Instructions relatives aux registres
Le type de données utilisé par l’API est la structure MM_Interface, qui occupe 1528 registres D. Les adresses de début et de fin des variables de la structure doivent être identiques à celles définies dans Mech-Vision. Lorsque l’adresse de début définie dans l’API et Mech-Vision est 10000, les adresses de registre de chaque variable sont illustrées dans la figure ci-dessous.
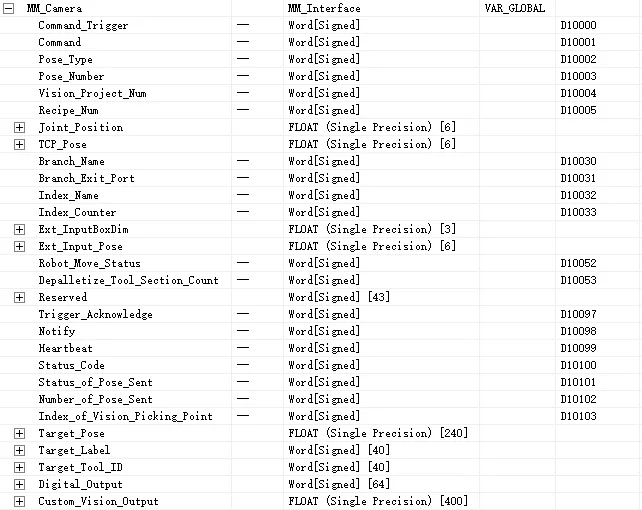
Le décalage d’adresse par rapport à l’adresse de départ (base) et les descriptions des registres pour chaque variable sont répertoriés dans le tableau ci-dessous.
| Décalage d’adresse | Nom | Type de données | Description |
|---|---|---|---|
0 |
Command_Trigger |
Mot[signé] |
Déclenchement du signal |
1 |
Command |
Mot[signé] |
Code de commande |
2 |
Pose_Type |
Mot[signé] |
Type de pose |
3 |
Pose_Number |
Mot[signé] |
Nombre attendu de points de vision ou de points de passage |
4 |
Vision_Project_Num |
Mot[signé] |
ID du projet Mech-Vision |
5 |
Recipe_Num |
Mot[signé] |
ID de la recette de paramètres |
6 |
Joint_Position |
Flottant[simple précision][6] |
Données de position articulaire |
18 |
TCP_Pose |
Flottant[simple précision][6] |
Données de pose de la bride |
30 |
Branch_Name |
Mot[signé] |
ID de l’étape Branch by Msg |
31 |
Branch_Exit_Port |
Mot[signé] |
Numéro du port de sortie de l’étape Branch by Msg |
32 |
Index_Name |
Mot[signé] |
ID de l’étape de type index |
33 |
Index_Counter |
Mot[signé] |
Valeur du paramètre Current Index de l’étape de type index |
34 |
Ext_InputBoxDim |
Flottant[simple précision][3] |
Dimensions de l’objet (longueur, largeur, hauteur) à saisir dans le projet Mech-Vision |
40 |
Ext_Input_Pose |
Flottant[simple précision][6] |
TCP du robot externe à saisir dans le projet Mech-Viz |
52 |
Robot_Move_Status |
Mot[signé] |
Statut du mouvement du robot |
53 |
Depalletize_Tool_Section_Count |
Mot[signé] |
Nombre de sections de la pince à vide |
54 |
Reserved |
Mot[signé][43] |
Champ réservé |
97 |
Trigger_Acknowledge |
Mot[signé] |
Confirmation de déclenchement |
98 |
Notify |
Mot[signé] |
Message de l’étape Notify |
99 |
Heartbeat |
Mot[signé] |
Valeur du heartbeat |
100 |
Status_Code |
Mot[signé] |
Code d’état |
101 |
Status_of_Pose_Sent |
Mot[signé] |
Si tous les points de vision ou points de passage ont été obtenus |
102 |
Number_of_Pose_Sent |
Mot[signé] |
Nombre de points de vision ou points de passage |
103 |
Index_of_Vision_Picking_Point |
Mot[signé] |
Position de « Vision Move » dans le trajet planifié |
104 |
Target_Pose |
Flottant[simple précision][240] |
Poses de tous les points de passage ou points de vision obtenus cette fois |
584 |
Target_Label |
Mot[signé][40] |
Étiquettes de tous les points de passage ou points de vision obtenus cette fois |
624 |
Target_Tool_ID |
Mot[signé][40] |
ID des outils de tous les points de passage obtenus cette fois |
664 |
Digital_Output |
Mot[signé][64] |
64 signaux DO renvoyés par le système de vision |
728 |
Custom_Vision_Output |
Flottant[simple précision][400] |
Données personnalisées de tous les points de vision obtenus cette fois |