DENSO Étalonnage automatique
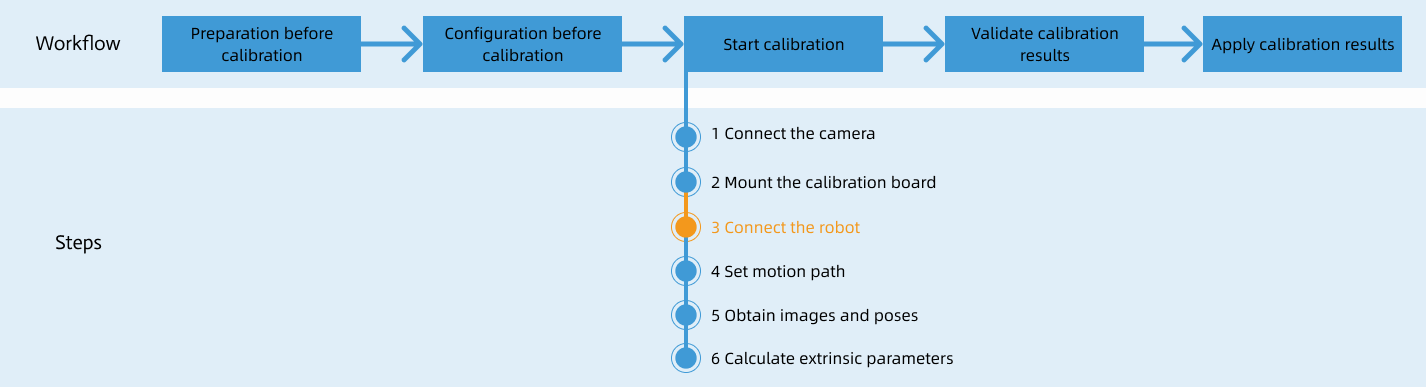
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner le programme d’étalonnage
-
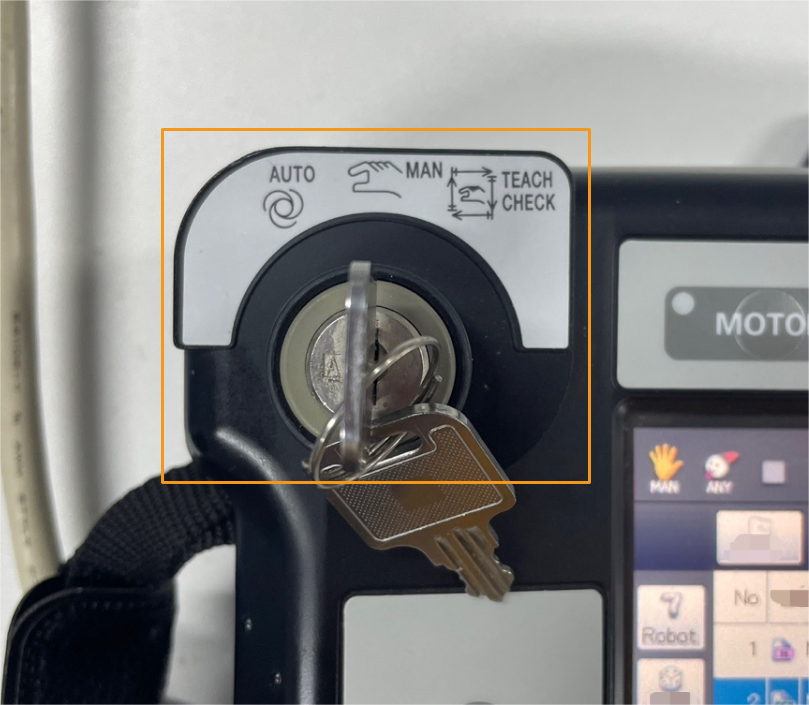
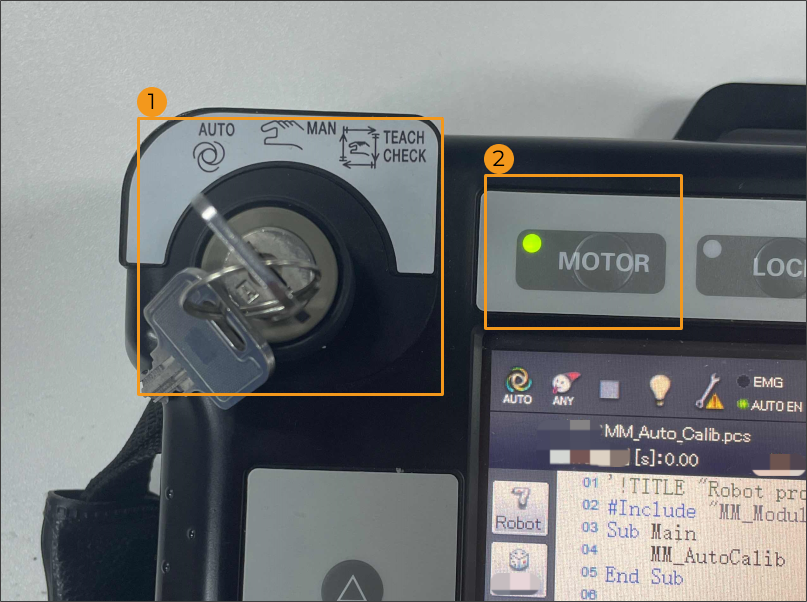
Tournez la clé du boîtier d’apprentissage sur MAN (le mode manuel).
-
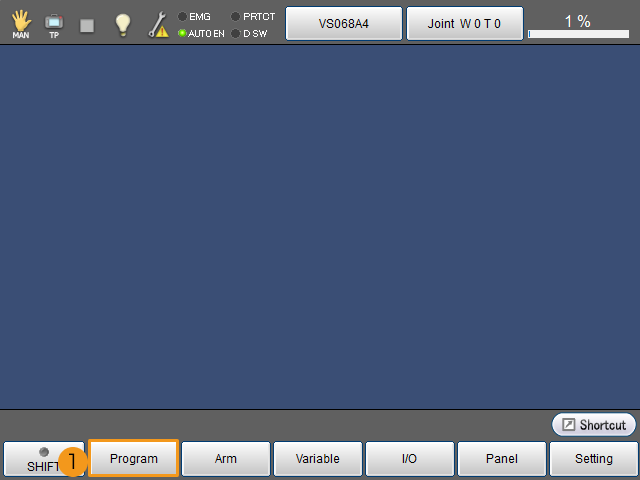
Dans l’interface principale du boîtier d’apprentissage, sélectionnez Programme dans le coin inférieur gauche.
-
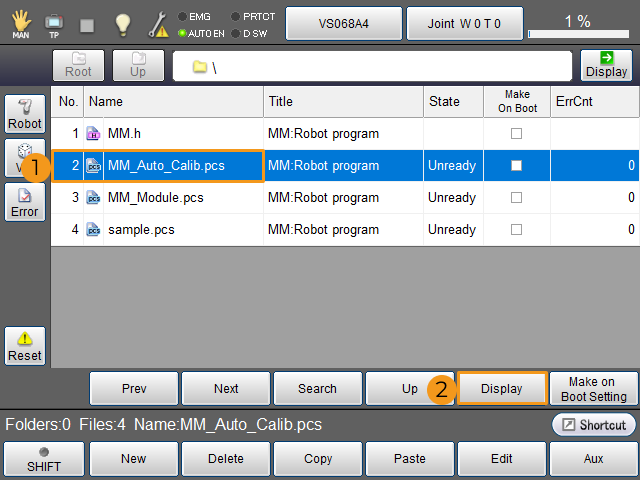
Dans l’interface contextuelle, sélectionnez le programme MM_Auto_Calib.pcs, puis sélectionnez Afficher.
2. Définir le point de départ de l’étalonnage
-
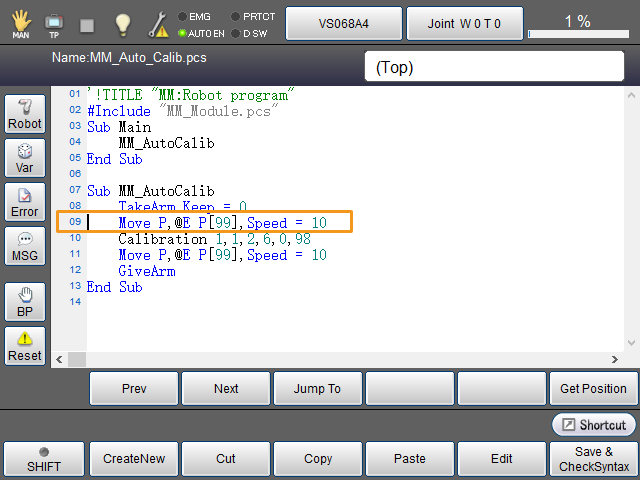
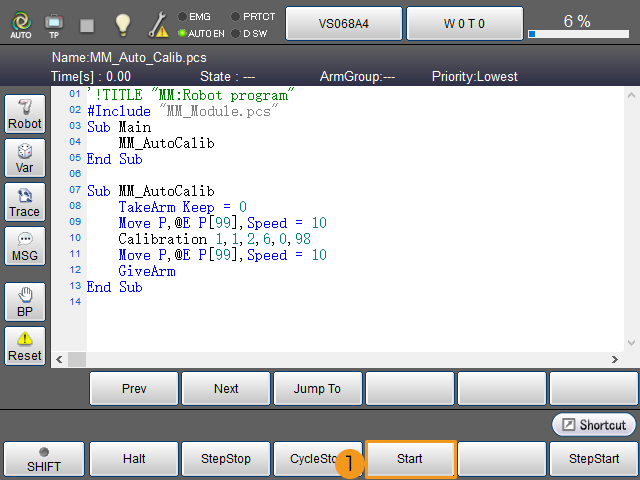
Sélectionnez la ligne où se trouve le registre de position P[99]. La ligne où se trouve le registre de position P[99] est illustrée sur la figure ci-dessous. Après avoir sélectionné la ligne, le curseur clignotant apparaît quelque part dans la ligne (le curseur peut clignoter à différents emplacements dans la ligne selon l’endroit où l’opération de sélection a lieu). Cela indique que la ligne est sélectionnée.
-
Le registre de position P[99] stocke la pose du point de départ.
-
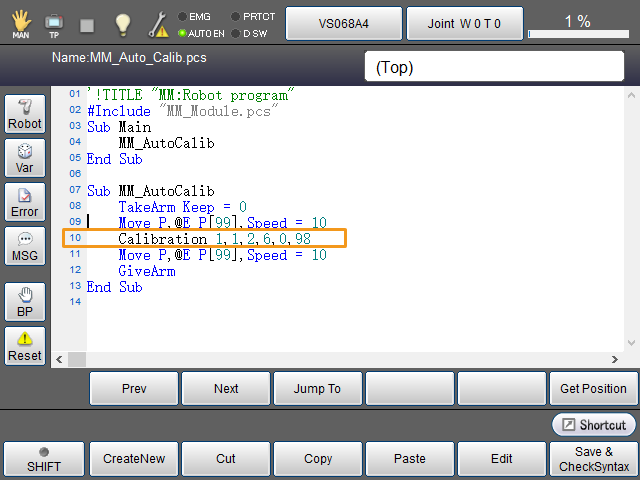
La ligne qui comprend le mot Calibration affichée dans la figure ci-dessous indique une commande d’étalonnage où la valeur du dernier paramètre représente l’ID du registre qui contient les données de pose du point de départ de l’étalonnage. Vous pouvez modifier la valeur du dernier paramètre en fonction des besoins réels. La valeur du dernier paramètre dans cette commande d’étalonnage est 98, ce qui indique que les données de pose du point de départ de l’étalonnage sont enregistrées dans un registre numéro 98. Pour plus de détails sur les autres paramètres de la commande d’étalonnage, voir la description de la commande d’étalonnage.
-
-
Déplacez manuellement le robot vers le point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
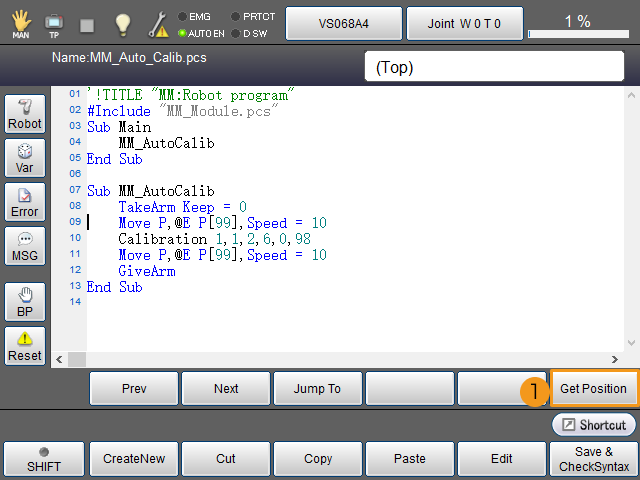
Sélectionnez Obtenir la position.
-
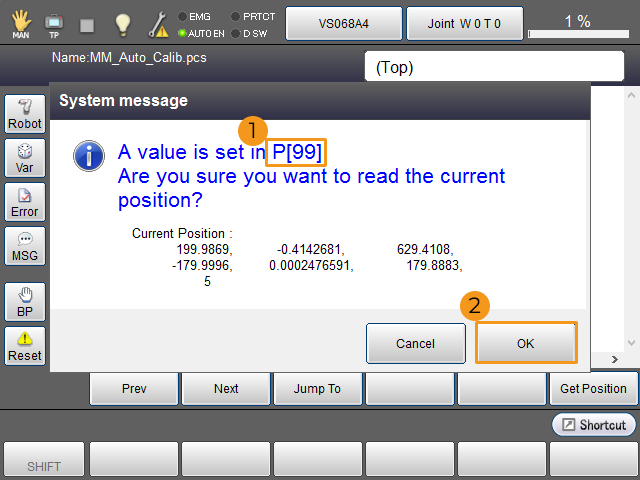
Dans la boîte de dialogue contextuelle, confirmez que la valeur du registre de position P[99] a été modifiée, puis sélectionnez OK.
3. Exécuter le programme d’étalonnage
-
Tournez la clé du boîtier d’apprentissage sur AUTO (le mode automatique). Appuyez sur la touche MOTEUR. Le voyant de la touche MOTEUR devient vert, ce qui indique que le servomoteur du robot est sous tension.
-
Dans l’interface du programme, sélectionnez Démarrer.
-
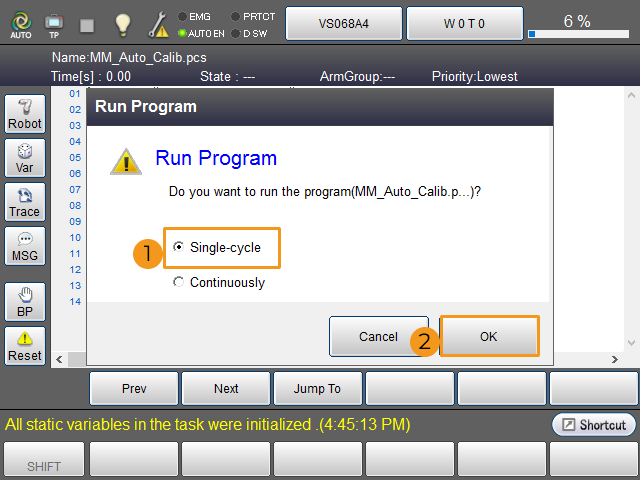
Sélectionnez Cycle unique dans la boîte de dialogue contextuelle et sélectionnez OK.
-
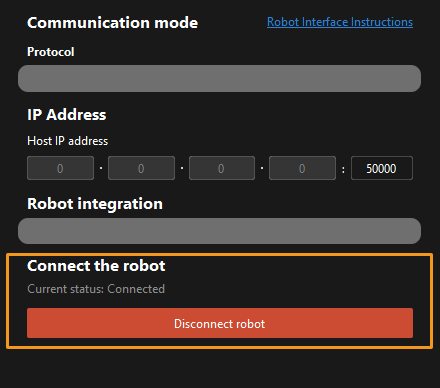
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-