Modes de communication
Après avoir configuré le matériel pour Mech-Mind Vision System, choisissez le mode permettant au système de vision de communiquer avec des dispositifs externes (tels que des robots, des API ou des ordinateurs hôtes). Cette communication vous aide à gérer l’échange de données entre les deux parties. Mech-Mind Vision System prend en charge trois modes de communication :
| La communication d’interface standard et la communication par adaptateur appartiennent toutes deux à la catégorie de la communication par interface. |
Communication maître-contrôle
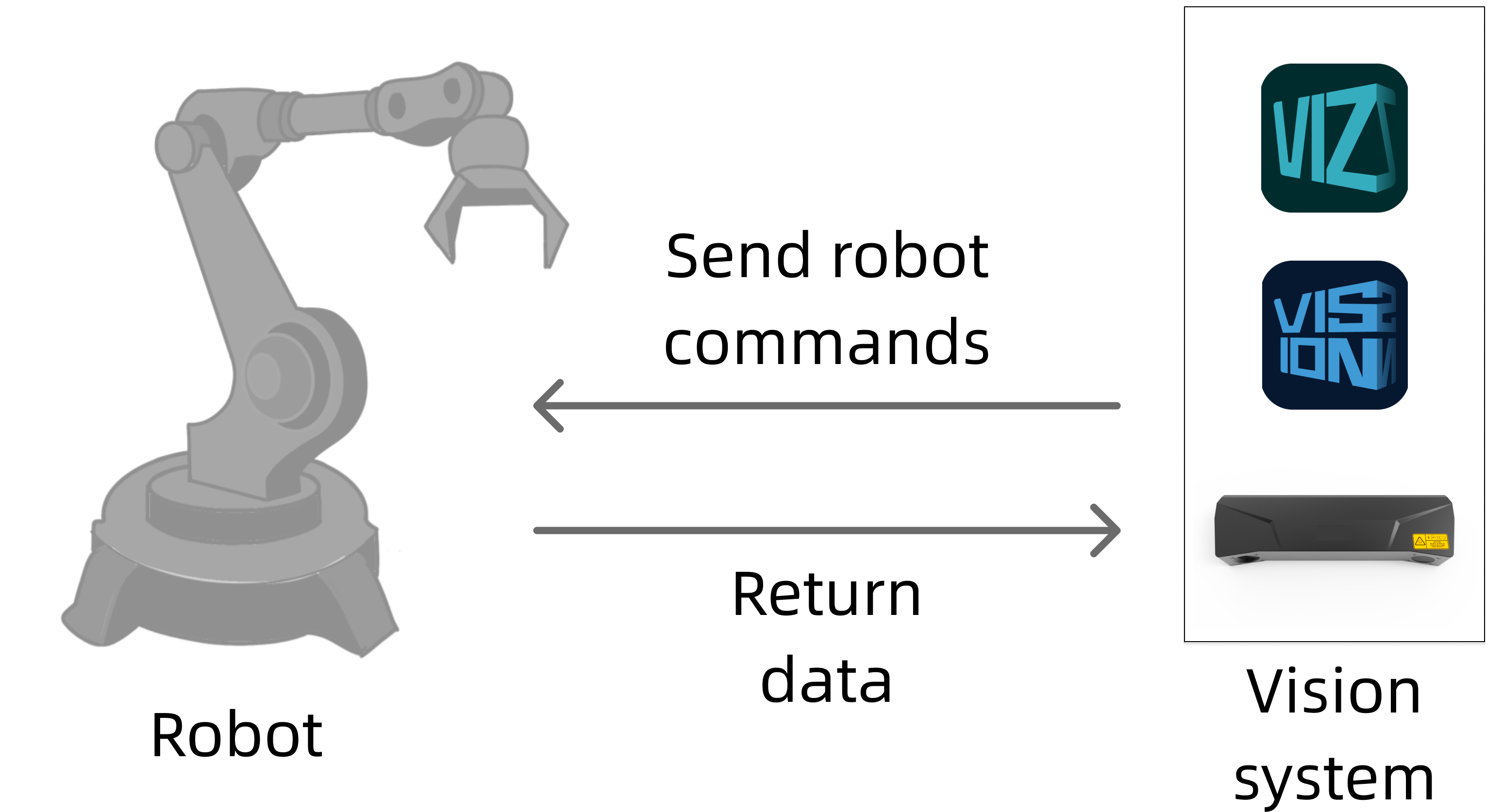
La communication maître-contrôle permet au système de vision de piloter le robot pour exécuter des tâches. Dans ce cas, le système de vision agit en tant que contrôleur et le robot en tant que partie contrôlée. Plus précisément, dans la communication maître-contrôle, le système de vision envoie des commandes au robot et le robot écoute, reçoit puis exécute les commandes. La figure suivante illustre ce processus.
|
La communication maître-contrôle peut être mise en œuvre de deux manières :
-
Mise en œuvre nécessitant un chargement.
Dans cette méthode d’implémentation, le système de vision contrôle le robot uniquement si des programmes de maître-contrôle sont chargés sur le robot et si le robot exécute ces programmes pendant tout le processus de communication. Les robots ABB, FANUC, KUKA utilisent cette méthode pour implémenter la communication maître-contrôle.
-
Mise en œuvre sans chargement.
Cette méthode d’implémentation bascule le robot en mode contrôle à distance et permet au système de vision d’utiliser les SDK du robot pour le contrôler sans avoir besoin de charger et d’exécuter des programmes de maître-contrôle sur le robot. Les robots AE et JAKA utilisent cette méthode pour implémenter la communication maître-contrôle.
Communication d’interface standard
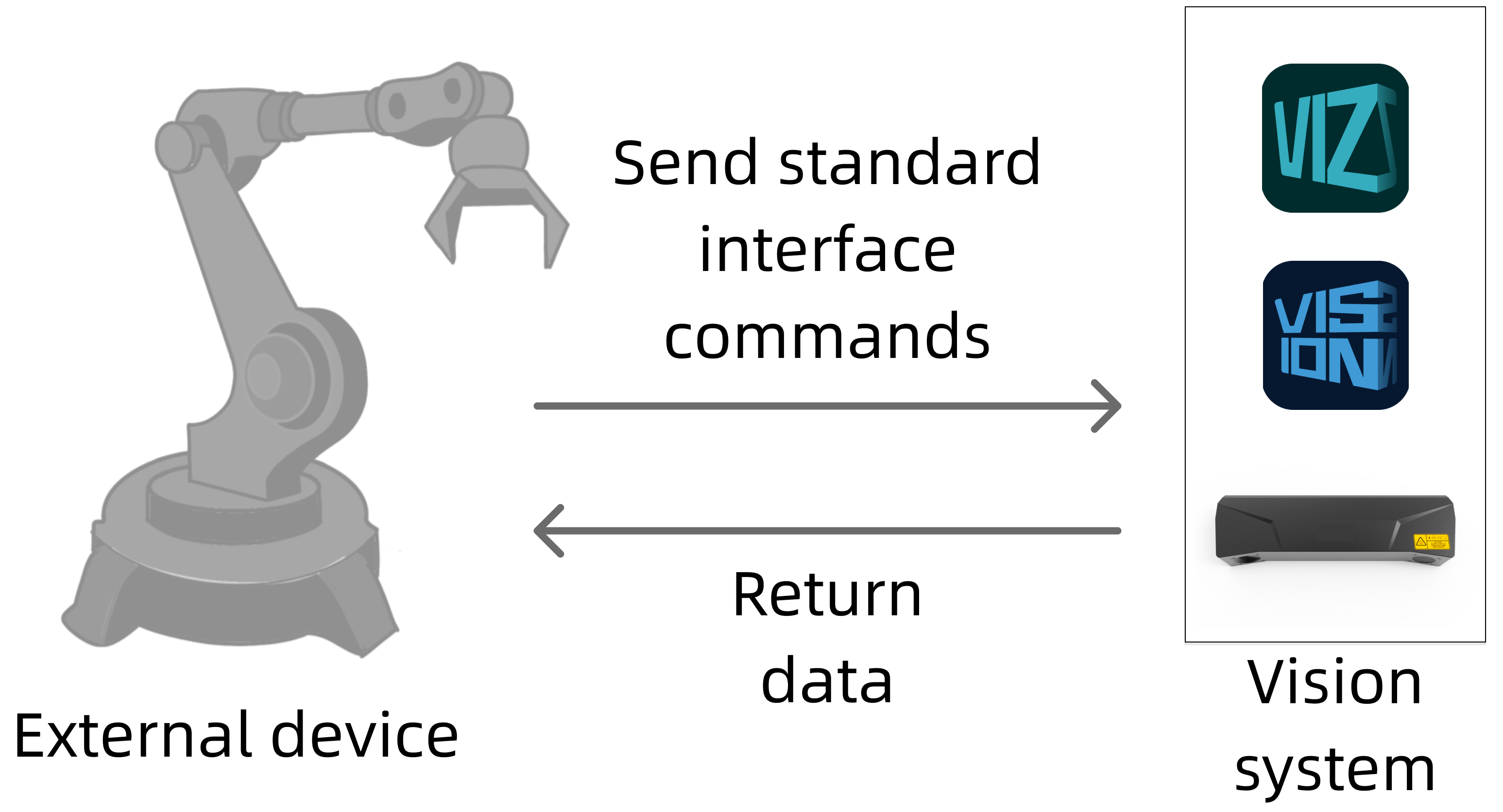
Si une communication d’interface standard est établie entre le système de vision et un dispositif externe (tel qu’un robot, une API ou un ordinateur hôte), le dispositif externe envoie des commandes d’interface standard au système de vision et le système de vision renvoie des données à la réception des commandes. La figure suivante illustre le processus. Dans la communication d’interface standard, le système de vision n’envoie des données qu’en réponse aux commandes du dispositif externe et ne contrôle pas le dispositif externe. Pour cette raison, vous devez écrire des programmes pour un dispositif externe afin de permettre à celui-ci de communiquer avec le système de vision.
|
Développées par Mech-Mind sur la base du protocole de communication standard, les commandes d’interface standard définissent les formats de requête et de réponse. Ces commandes d’interface standard configurent les projets Mech-Vision et Mech-Viz et renvoient les résultats pour les projets Mech-Vision et Mech-Viz. |
Vous pouvez établir la communication d’interface standard de l’une des deux manières suivantes :
-
Si votre appareil éternel est pris en charge par Mech-Mind Vision System, vous pouvez utiliser directement les commandes d’interface standard. Pour plus d’informations, voir Communication d’interface standard.
-
Si votre dispositif externe n’est pas pris en charge par Mech-Mind Vision System, rédigez des commandes d’interface standard sur la base du Manuel de développement de l’interface standard pour utiliser la communication d’interface standard.
Communication par adaptateur
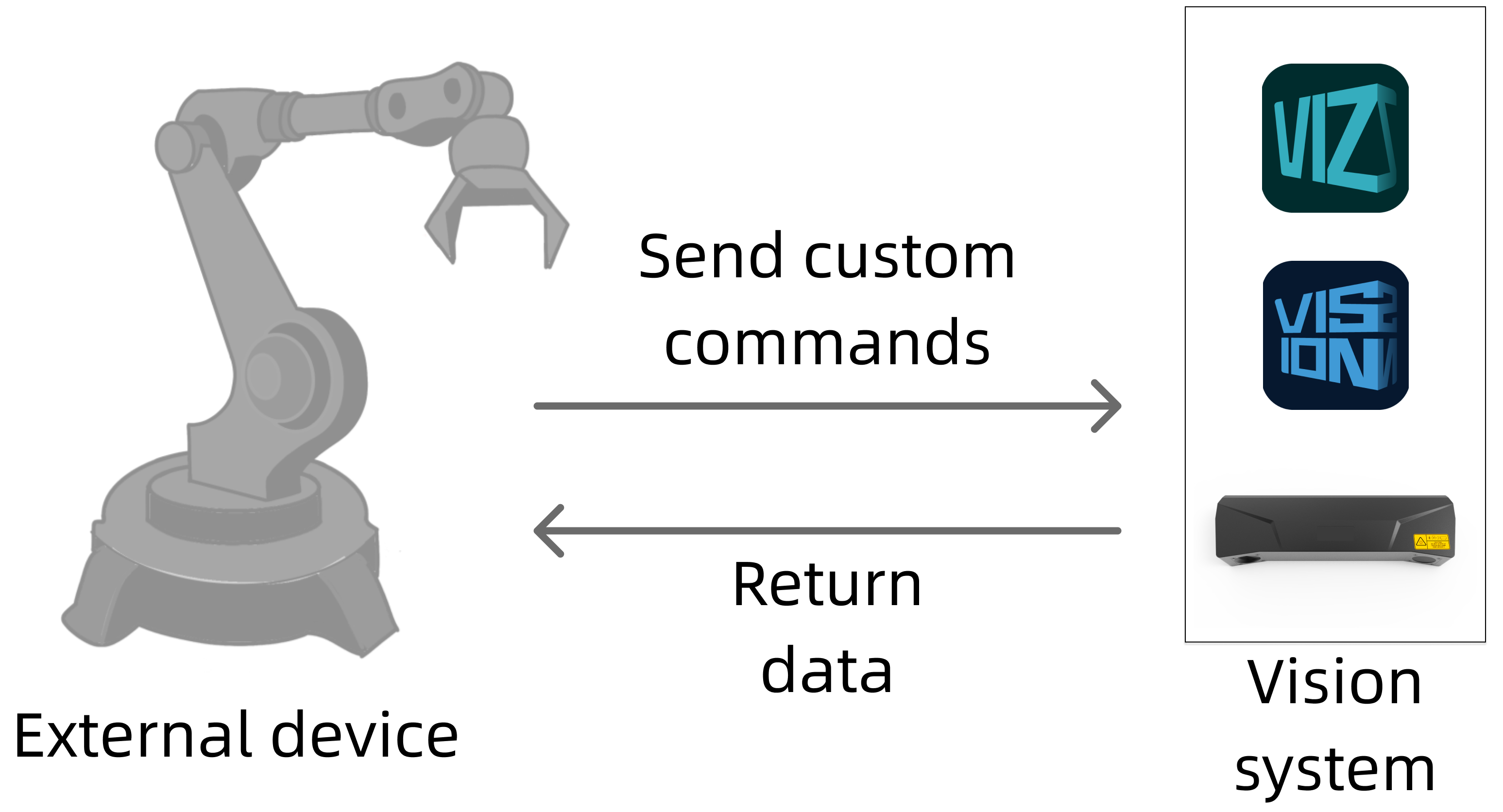
Si une communication par adaptateur est établie entre le système de vision et un dispositif externe (tel qu’un robot, une API ou un ordinateur hôte), le dispositif externe envoie des commandes personnalisées au système de vision et le système de vision renvoie des données à la réception des commandes. La figure suivante illustre le processus. Dans la communication par adaptateur, les deux parties doivent déterminer les commandes personnalisées à utiliser. Pour cette raison, vous devez écrire des programmes pour le dispositif externe et pour le système de vision.
|
Vous pouvez établir la communication par adaptateur en utilisant Python de l’une des manières suivantes :
-
Utilisez Guide du générateur d’adaptateur pour configurer la syntaxe de commandes utilisée par les deux parties pour la communication. Si les commandes générées ne répondent pas à vos exigences, écrivez en Python d’autres commandes qui correspondent à vos besoins.
-
Écrivez, à partir de zéro, la syntaxe de commandes utilisée par les deux parties pour la communication sur la base du Guide de programmation de l’adaptateur.
Comparaison entre les modes de communication
Après la présentation de base précédente des trois modes de communication, cette section compare les modes de communication et résume les caractéristiques et les scénarios d’application de chaque mode pour faciliter votre compréhension.
Premièrement, les modes de communication diffèrent par les commandes envoyées et reçues par les deux parties de la communication. Le tableau suivant décrit ces différences.
| Mode de communication | Type de commande | Émetteur de la commande | Récepteur de la commande |
|---|---|---|---|
Communication maître-contrôle |
Commandes du robot |
Système de vision |
Robot |
Communication d’interface standard |
Commandes d’interface standard |
Périphériques externes (robots, API ou ordinateurs hôtes) |
Système de vision |
Communication par adaptateur |
Commandes personnalisées |
Périphériques externes (robots, API ou ordinateurs hôtes) |
Système de vision |
Deuxièmement, les trois modes de communication diffèrent par les protocoles pris en charge, la difficulté d’utilisation et la flexibilité. La figure suivante montre les différences.
| Mode de communication | Protocole pris en charge | Programme | Difficulté d’utilisation | Flexibilité |
|---|---|---|---|---|
Communication maître-contrôle |
TCP et UDP |
Aucun programme n’est nécessaire |
Faible |
Faible |
Communication d’interface standard |
TCP UDP Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC |
Des programmes doivent être écrits pour les périphériques externes |
Moyenne |
Moyenne |
Communication par adaptateur |
TCP UDP HTTP WebSocket Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC Autres protocoles de communication |
Des programmes doivent être écrits pour le système de vision et les périphériques externes |
Élevée |
Élevée |
Troisièmement, les trois modes de communication diffèrent par les scénarios pris en charge.
| Mode de communication | Chargement de pièces | Palettisation et dépalettisation | Localisation et assemblage | Préhension de pièces | Collage |
|---|---|---|---|---|---|
Communication maître-contrôle |
√ |
√ |
√ |
√ |
√ |
Communication d’interface standard |
√ |
√ |
√ |
√ |
× |
Communication par adaptateur |
√ |
√ |
√ |
√ |
√ |
Après vous être familiarisé avec les trois modes de communication, vous pouvez sélectionner un mode de communication adapté à vos besoins réels.