Configuration de la communication Master-Control (robot collaboratif)
Ce guide vous montre comment configurer la communication Master-Control avec un robot collaboratif ROKAE Xmate7.
Préparation
Se connecter au robot
-
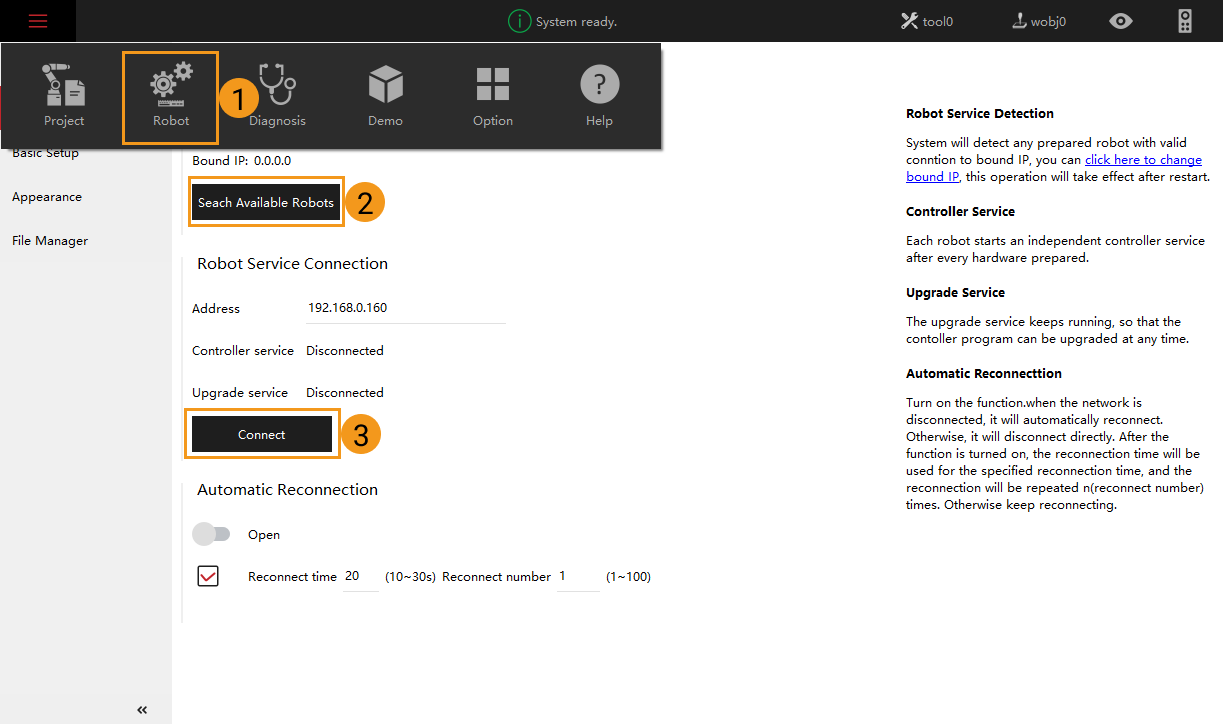
Ouvrez le logiciel du système de contrôle ROKAE Xmate7 et connectez le robot comme indiqué ci‑dessous. Si une fenêtre d’alerte s’affiche, indiquant que le système de contrôle actuel n’est pas compatible avec le modèle de robot, veuillez mettre à niveau le système conformément aux instructions.
Charger les fichiers du programme vers le robot
Basculer le niveau
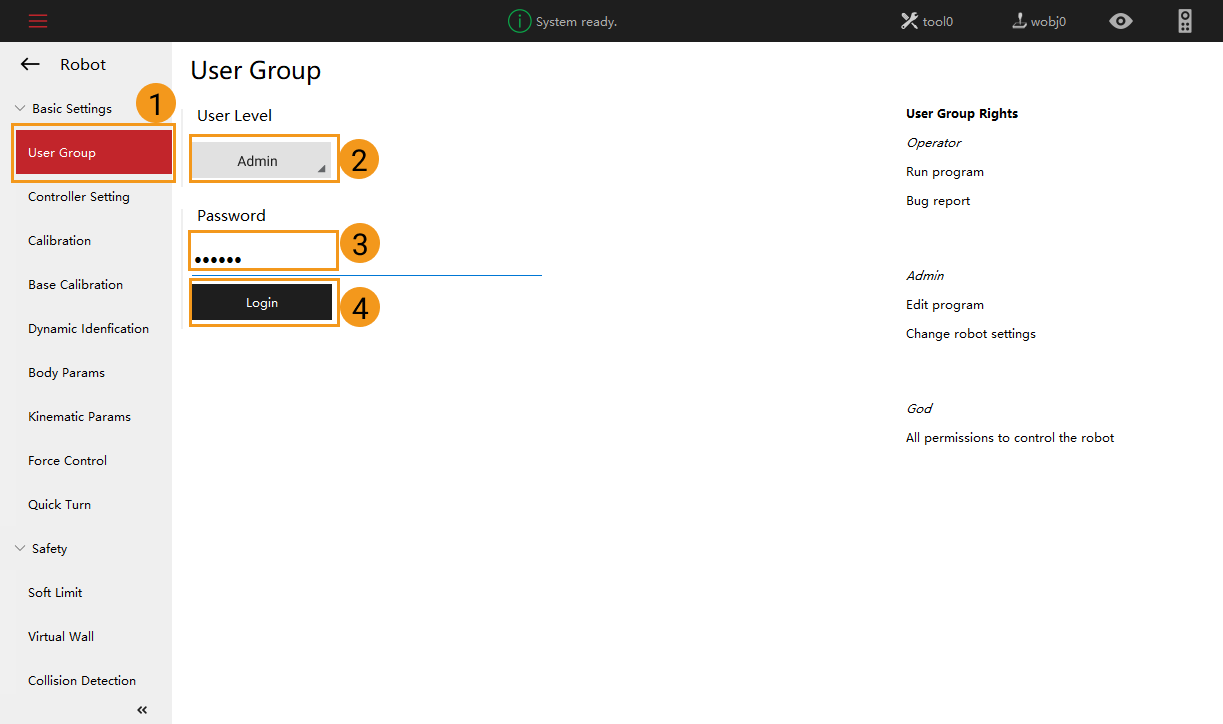
Accédez à depuis la barre d’outils de gauche, sélectionnez Admin comme niveau utilisateur, saisissez le mot de passe par défaut 123456, puis sélectionnez Connexion.
Charger les fichiers sur le robot
Veuillez suivre les étapes ci‑dessous pour charger le programme Master-Control sur le robot.
-
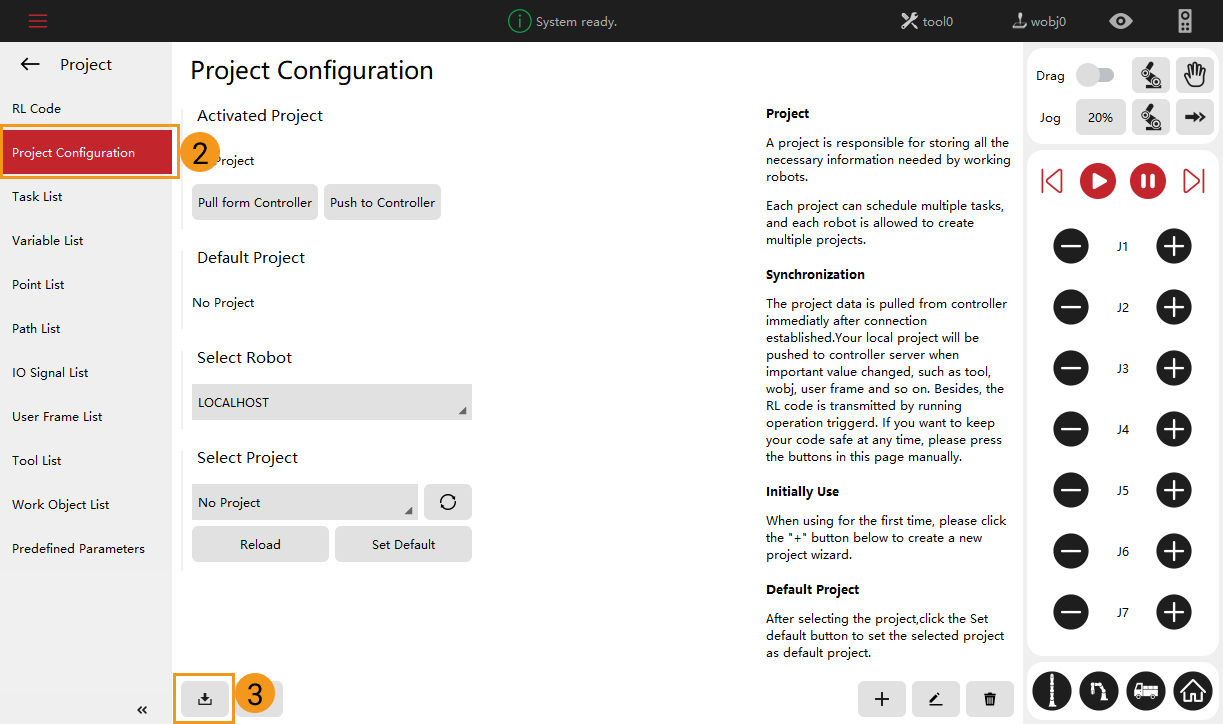
Accédez à Projet ‣ Configuration du projet.

-
Sélectionnez le fichier de programme Xmate7.zip que vous souhaitez importer, puis sélectionnez Suivant.
Le fichier de programme est stocké dans Communication Component/Robot_Server/Robot_FullControl/rokaedans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés.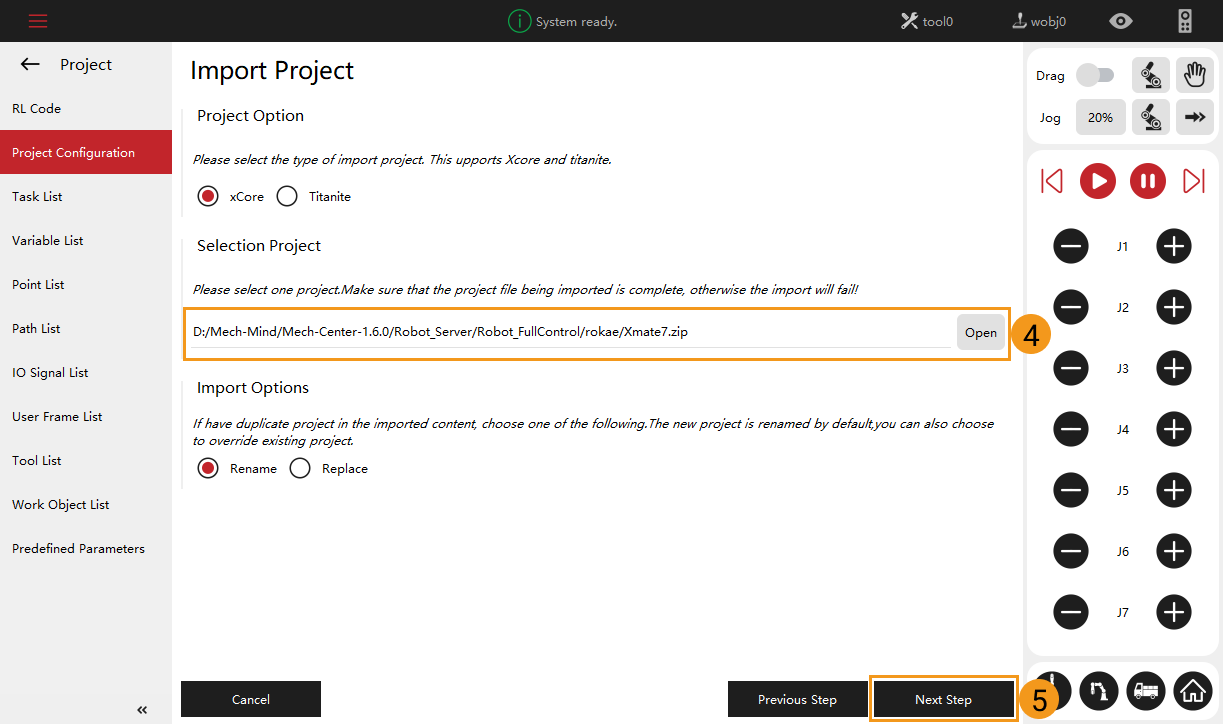
-
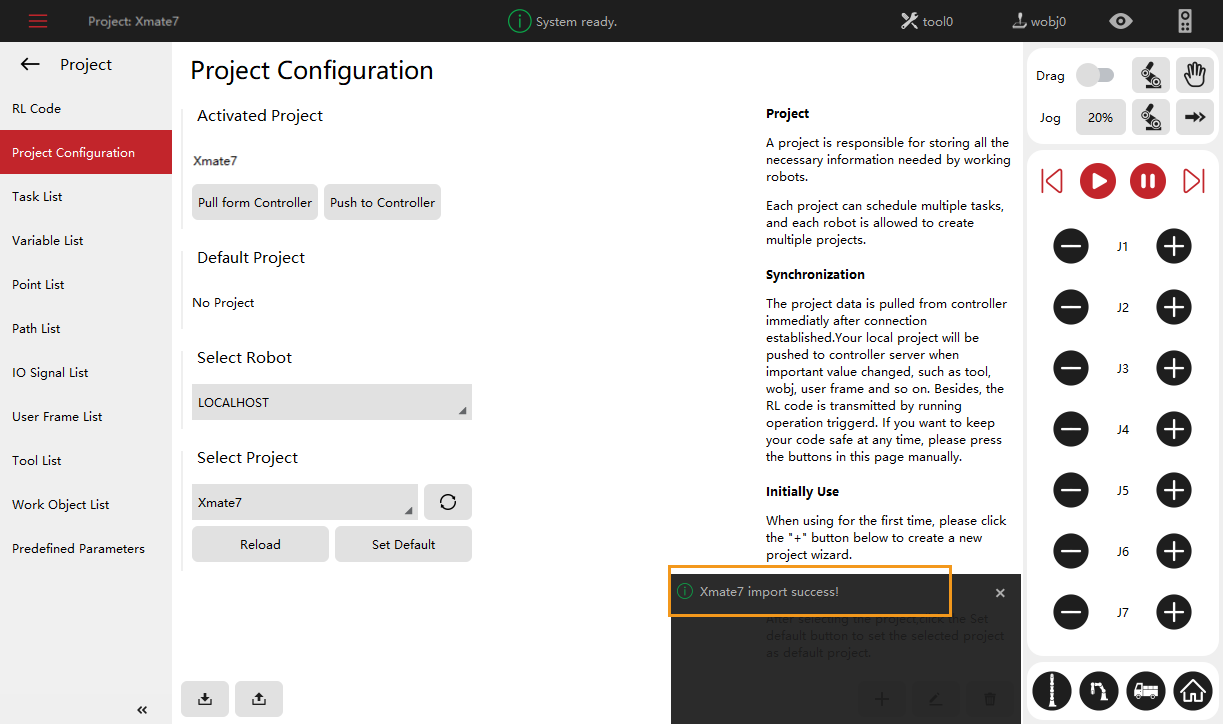
Un message « Importation réussie » apparaîtra dans le coin inférieur droit.
-
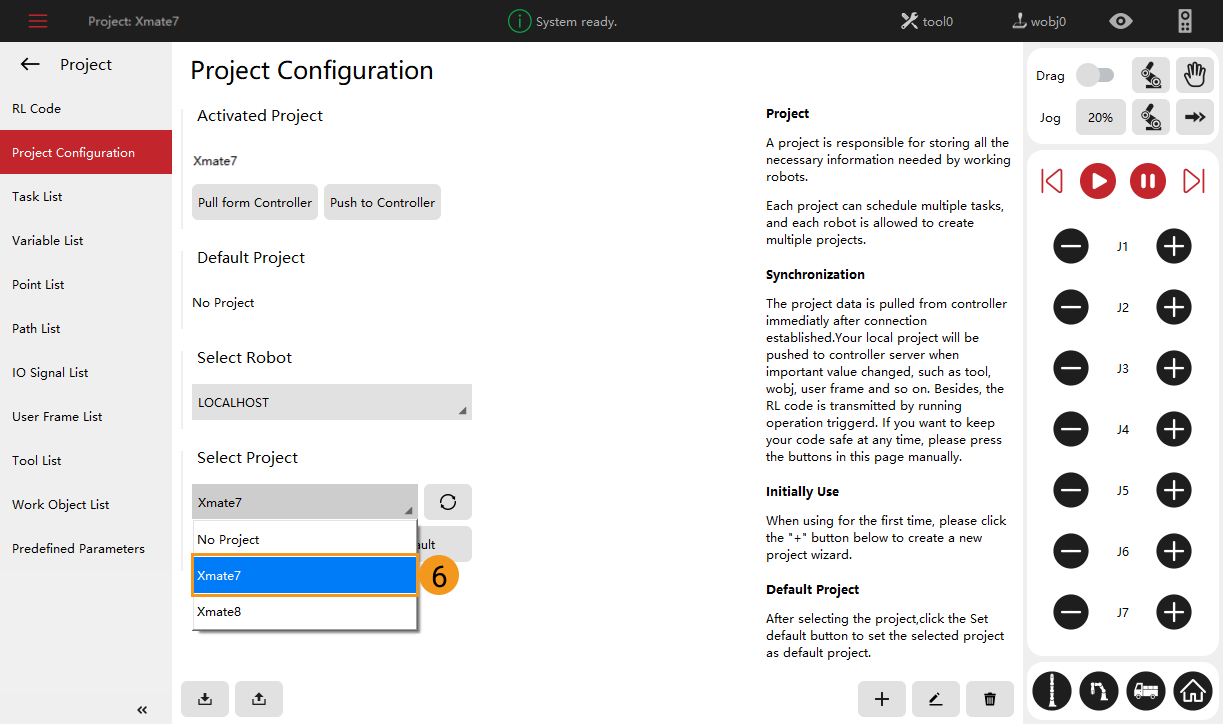
Sélectionnez le programme Xmate7.
-
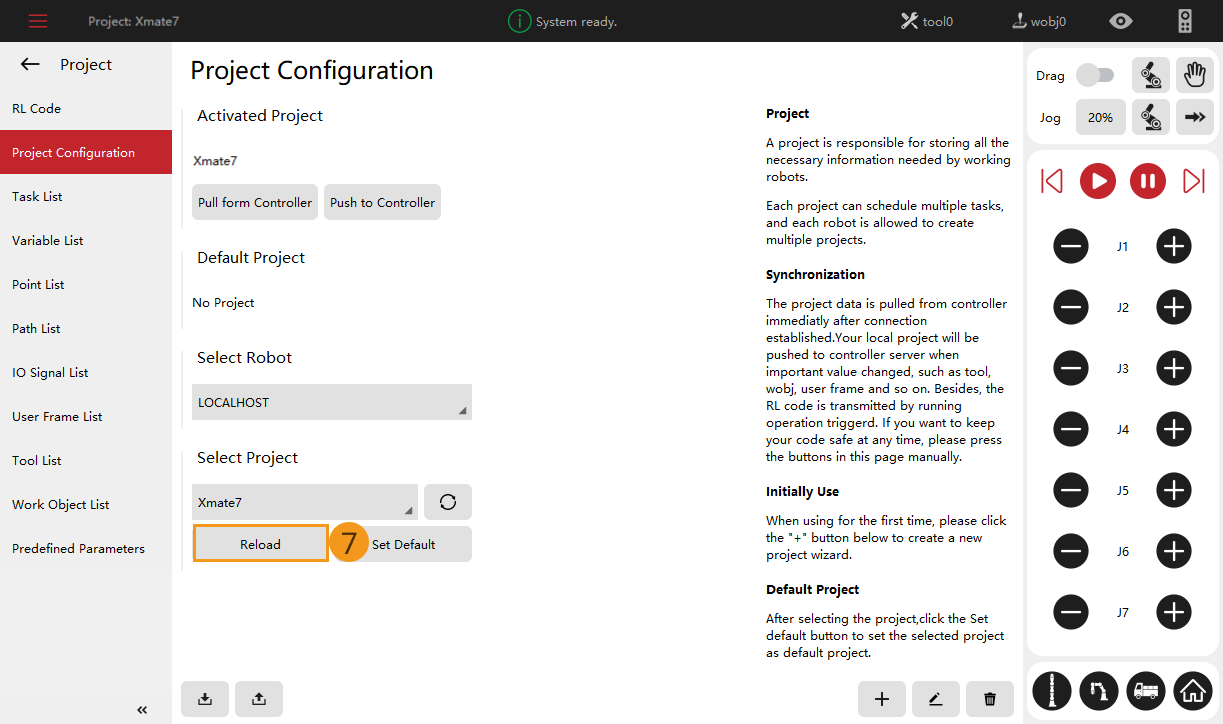
Sélectionnez Recharger, puis sélectionnez Oui dans la fenêtre contextuelle。
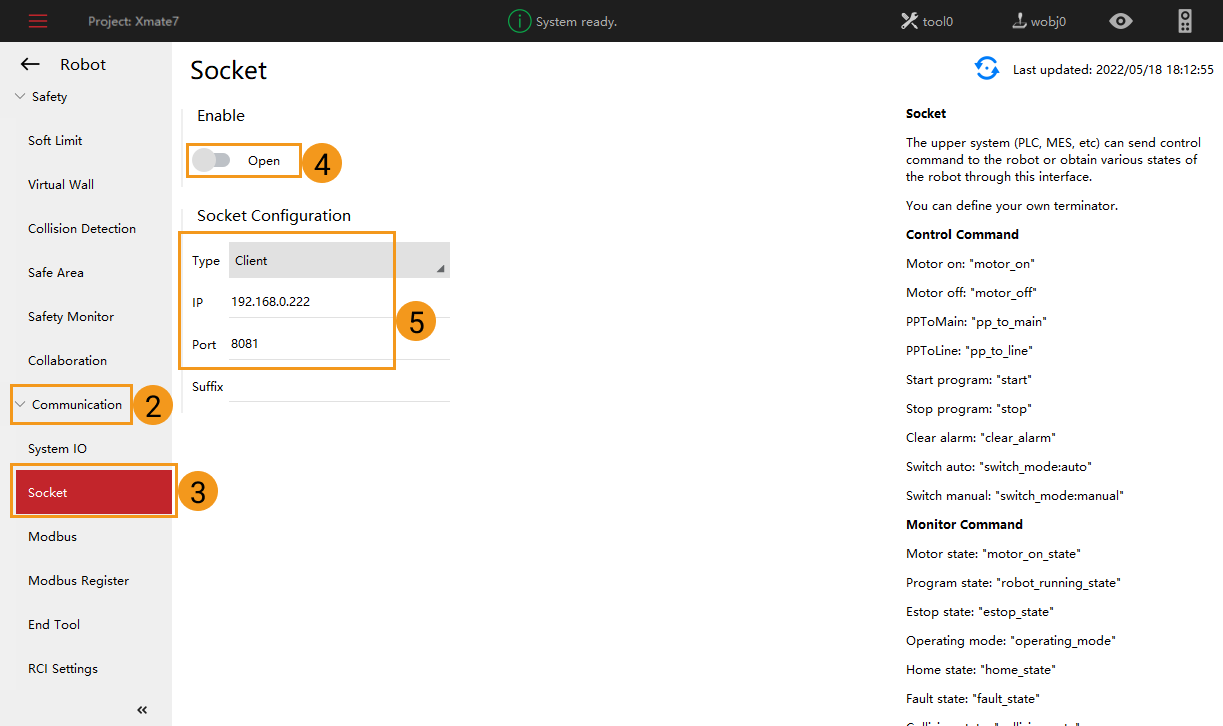
Configurer la communication externe
-
Sélectionnez Robot.

-
Accédez à . Suivez ensuite les étapes indiquées sur la figure ci‑dessous pour activer l’option Activer et configurer le socket.
Tester la communication Master-Control
-
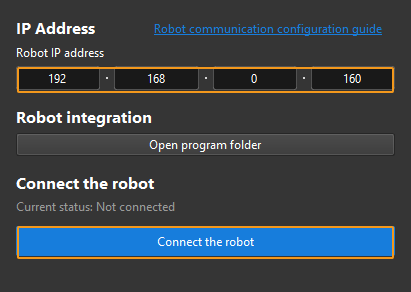
Sélectionnez Robot Master-Control dans la barre d’outils de Mech-Viz.
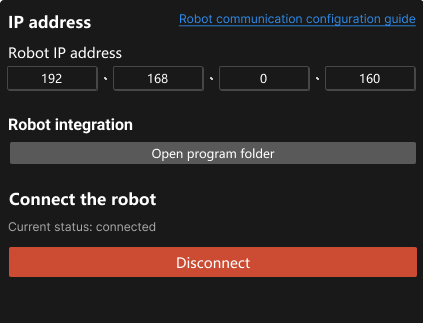
Saisissez 192.168.0.160 dans Adresse IP du robot et sélectionnez Connecter le robot.
Mech-Viz attend que le programme master-control soit lancé avant d’établir la connexion. Par défaut, le temps d’attente est de 120s.
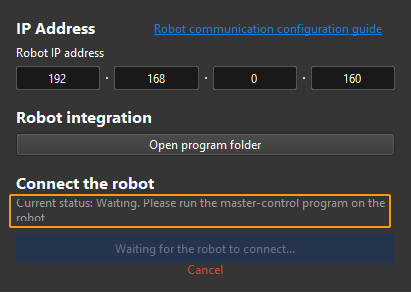
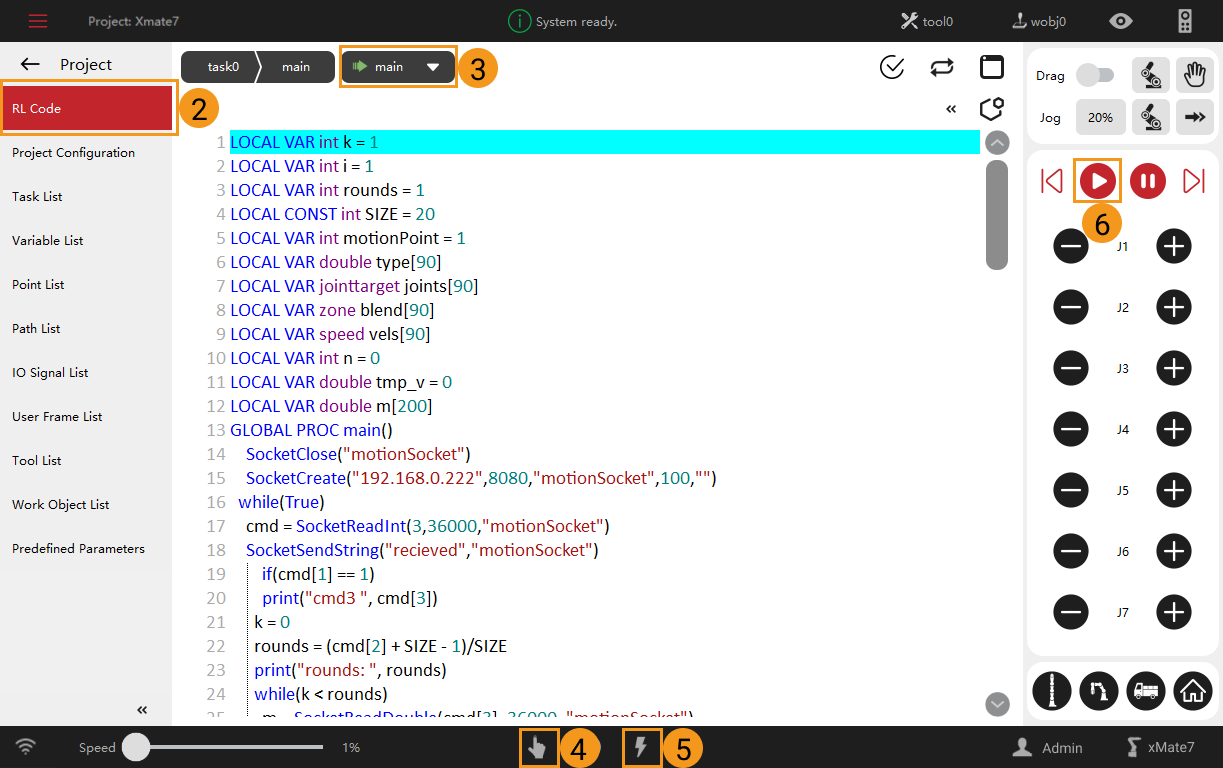
Avec les étapes suivantes, vous pouvez charger et exécuter le programme master-control. Notez que l’opération doit être terminée en 120 secondes. Sinon, vous devrez sélectionner à nouveau Connecter le robot dans Mech-Viz.
Dans Mech-Viz, l’état actuel indique « connecté ».
Après avoir terminé l’opération ci‑dessus, veuillez déplacer le robot.