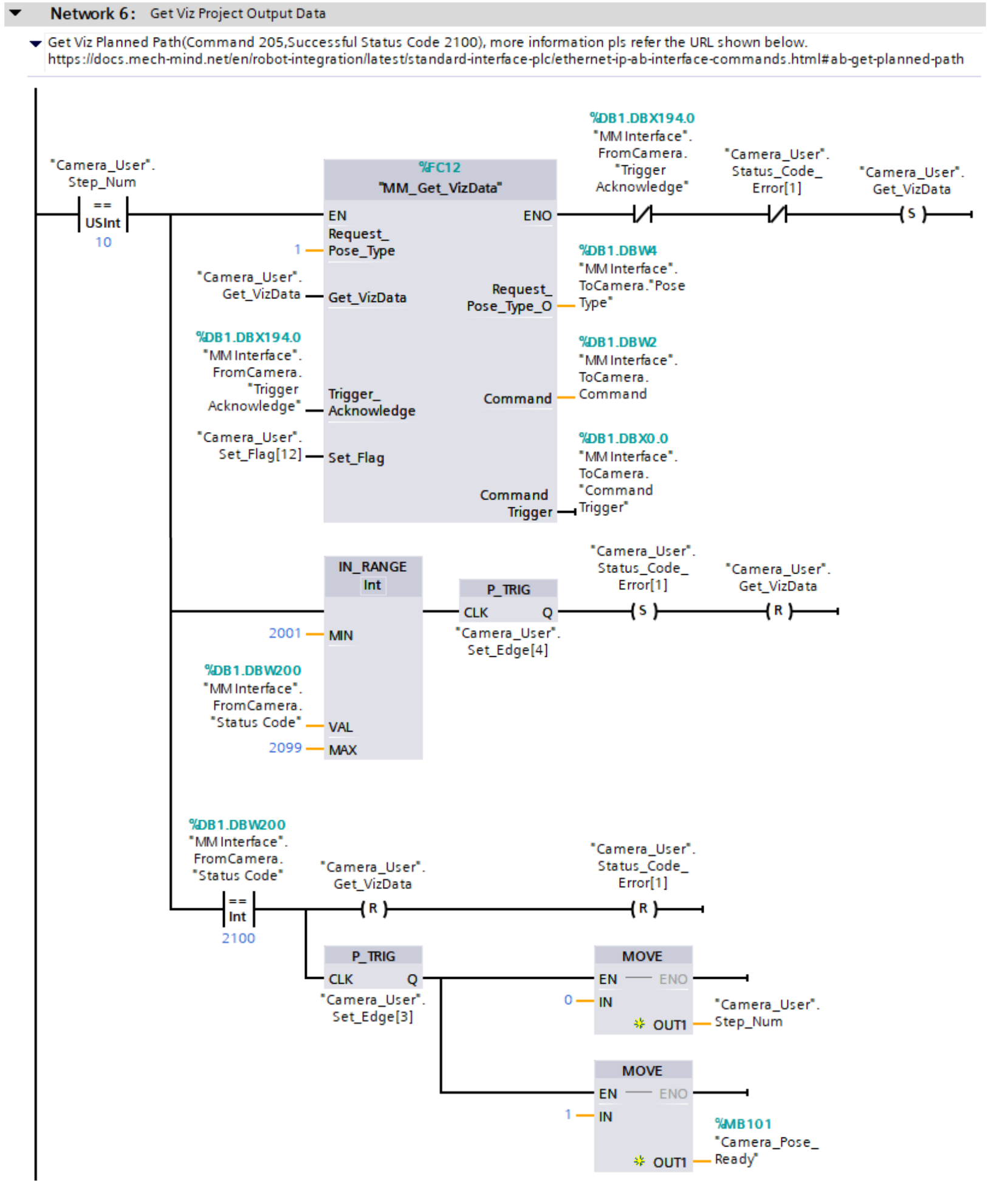
Obtenir la trajectoire planifiée du projet Mech-Viz et déterminer si l’obtention a réussi pour appliquer des traitements différents |
|
|
Pour plus d’informations sur les paramètres d’entrée et de sortie de MM_Get_VizData, voir MM_Get_VizData.
|
Le Réseau 6 indique que si "Camera_User".Step_Num est défini sur 10, les opérations suivantes sont effectuées.
-
MM_Get_VizData est activée.
-
Lorsque "MM Interface".FromCamera."Trigger Acknowledge" est défini sur False et que "Camera_User".Status_Code_Error[1] est défini sur False, "Camera_User".Get_VizData est positionné et l’automate commence à obtenir la trajectoire planifiée produite par le projet Mech-Viz.
-
Si "MM Interface".FromCamera."Status Code" est compris entre 2001 et 2099 (inclus), cela indique une erreur du système de vision. À ce stade, le front montant de cette sortie logique est capturé à l’aide de la commande P_TRIG. Lorsque "MM Interface".FromCamera."Trigger_Acknowledge" est True, "Camera_User".Status_Code_Error[1] est positionné et "Camera_User".Get_VizData est réinitialisé. Pour des informations sur la cause d’un code d’état spécifique, voir Codes d’état et codes d’erreur de l’Interface Standard.
-
Si la valeur de "MM Interface".FromCamera."Status Code" est 2100, le système de vision a exécuté avec succès la commande envoyée par l’automate. Dans ce cas, "Camera_User".Get_VizData et "Camera_User".Status_Code_Error[1] sont réinitialisés. La commande P_TRIG est appelée pour récupérer le front montant de la sortie logique ("MM Interface".FromCamera."Status Code" égal à 2100), une valeur de 0 est attribuée à "Camera_User".Step_Num, et une valeur de 1 est attribuée à "Camera_Pose_Ready". Cela indique que l’automate a obtenu la trajectoire planifiée de Mech-Viz et peut transmettre la trajectoire planifiée au robot.
|