UR E-Series (Polyscope 5.3 ou supérieur)
Cette section présente le processus de configuration de la communication via l’Interface Standard avec un robot Universal Robots (UR) de la série e.
Installation et configuration du plugin
Cette section présente l’installation et la configuration du plugin Mech-Mind 3D Vision Interface (URCap) pour l’UR e-series.
Prérequis
Vérifiez que vous respectez les versions minimales requises des logiciels Mech-Mind vision-series et de Polyscope.
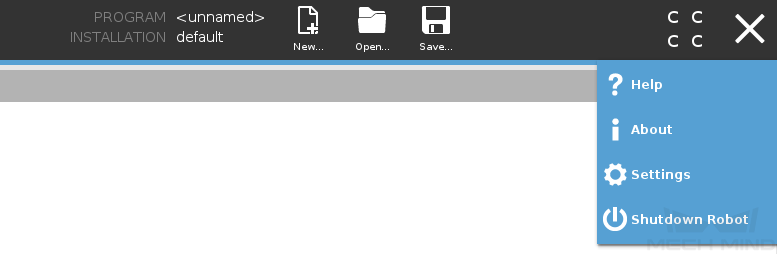
Pour afficher la version de Polyscope, appuyez sur le menu hamburger dans l’angle supérieur droit du pupitre d’enseignement UR et sélectionnez À propos.
Installer le plugin URCap
Pour installer le plugin URCap, suivez ces étapes :
-
Trouvez le fichier du plugin URCap avec l’extension « .urcap » dans
Communication Component\Robot_Interface\Robot_Plugin\UR_URCAP\Polyscopedans le répertoire d’installation de Mech-Vision & Mech-Viz, et copiez le fichier sur une clé USB. -
Insérez la clé USB dans le pupitre d’enseignement UR.
-
Appuyez sur le menu hamburger dans l’angle supérieur droit, et sélectionnez Paramètres.
-
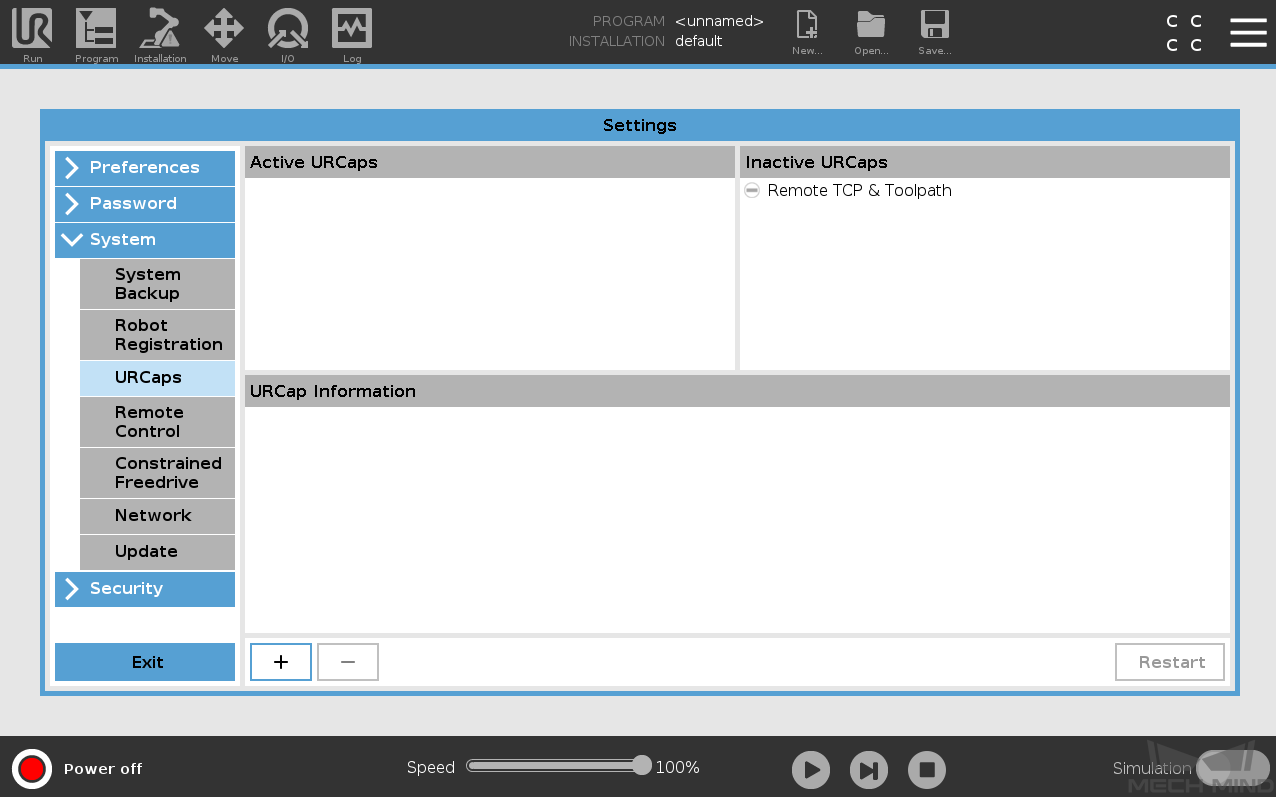
Dans la fenêtre Paramètres, sélectionnez .
-
Appuyez sur + pour accéder à la clé USB afin de localiser le plugin URCap.
-
Dans la fenêtre Sélectionner le URCap à installer, sélectionnez le plugin URCap et appuyez sur Ouvrir. Le plugin URCap sera automatiquement installé.
-
Appuyez sur Redémarrer pour que la modification prenne effet.
À ce stade, le plugin URCap est installé avec succès sur le pupitre d’enseignement UR.
| Après avoir installé le plugin URCap, vous devez également définir l’adresse IP du robot (sélectionnez Setting > System > Network). Notez que l’adresse IP du robot et l’adresse IP de l’IPC doivent être sur le même sous-réseau. |
Utiliser Mech-Mind 3D Vision Interface
|
Avant utilisation, assurez-vous que vos projets Mech-Vision et Mech-Viz (si utilisés) sont prêts à s’exécuter, et que l’IPC Mech-Mind est connecté au réseau du robot. |
Pour utiliser Mech-Mind 3D Vision Interface, vous devez effectuer la configuration suivante.
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
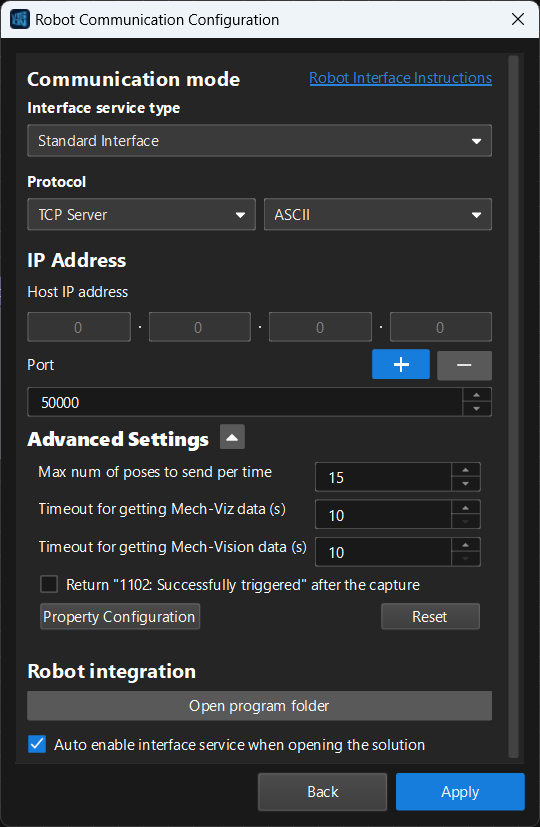
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Dans la section Paramètres avancés, définissez Nombre maximal de poses à envoyer à la fois sur 15.
-
Définissez le numéro de port sur 50000 (valeur fixe). Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Après le démarrage de l’interface du serveur TCP dans Mech-Vision, vous pouvez vous y connecter sur le pupitre d’enseignement UR.
-
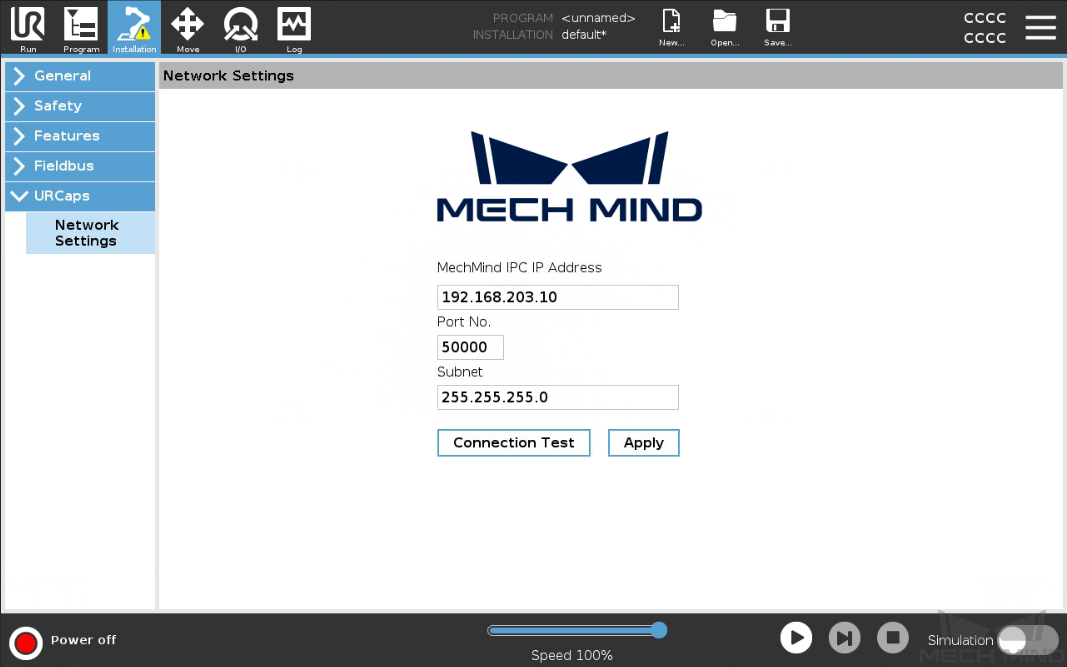
Sur le pupitre d’enseignement UR, appuyez sur Installation dans la barre supérieure, puis sélectionnez . La fenêtre Paramètres réseau du plugin URCap s’affiche.
-
Définissez Mech-Mind IPC IP Address et Port No. sur l’adresse IP et le numéro de port de l’IPC Mech-Mind respectivement (le numéro de port défini doit être cohérent avec le numéro de port défini dans la configuration de la communication du robot dans Mech-Vision). Ensuite, appuyez sur Appliquer.
-
Appuyez sur Test de connexion.
-
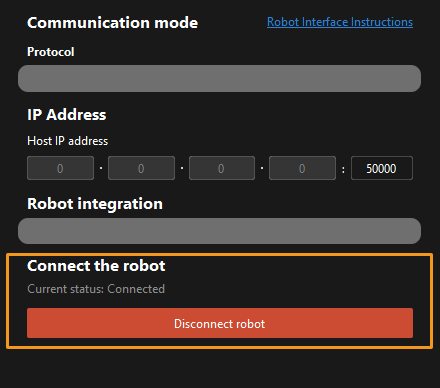
Lorsque la connexion à l’interface du serveur TCP est établie avec succès, le statut de retour devrait ressembler à ceci :

-
Lorsque la connexion à l’interface du serveur TCP échoue, le statut de retour devrait ressembler à ceci :
Le test de connexion sert uniquement au test. Une fois connecté, il se déconnectera automatiquement. Par conséquent, vous verrez des journaux client en ligne et hors ligne dans l’onglet Console du panneau Log de Mech-Vision.
-
Calibration main-œil à l’aide du plugin
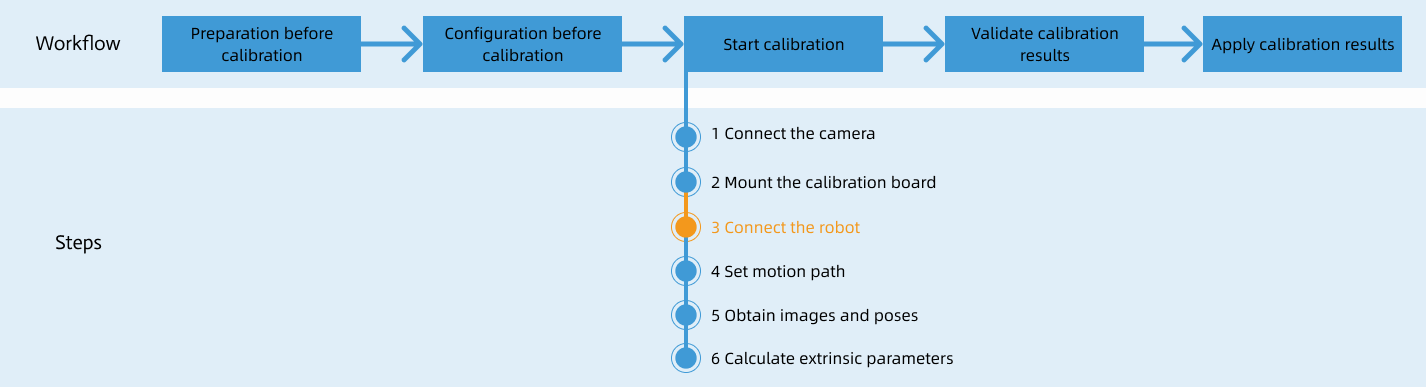
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
Créer un programme d’étalonnage
-
Dans la barre supérieure du pupitre d’enseignement UR, appuyez sur Nouveau et sélectionnez Programme pour créer un nouveau programme.
-
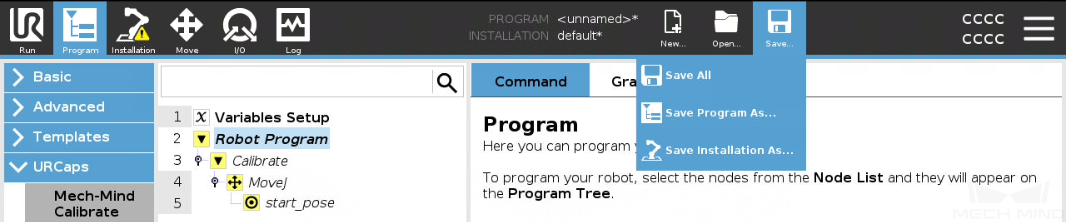
Appuyez sur Programme dans la barre supérieure, puis sélectionnez . Un nœud de programme d’exemple Calibrer est automatiquement créé sous le Programme du robot dans le panneau de gauche.
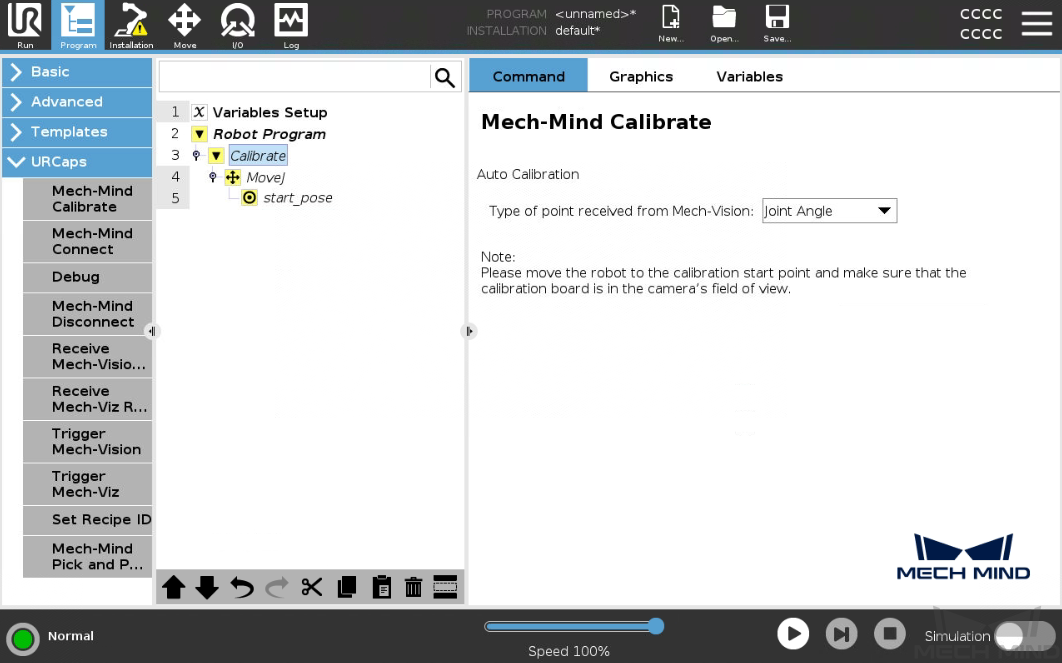
Le nœud de programme d’exemple créé n’est qu’un modèle. Vous devez configurer davantage le programme d’étalonnage et enseigner le point de départ de l’étalonnage.
Enseigner le point de départ de l’étalonnage
-
Double-cliquez sur le nœud Calibrer. Dans l’onglet Commande du panneau de droite, définissez Type de point reçu de Mech-Vision en fonction des besoins réels.
-
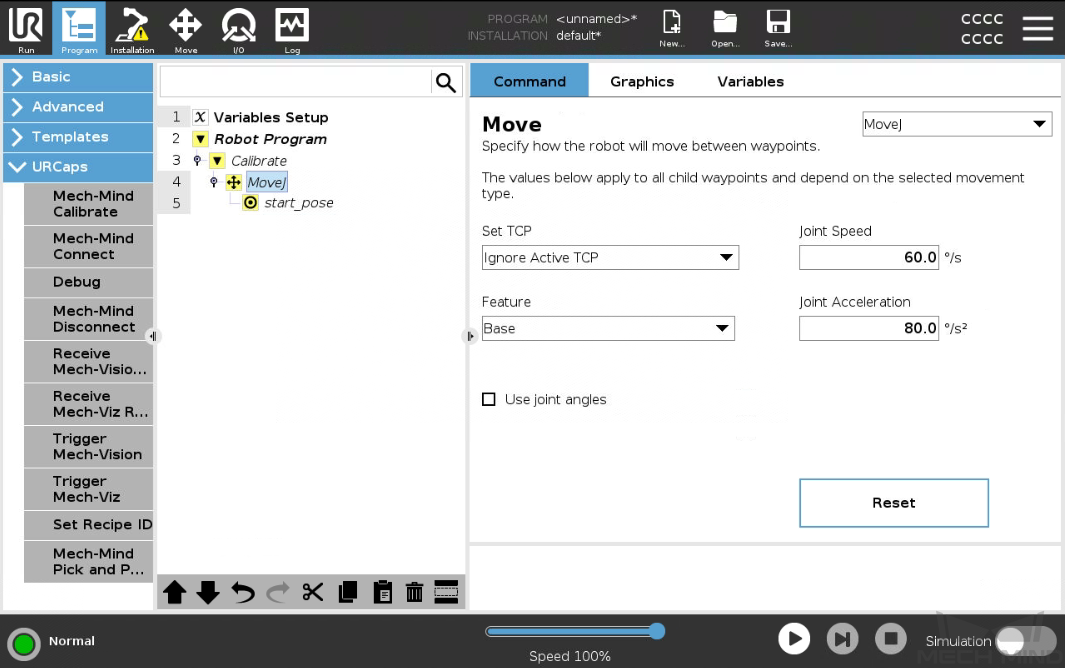
Sélectionnez le nœud MoveJ, définissez le type de mouvement (MoveJ, MoveL ou MoveP), et configurez Définir le TCP sur Ignorer le TCP actif dans le panneau Déplacement à droite pour garantir que le point de passage sera enregistré comme une pose de bride.
-
Contrôlez manuellement le robot pour le déplacer au point de départ de la calibration.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
Revenez au pupitre d’enseignement UR et sélectionnez le nœud start_pose. Appuyez sur Définir le point de passage dans le panneau Point de passage à droite. Vous serez basculé vers l’onglet Déplacement.
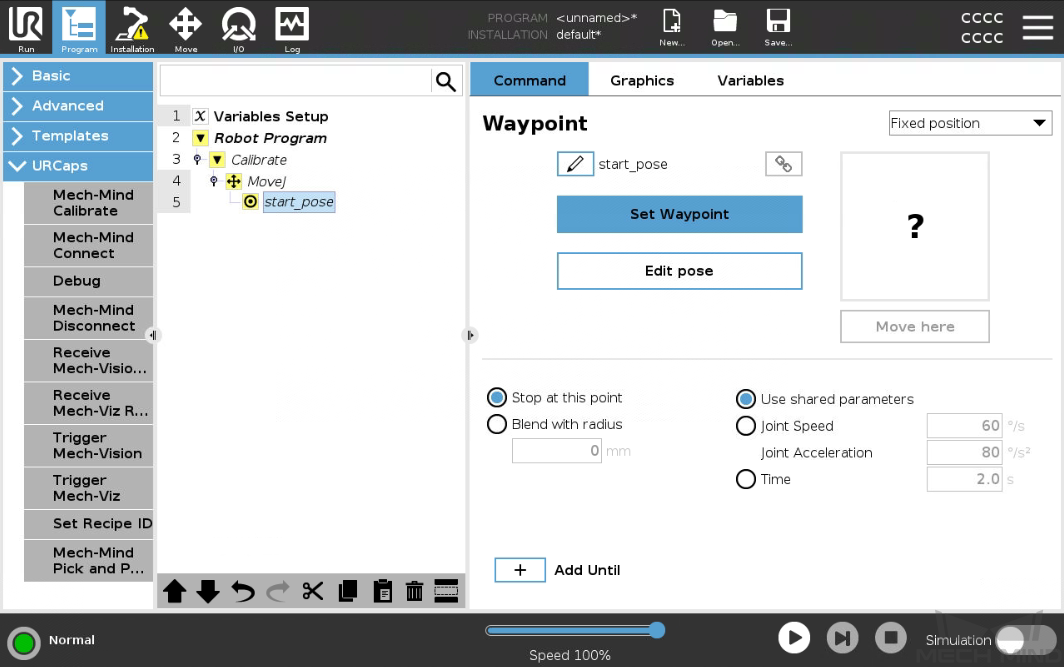
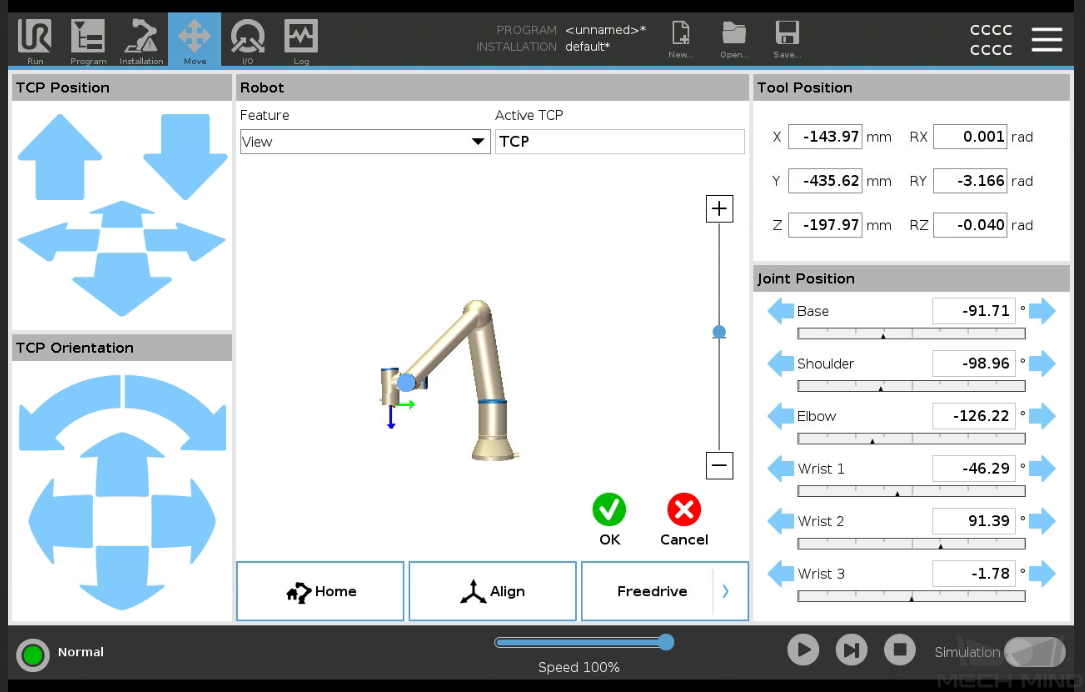
-
Dans l’onglet Déplacement, confirmez que la pose actuelle de la bride du robot est correcte et appuyez sur OK.
Exécuter le programme d’étalonnage
-
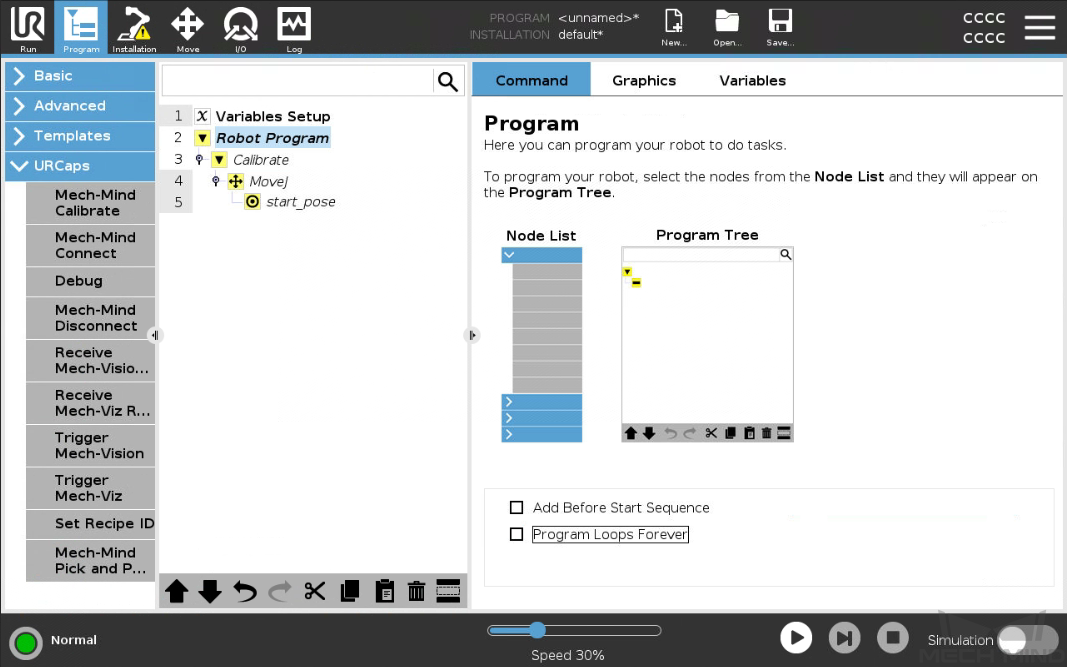
Sélectionnez le Programme du robot dans le panneau de gauche, et désélectionnez la case Boucler le programme indéfiniment dans le panneau Programme à droite pour garantir que le programme ne s’exécute qu’une fois.
-
Dans la barre inférieure, réduisez la vitesse du robot à une valeur appropriée, telle que 10 %, pour des raisons de sécurité.
-
Appuyez sur
 dans la barre inférieure pour exécuter le programme.
dans la barre inférieure pour exécuter le programme. -
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-
Pour enregistrer le programme d’étalonnage en vue d’une utilisation ultérieure, sélectionnez dans la barre supérieure pour l’enregistrer.
Après avoir terminé la calibration main-œil, vous pouvez créer des programmes de prise et dépose pour instruire les robots UR afin d’exécuter des tâches de prise et dépose guidées par la vision.
Créer des programmes de prise et dépose
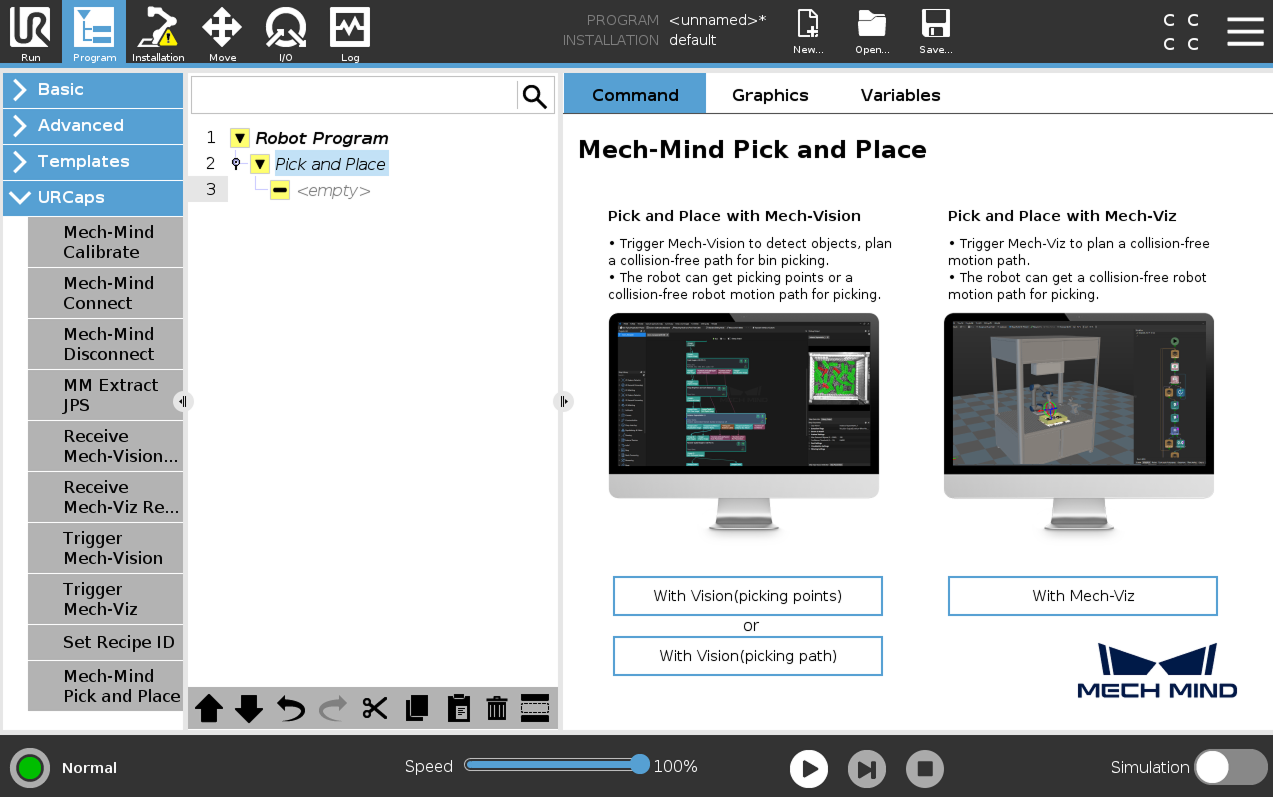
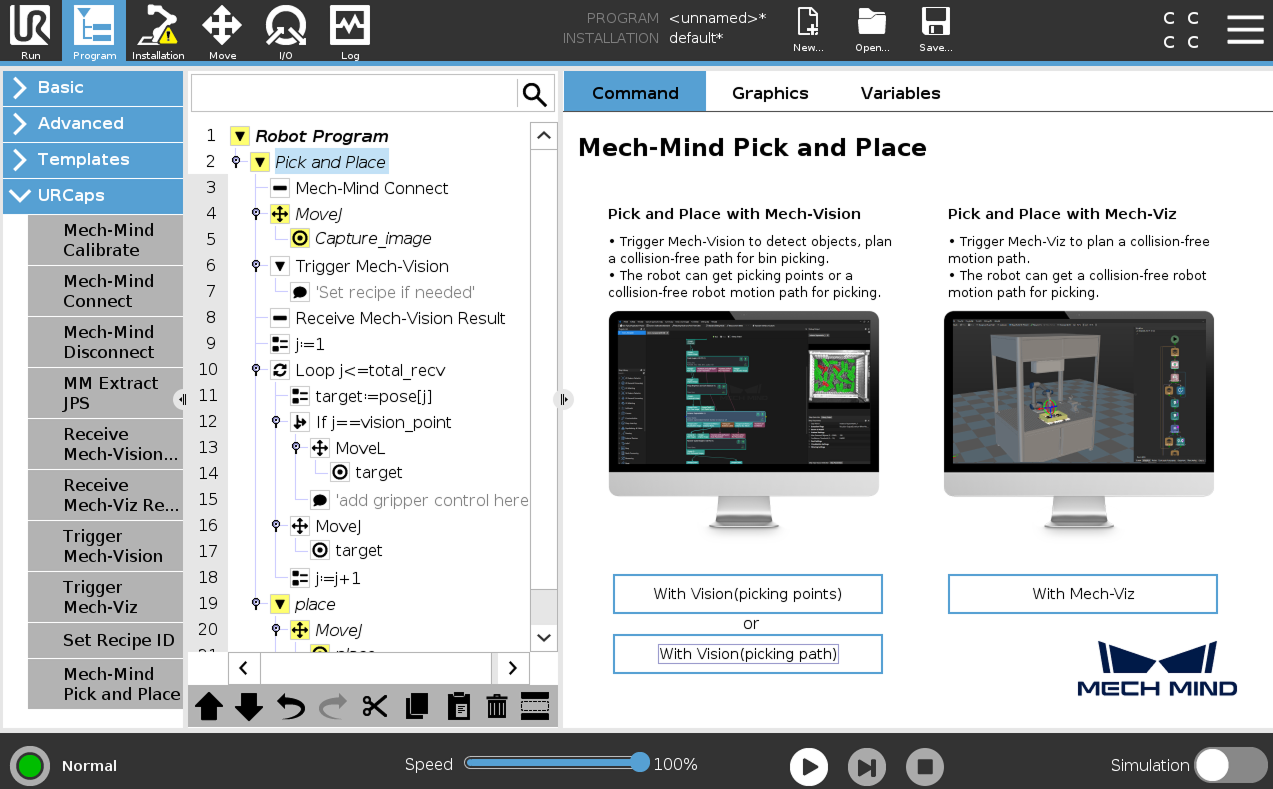
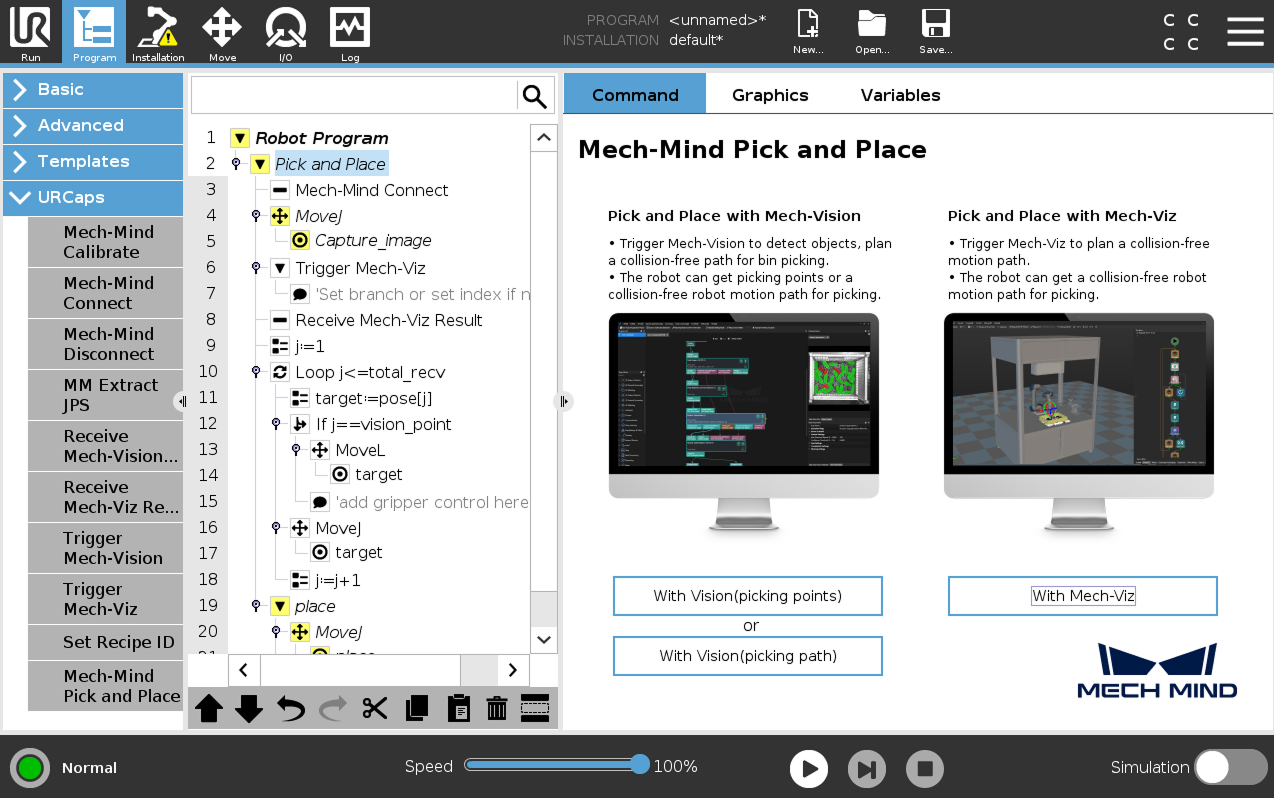
Le plugin URCap fournit un nœud de programme d’exemple de prise et dépose pour vous permettre de créer des programmes de prise et dépose avec un minimum d’efforts de programmation.
Ce nœud de programme de prise et dépose propose trois options :
-
Prise et dépose avec Mech-Vision (points de prise) : convient aux scénarios où seul un projet Mech-Vision est utilisé (l’Étape « Path Planning » n’est pas incluse) et où le robot n’a pas besoin de Mech-Viz pour planifier la trajectoire.
-
Prise et dépose avec Mech-Vision (trajectoire de prise) : convient aux scénarios où seul un projet Mech-Vision est utilisé (l’Étape « Path Planning » est incluse) et où le robot n’a pas besoin de Mech-Viz pour planifier la trajectoire.
-
Prise et dépose avec Mech-Viz : convient aux scénarios où un projet Mech-Viz est utilisé conjointement avec un projet Mech-Vision pour fournir une trajectoire de mouvement sans collision pour le robot.
|
Créer un programme de prise et dépose avec Mech-Vision (points de prise)
Pour créer un programme de prise et dépose avec Mech-Vision (points de prise), suivez ces étapes :
-
Activez l’option Avec Vision (points de prise).
-
Dans la barre supérieure du pupitre d’enseignement UR, appuyez sur Nouveau et sélectionnez Programme pour créer un nouveau programme.
-
Appuyez sur Programme dans la barre supérieure, puis sélectionnez . Un nœud de programme d’exemple Prise et dépose est automatiquement créé sous le Programme du robot dans le panneau de gauche.
-
Dans l’onglet Commande du panneau de droite, appuyez sur le bouton Avec Vision (points de prise). Un modèle de programme est automatiquement créé sous le nœud Prise et dépose dans l’arbre du programme.
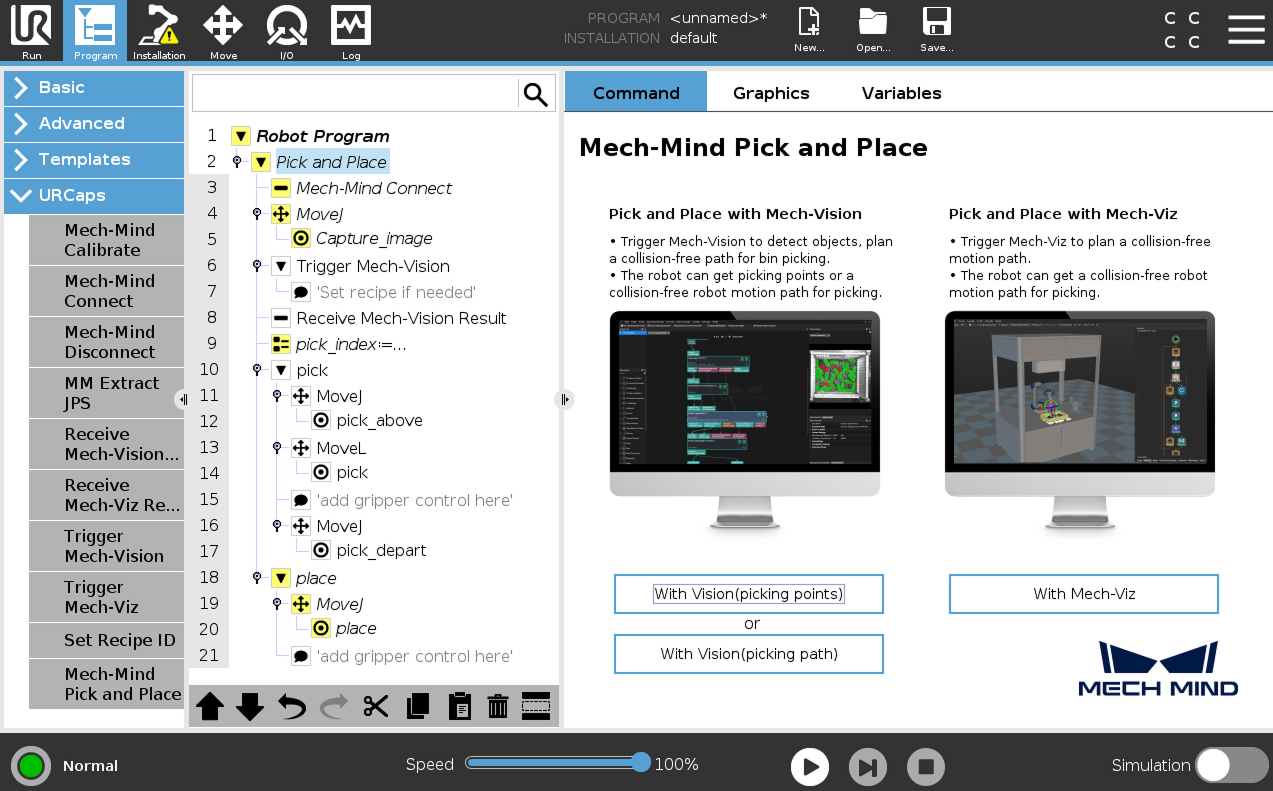
-
-
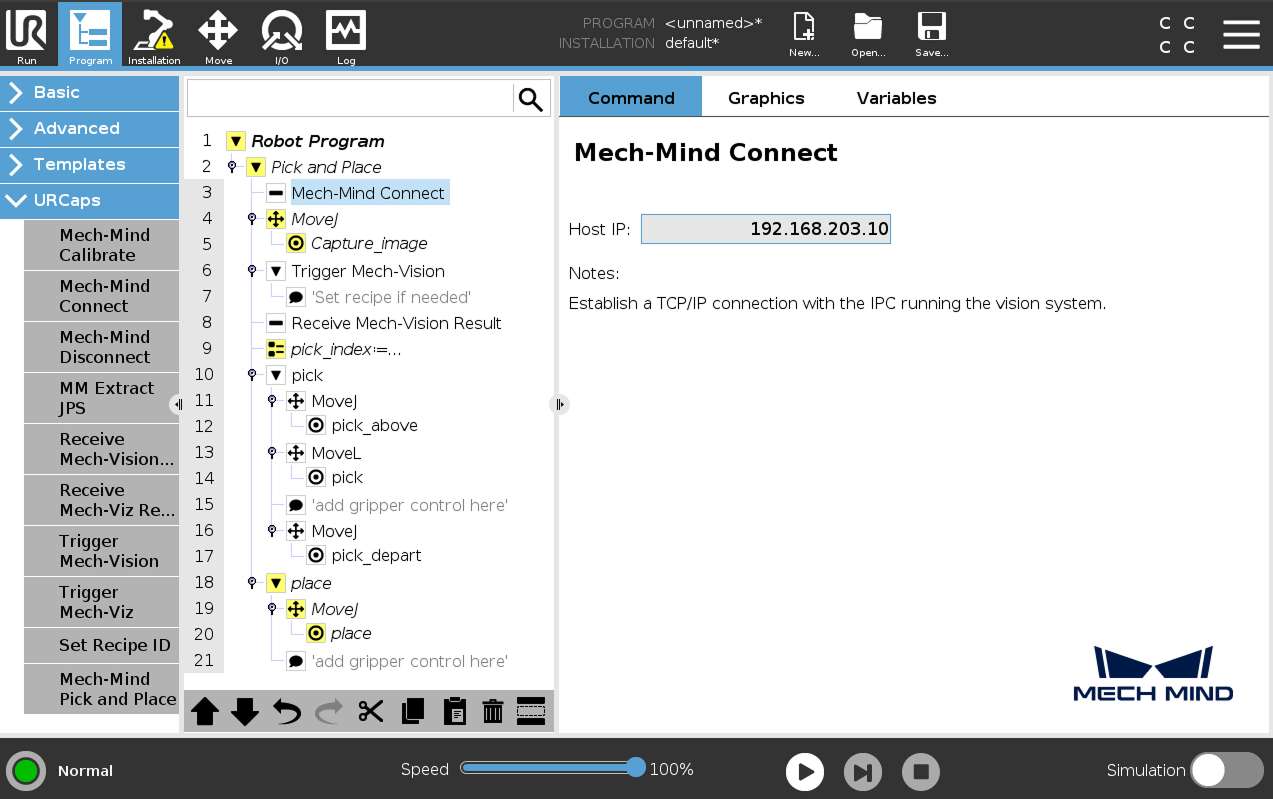
Sélectionnez le nœud Mech-Mind Connect, et vérifiez que le paramètre Host IP est l’adresse IP de l’IPC Mech-Mind dans le panneau Mech-Mind Connect à droite.
-
Définissez la pose de capture d’image.
-
Déplacez manuellement le robot à un emplacement approprié où Mech-Vision déclenche la caméra pour capturer une image.
-
Pour le scénario Eye-In-Hand, le robot doit être placé au-dessus de la pièce.
-
Pour le scénario Eye-To-Hand, le robot ne doit pas obstruer le champ de vision de la caméra.
-
-
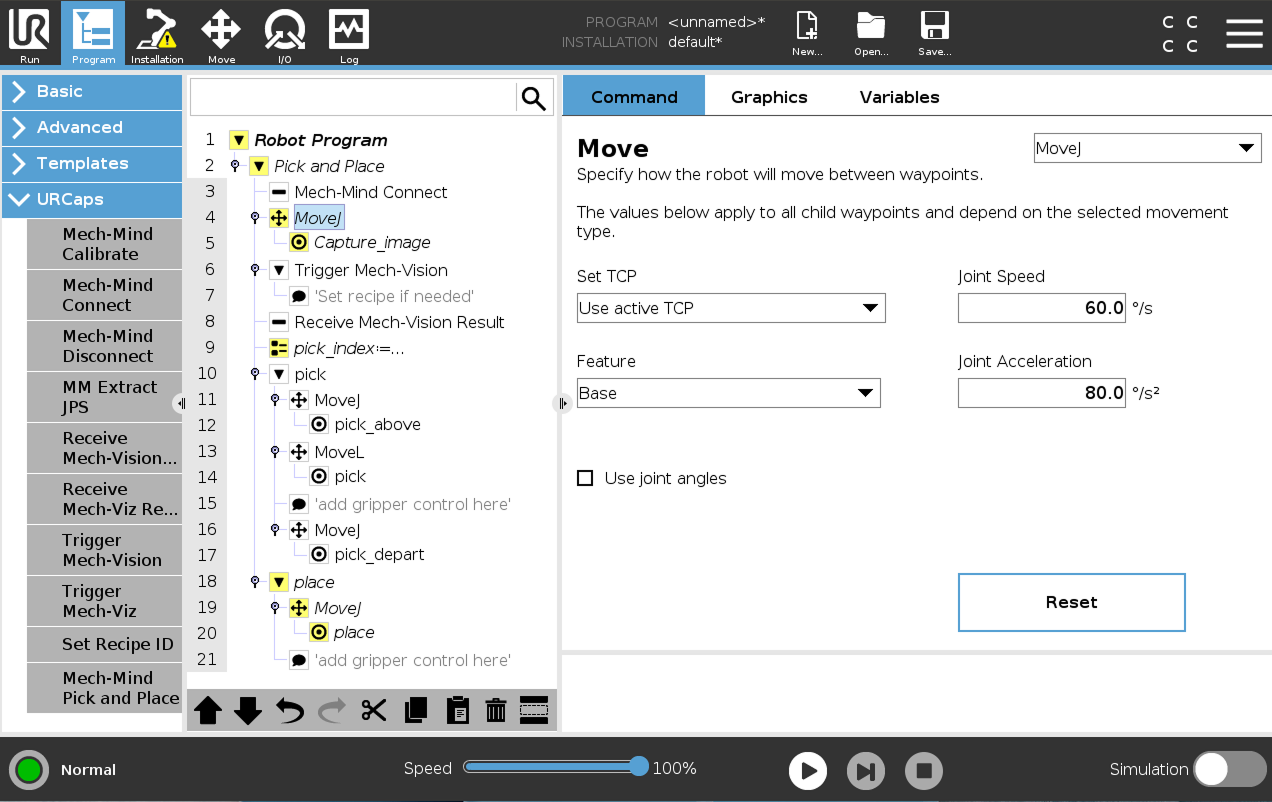
Revenez au pupitre d’enseignement UR et sélectionnez le nœud MoveJ dans l’arbre du programme. Dans le panneau Déplacement à droite, définissez le type de mouvement (MoveJ, MoveL ou MoveP), et configurez Définir le TCP sur Utiliser le TCP actif.
-
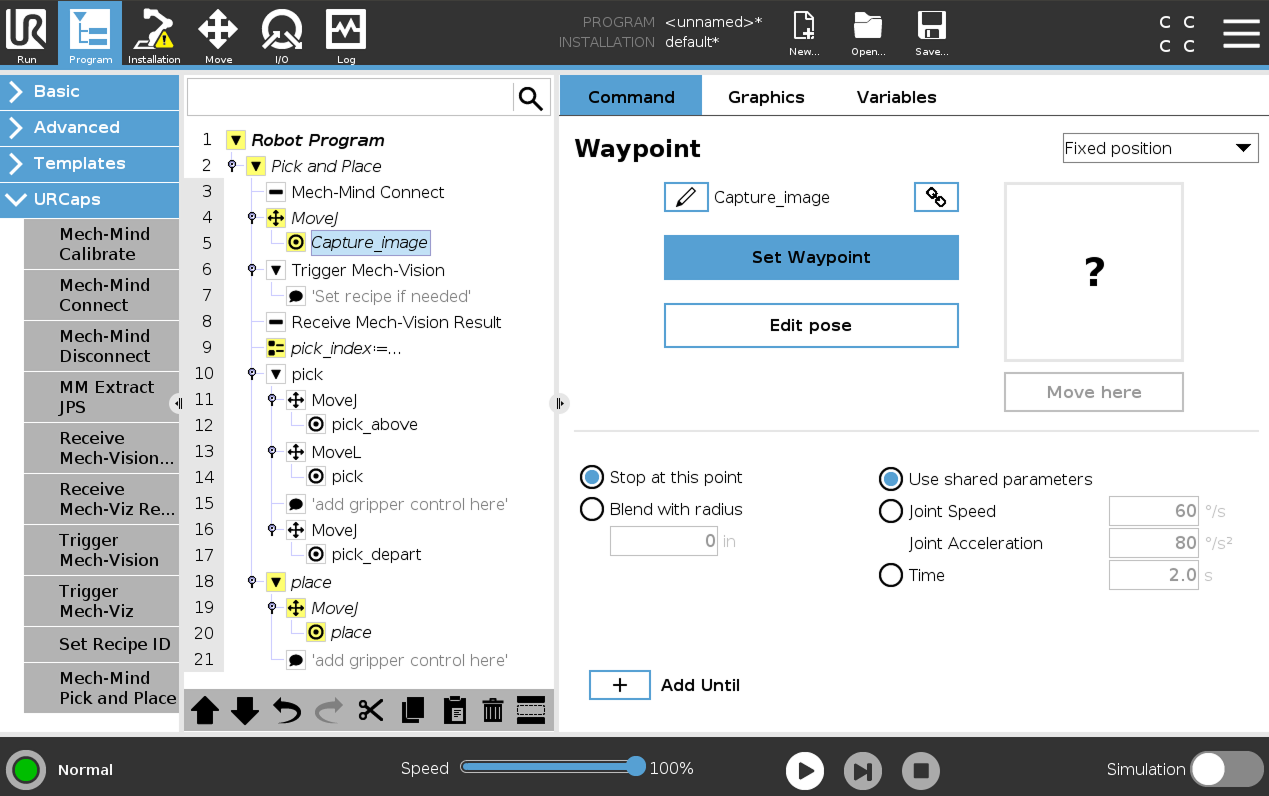
Sélectionnez le nœud Capture_image dans l’arbre du programme, et appuyez sur Définir le point de passage dans le panneau Point de passage à droite. Vous serez basculé vers l’onglet Déplacement.
-
Dans l’onglet Déplacement, confirmez que le TCP actuel du robot est correct et appuyez sur OK.
-
-
Déclenchez l’exécution du projet Mech-Vision.
-
Sélectionnez le nœud Trigger Mech-Vision dans l’arbre du programme, définissez les paramètres Type de pose du robot à envoyer, Mech-Vision Project ID, et Nombre de poses attendues dans le panneau Trigger Mech-VisionMech-Vision à droite.
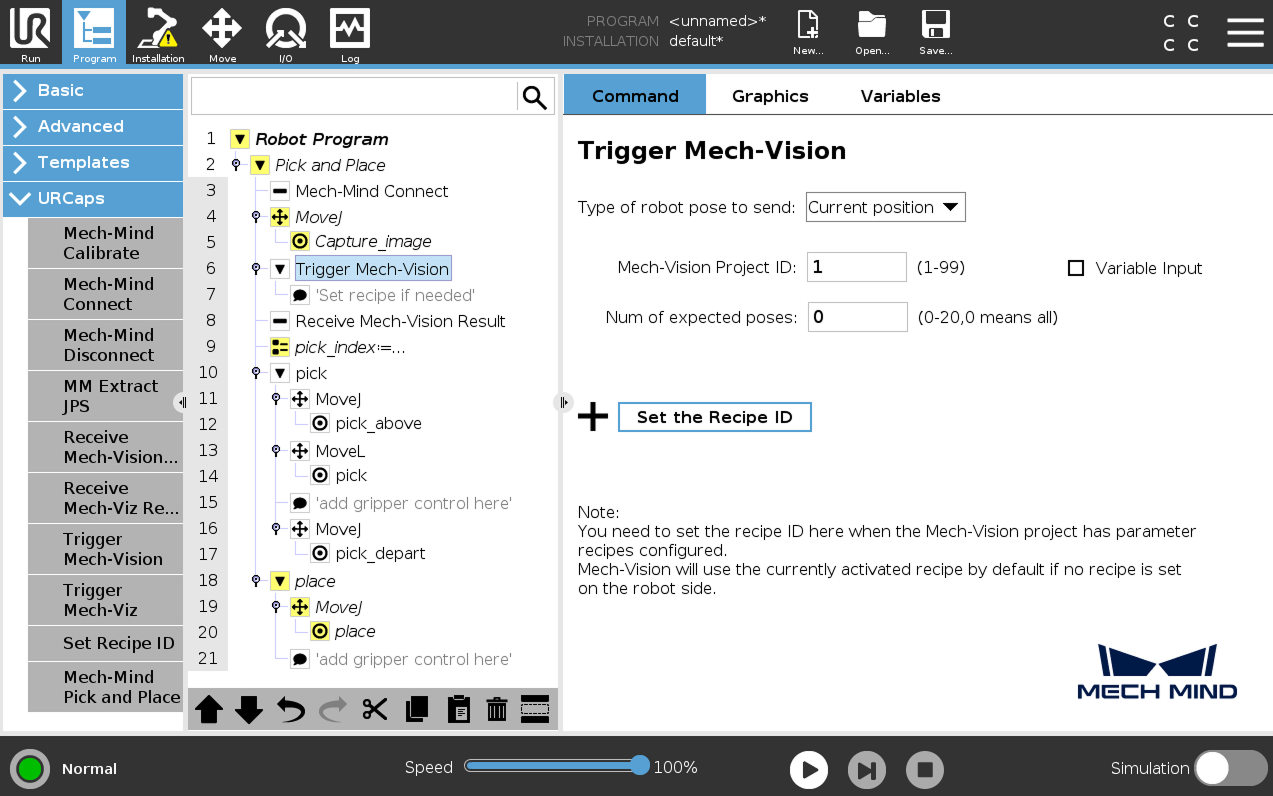
Paramètre Description Type de pose du robot à envoyer
Spécifiez le type de pose du robot à envoyer au projet Mech-Vision. Dans cet exemple, sélectionnez Position actuelle.
-
Position actuelle : Envoie les positions articulaires actuelles du robot et la pose de bride au projet Mech-Vision. Ce réglage doit être utilisé lorsque la caméra est montée en mode eye in hand.
-
JPs prédéfinis : Envoie les positions articulaires personnalisées au projet Mech-Vision. Ces positions articulaires seront envoyées à l’Étape « Path Planning » du projet Mech-Vision comme point de départ, où le robot se déplacera de ce point de départ au premier point de passage de la trajectoire planifiée. Ce réglage doit être utilisé lorsque la caméra est montée en mode eye to hand, que le projet inclut une Étape « Path Planning », et qu’une pré-capture est requise.
Mech-Vision project ID
L’index du projet Mech-Vision à déclencher. Vous pouvez trouver l’ID du projet dans le panneau Project List de Mech-Vision.
Nombre de poses attendues
Le nombre de poses attendues à être produites par Mech-Vision.
-
S’il est défini sur 0, Mech-Vision renverra toutes les poses reconnues.
-
S’il est défini sur un entier entre 1 et 20, Mech-Vision renverra le nombre spécifié de poses lorsque le nombre total de poses reconnues dépasse la valeur attendue. Si le nombre total de poses reconnues est inférieur à la valeur attendue, Mech-Vision renverra toutes les poses reconnues.
-
-
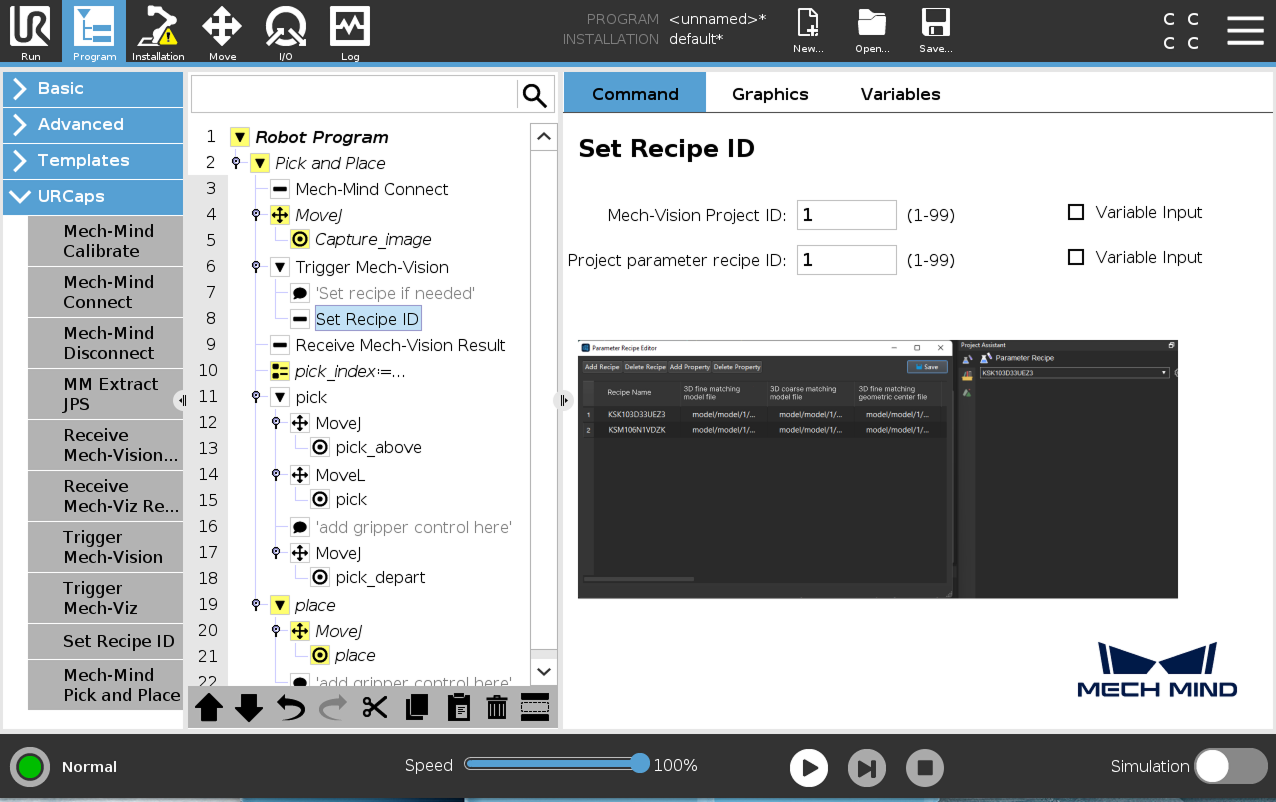
(Facultatif) Appuyez sur Définir l’ID de recette et un nœud Définir l’ID de recette est ajouté sous le nœud Trigger Mech-Vision dans l’arbre du programme.
Sélectionnez le nœud Définir l’ID de recette, et définissez les valeurs pour Project Parameter Recipe ID dans le panneau Définir l’ID de recette à droite. La valeur du paramètre Mech-Vision Project ID doit être cohérente avec la valeur définie dans le nœud précédent.
-
-
Définissez la manière de recevoir le résultat Mech-Vision.
Dans l’arbre du programme, sélectionnez le nœud Receive Mech-Vision Result, définissez le Result type et le Return pose type, puis définissez le nom des variables pour enregistrer les données renvoyées.
Étant donné que la fonction de cet exemple est d’obtenir des points de prise à partir de Mech-Vision, le Result type ne peut être défini que sur Basic ou Custom, et ne peut pas être défini sur Planned path. 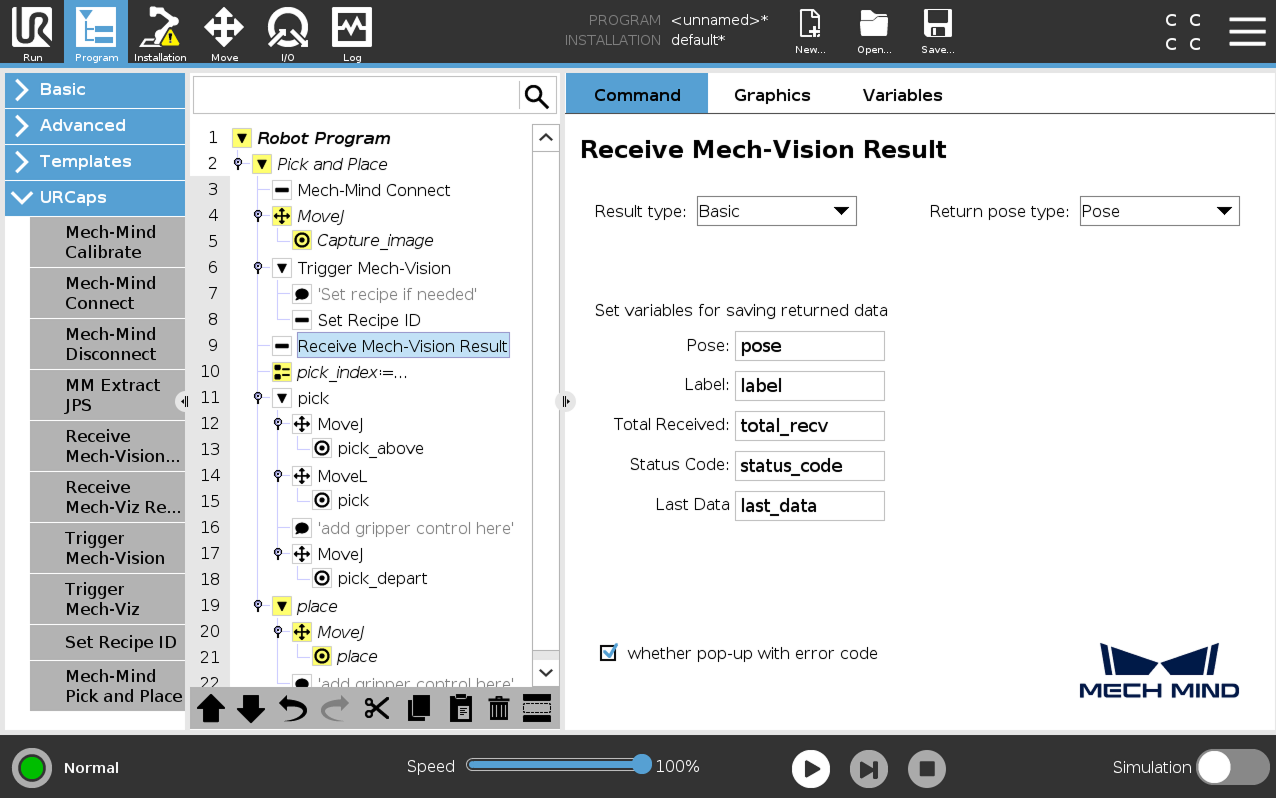
-
Lorsque le Result type est défini sur Basic, le Return pose type ne peut être défini que sur Pose, ce qui indique que le type de pose reçu est le TCP. Les explications des autres paramètres sont présentées dans le tableau ci-dessous.
Paramètre Description Pose
La pose ici fait référence au TCP du robot. Les poses produites par Mech-Vision (c’est-à-dire les données du port poses de l’Étape « Output ») seront automatiquement converties par le système de vision en le TCP correspondant du robot. Le robot avec le TCP actif peut se déplacer directement vers la pose obtenue ici. Par défaut, les poses sont enregistrées dans la variable de tableau pose[], avec l’index de départ du tableau à 1.
Label
L’étiquette correspond à chaque pose. Sa valeur est un entier. Par défaut, les étiquettes sont enregistrées dans la variable de tableau label[], avec l’index de départ du tableau à 1.
Total Received
Le nombre de poses reçues de Mech-Vision. Par défaut, enregistré dans la variable total_recv.
Status code
Le code d’état renvoyé par Mech-Vision. Les codes commençant par 11xx indiquent un état normal, tandis que les codes commençant par 10xx indiquent des erreurs. Pour des informations détaillées, consultez Codes d’état et dépannage. Par défaut, le code d’état est enregistré dans la variable status_code.
Last Data
Indique si toutes les poses reconnues ont été reçues de Mech-Vision. La valeur est 0 ou 1, où 0 signifie que toutes les poses ne sont pas reçues, et 1 signifie que toutes les poses sont reçues. Par défaut, cette information est enregistrée dans la variable last_data.
-
Lorsque le Result type est défini sur Custom, le Return pose type ne peut être défini que sur Pose, ce qui indique que le type de pose reçu est le TCP. Les explications des autres paramètres sont présentées dans le tableau ci-dessous. De plus, vous devez définir Port Type de l’Étape Output sur Custom et sélectionner le port poses dans la section Predefined Keys dans Mech-Vision.
Paramètre Description Pose
La pose ici fait référence au TCP du robot. Les poses produites par Mech-Vision (c’est-à-dire les données du port poses de l’Étape « Output ») seront automatiquement converties par le système de vision en le TCP correspondant du robot. Le robot avec le TCP actif peut se déplacer directement vers la pose obtenue ici. Par défaut, les poses sont enregistrées dans la variable de tableau pose[], avec l’index de départ du tableau à 1.
Label
L’étiquette correspond à chaque pose. Sa valeur est un entier. Par défaut, les étiquettes sont enregistrées dans la variable de tableau label[], avec l’index de départ du tableau à 1.
Custom data
Les données personnalisées associées à la pose. Par défaut, les données personnalisées sont enregistrées dans la variable de tableau custom_data[], avec l’index de départ du tableau à 1.
Total Received
Le nombre de poses reçues de Mech-Vision. Par défaut, enregistré dans la variable total_recv.
Status code
Le code d’état renvoyé par Mech-Vision. Les codes commençant par 11xx indiquent un état normal, tandis que les codes commençant par 10xx indiquent des erreurs. Pour des informations détaillées, consultez Codes d’état et dépannage. Par défaut, le code d’état est enregistré dans la variable status_code.
Last Data
Indique si toutes les poses reconnues ont été reçues de Mech-Vision. La valeur est 0 ou 1, où 0 signifie que toutes les poses ne sont pas reçues, et 1 signifie que toutes les poses sont reçues. Par défaut, cette information est enregistrée dans la variable last_data.
-
-
Définissez le premier point de prise.
Sélectionnez le nœud pick_index:=…, et définissez la valeur Expression sur 1 dans le panneau de droite.
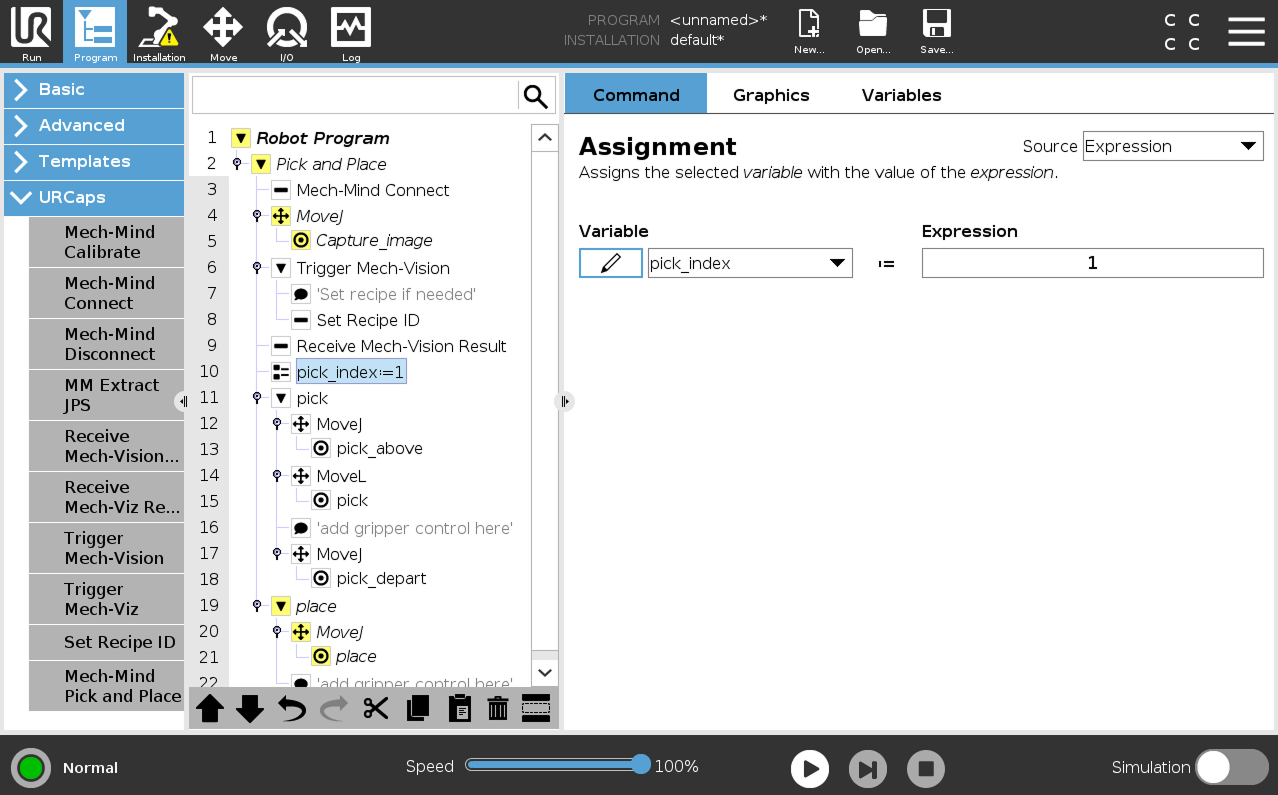
pick_index est utilisé pour attribuer une valeur à la variable pick. Une valeur de 1 signifie que la pose du premier point de prise reçu sera attribuée à la variable pick, une valeur de 2 signifie que la pose du deuxième point de prise reçu sera attribuée à la variable pick, et ainsi de suite. Ce paramètre est utilisé pour étendre le programme d’exemple avec une boucle afin de permettre plusieurs prises à partir d’une seule image. -
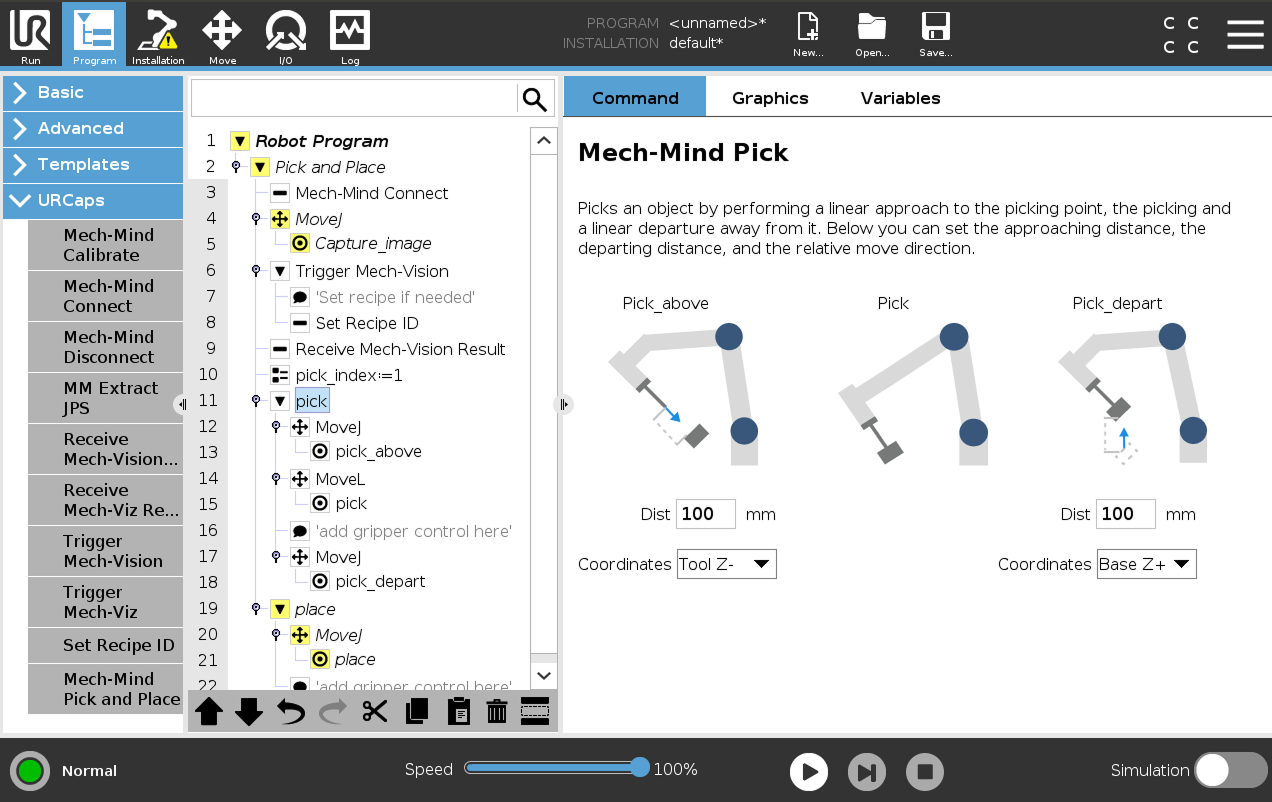
Définissez la tâche de prise.
Une tâche de prise se compose de trois mouvements : Pick_above (un mouvement linéaire vers le point d’approche pour la prise), Pick (un mouvement vers le point de prise pour saisir l’objet), et Pick_depart (un mouvement linéaire pour s’éloigner après la prise).
-
Définissez les paramètres Dist et Coordinates pour Pick_above et Pick_depart respectivement dans le panneau Mech-Mind Pick à droite.
-
Sélectionnez le nœud MoveJ sous le nœud pick, et conservez les paramètres par défaut dans le panneau Déplacement à droite.
-
Sélectionnez le nœud pick_above, et conservez les paramètres par défaut dans le panneau Point de passage à droite.
-
Sélectionnez le nœud MoveL, et conservez les paramètres par défaut dans le panneau Déplacement à droite.
-
Sélectionnez le nœud pick, et conservez les paramètres par défaut dans le panneau Point de passage à droite.
-
Ajoutez une logique de contrôle de la pince pour la prise après le nœud pick selon vos conditions réelles.
-
Sélectionnez le nœud MoveJ, et conservez les paramètres par défaut dans le panneau Déplacement à droite.
-
Sélectionnez le nœud pick_depart, et conservez les paramètres par défaut dans le panneau Point de passage à droite.
-
-
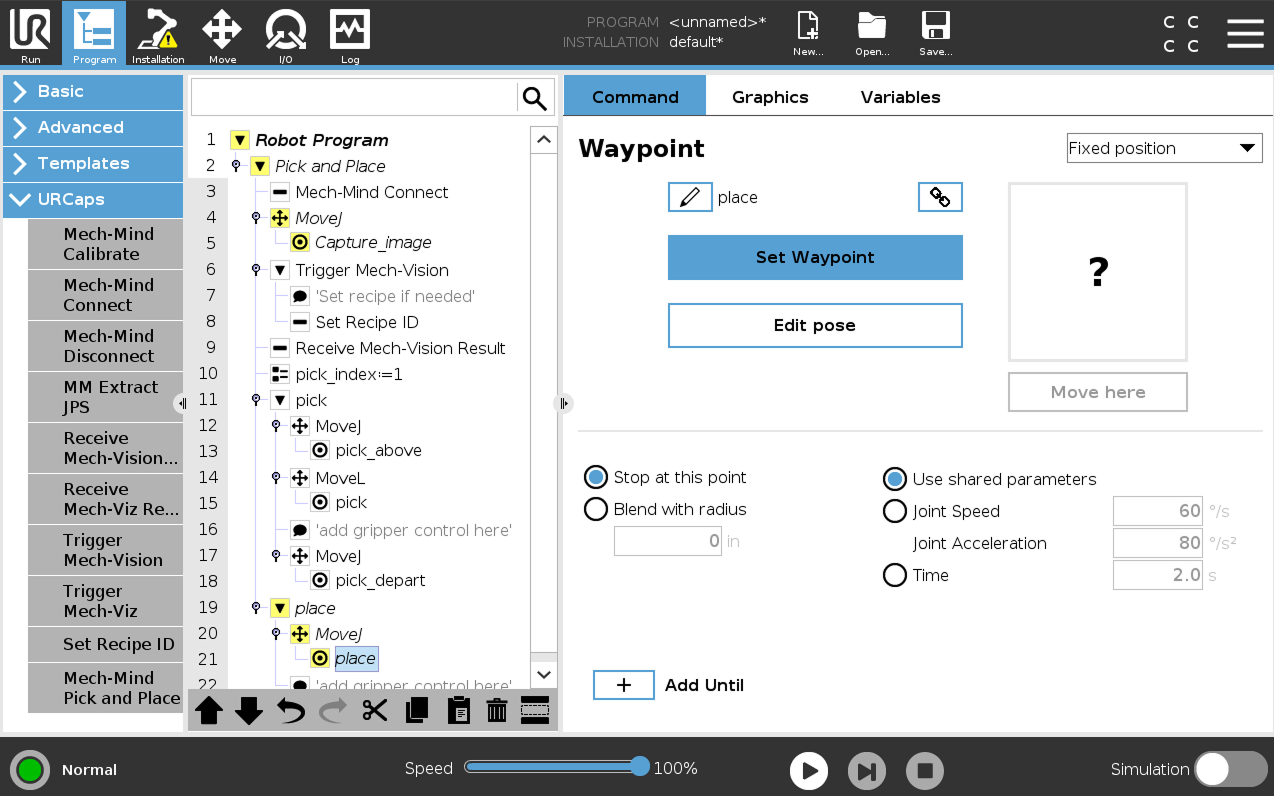
Définissez la tâche de dépose.
-
Sélectionnez le nœud MoveJ sous le nœud place, et conservez les paramètres par défaut dans le panneau Déplacement à droite.
-
Déplacez manuellement le robot vers l’emplacement approprié pour déposer l’objet saisi.
-
Revenez au pupitre d’enseignement, sélectionnez le nœud place sous le nœud MoveJ, et appuyez sur Définir le point de passage dans le panneau Point de passage à droite. Vous serez basculé vers l’onglet Déplacement.
-
Dans l’onglet Déplacement, confirmez que la pose actuelle de la bride du robot est correcte et appuyez sur OK.
-
Une fois la pose de dépose définie, ajoutez une logique de contrôle de la pince pour la dépose après le nœud place dans l’arbre du programme selon vos conditions réelles.
-
À ce stade, un simple programme de prise et dépose avec Mech-Vision (points de prise) a été terminé. Vous pouvez l’exécuter en appuyant sur ![]() dans la barre inférieure.
dans la barre inférieure.
Créer un programme de prise et dépose avec Mech-Vision (trajectoire de prise)
Pour créer un programme de prise et dépose avec Mech-Vision (trajectoire de prise), suivez ces étapes :
-
Activez l’option Avec Vision (trajectoire de prise).
-
Dans la barre supérieure du pupitre d’enseignement UR, appuyez sur Nouveau et sélectionnez Programme pour créer un nouveau programme.
-
Appuyez sur Programme dans la barre supérieure, puis sélectionnez . Un nœud de programme d’exemple Prise et dépose est automatiquement créé sous le Programme du robot dans le panneau de gauche.
-
Dans l’onglet Commande du panneau de droite, appuyez sur le bouton Avec Vision (trajectoire de prise). Un modèle de programme est automatiquement créé sous le nœud Prise et dépose dans l’arbre du programme.
-
-
Définissez la valeur de Host IP sur l’adresse IP de l’IPC Mech-Mind en vous référant à l’étape 2 dans Prise et dépose avec Mech-Vision (points de prise).
-
Définissez la pose de capture d’image en vous référant à l’étape 3 dans Prise et dépose avec Mech-Vision (points de prise).
-
Consultez la manière de déclencher l’exécution du projet Mech-Vision en vous référant à l’étape 4 dans Prise et dépose avec Mech-Vision (points de prise).
-
Définissez la manière de recevoir le résultat Mech-Vision.
Sélectionnez le nœud Receive Mech-Vision Result, définissez le Result type et le Return pose type, puis définissez le nom des variables pour enregistrer les données renvoyées.
Étant donné que la fonction de cet exemple est d’obtenir la trajectoire planifiée à partir de Mech-Vision, le Result type ici ne peut être défini que sur Planned path. 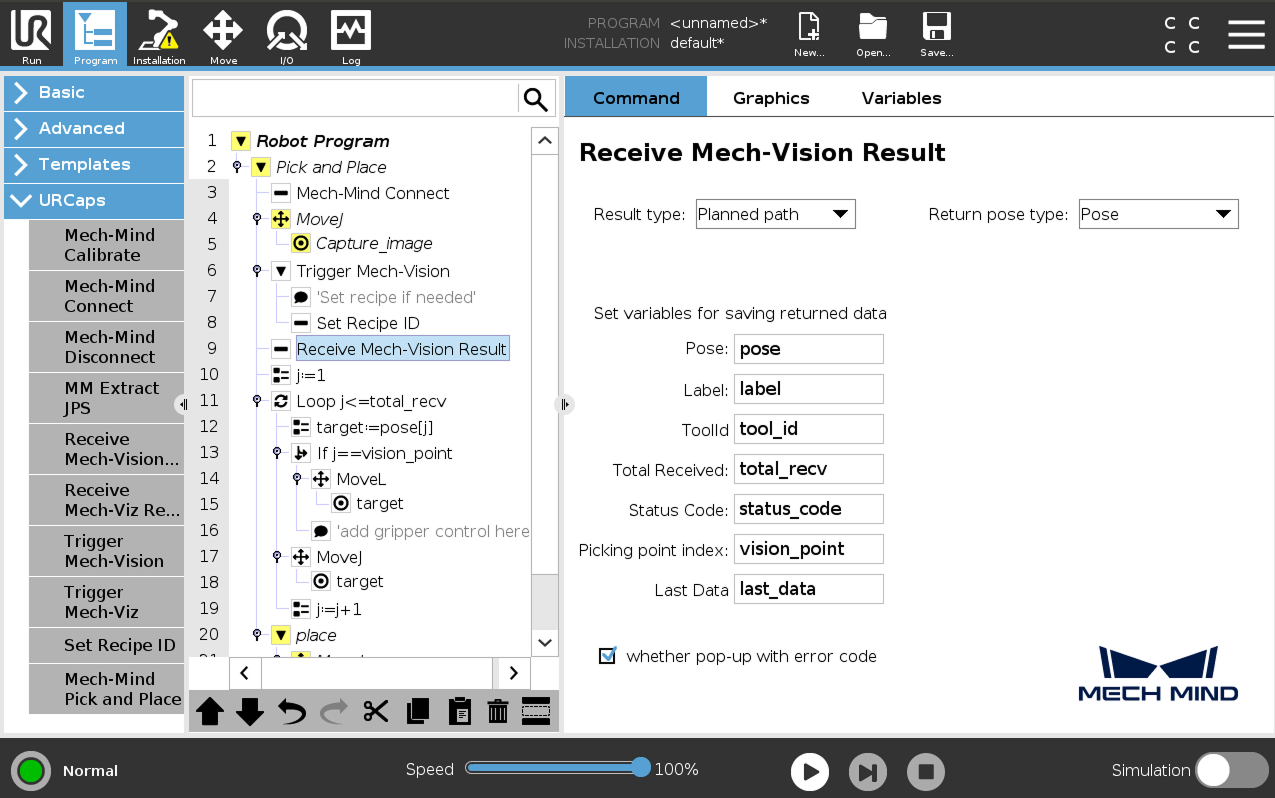
-
Lorsque le Result type est défini sur Planned path, et que le Return pose type est défini sur Pose, cela indique que le type de pose reçu est le TCP. Les explications des autres paramètres sont présentées dans le tableau ci-dessous.
Paramètre Description Pose
La pose ici fait référence au TCP du robot. Par défaut, les poses sont enregistrées dans la variable de tableau pose[], avec l’index de départ du tableau à 1.
Label
L’étiquette correspond à chaque pose. Sa valeur est un entier. Par défaut, les étiquettes sont enregistrées dans la variable de tableau label[], avec l’index de départ du tableau à 1.
TCP
L’ID d’outil correspond à la pose envoyée. Sa valeur est un entier. Par défaut, les ID d’outil sont enregistrés dans la variable de tableau label[], avec l’index de départ du tableau à 1.
Total Received
Le nombre de poses reçues de Mech-Vision. Par défaut, enregistré dans la variable total_recv.
Status code
Le code d’état renvoyé par Mech-Vision. Les codes commençant par 11xx indiquent un état normal, tandis que les codes commençant par 10xx indiquent des erreurs. Pour des informations détaillées, consultez Codes d’état et dépannage. Par défaut, le code d’état est enregistré dans la variable status_code.
Picking point index
Indique la position du point de passage Vision Move correspondant à l’Étape « Vision Move » de l’outil de planification de trajectoire dans l’ensemble de la trajectoire. Si la trajectoire ne contient pas de point de passage « Vision Move », la valeur de ce paramètre est 0. Par défaut, l’index du point de vision est enregistré dans la variable vision_point.
Par exemple, si la trajectoire planifiée se compose des points de passage suivants : « Fixed-Point Move 1 », « Fixed-Point Move_2 », « Vision Move », « Fixed-Point Move_3 », la position du point de passage Vision Move est 3.
Last Data
Indique si toutes les poses de la trajectoire planifiée ont été reçues de Mech-Vision. La valeur est 0 ou 1, où 0 signifie que toutes les poses ne sont pas reçues, et 1 signifie que toutes les poses sont reçues. Par défaut, cette information est enregistrée dans la variable last_data.
-
Lorsque le Result type est défini sur Planned path, et que le Return pose type est défini sur Jps, cela indique que le type de pose reçu est la position articulaire. Les explications pour label, toolID, et les autres paramètres sont telles que présentées dans le tableau ci-dessus. Par défaut, les données de positions articulaires sont enregistrées dans la variable de tableau jps[]. Veuillez ne pas utiliser directement la variable de tableau jps[] ; les utilisateurs doivent extraire la variable de tableau avant d’utiliser les positions articulaires qu’elle contient. Pour cet exemple, les utilisateurs peuvent extraire les positions articulaires en suivant les étapes ci-dessous.
-
Sélectionnez le nœud Receive Mech-Vision Result et sélectionnez Jps pour le Return pose type.
-
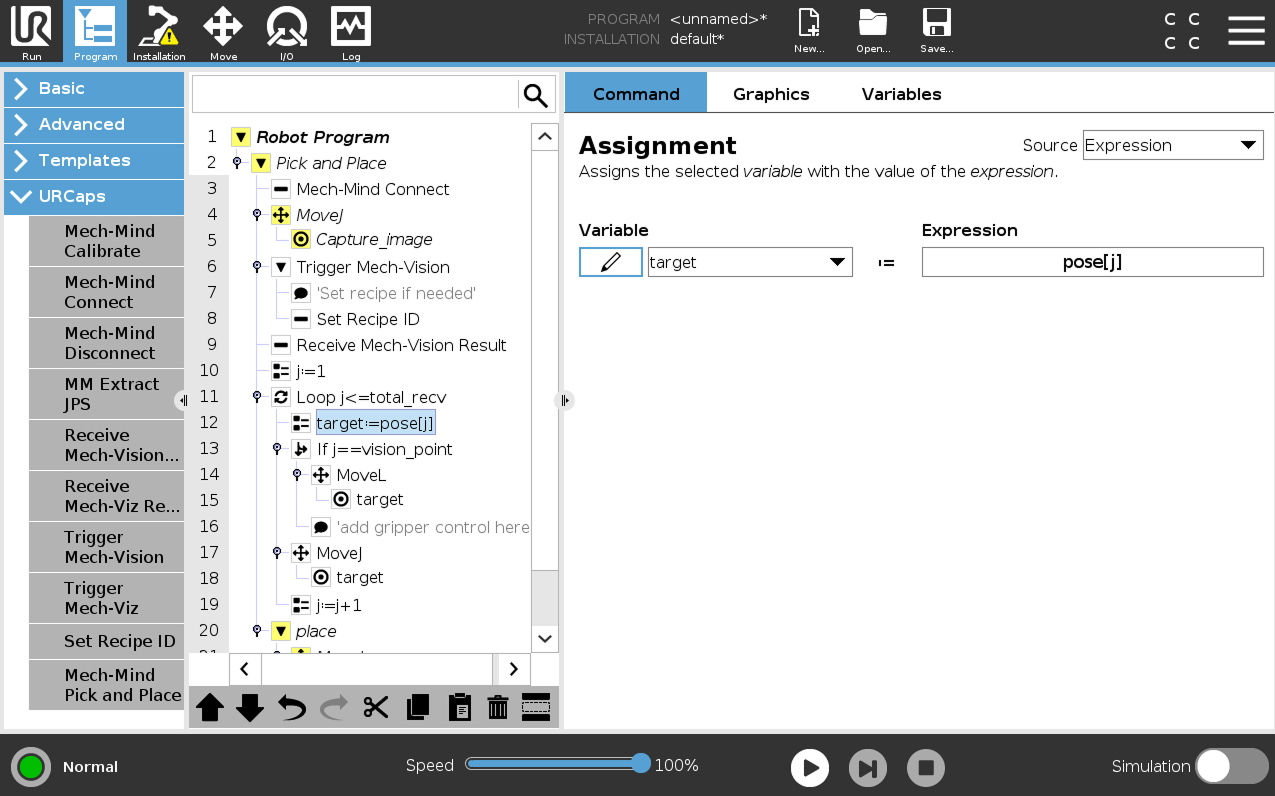
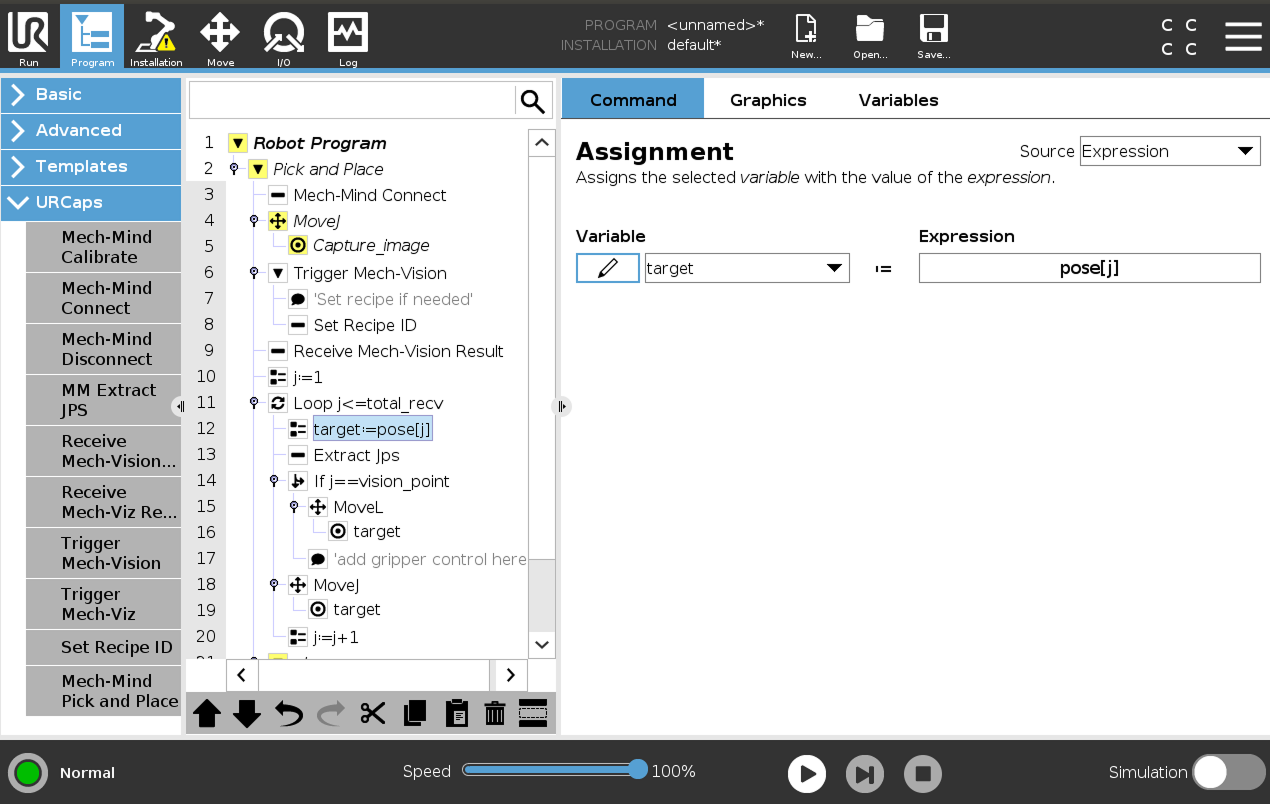
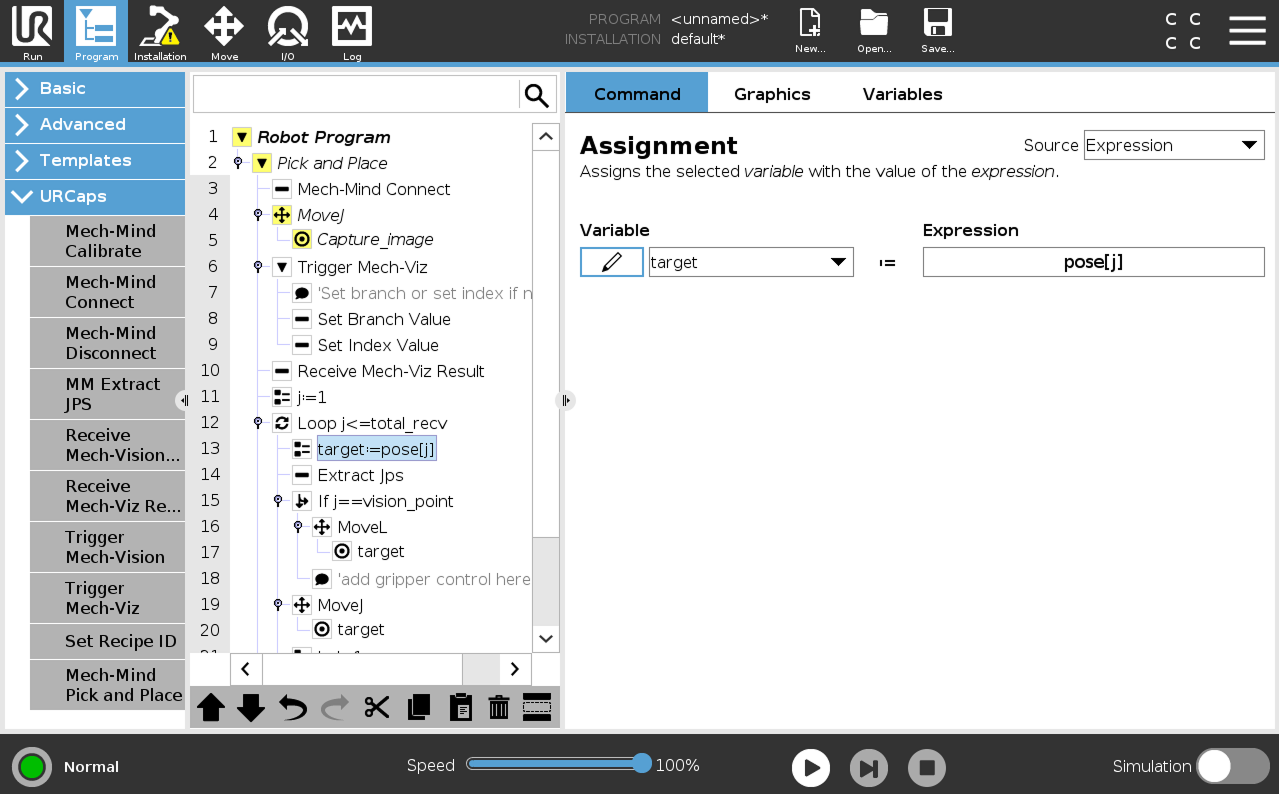
Sélectionnez le nœud target:=pose[j], puis sélectionnez , et le nœud Extract Jps apparaîtra.
-
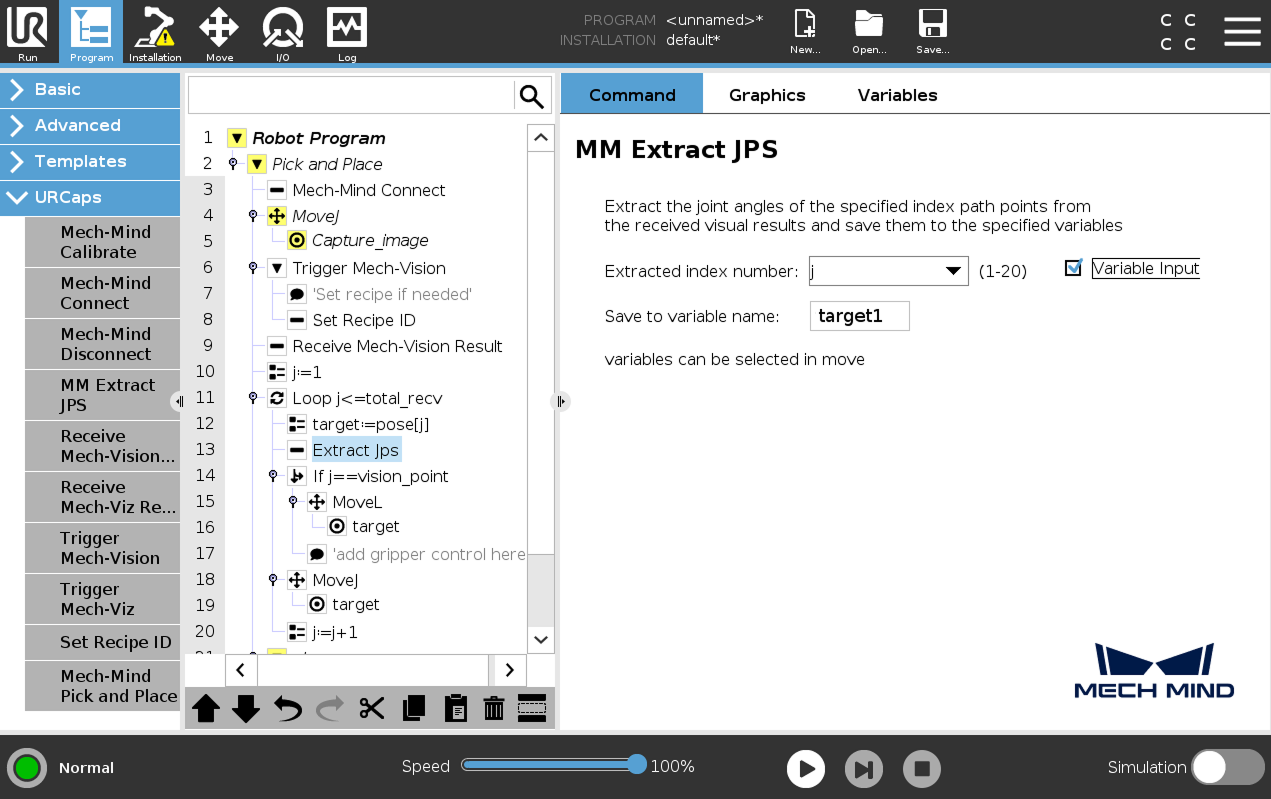
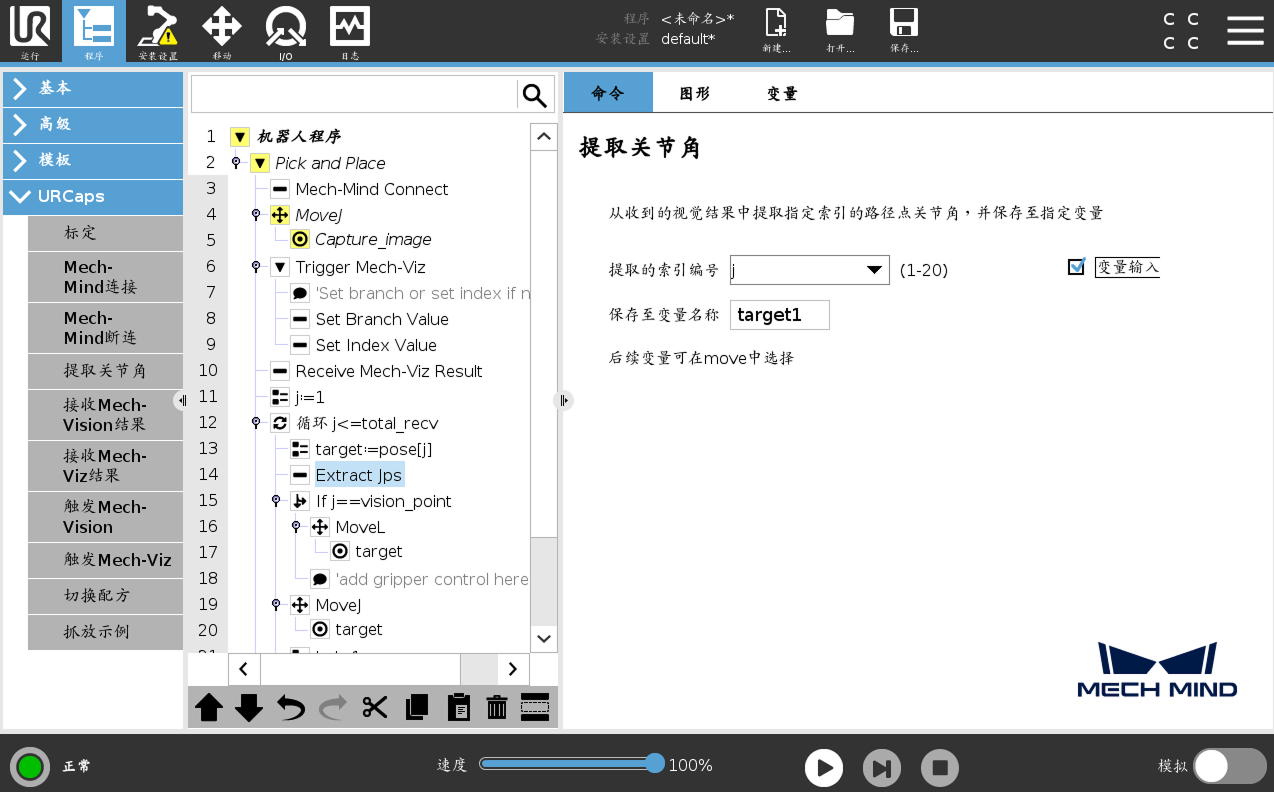
Sélectionnez le nœud Extract Jps, cochez Variable Input, sélectionnez j comme Extracted index number, et saisissez enfin target1 dans le champ Save to variable name.
-
Sélectionnez le nœud target:=pose[j], puis appuyez sur Delete dans la barre d’outils ci-dessous pour supprimer le nœud.
-
Remplacez la variable target dans les nœuds suivants par la variable target1.
-
-
-
Configurez la boucle de mouvement, qui amène le robot à suivre la trajectoire planifiée par l’Étape « Path Planning », c’est-à-dire approcher l’objet, saisir l’objet, et s’éloigner du point de prise (sans inclure la dépose de l’objet). Pour savoir comment définir les nœuds MoveL et MoveJ, reportez-vous à l’étape 7 dans Prise et dépose avec Mech-Vision (points de prise).
-
Dans des applications réelles, la boucle de mouvement peut contenir plusieurs nœuds MoveJ pick_above, un nœud MoveL pick, et plusieurs nœuds MoveJ pick_depart.
-
Si vous modifiez les noms de variables par défaut des poses, étiquettes, etc. dans le nœud Receive Mech-Vision Result, vous devez modifier les variables utilisées dans cette étape.
-
-
Définissez la tâche de dépose en vous référant à l’étape 8 dans Prise et dépose avec Mech-Vision (points de prise).
À ce stade, un simple programme de prise et dépose avec Mech-Vision (trajectoire de prise) a été terminé. Vous pouvez l’exécuter en appuyant sur ![]() dans la barre inférieure.
dans la barre inférieure.
Créer un programme de prise et dépose avec Mech-Viz
Pour créer un programme de prise et dépose avec Mech-Viz, suivez ces étapes :
-
Activez l’option Avec Mech-Viz.
-
Dans la barre supérieure du pupitre d’enseignement UR, appuyez sur Nouveau et sélectionnez Programme pour créer un nouveau programme.
-
Appuyez sur Programme dans la barre supérieure, puis sélectionnez . Un nœud de programme d’exemple Prise et dépose est automatiquement créé sous le Programme du robot dans le panneau de gauche.
-
Dans l’onglet Commande du panneau de droite, appuyez sur le bouton Avec Mech-Viz. Un modèle de programme est automatiquement créé sous le nœud Prise et dépose dans l’arbre du programme.
-
-
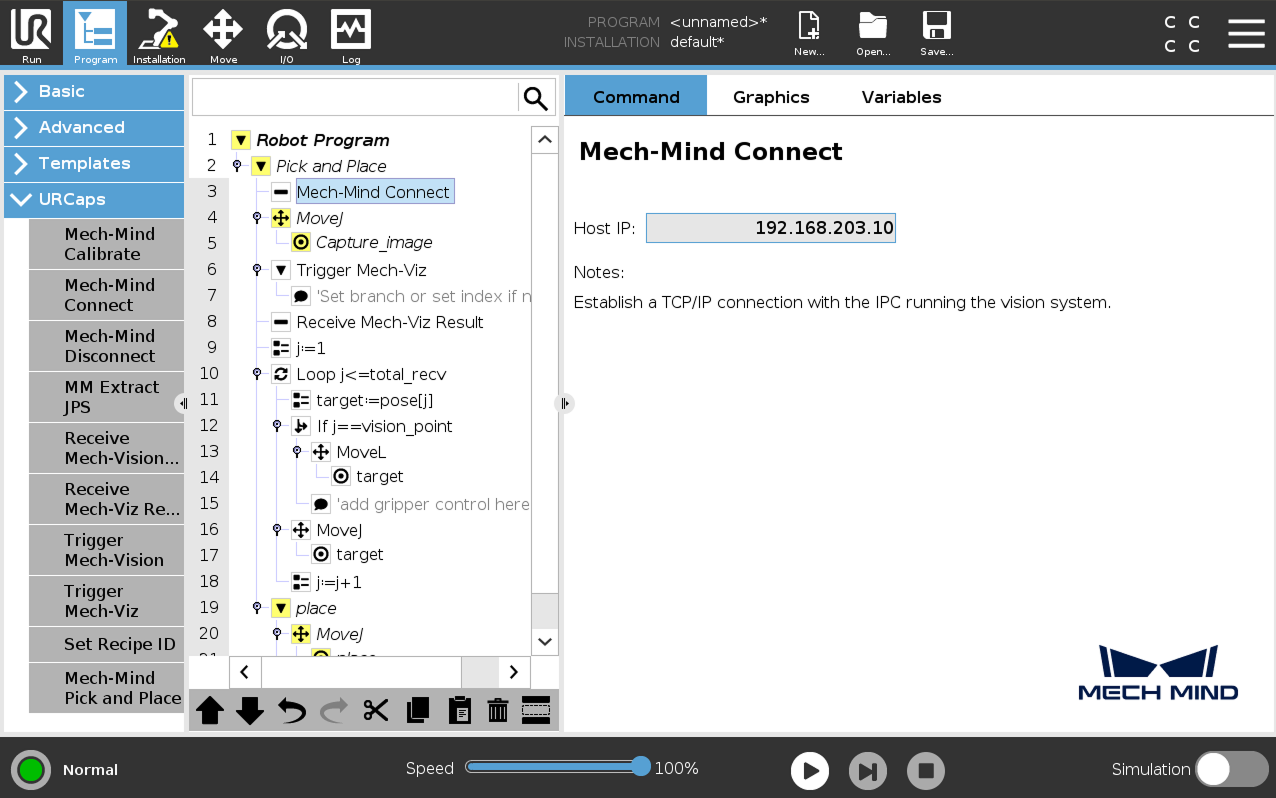
Sélectionnez le nœud Mech-Mind Connect, et vérifiez que le paramètre Host IP est l’adresse IP de l’IPC Mech-Mind dans le panneau Mech-Mind Connect à droite.
-
Définissez la pose de capture d’image en vous référant à l’étape 3 dans Prise et dépose avec Mech-Vision (points de prise).
-
Déclenchez l’exécution du projet Mech-Viz.
-
Sélectionnez le nœud Trigger Mech-Viz, définissez le paramètre Type de pose du robot à envoyer dans le panneau Trigger Mech-Viz à droite. Les valeurs spécifiques des paramètres sont expliquées dans le tableau ci-dessous.
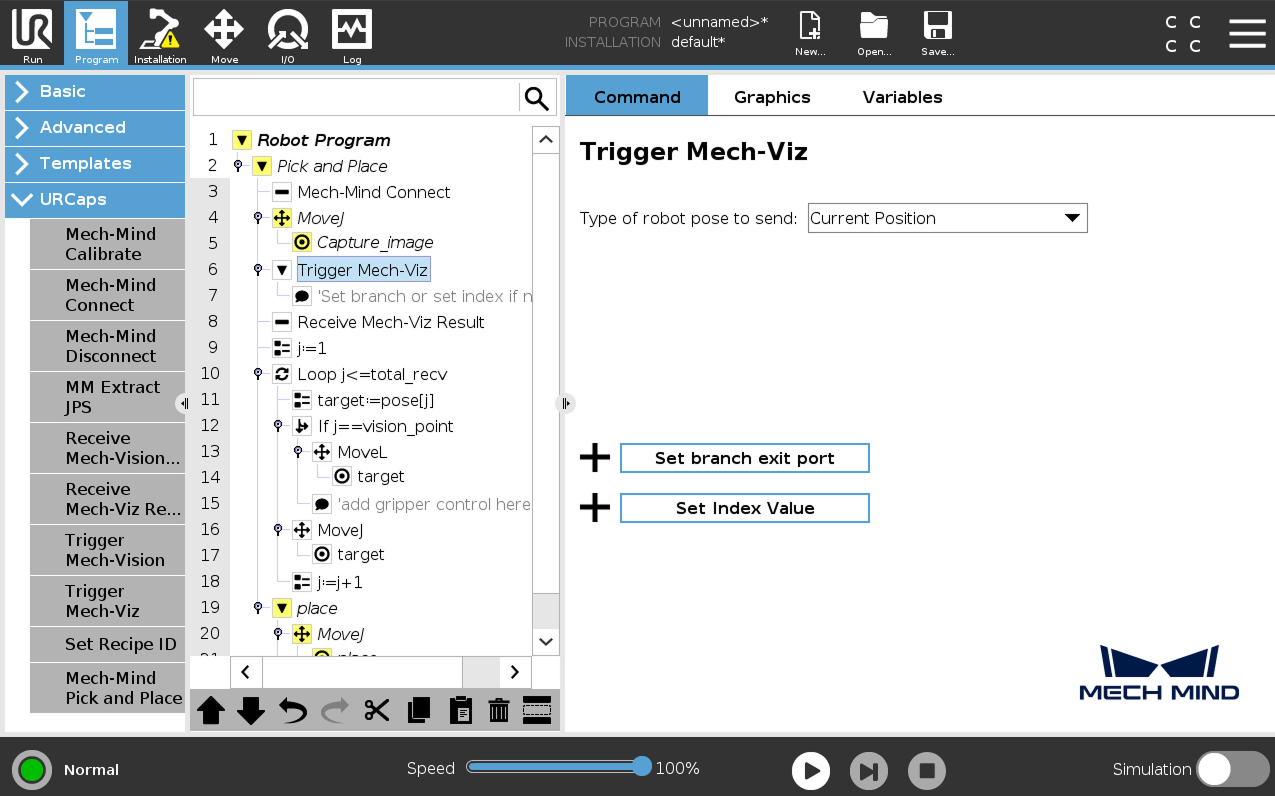
Paramètre Description Type de pose du robot à envoyer
Spécifiez le type de pose du robot à envoyer au projet Mech-Viz.
-
Position actuelle : Envoie les positions articulaires actuelles du robot et la pose de bride au projet Mech-Viz. Ce réglage doit être utilisé lorsque la caméra est montée en mode eye in hand.
-
JPs prédéfinis : Envoie les positions articulaires personnalisées au projet Mech-Viz. Cela peut être utilisé pour déclencher le projet Mech-Viz afin de planifier à l’avance le prochain cycle de trajectoires lorsque le robot est hors de la zone de capture d’image. Ce paramètre doit être utilisé lorsque la caméra est montée en mode Eye-To-Hand et qu’une image de pré-capture est requise.
-
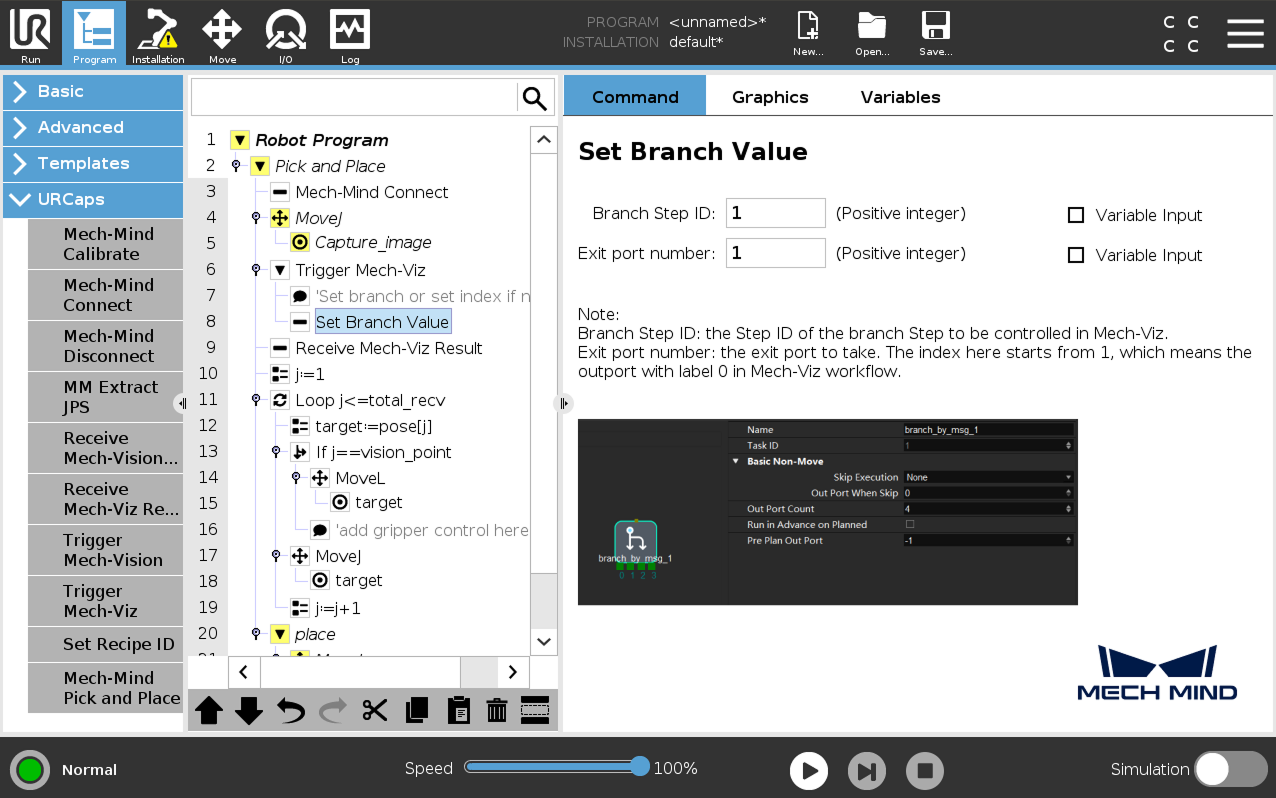
Si le projet Mech-Viz contient une Étape « Branch by Msg », appuyez sur Définir le port de sortie de branche, et passez à l’étape b pour définir le port de sortie de branche.
-
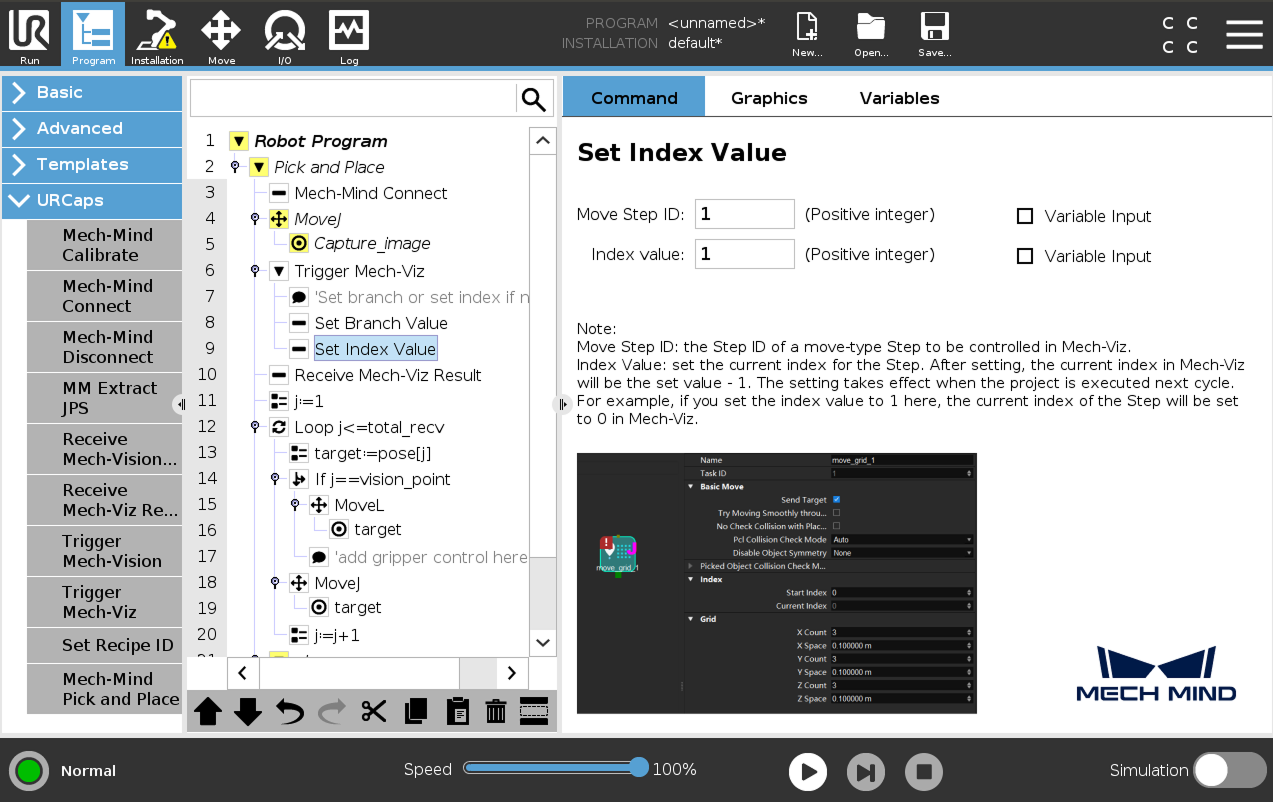
Si le projet Mech-Viz contient une Étape liée à un index, appuyez sur Définir la valeur d’index, et passez à l’étape c pour définir la valeur d’index.
-
-
(Facultatif) Sélectionnez le nœud Set Branch Value, définissez Branch Step ID et Exit port number dans le panneau de droite.
-
(Facultatif) Sélectionnez le nœud Set Index Value, définissez Move Step ID et Index value dans le panneau de droite.
-
-
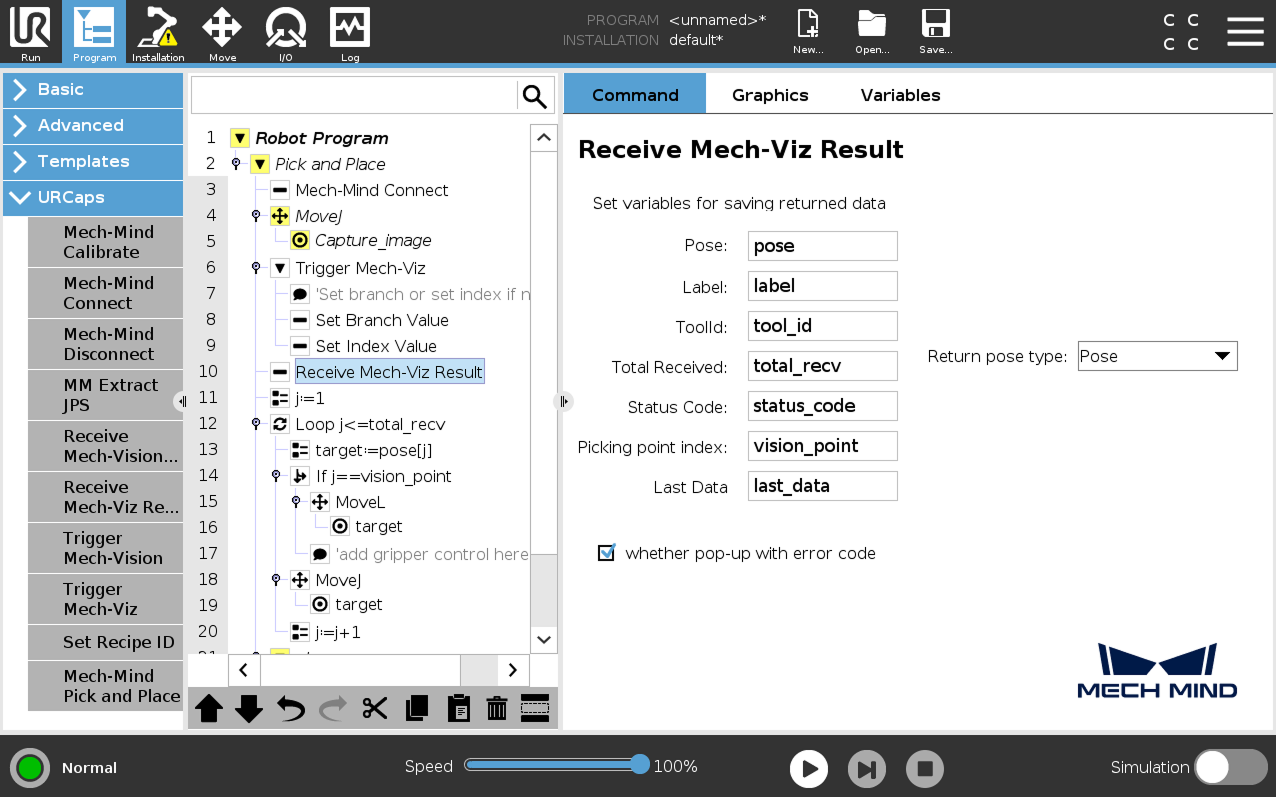
Définissez la manière de recevoir le résultat Mech-Viz.
Sélectionnez le nœud Receive Mech-Viz Result, définissez les variables pour enregistrer le résultat Mech-Viz.
-
Lorsque le Return pose type est défini sur Pose, cela indique que le type de pose reçu est le TCP. Les explications des autres paramètres sont présentées dans le tableau ci-dessous.
Paramètre Description Pose
La pose ici fait référence au TCP du robot. Par défaut, les poses sont enregistrées dans la variable de tableau pose[], avec l’index de départ du tableau à 1.
Label
L’étiquette correspond à chaque pose. Sa valeur est un entier. Par défaut, les étiquettes sont enregistrées dans la variable de tableau label[], avec l’index de départ du tableau à 1.
TCP
L’ID d’outil correspond à la pose envoyée. Sa valeur est un entier. Par défaut, les ID d’outil sont enregistrés dans la variable de tableau label[], avec l’index de départ du tableau à 1.
Total Received
Le nombre de poses reçues de Mech-Viz. Par défaut, enregistré dans la variable total_recv.
Status code
Le code d’état renvoyé par Mech-Vision. Les codes commençant par 21xx indiquent un état normal, tandis que les codes commençant par 20xx indiquent des erreurs. Pour des informations détaillées, consultez Codes d’état et dépannage. Par défaut, le code d’état est enregistré dans la variable status_code.
Picking point index
Indique la position du point de passage Vision Move (c’est-à-dire le point de passage correspondant à l’Étape « Vision Move » dans le projet) dans la trajectoire planifiée. Si la trajectoire ne contient pas de point de passage « Vision Move », la valeur de ce paramètre est 0. Par défaut, l’index du point de vision est enregistré dans la variable vision_point.
Par exemple, si la trajectoire planifiée se compose des points de passage suivants : « Fixed-Point Move 1 », « Fixed-Point Move_2 », « Vision Move », « Fixed-Point Move_3 », la position du point de passage Vision Move est 3.
Last Data
Indique si toutes les poses de la trajectoire planifiée ont été reçues de Mech-Viz. La valeur est 0 ou 1, où 0 signifie que toutes les poses ne sont pas reçues, et 1 signifie que toutes les poses sont reçues. Par défaut, cette information est enregistrée dans la variable last_data.
-
Lorsque le Return pose type est défini sur Jps, cela indique que le type de pose reçu est les JPs. Les explications pour label, toolID, et les autres paramètres sont telles que présentées dans le tableau ci-dessus. Par défaut, les données de positions articulaires sont enregistrées dans la variable de tableau jps[]. Veuillez ne pas utiliser directement la variable de tableau jps[] ; les utilisateurs doivent extraire la variable de tableau avant d’utiliser les positions articulaires qu’elle contient. Pour cet exemple, les utilisateurs peuvent extraire les positions articulaires en suivant les étapes ci-dessous.
-
Sélectionnez le nœud Receive Mech-Viz Result et sélectionnez Jps pour le Return pose type.
-
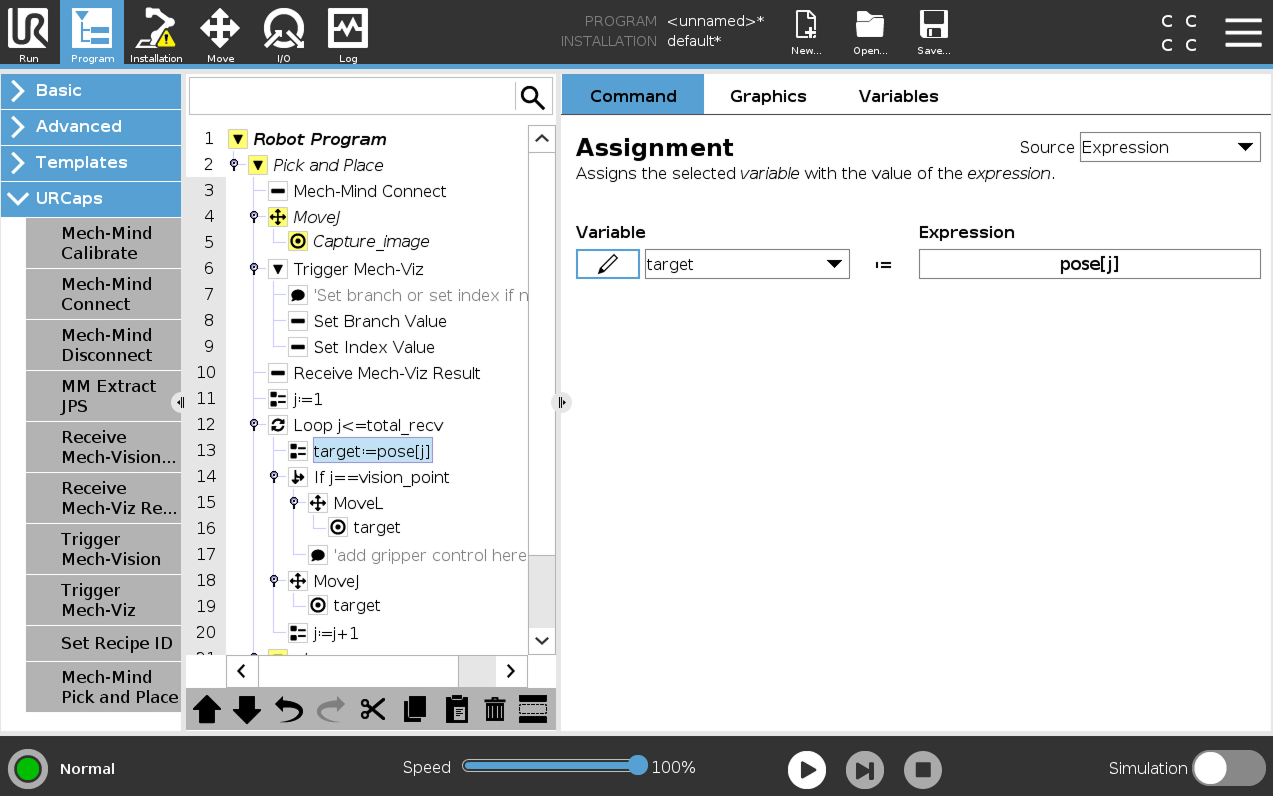
Sélectionnez le nœud target:=pose[j], puis sélectionnez , et le nœud Extract Jps apparaîtra.
-
Sélectionnez le nœud Extract Jps, cochez Variable Input, sélectionnez j comme Extracted index number, et saisissez enfin target1 dans le champ Save to variable name.
-
Sélectionnez le nœud target:=pose[j], puis appuyez sur Delete dans la barre d’outils ci-dessous pour supprimer le nœud.
-
Remplacez la variable target dans les nœuds suivants par la variable target1.
-
-
-
Configurez la boucle de mouvement, qui amène le robot à suivre la trajectoire planifiée par Mech-Viz, c’est-à-dire approcher l’objet, saisir l’objet, et s’éloigner du point de prise (sans inclure la dépose de l’objet). Pour savoir comment définir les nœuds MoveL et MoveJ, reportez-vous à l’étape 7 dans Prise et dépose avec Mech-Vision (points de prise).
-
Dans des applications réelles, la boucle de mouvement peut contenir plusieurs nœuds MoveJ pick_above, un nœud MoveL pick, et plusieurs nœuds MoveJ pick_depart.
-
Si vous modifiez les noms de variables par défaut des poses, étiquettes, etc. dans le nœud Receive Mech-Viz Result, vous devez modifier les variables utilisées dans cette étape.
-
-
Définissez la tâche de dépose en vous référant à l’étape 8 dans Prise et dépose avec Mech-Vision (points de prise).
À ce stade, un simple programme de prise et dépose avec Mech-Viz a été terminé. Vous pouvez l’exécuter en appuyant sur ![]() dans la barre inférieure.
dans la barre inférieure.