Opérations de base Kawasaki
Ce sujet présente quelques opérations de base des robots Kawasaki.
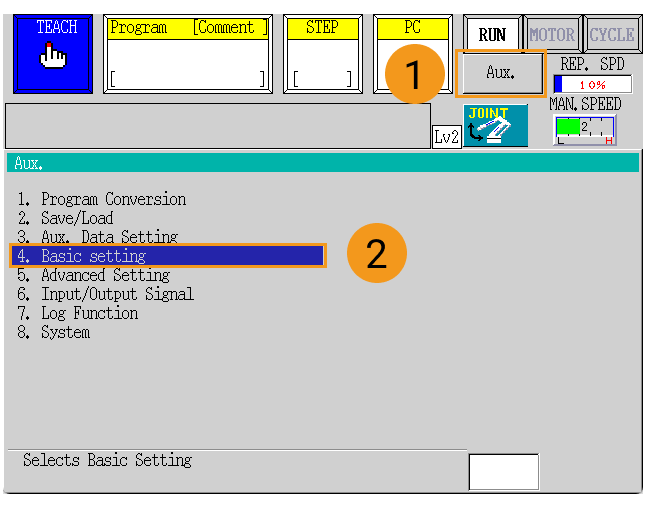
Définir la position HOME
-
Sélectionnez .
-
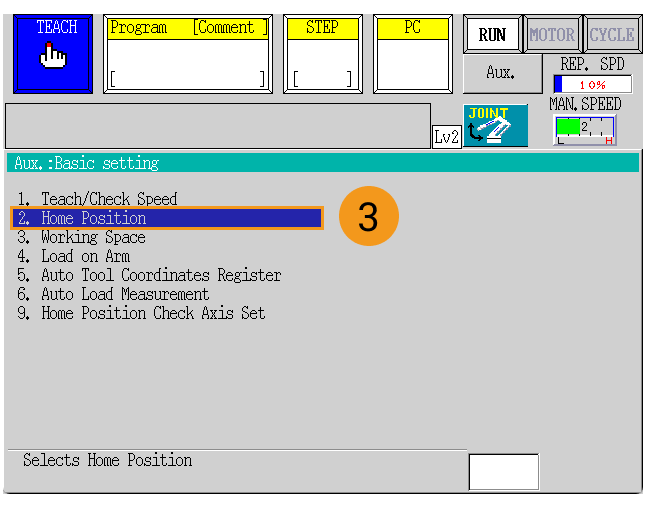
Appuyez sur 2. Home Position.
-
Sélectionnez la case Key Entry, définissez les degrés de toutes les articulations à la position HOME, puis appuyez sur la touche
Entréepour confirmer. Le message « Paramétrage terminé » s’affichera en bas.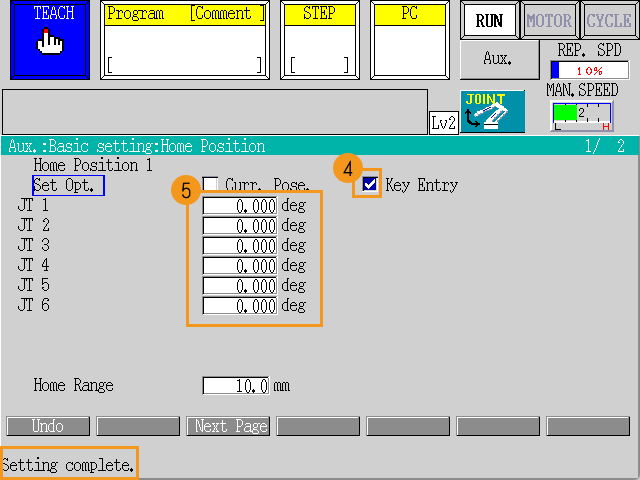
Sinon, vous pouvez contrôler manuellement le robot réel pour le déplacer vers la position HOME souhaitée, sélectionner la case Curr. Pose. puis appuyer sur la touche Entrée.
Définir le TCP du robot
-
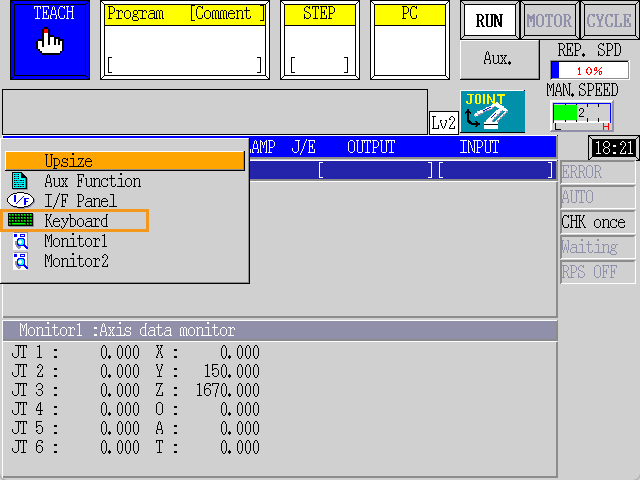
En mode TEACH, appuyez sur la zone vide au centre.
-
Dans la liste déroulante affichée, sélectionnez Keyboard.
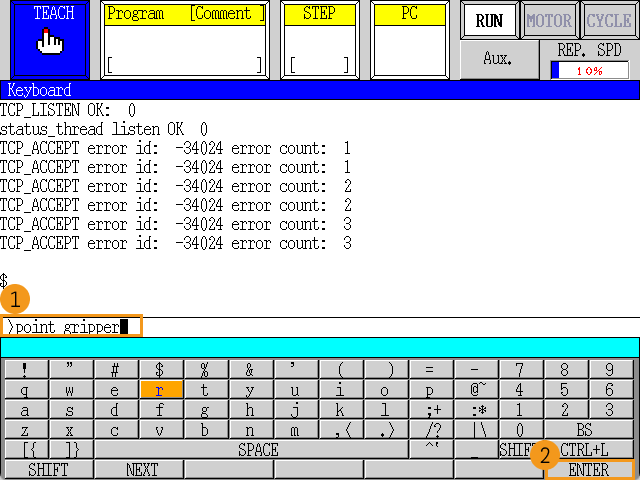
-
Saisissez point gripper à l’aide du clavier, puis appuyez sur la touche Entrée du clavier.
-
Saisissez la pose du TCP du robot à l’aide du clavier, par exemple 0,0,200, puis appuyez sur la touche Entrée du clavier.
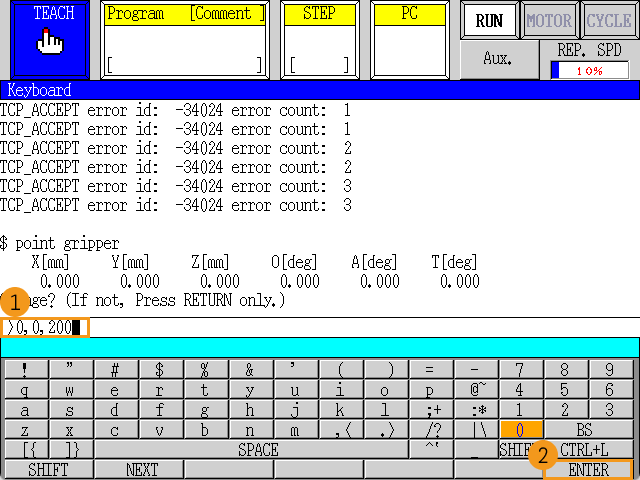
-
Appuyez sur la touche Entrée, puis appuyez sur la touche
R.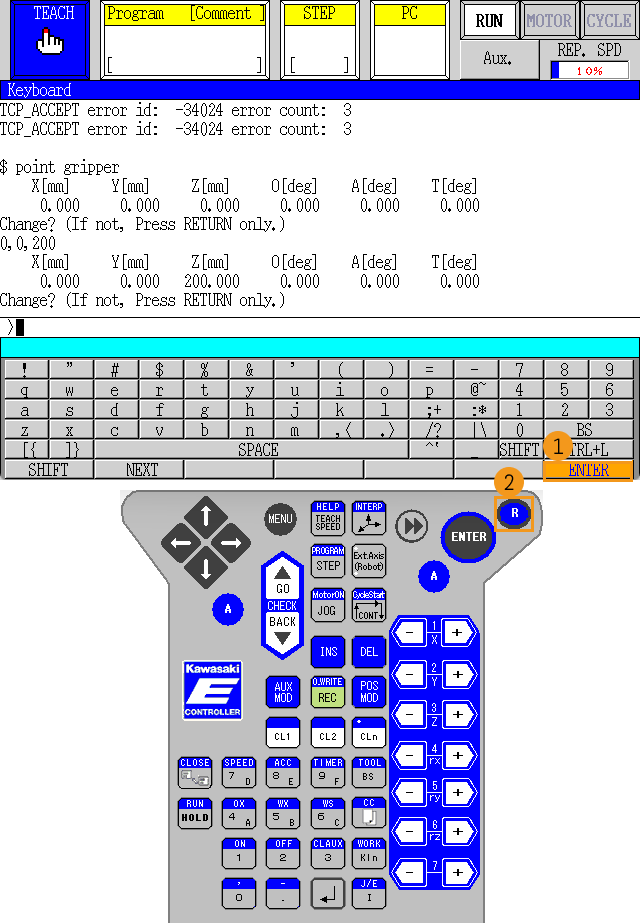
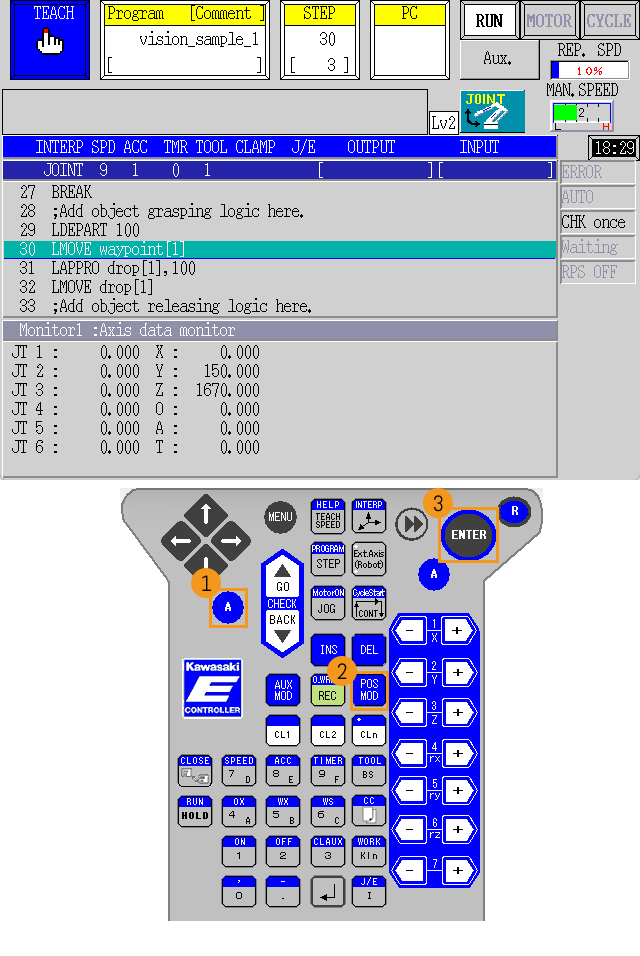
Enseigner les données de pose au robot
| Avant d’effectuer cette opération, vous devez avoir configuré la communication de l’Interface standard. |
Le contenu suivant montre comment enseigner des données de pose au robot en utilisant la ligne 31 lmove waypoint[1] dans le programme d’exemple qui obtient le résultat de vision depuis Mech-Vision à titre d’exemple.
-
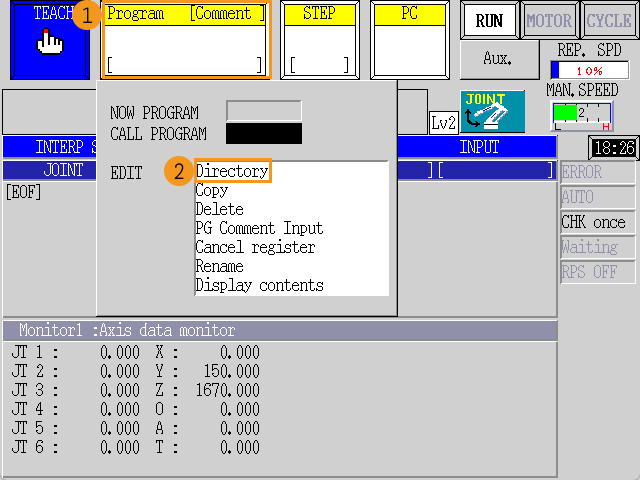
En mode TEACH, appuyez sur la zone Program, puis appuyez sur Directory.
-
Sur la page Directory, appuyez sur Page suivante pour trouver et sélectionner le programme d’exemple vision_sample_1, puis appuyez sur la touche
Entréedu boîtier d’enseignement pour confirmer.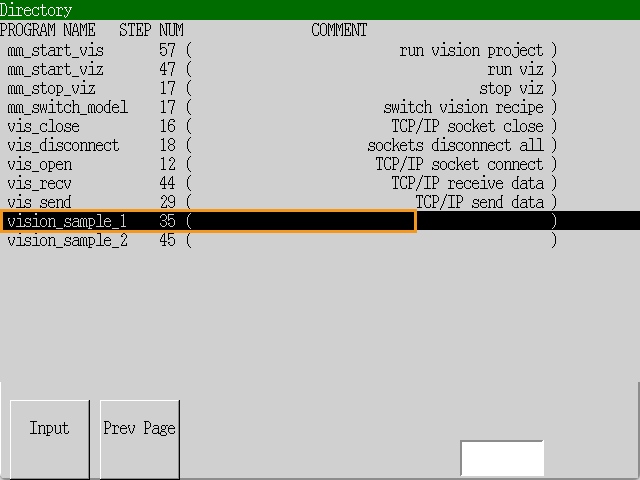
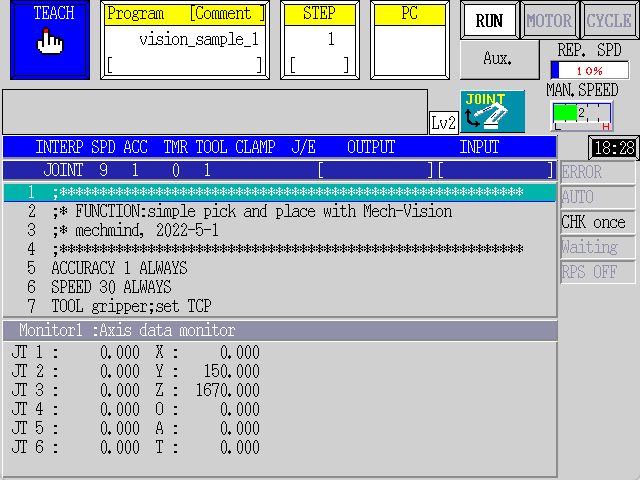
La figure suivante montre l’interface après l’ajout du programme.
-
Appuyez sur la zone STEP, saisissez 30 à l’aide du clavier du boîtier d’enseignement pour CALL STEP, puis appuyez sur la touche
Entréepour confirmer. Cela mettra en surbrillance la ligne 30 à l’écran.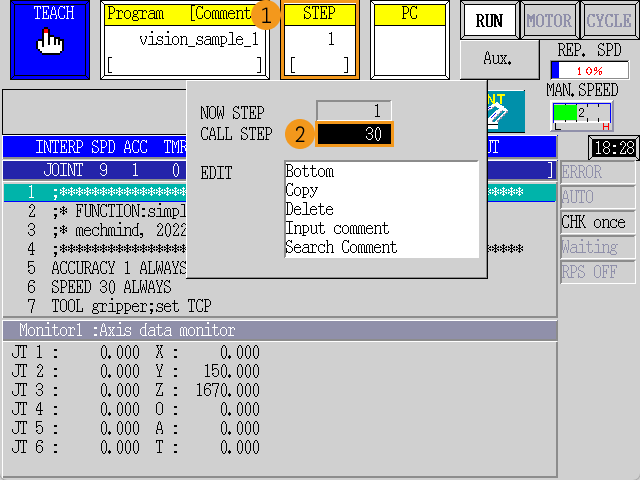
-
Déplacez manuellement le robot réel vers la position enseignée, appuyez sur les touches
A+POS MOD, puis appuyez sur la toucheEntréepour confirmer. Maintenant, la valeur de waypoint[1] a été remplacée par les données de pose de la position enseignée.