Configuration de la communication Master-Control (Robot industriel)
Ce guide explique comment configurer la communication Master-Control avec un robot industriel ROKAE.
Préparation
Vérifier les versions matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Le robot utilisé est un robot industriel ROKAE.
-
La série du contrôleur est XBC3 (XBC5 n’est pas prise en charge) et la version est 3.6.
Démarrer le robot et le pupitre de commande
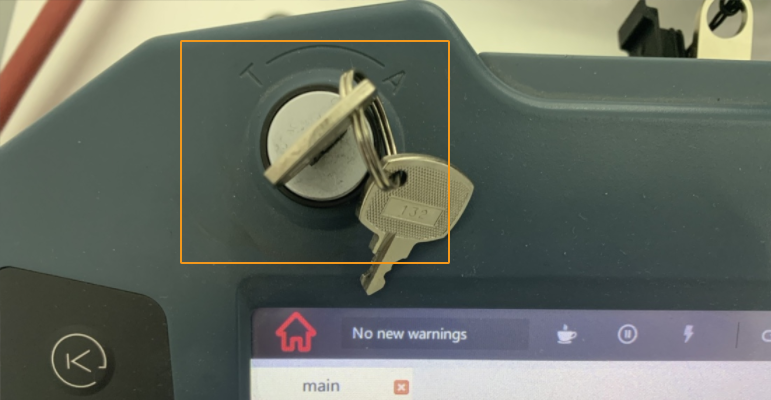
Allumez le contrôleur à l’aide de son interrupteur d’alimentation, comme montré ci-dessous. Si le contrôleur a démarré avec succès, une interface de bienvenue apparaît sur le pupitre de commande.

Vérifier la version du contrôleur
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Aide pour vérifier la version.

Passer le type d’utilisateur à Admin
Un utilisateur opérateur n’a pas les droits pour gérer des fichiers ou effectuer des opérations. Veuillez donc passer à l’utilisateur admin.
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur , et sélectionnez admin.
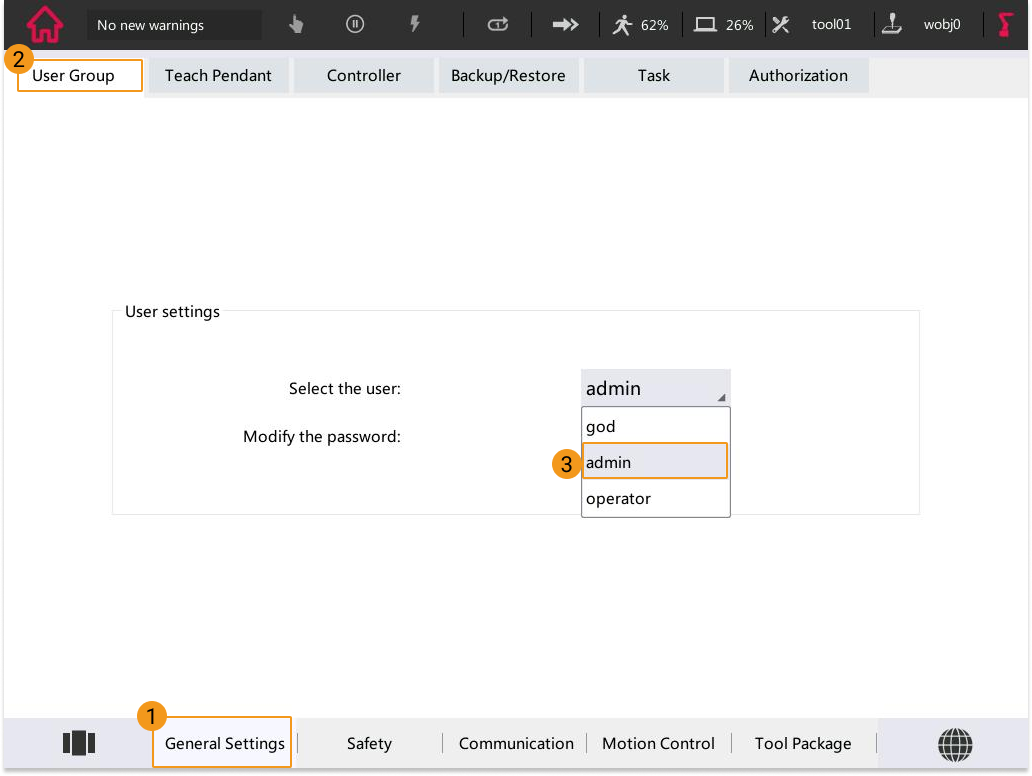
-
Saisissez le mot de passe 123456 dans la fenêtre contextuelle.
Configurer la connexion réseau
Connecter le matériel
Utilisez le câble Ethernet pour connecter les ports réseau de l’IPC et du contrôleur du robot.

Configurer la communication externe
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur , configurez la communication Socket comme montré dans la figure ci-dessous, puis cliquez sur Connecter.
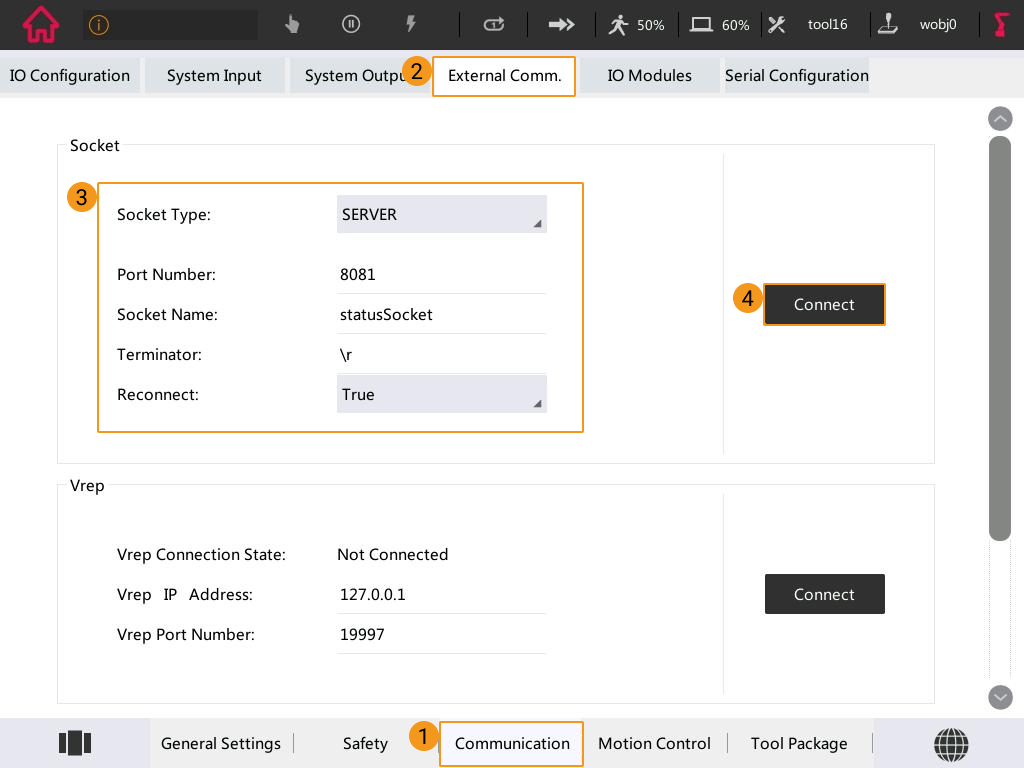
-
Redémarrez le contrôleur.
Définir l’adresse IP
L’adresse IP par défaut du robot ROKAE pour communiquer avec le système de vision est 192.168.2.160, qui ne peut pas être modifiée pour l’instant. Cependant, vous pouvez modifier l’adresse IP de l’IPC (192.168.2.222 est utilisée dans cet exemple) afin de garantir que leurs adresses IP se trouvent dans le même sous-réseau. Veuillez vous référer à Définir l’adresse IP de l’IPC pour des instructions détaillées.
Après avoir modifié l’adresse IP sur l’IPC, ouvrez la fenêtre Invite de commandes de l’IPC, saisissez “ping 192.168.2.160”, et testez si la connexion entre l’IPC et le robot est réussie.
Préparer les fichiers de programme
-
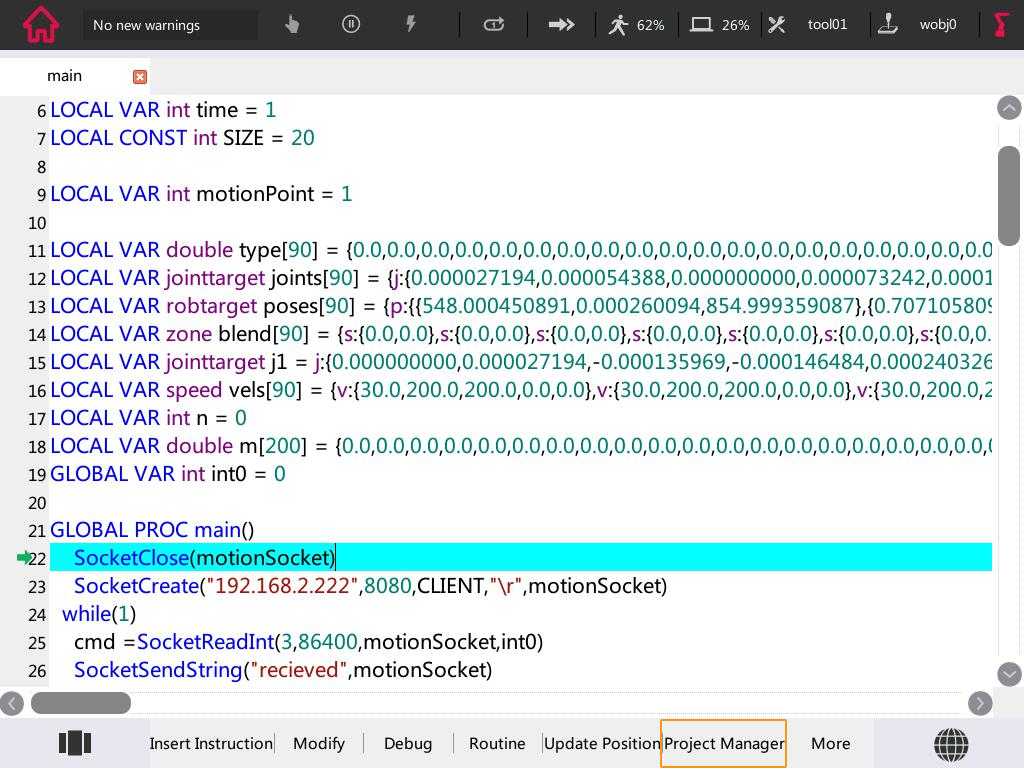
Sur l’IPC, accédez à
Communication Component/Robot_Server/Robot_FullControl/rokaedepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés.Le dossier rokae contient trois sous-dossiers :
-
singleTask5 contient des projets couramment utilisés qui prennent en charge le contrôle du mouvement du robot et la réception des DO. Dans cette section, singleTask5 est utilisé comme exemple.
-
splineCurve est une version améliorée de singleTask5. Il est spécialement développé pour les applications d’encollage. Lors de l’exécution du programme, veuillez sélectionner soit singleTask5 soit splineCurve.
-
getDIServer est un programme de service indépendant pour recevoir les DI du robot. Si vous souhaitez utiliser singleTask5 et getDIServer simultanément, la fonction multitâche doit être activée côté robot. Pour des instructions détaillées, veuillez consulter Activer le multitâche.
-
-
Branchez la clé USB sur le port USB de l’IPC. Copiez le dossier rokae sur la clé USB, puis éjectez la clé USB en toute sécurité.
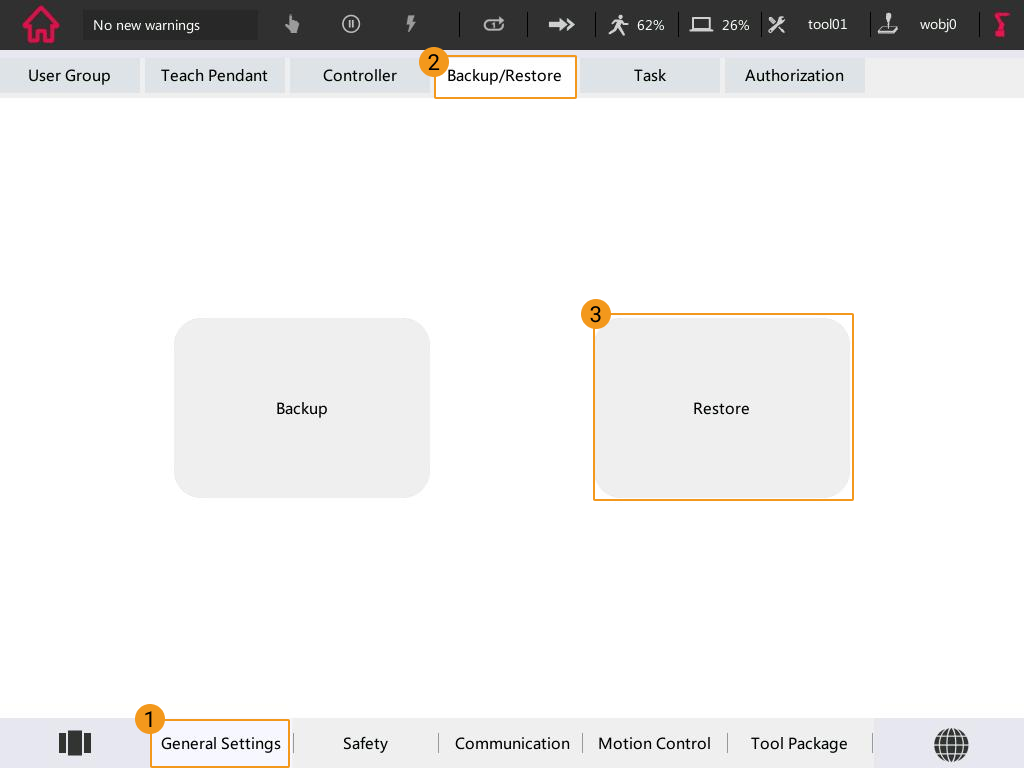
Charger les fichiers de programme sur le robot
| Il est recommandé de sauvegarder les fichiers système du robot avant de charger les fichiers du programme Master-Control afin d’éviter une corruption du système pouvant être causée par l’opération de chargement. En cas de problème, vous pouvez utiliser le fichier de sauvegarde pour restaurer le système du robot. Veuillez consulter Sauvegarder et restaurer les fichiers du robot pour des instructions détaillées. |
-
Branchez la clé USB contenant les fichiers de programme sur le port USB du contrôleur du robot.
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Projet.
-
Appuyez sur Gestionnaire de projet.
-
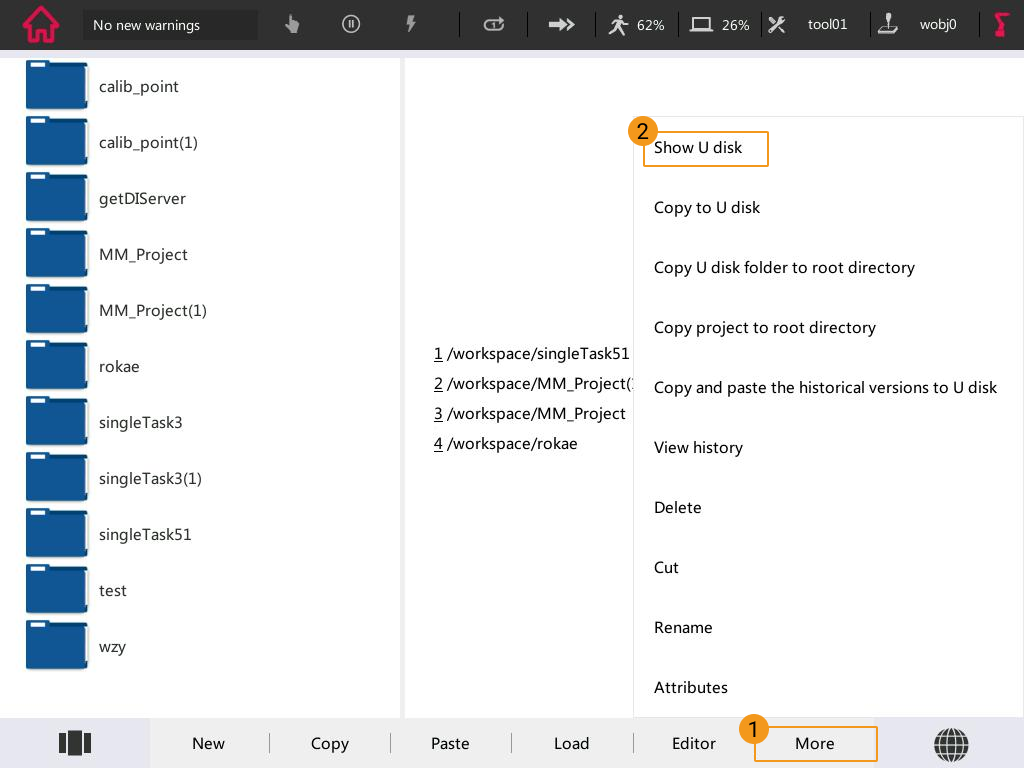
Appuyez sur Plus et sélectionnez Afficher le disque U.
-
Sélectionnez le dossier singleTask5 sur la clé USB, appuyez sur Plus, puis sélectionnez Copier le dossier du disque U vers le répertoire racine.
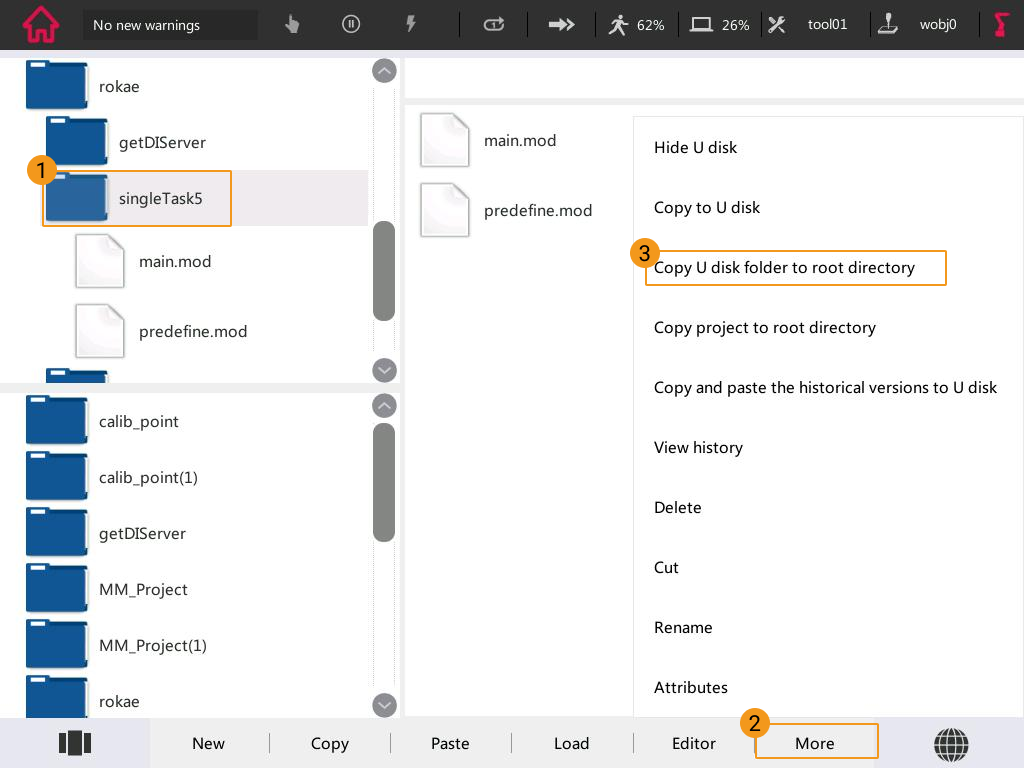
Une fois le collage effectué avec succès, le dossier singleTask5 est visible dans le navigateur de fichiers en bas à gauche.
Configurer les E/S du robot
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
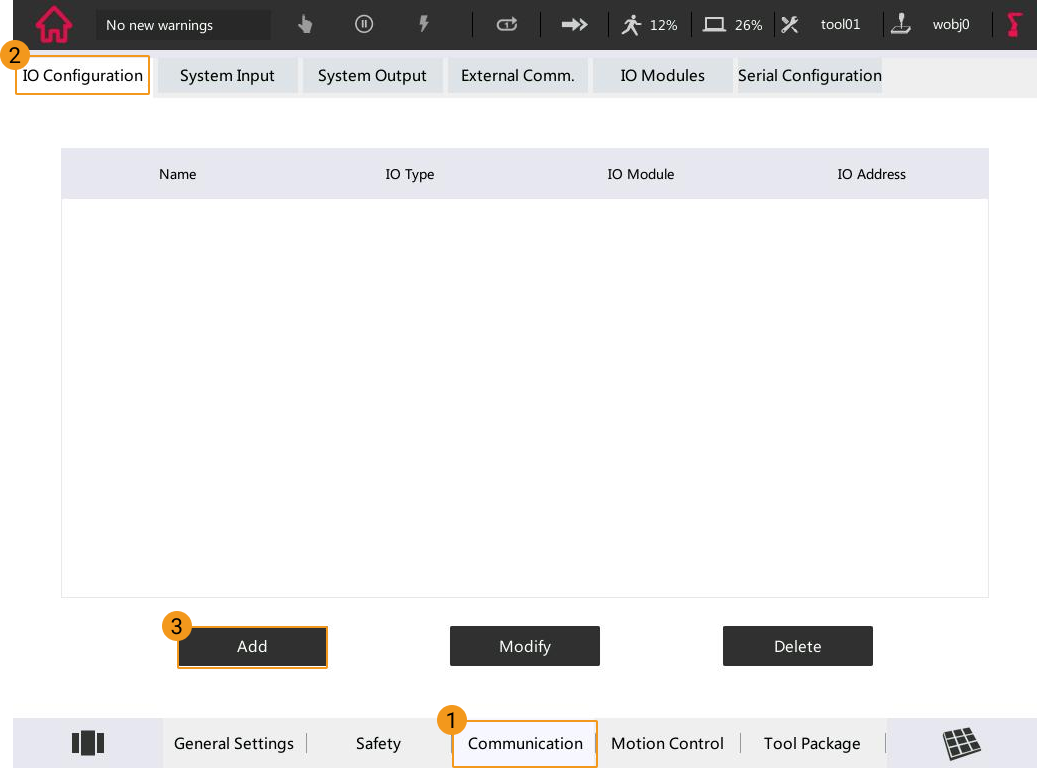
Appuyez successivement sur .
-
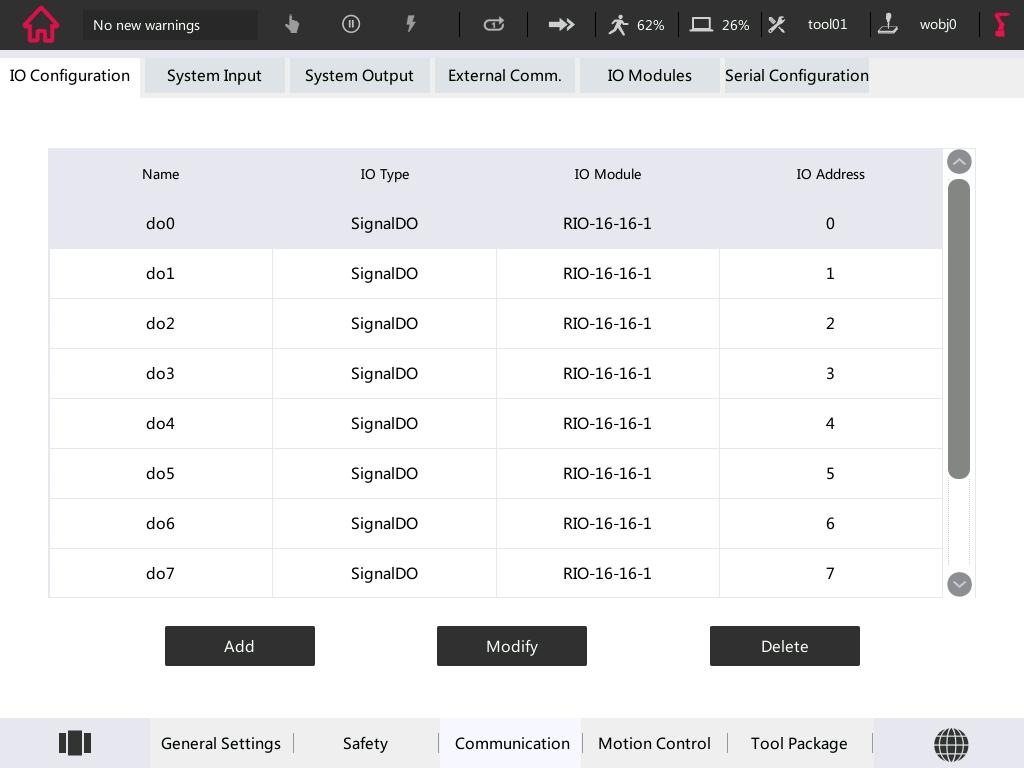
Ajoutez do0, les options spécifiques sont montrées ci-dessous.
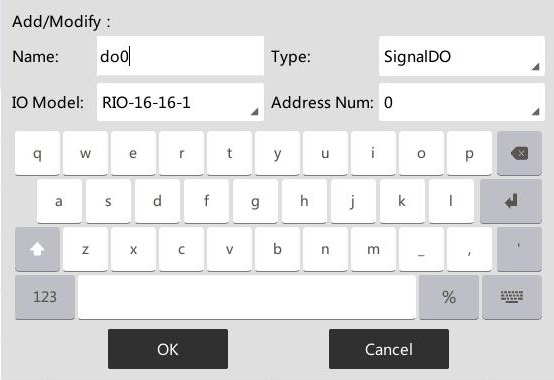
De la même manière, ajoutez do0 à do7. Le résultat final est montré dans la figure ci-dessous.
Tester la communication Master-Control
-
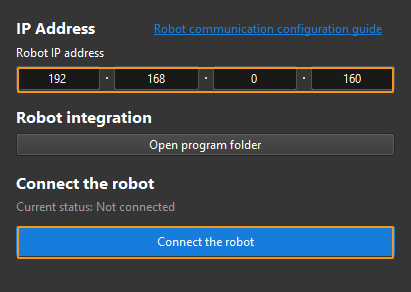
Cliquez sur Robot Master-Control dans la barre d’outils de Mech-Viz.
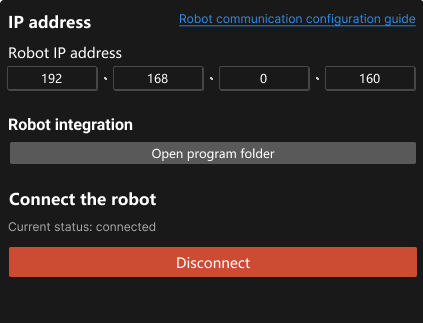
Saisissez 192.168.2.160 (valeur requise) dans Adresse IP du robot et cliquez sur Connecter le robot.
Mech-Viz attendra l’exécution du programme master-control avant d’établir la connexion. Par défaut, le temps d’attente est de 120s.
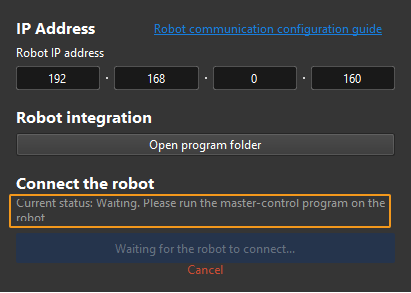
Avec les étapes suivantes, vous pouvez charger et exécuter le programme master-control. Notez que l’opération doit être terminée en 120s. Sinon, vous devrez cliquer à nouveau sur Connecter le robot dans Mech-Viz.
-
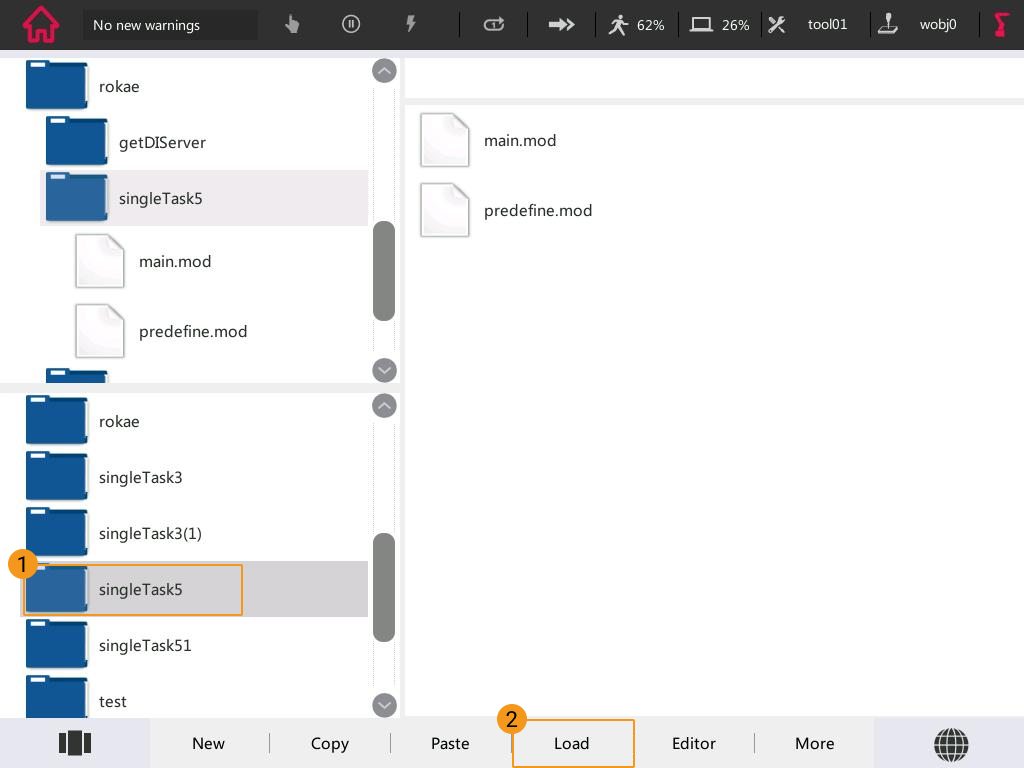
Sélectionnez le dossier local singleTask5, puis appuyez sur Charger.
-
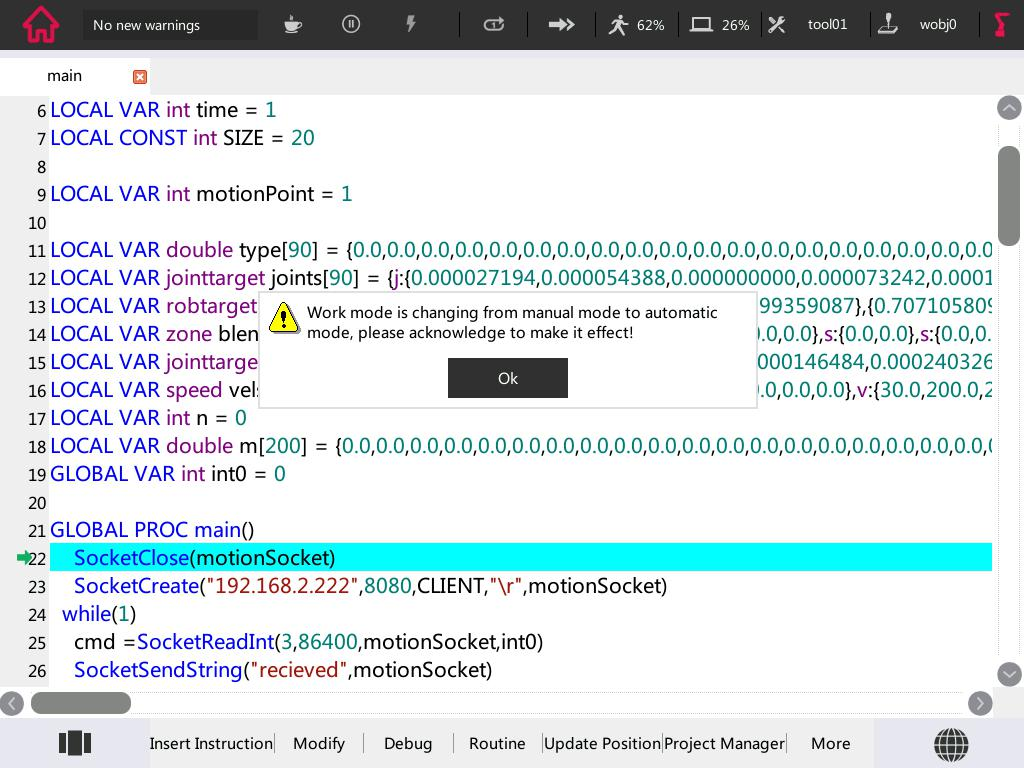
Basculez le mode manuel en mode automatique. La figure ci-dessous montre le pupitre de commande en mode automatique.
Sélectionnez Ok dans la fenêtre contextuelle comme montré ci-dessous.
-
Appuyez sur le bouton du contrôleur comme montré dans la figure ci-dessous. Si le voyant clignotant devient fixe, le servo est activé avec succès en mode automatique.

-
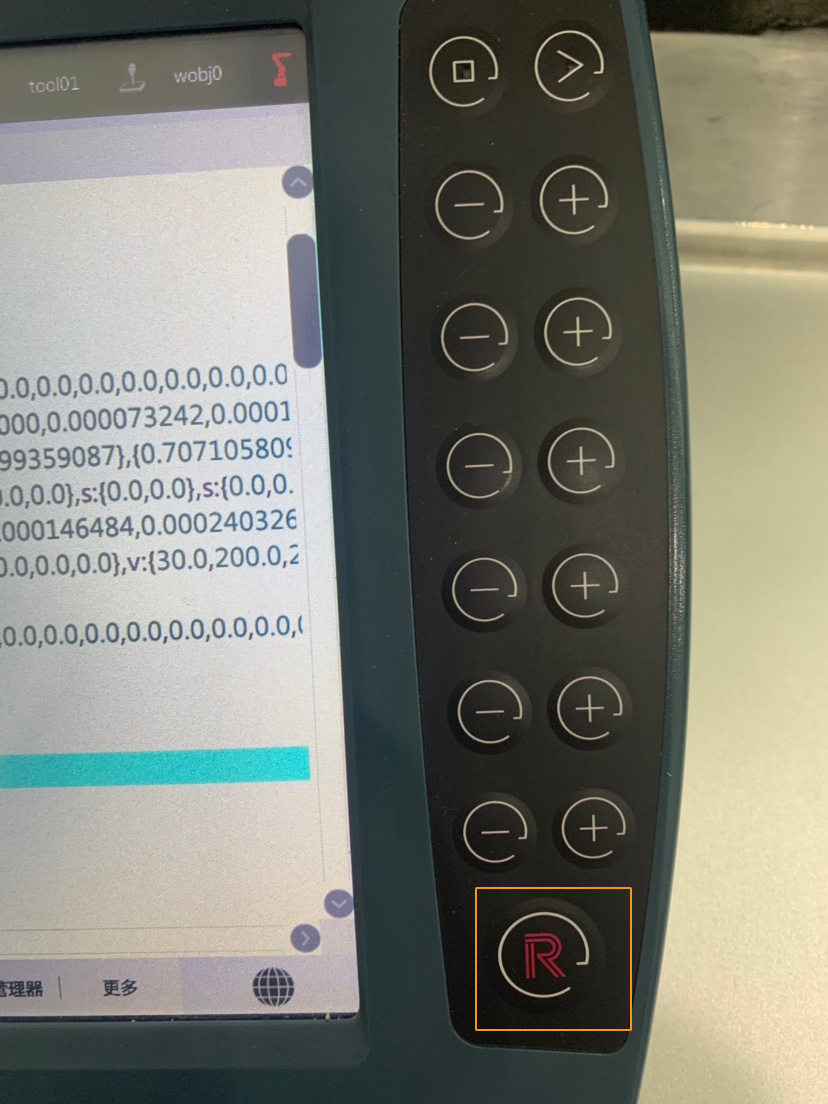
Appuyez sur le bouton R dans le coin inférieur droit pour mettre le robot sous tension.
-
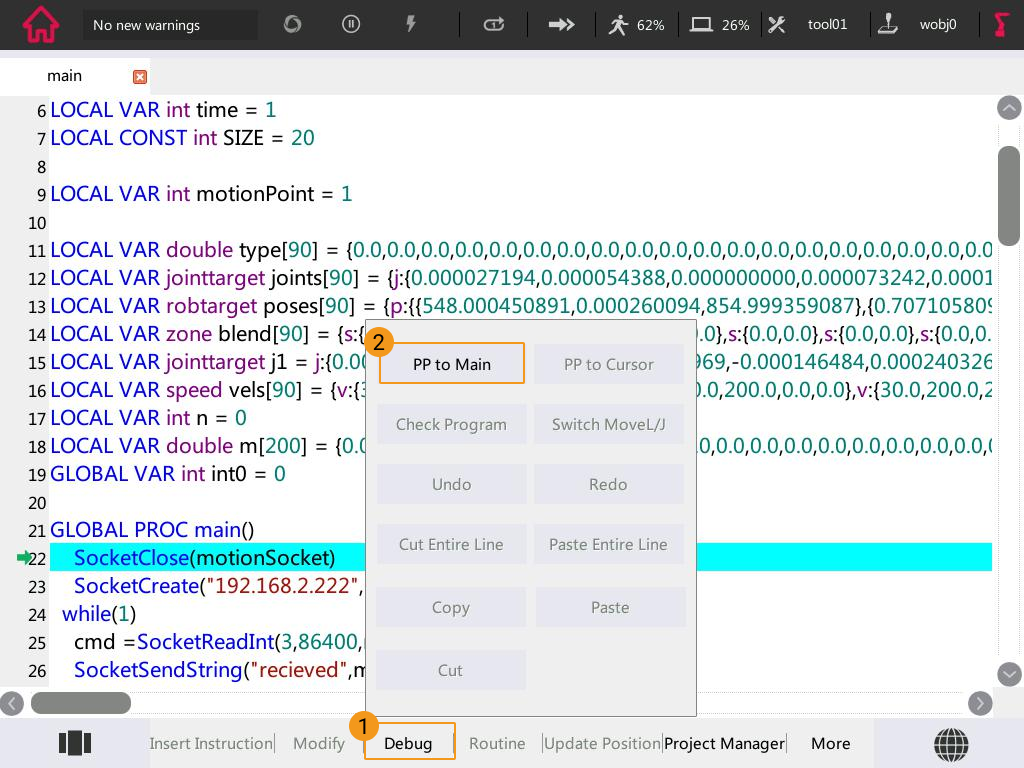
Appuyez sur Débogage et sélectionnez PP vers Main.
-
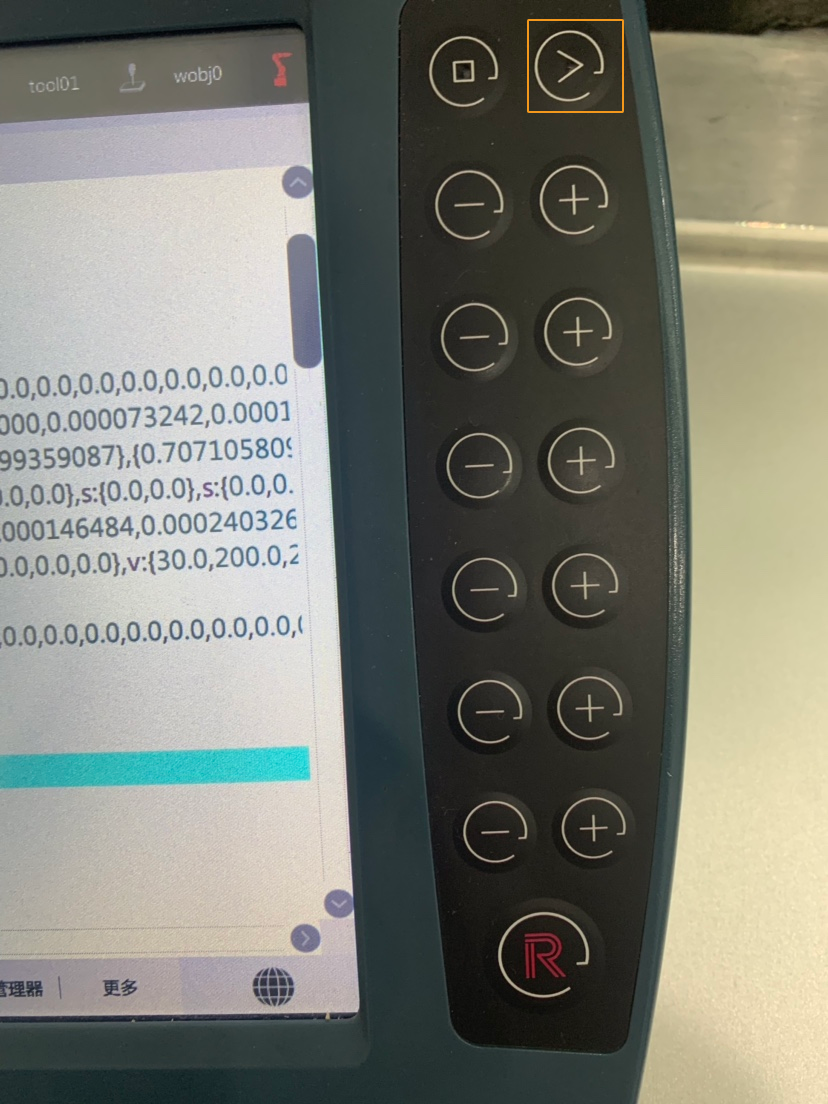
Cliquez sur l’icône illustrée ci-dessous pour régler la vitesse d’exécution du programme.

-
Appuyez sur le bouton montré ci-dessous pour exécuter le programme.
Dans Mech-Viz, l’état actuel affiche « connecté ».
Après avoir terminé l’opération ci-dessus, veuillez déplacer le robot.
Opérations courantes
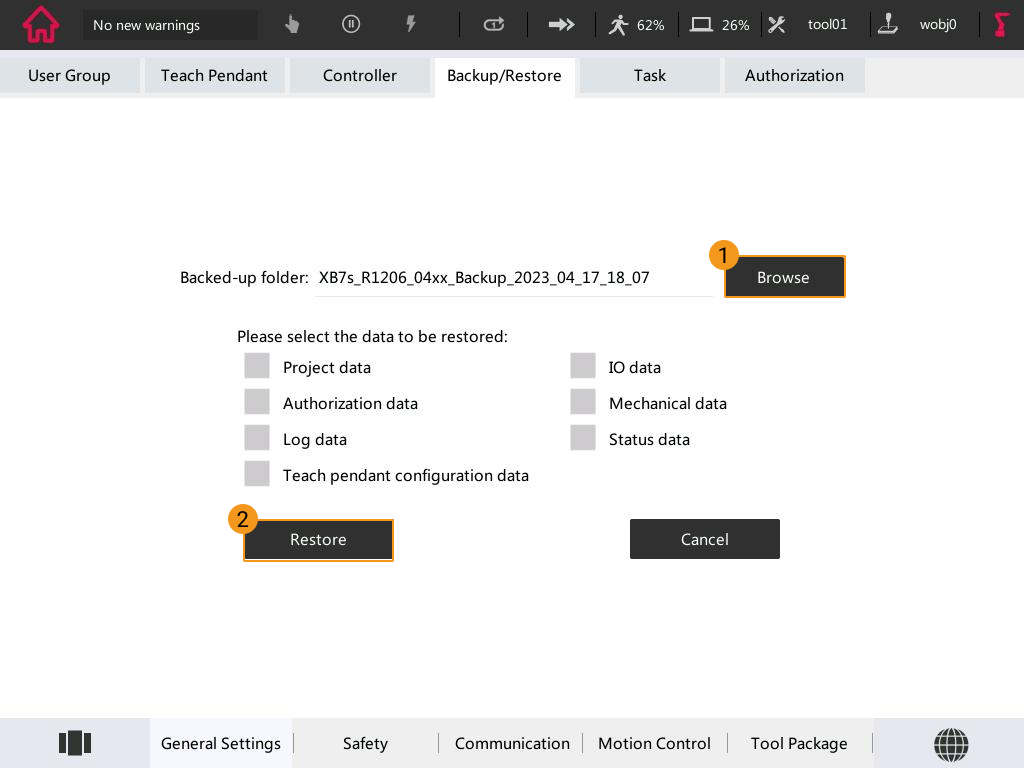
Sauvegarde et restauration des fichiers du robot
Sauvegarde
-
Branchez la clé USB contenant les fichiers de programme sur le port USB du contrôleur du robot.
-
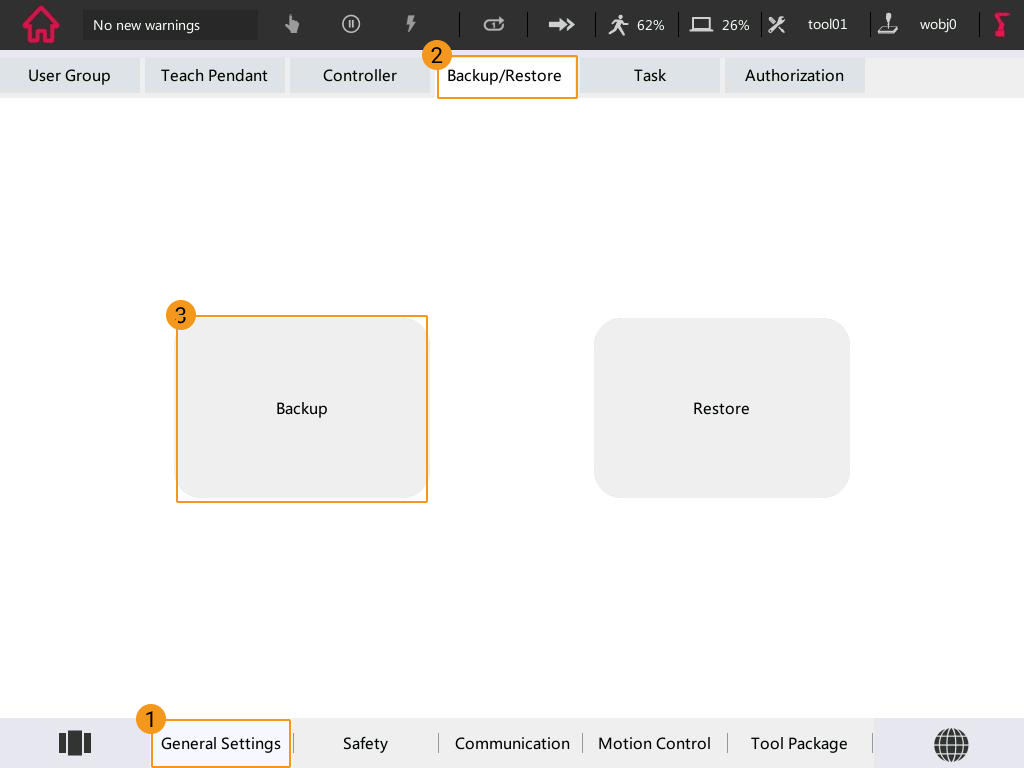
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
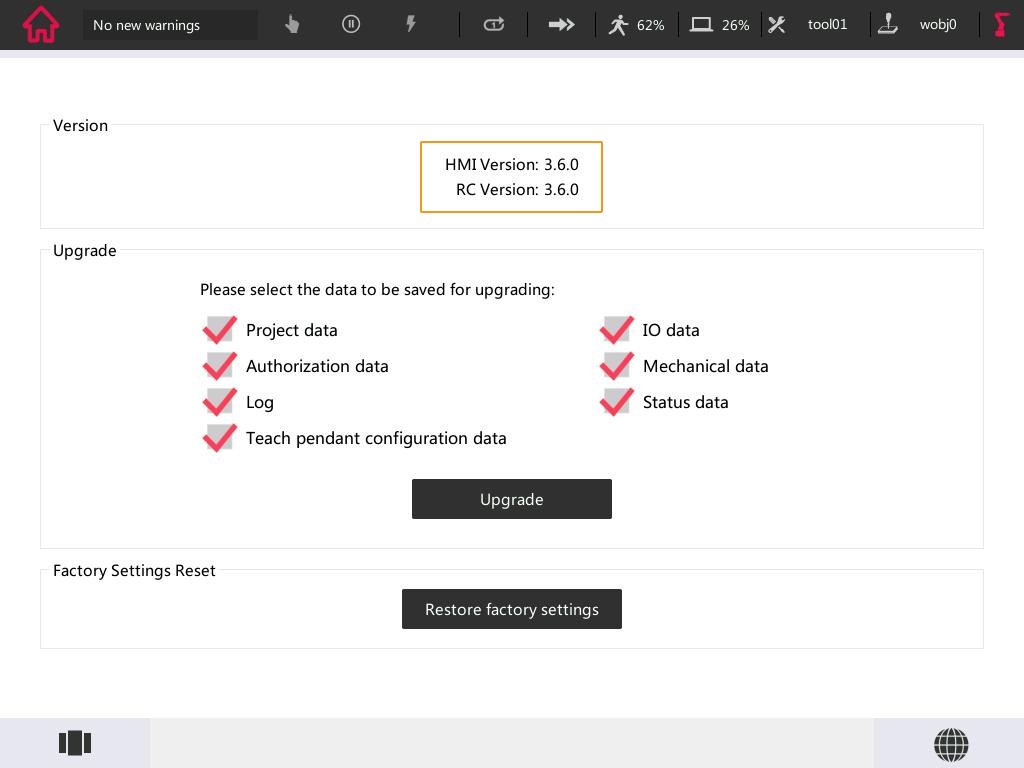
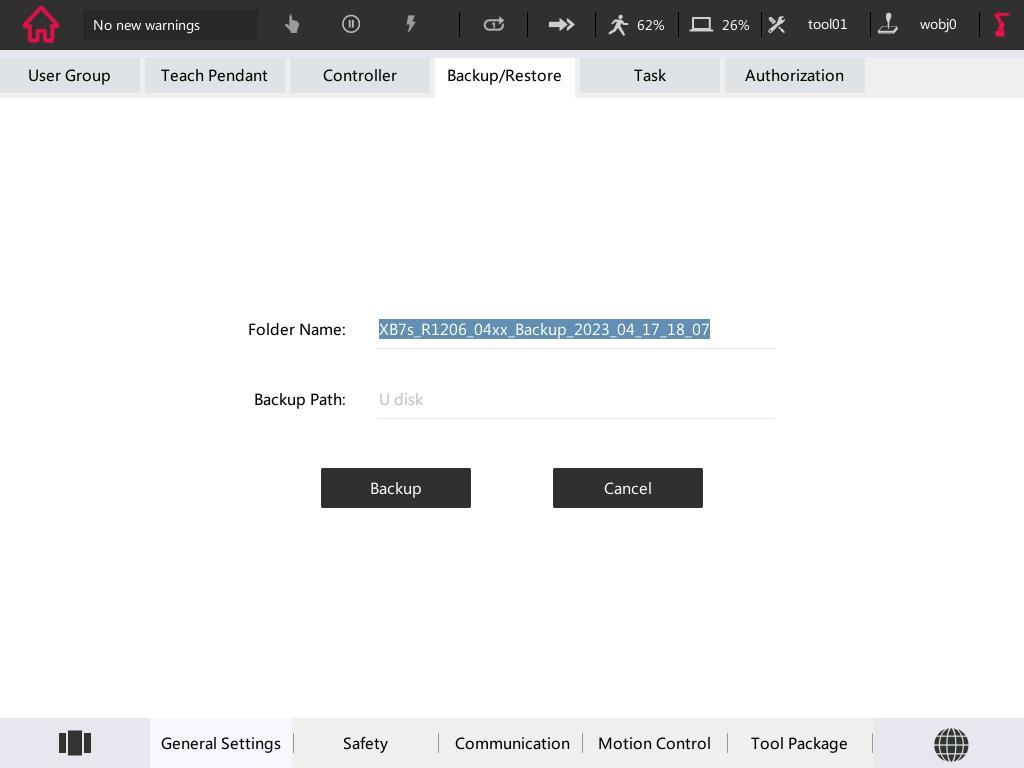
Appuyez sur , et sélectionnez Sauvegarder.
-
Sélectionnez Sauvegarder dans la fenêtre contextuelle.
Activer le multitâche
Vérifier si le robot prend en charge le multitâche
Par défaut, les robots ROKAE ne prennent pas en charge le multitâche. Pour l’activer, vous devez demander au fabricant une clé de licence (une chaîne de clés basée sur le chiffrement de l’adresse MAC).
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur et vérifiez s’il existe une fonction autorisée.
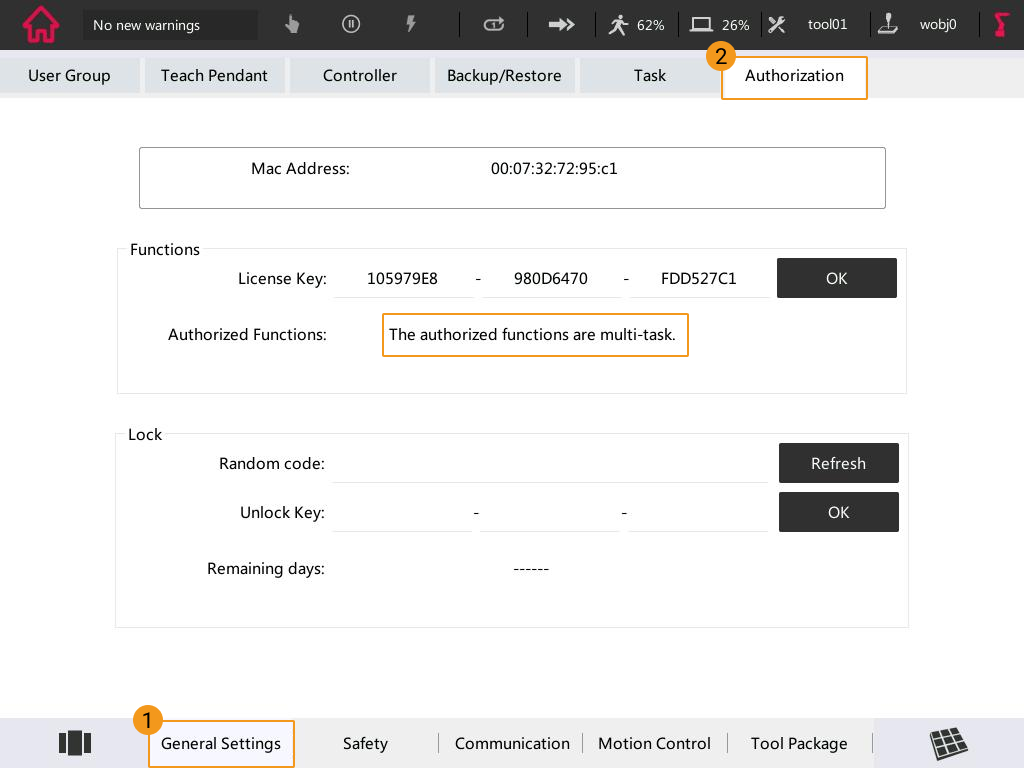
Sinon, vous devez contacter le fabricant du robot pour demander une clé de licence et la saisir dans la zone de texte correspondante.
Configurer les tâches getDIServer et singleTask5
-
Copiez et collez singleTask5 et getDIServer dans le système du robot. Veuillez consulter Préparer les fichiers pour des instructions détaillées.
-
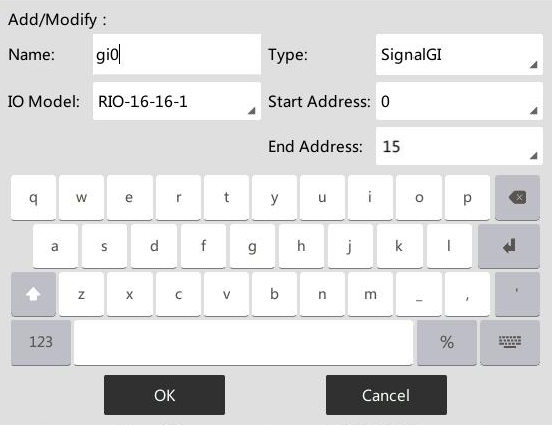
Ajoutez gi0.
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez successivement sur .
-
Configurez les options comme montré dans la figure ci-dessous, puis appuyez sur OK.
-
-
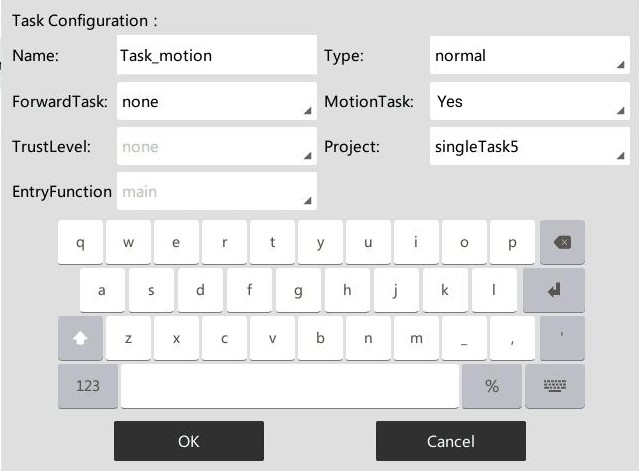
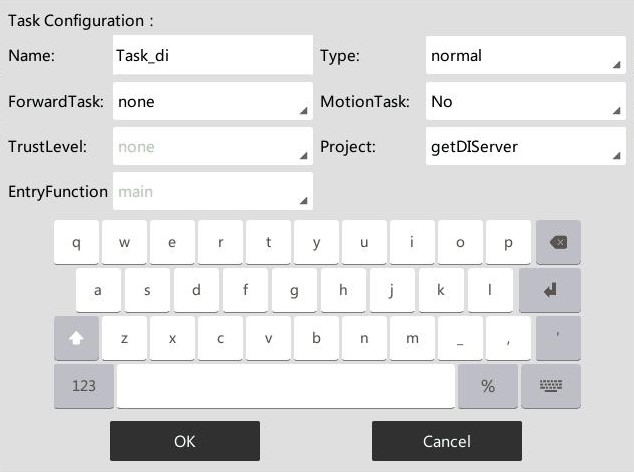
Configurez les tâches et les paramètres.
-
Sur le pupitre de commande, appuyez sur l’icône dans le coin supérieur gauche, puis sur Paramètres.
-
Appuyez sur .
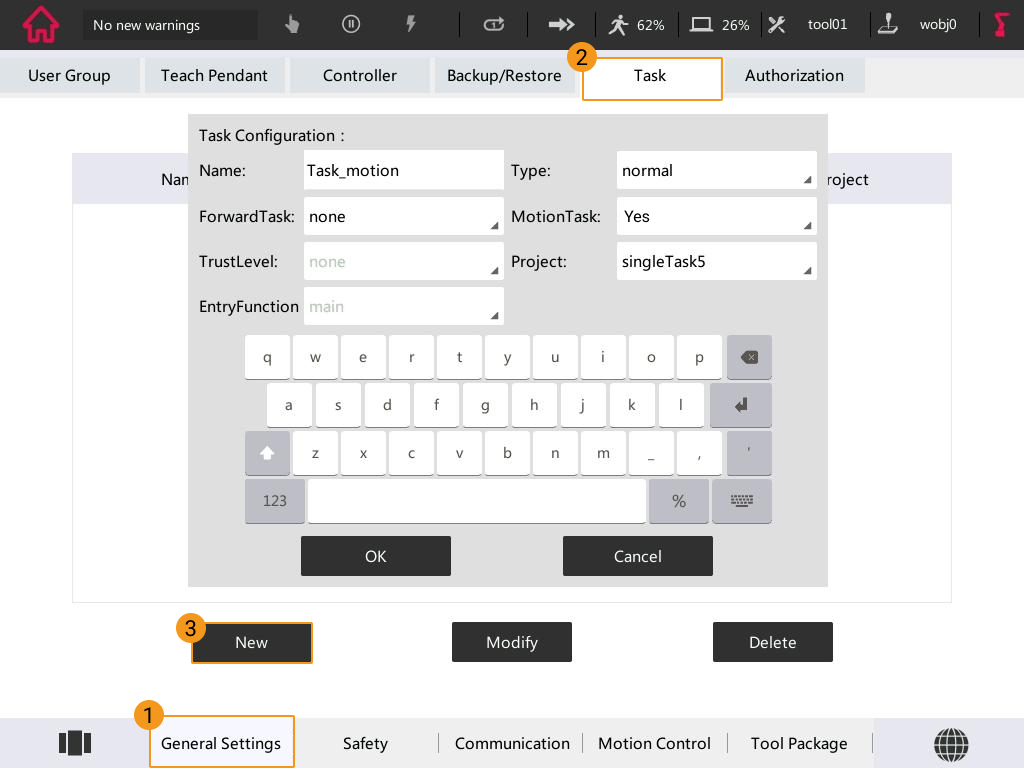
-
Configurez les deux tâches comme montré dans la figure ci-dessous, puis cliquez sur OK.
Veuillez consulter Tester la connexion du robot pour apprendre à exécuter les tâches.
-